浅谈坐标系与3D打印机结构革新的关系
浅谈一种CoreXY_结构的3D_打印机设计
打印机设计
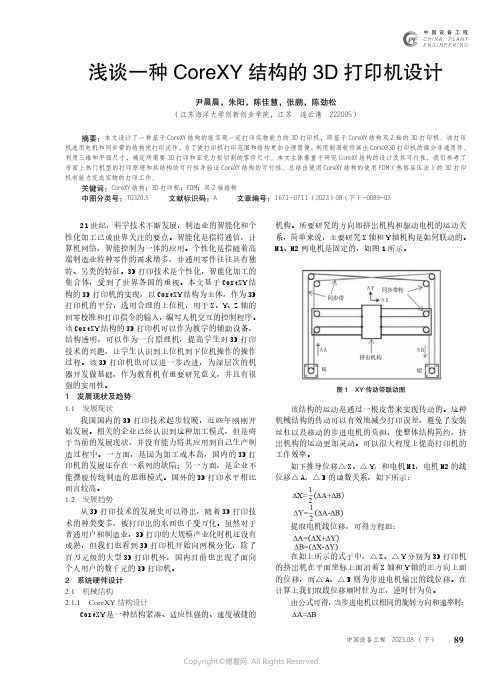
图1 XY传动带联动图
该结构的运动是通过一根皮带来实现传动的。
这种机械结构的传动可以有效地减少打印误差,避免了安装丝杠以及移动的步进电机的负担,使整体结构简约,挤出机构的运动更加灵动。
可以很大程度上提高打印机的工作效率。
如下推导位移△X、△Y,和电机M1,电机M2 A,△B的函数关系,如下所示:
提取电机线位移,可得方程组:
在如上所示的式子中,△X、△Y分别为3D
的挤出机在平面坐标上面沿着X轴和Y轴的正方向上面的位移,而△A、△B则为步进电机输出的线位移。
在
挤出机构会向X轴方向运动。
挤出机构会沿着Y轴方向运动。
挤出机构会沿着Y=X方向移动。
挤出机构沿着Y=-X方向移动。
图2 左右X轴光轴支座
CoreXY所独有的结构,其在四角都有安装用于约束同步轮的3D打印机装置,固定方式则是采用
的内六角平头螺钉和欧标M4的型材螺母固定而成。
如所示。
为提高挤出机在XY轴中可运动的范围。
挤出机架热机构。
如图4所示。
图4 散热管结构件
CoreXY的亚克力板切割件搭建
整体框架除了XY轴的电机以外,辅助CoreXY
Z轴结构。
双Z轴是指打印平台的左右两侧各有一份电机组合。
电机通过联轴器,与丝杠相连。
双电机在平衡受力增加稳定性的同时,最主要的作用是控制
图3 骨架光轴支架。
工业机械行业的技术革新前沿技术与应用案例

工业机械行业的技术革新前沿技术与应用案例随着科技的不断发展,工业机械行业也在迅速进步。
技术革新成为了行业发展的主要动力,推动着机械制造业向着更高效、智能化方向发展。
本文将介绍几种工业机械领域的前沿技术及其应用案例。
一、3D打印技术3D打印技术作为一项革命性的制造技术,正在深刻改变着工业机械行业。
通过3D打印技术,制造商可以快速、灵活地生产出复杂形状零部件,极大地提高了生产效率和品质。
例如,汽车制造商可以使用3D打印技术制造出更轻、更强、更省油的汽车零部件。
此外,航空航天领域也广泛应用3D打印技术,可以制造出复杂的航空发动机部件和轻质化的航空航天结构件,提升了飞行器的性能。
二、机器人技术机器人技术是工业机械行业的另一个重要前沿技术。
机器人不仅可以在生产线上代替人工劳动力,还可以完成一些复杂、危险的任务,提高生产效率和安全性。
例如,在汽车制造领域,机器人可以完成焊接、涂装、装配等工作,大大提高了生产线的效率和品质。
另外,在医疗领域,机器人手术系统可以实现高精度、微创的手术操作,提高了手术的成功率和患者的康复速度。
三、物联网技术物联网技术是将传感器和互联网技术相结合,实现设备之间的互联互通。
在工业机械领域,物联网技术可以实现设备的远程监测和控制,提高生产过程的可视化和自动化水平。
例如,在工厂的生产线中,通过物联网技术可以实时监测设备运行状态和生产数据,及时发现并解决问题,提高生产线的稳定性和可靠性。
此外,物联网技术还可以实现设备之间的智能连接,形成一个智能化的生产系统,提高整体生产效率和管理水平。
四、虚拟现实技术虚拟现实技术可以将用户带入一个虚拟的环境中,并与其进行交互体验。
在工业机械领域,虚拟现实技术可以用于产品设计、装配和培训等方面。
例如,在产品设计中,通过虚拟现实技术可以实现产品的三维可视化和交互式设计,快速验证产品的性能和可行性。
在装配方面,工人可以通过虚拟现实技术进行培训和模拟操作,提高装配的精度和效率。
