履带轮转换技术设计研究
履带式挖掘机结构及原理

34
挖掘机械研究所
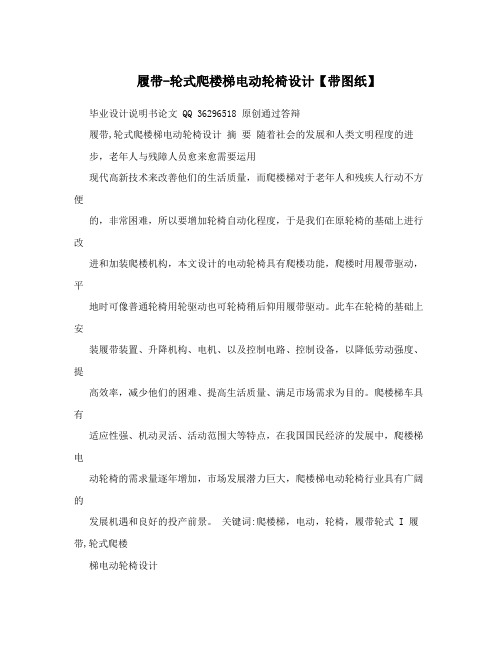
5.5.3、阀
35
挖掘机械研究所
P2
P1
右行走
直线行走
可选
左行走
铲斗
回转
动臂1
动臂2
斗杆2
斗杆1
36
挖掘机械研究所
1 2 3 4 5 6 7 8
16
挖掘机械研究所
C、回转支承漏黄油 原因:润滑脂、内外圈间隙太大、防尘圈太松 润滑脂:粘度低-泄露,要求3号锂基脂 内外圈间隙太大:(工作时上车晃动较大-可视测)-漏油-更换回转支承 防尘圈(橡胶圈)太松:橡胶老化、断裂或装配间隙太大-更换
17
挖掘机械研究所
D、支重轮漏油
原因:浮封环制品不良、泥沙或冰水使浮封环固结、O型圈老化 黄油嘴装配 检查:若发现O型圈严重磨损-使用中进入水、泥沙等经冻结或挤压 -O型圈与浮封环发生相对转动O型圈磨损-指导用户在湿地工况作业完后在 硬路面上行走,几分钟以将内部水分泥砂从壳体间隙处抖出(或空转)-更换支重轮 黄油嘴装配:生药带或打胶重新装配
46
挖掘机械研究所
- 先导油路
Px 压力 ↑
- 主油路
- 斗杆合流,流量增大,速度加快
ARM DUMP
47
挖掘机械研究所
斗杆回收 - 先导压力
Px 压力 ↑, 保持阀打开 流量再生
X架拼焊结构—9T、15T、22T、33T
分体式结构—45T
14
挖掘机械研究所
5.1.4 典型故障
A、回转异响
原因:回转马达、回转减速机、回转支承 检查步骤:
履带-轮式爬楼梯电动轮椅设计【带图纸】
履带-轮式爬楼梯电动轮椅设计【带图纸】毕业设计说明书论文 QQ 36296518 原创通过答辩履带,轮式爬楼梯电动轮椅设计摘要随着社会的发展和人类文明程度的进步,老年人与残障人员愈来愈需要运用现代高新技术来改善他们的生活质量,而爬楼梯对于老年人和残疾人行动不方便的,非常困难,所以要增加轮椅自动化程度,于是我们在原轮椅的基础上进行改进和加装爬楼机构,本文设计的电动轮椅具有爬楼功能,爬楼时用履带驱动,平地时可像普通轮椅用轮驱动也可轮椅稍后仰用履带驱动。
此车在轮椅的基础上安装履带装置、升降机构、电机、以及控制电路、控制设备,以降低劳动强度、提高效率,减少他们的困难、提高生活质量、满足市场需求为目的。
爬楼梯车具有适应性强、机动灵活、活动范围大等特点,在我国国民经济的发展中,爬楼梯电动轮椅的需求量逐年增加,市场发展潜力巨大,爬楼梯电动轮椅行业具有广阔的发展机遇和良好的投产前景。
关键词:爬楼梯,电动,轮椅,履带轮式 I 履带,轮式爬楼梯电动轮椅设计Abstract With the social development and improvement in the level of human civilization,oldmen and physically disabled members of society more and more need to usemodern high-tech to improve their quality of life,but the elderlyand handicapped areunable to climb the stairs, so we had to increase the automaticlevel of the electricwheelchair to reduce their difficulty. So we have the original onthe basis o f awheelchair to improve and the installatio n of Climbing stairs institutions, the paperdesign with the electric wheelchair has Climbing stairs function, when Climbing stairsit use track-driven, the ground can be used like an ordinary wheelchair-wheel-drivecan also be track-driven, when the chair be tilted.we have fit inthe new equipmentsinclude the tracked device,the body movements, the electromotor, control circuit andcontrol equipment, etc, to reduce the labor intensity and difficulty, and to improve theefficiency and living quantity, so that can satisfy the requirements of the market. Theautomatic