基于FDM 3D打印机机械结构和控制系统设计的研究

基于FDM 3D打印机机械结构和控制系统设计的研究
童和平;张香红;肖晓兰;李达人
【期刊名称】《机电工程技术》
【年(卷),期】2024(53)4
【摘要】研究FDM技术支持下的3D打印机设计策略。
使用步进控制精度在0.002 mm的丝杠滑块和步进电机的核心坐标控制系统,分别使用1组丝杠控制X 轴和Y轴的定位,使用2组丝杠控制Z轴的定位,使用3组FDM挤出系统控制彩色打印过程,在探讨了坐标控制算法和冷却成型算法后,设计了一种包含7个执行机构且有LED综合状态显示功能的3D打印机机械结构和控制系统,且该系统可直接通过USB连接线从桌面端直接将文件传输到3D打印机的ARM系统中。
基于FDM 3D打印机机械结构和控制系统设计的研究,可以得出:通过对坐标控制算法和冷却成型算法进行革新,提升对步进电机的控制策略,增加驱动程序可识别的3D模型文件种类,对FDM材料的成型过程进行进一步优化控制,是未来FDM技术支持下的3D打印机重点发展方向。
【总页数】4页(P180-183)
【作者】童和平;张香红;肖晓兰;李达人
【作者单位】广东开放大学机电工程学院;广东工业大学机电工程学院
【正文语种】中文
【中图分类】TP334
【相关文献】
1.基于FDM的彩色3D打印机控制系统设计
2.基于恒温控制的FDM3D打印机PID系统设计
3.FDM技术下的3D打印机机械结构和控制系统设计探讨
4.基于FDM工艺的3D打印机机械结构设计
5.基于FDM技术的多喷头3D打印机机械结构和控制系统关键技术研究
因版权原因,仅展示原文概要,查看原文内容请购买。
浅谈坐标系与3D打印机结构革新的关系

以上两类 3 D打印机是 3 D打印技术诞 生至今 最为成熟 的 , 而其新颖 的打印结构都可 以归功 于对数 学坐标系原理 的运 用 。 在众多坐标 系中 , 除了笛 卡尔坐标系 ( 空间直角坐标 系 ) 和球 坐 标系外 , 还有极坐标系 、 柱坐标系等。通过对这些坐标系 的运用 拓展 , 我们可 以进一步研 究驱 动 3 D打印机结构革新 的因素 。 近期来 自俄亥 俄州 的 P M a r 3 D公 司在 C E S展会上 展示 出 了一款新型结构的 3 D打 印机 ,一种基 于极坐标 的旋转平台 3 D 打 印机 。其 3 D打印平台是 圆形 的, 在 打印时也不是像常见的基 3于 F D M技术 3 D打印机那样来 回移 动 ,而是 围着某个 中心点 来 回旋转 。这样其 3 D打印头和平 台的移动量都 比较小 , 却能够 打 印 比较 大 的 尺 寸 。机 器 外 形 尺 寸 一 般 也 仅 在 2 0 e a×3 r 2 c m× 3 5 c m( 长 ×宽 ×高 ) 以内, 但其能够打印的最大尺寸则高达 2 0 c m ( 直径 ) ×1 5 e m。凭借其更小的体积 、 独特的极坐标系统 , 以及实 惠的价格 , P o l a r 有望成 为在教育市场领先的 3 D打 印机 。 3 D打印机结构 革新 的关键因素在于以下几点 : 1 ) 能否破 除对于 3 D打印机外形结构难 以改变的 固有观念 。 3 D打印机不是简简单单 的由在二 维水墨打 印机的基础 上再加 个能在竖直方 向上位移的喷头所形成 的。它 的外形可 以更加 丰富 , 从 而 让 自身运 作 起 来 更 有 效 率 。 2 ) 能否运用其他 学科 领域 的研究成果对 3 D打印机的结构 进行调整 , 改 良甚至革新 。绝大多数学科领域都是相互关 联的 , 3 D打印作为一种 以数字模 型文件为基础 的快速成形技 术和数 学领域肯定存在着某种关联。能否找到这种关联并且最大化地 运用是至关重要 的 3 ) 能否从 3 D打印机结 构的本质人 手对 3 D打 印机 进行革 新 。现有 的 3 D打印机 的结构创新 , 都仅仅停 留在表层 , 例如对 于各项零件设备 的位置安放进行调整 ,对 于金属框架 的组合 加 固等等 。这些创新虽然使得 3 D打 印机的外形更 加简洁美观 , 结 构更加牢 固,但是从本质上看 , 3 D打印机 的运 动系统并 没有 发 生改变 。 笔 者 也 曾在 3 D打 印机 的结 构 方 面 进 行 过 探 索 和 尝 试 。 在 某一课题 中 , 为 了更加深入 的认识 3 D打 印机 的结 构组成 , 笔者 买 下了一台最常见 的 3 D打 印机( X Y Z型 3 D打印机 ) 组装所 需 的全部零件 , 对 它们进行一一组装和调试 , 制作出一台能够正常 工作的 3 D打 印机 。在对其改造的过程 中, 笔者逐渐认识到其结 构的复 杂性和完备性 ,几乎难 以再添加其他部件来改变它 的性 能。于是 , 笔者有了摒弃其 固有结构的想法。在对 国内一家技术 先进的 3 D打印机公司考察 的过程 中,笔者发 现了几台结构新 颖甚至很少在市面上 出现 的 3 D打 印机 ,但是 由于固件和控制 系统的问题 , 这些打印机难 以向市场推广。 经过对这些结构奇特 的3 D打印机的初步研究 ,笔者发现它们 的结 构和数学上 的坐 标系有着千丝万缕 的关系 。而这层关系 , 似乎很 好地契合 了 3 D 打 印机结构革新 的关键 因素 。 通过对坐标系 的运用拓展 ,可 以预测 出 3 D打印机 的结 构 有 以下发展趋势 : 1 ) 保 留几种现有 的且较为成熟 的 3 D打印机结构 。通 过例
3d中的坐标系的概念

3d中的坐标系的概念世界坐标系世界坐标系是⼀个特殊的坐标系,它建⽴了描述其它坐标系所需要的参考框架。
从另⼀⽅⾯说能够⽤世界坐标描述其它坐标系的位置,⽽不能⽤更⼤的、外部的坐标系来描述世界坐标系。
物体坐标系物体坐标系是和特定物品相关联的坐标系。
每个物体都有它独⽴的坐标系。
当物体移动和改变⽅向时,和该物体相关联的坐标系将随之移动或改变⽅向。
例如:我告诉您“向前⾛⼀步”,是在向你物体坐标系发指令。
我并不知道您会向哪个⽅向移动,⼀些⼈向北,⼀些⼈向南,等等。
“前”,“后”,“左”,“右”这样的概念只关物体坐标系中才有意义。
例如:“向左转”和“向东转”,“向左转”是物体坐标系中的概念,“向东转”则是世界坐标系中的。
物体坐标系中也可以向指定⽅向那样指定位置。
例如:“您车上的灭⽕器放在哪”,即使您在芝家哥,您也不能告诉我“在芝加哥”,我问的是“在你车⾥的哪”,换句话讲,我想让你描述在您汽车物体坐标系中灭⽕器的位置。
有时候物体坐标系也被称为模型坐标系。
因为模型顶点的坐标都是在模型坐标系中描述的。
有时候它也称作⾃⾝坐标系摄像机坐标系摄像机坐标系是与观察者密切相关的坐标系。
他可被看作是⼀种特殊的物体坐标系。
在这个物体坐标系中,摄像机在原点,x轴向右,z轴向前(朝屏幕),y轴向上。
关于摄像机上的典型问题是描述在屏幕中哪些物品要显⽰出来。
惯性坐标系惯性坐标系是为了简化世界坐标系到物品坐标系的转换⽽引⼊的概念(因为从物体坐标系转到世界坐标系只需要旋转,从惯性坐标系转到世界坐标系只需要平移)。
惯性意为在世界坐标系到物体坐标系的“半途”。
惯性坐标系的原点和物品坐标系的原点重合,但惯性坐标系的轴平⾏于世界坐标系的各轴。
光学坐标系和机械坐标系的关系

光学坐标系和机械坐标系的关系
光学坐标系和机械坐标系是两个不同的坐标系,它们在应用和特点上存在明显的差异。
光学坐标系主要用于机器视觉和光学测量领域。
它通常以图像采集系统的光学中心为原点,以特定的方向为轴向定义坐标。
这种坐标系主要用于描述图像中像素的位置,以及物体在空间中的位置和姿态。
在机器视觉中,光学坐标系用于确定图像中特征点的位置,以及通过这些特征点对物体进行定位和识别。
机械坐标系则主要用于描述物体的位置和运动,特别是在机械加工、装配和检测等领域。
机械坐标系的原点通常固定在机器或设备的一个特定位置,轴向也根据实际应用需要进行定义。
机械坐标系用于确定机器或设备上各部件的位置,以及控制其运动轨迹。
在某些应用中,光学坐标系和机械坐标系是相互关联的。
例如,在机器视觉定位系统中,光学坐标系用于识别物体并获取其位置信息,而机械坐标系用于控制机器或设备的运动,以实现精确的定位和加工。
此时,光学坐标系和机械坐标系之间的转换关系需要通过一定的标定和计算来确定,以确保系统定位的准确性和精度。
总的来说,光学坐标系和机械坐标系分别适用于不同的应用领域,但它们在某些情况下需要相互关联和转换。
这种关联和转换需要经过精确的标定和计算,以确保系统工作的准确性和可靠性。
3D打印机的机械结构设计

3D打印机的机械结构设计摘要:近年来,制造业为了不断提高自身产品的质量水平,大量应用3D打印机设备进行产品制造,这种设备的应用,使得一些结构复杂的零件加工效率和质量显著提升,也在一定程度上突破了传统工艺的局限性。
在3D打印机中,基于FDM工艺的3D打印机是一个重要的品类,但这类设备中,进口比例仍然较高,这就需要加强对其机械结构设计进行研究,推动其国产化进程,以解决技术依赖问题。
关键词:3D打印机;机械结构;设计引言自2008年起,桌面式3D打印机进入了飞速发展的阶段,这主要是因为reprap的开源技术得到了极大的推广应用,从而产生了多个制造桌面3D打印机的知名企业。
经过不断改进,在开源3D打印机的基础上逐渐出现了SLS、SLA、DLP、3DP等多种打印技术,对制造业的进步发展产生了重大意义。
而3D打印机的结构也出现了门架体系结构、双光轴结构、并联式结构等多种形式。
1基本结构的设计结合实际需要,本次设计中设计人员的基本思路如下:首先,基于直角坐标系的x轴和y轴,组成平面扫描运动框架;其次,在机构选用方面,x轴和y轴的导轨均采用丝杠机构,z轴光杆则采用丝杆机构;最后,整体工作台选择三回旋轴机构,该机构主要由伺服电机和转轴组成,作为3D打印机设备的驱动。
基于此设计可知,x、y、z3个方向的移动均通过丝杆加以控制,电机则为其各方向的移动提供动力。
其在实际加工部件的过程中,与普通打印机类似,均由系统控制工作台的3个自由度旋转相应角度,以实现预期的3D打印环节。
2工作原理3D打印机主要工作原理是通过电脑的切片软件将三维模型按照设置的层厚切成一层一层,再根据切片算法,把面化成线的填充,再转化为G代码。
3D打印机控制软件通过串口通信的方式,把数据传送到3D打印机的主控板,主控板上的固件主要由G代码解释器组成,G代码解释器把数据流解释为3个驱动喷头运动的步进电机和1个挤料电机的运动,通过A4988驱动步进电机的运动。
基于笛卡尔坐标系FDM型3D打印机的对比分析

术 为公 众所 熟知 。不 同技 术原 理 的 3D打 印机 中 ,基 于 FDM 原 机数学 原理 。根据 其 x、Y、z三轴 点坐 标 的数学 原 理划 分 ,可 分
理 的增 材 制 造技 术 由于其 环 境 友 好 、价 格 低 廉 、成 型 速度 相 对 为笛 卡 尔 坐标 系 架 构 、球 坐标 系架 构 、极 坐标 架构 等 机 械 结 构
关键 词 :FDM技 术 原理 ;笛卡 尔坐标 系;3D打 印机 ;点 坐标定位
Abstract:W ith the increasing application of 3D printing technology in various f ields,the mathematical pr inciple of point posi-
ciple as the research object.The advantages and disadvantages of XYZ,Core XY and DELTA 3D printers are compared and an-
alyzed,which provides the basis f or optimizing the mechanical structure of the equipment,and finally draws the conclusion.
tioning for ̄rming equipment is becoming more and more important.This paper explores the shaping pr inciple of FDM technology
type 3D printers,and selects the 3D printer,which is the mainstream of the Descartes coordinate system and mathematical prin-
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浅谈坐标系与3D打印机结构革新的关系
作者:陈驰
来源:《科技风》2017年第08期
摘要:3D打印机至问世以来,其结构经历过两次很大的革新。
从以直角坐标系(笛卡尔坐标系)为基础研发出的XYZ型3D打印机到以球坐标系为基础研发出的三角洲3D打印机,坐标系应用的拓展带动了3D打印机结构技术的发展。
本文试图从3D打印机结构模式固定的现状入手,结合不同种类的坐标系对国内外现有的3D打印机结组成加以分析,阐述了在3D 打印机结构的革新中,坐标系的运用将发挥重要作用。
并探索驱动3D打印机结构革新的关键因素,进而对未来3D打印机结构的发展趋势作出预测。
关键词:坐标系;3D打印机;3D打印机结构;革新
3D打印机技术起源于20世纪末的美国,至今已有近30年的发展历史。
如今3D打印机虽然种类繁多,但其结构组成却大同小异,主要由以下几个结构系统组成:材料挤出系统、运动系统、控制系统以及其他部件。
材料挤出系统由3D打印喷头、材料挤出机等构成,决定3D打印产品的材质特性和精度。
运动系统由以坐标系为基础制作的金属框架构成,作为平台让挤出机或者喷头得以运动,直接决定3D打印机打印速度和打印方式。
控制系统由3D打印控制主板以及驱动模块等构成,负责向3D打印机输送指令,控制挤出机的运动轨迹从而将三维模型打印成3D实物,间接决定3D打印机的打印速度。
其他部件由打印平台,供料装置等构成。
由此可见3D打印机的各个结构系统是相互依赖,密不可分的,任何一个结构系统的改变都将引起其他结构系统的变动。
其中,运动系统决定了3D打印机外观,也是最难改变的部分。
一旦运动系统发生改变,配套的控制系统就随之相应进行改变,而材料挤出装置的运动轨迹也将发生改变。
通过检索中国知网期刊论文全文数据库,以“3D打印机结构”为主题词进行检索,共找到236篇文献,所研究的3D打印机结构可大致分为两类,一类是采用XYZ结构的3D打印机,这也是市面上最为普及的3D打印机种类;另一类是采用三臂并联结构的3D打印机,俗称“三角洲”,是近几年新兴产生的3D打印机。
这两种结构在外观上虽然有很大的差异,但是从其设计的原理看,都是用数学坐标系的原理开发出的。
XYZ结构的3D打印机,外观通常是长方体框架,顾名思义,是以笛卡尔坐标系(也就是空间直角坐标系)为原理研发出的。
打印平台沿着某一个轴向移动,挤出装置则沿着另一个坐标平面移动。
由于两者相互独立,打印物体在热床平台上最多只有一个轴向上的移动,因此基本不用担心物体在打印过程中发生位移。
而挤出装置是沿着由两个轴向组成的坐标平面移动,减轻喷头的重量就可以提高打印速度和打印精度。
XYZ轴本身架构出来的较大空间可以很好的将电源和电线隐藏起来,使得整体
更加美观。
但是三个轴向上具有近乎相同的移动长度,使得打印机整体在各个方向上都略显巨大。
三角洲型的3D打印机,在三棱柱外观下有一个类似三角爪型的挤出装置,表面上看是以球坐标系为基础,实际上其数学原理还是笛卡尔坐标系,只是通过三角函数将XY坐标映射到三条垂直的轴上去。
通过将挤出装置并联在三根竖立的轴上,控制三根轴上并联装置的高度,从而调整悬在半空中的挤出装置的空间位置,打印出物体。
同样的调整挤出装置的重量可以很好的提高挤出头的灵活度,进而提高打印速度和打印精度。
这种结构的机械复杂程度要比直角坐标系结构简单,但是固件就复杂多了。
这也印证了打印机运动系统将很大程度地影响控制系统。
同时由于挤出装置可以更灵活地在三维空间而不是平面上进行移动,此类打印机的打印平台的面积(XY轴方向上的体积)将大大减小。
但是因为要容纳三角爪的长度,打印机Z轴方向的体积也较大。
通常为了打印高度为20CM的物体,打印机整体高度要达到40-50CM。
以上两类3D打印机是3D打印技术诞生至今最为成熟的,而其新颖的打印结构都可以归功于对数学坐标系原理的运用。
在众多坐标系中,除了笛卡尔坐标系(空间直角坐标系)和球坐标系外,还有极坐标系、柱坐标系等。
通过对这些坐标系的运用拓展,我们可以进一步研究驱动3D打印机结构革新的因素。
近期来自俄亥俄州的Polar 3D公司在CES展会上展示出了一款新型结构的3D打印机,一种基于极坐标的旋转平台3D打印机。
其3D打印平台是圆形的,在打印时也不是像常见的基3于FDM技术3D打印机那样来回移动,而是围着某个中心点来回旋转。
这样其3D打印头和平台的移动量都比较小,却能够打印比较大的尺寸。
机器外形尺寸一般也仅在20cm×32cm×35cm (长×宽×高)以内,但其能够打印的最大尺寸则高达20cm(直径)×15cm。
凭借其更小的体积、独特的极坐标系统,以及实惠的价格,Polar有望成为在教育市场领先的3D打印机。
3D打印机结构革新的关键因素在于以下几点:
1)能否破除对于3D打印机外形结构难以改变的固有观念。
3D打印机不是简简单单的由在二维水墨打印机的基础上再加一个能在竖直方向上位移的喷头所形成的。
它的外形可以更加丰富,从而让自身运作起来更有效率。
2)能否运用其他学科领域的研究成果对3D打印机的结构进行调整,改良甚至革新。
绝大多数学科领域都是相互关联的,3D打印作为一种以数字模型文件为基础的快速成形技术和数学领域肯定存在着某种关联。
能否找到这种关联并且最大化地运用是至关重要的
3)能否从3D打印机结构的本质入手对3D打印机进行革新。
现有的3D打印机的结构创新,都仅仅停留在表层,例如对于各项零件设备的位置安放进行调整,对于金属框架的组合加固等等。
这些创新虽然使得3D打印机的外形更加简洁美观,结构更加牢固,但是从本质上看,3D打印机的运动系统并没有发生改变。
笔者也曾在3D打印机的结构方面进行过探索和尝试。
在某一课题中,为了更加深入的认识3D打印机的结构组成,笔者买下了一台最常见的3D打印机(XYZ型3D打印机)组装所需的全部零件,对它们进行一一组装和调试,制作出一台能够正常工作的3D打印机。
在对其改造的过程中,笔者逐渐认识到其结构的复杂性和完备性,几乎难以再添加其他部件来改变它的性能。
于是,笔者有了摒弃其固有结构的想法。
在对国内一家技术先进的3D打印机公司考察的过程中,笔者发现了几台结构新颖甚至很少在市面上出现的3D打印机,但是由于固件和控制系统的问题,这些打印机难以向市场推广。
经过对这些结构奇特的3D打印机的初步研究,笔者发现它们的结构和数学上的坐标系有着千丝万缕的关系。
而这层关系,似乎很好地契合了3D打印机结构革新的关键因素。
通过对坐标系的运用拓展,可以预测出3D打印机的结构有以下发展趋势:
1)保留几种现有的且较为成熟的3D打印机结构。
通过例如减轻3D打印机框架的重量、缩小3D打印机的体积等尝试,使其获得更加稳定的结构和更加便携的特殊性能。
2)另起炉灶,研发出全新的3D打印机结构。
通过对于数学坐标系的深入认识,进行运用和拓展,实现技术上的跨领域互通,产生例如柱坐标3D打印机等全新结构的3D打印机。
任何行业都是不断推陈出新的,3D打印行业也是一样。
对于软件固件上的研究开发以及打印材料上的创新固然重要,但是更加丰富的3D打印机结构,不仅可以让市场的产品更加多样化,也将推动3D打印相关技术的革新。
对坐标系原理应用于3D打印机的开发研究将在很大程度上打破原有结构类型的3D打印机的思维禁锢,进而引起3D打印机结构、外观乃至技术的革新。
参考文献:
[1] 杨春梅,杨继全,施建平.3D打印成型工艺及技术[M].南京:南京师范大学出版社,2016.
[2] 利普森(美),库曼(美).3D打印从理想到现实[M].北京:中信出版社,2013
[3] 刘欣灵.3D打印机及其工作原理[J].网络与信息,2012年2期.
[4] 崔万瑞,李愈馨,李福坤,于航,姜合萍.3D打印机体系结构研究[J].计算机光盘软件与应用,2014年8期.
[5] 牛晰.桌面3D打印机结构分析及机体设计研究[J].设计,2015年2期.
[6] 阴贺生,赵文豪,宋杰,徐承凯,赵佳峰.基于三臂并联结构的桌面3D打印机[J].机械,2015年2期.
[7] 王瑞玲.3D打印机设计的初步分析[J].电子制作,2013年11期.
[8] 邵翌鑫.家用3D打印机设计方向[J].吉林化工学院学报,2016年11期.
[9] 个头小、打印尺寸大的极坐标3D打印机Polar [OL].中国3D打印机网,2015.
项目名称:基于FDM技术桌面级3D打印机的研究、设计与制作(项目编号:2016SCX011),此论文受全国大学生创新创业训练计划项目经费支持。