electric wheelchair has new characteristics of high adaptability, mobilityand orbit, etc. As the development of the national economy, the requirement ofautomatic electric wheelchair will be increased year by year. So the developingpotential of the automatic electric wheelchair in the market is vast, it has a gooddeveloping opportunity and well invested prospect. Keywords:Climbing thestairs,electricity, wheelchair, Track-Wheel 履带,轮式爬楼梯电动轮椅设计目录第一章综述.................................................................. .. (1)1.1 爬楼梯轮椅的意义 (1)1.2 国内外爬楼梯轮椅的发展状况 ....................................21.2.1 国外爬楼梯轮椅的发展状况 (2)1.2.2 国内爬楼梯轮椅的发展状况 (4)1.3 本项目的设计目的与主要研究内容 ................................51.3.1 课程设计目的 (5)1.3.2 课题研究内容 (6)1.4 设计进程安排 ..................................................6第二章履带爬楼装置机械系统结构设计 (8)2.1 爬楼机构的比较 ................................................82.2 设计思路 ......................................................9......................................... 10 2.3 履带轮式轮椅爬楼原理2.4 履带爬楼过程分析 .............................................112.5 爬楼性能参数 .................................................132.6 履带爬楼机构的结构设计 .......................................132.7 升降机构的设计 (16)2.8 本章小结 (18)第三章电气系统设计 ................................................................. ............ (19)3.1 履带爬楼梯装置执行电机选择 (19)3.2 电池选择 (20)3.3 电动车电机转速控制 (21)3.3.1 驱动方式对电动车性能影响 (21)3.3.2 现有电动车电机存在主要问题及探索 ...........................213.4 直流电机机械特性 (22)3.5 控制系统的设计 (23)3.6 本章小结 (28)第四章典型零部件设计及校核计算 (29)4.1 传动系统动力参数计算 (29)4.2 轴的计算 (30)III 履带,轮式爬楼梯电动轮椅设计第五章技术经济分析报告 ................................................................. . (39)5.1 履带轮式轮椅技术分析 (39)5.2 履带轮式轮椅经济分析 (39)5.3 履带轮式轮椅结论和展望 (40)参考文献 ................................................................. (41)致谢 ................................................................. ............................................ 42 IV 履带,轮式爬楼梯电动轮椅设计第一章综述 1.1 爬楼梯轮椅的意义轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,随着无障碍设施的增多,轮椅使用者的活动范围逐步加大,但楼梯却使轮椅受到很大限制,因此研发价格低廉、简单易用的爬楼梯轮椅是康复工程工作者面临的一项比较紧迫的任务。
大连理工大学机械工程学院导师信息

传感测控与精密加工技术研究所简介现有教员13名,其中,教授2名,副教授5名,高级工程师2名,讲师2名,工程师1名,高级技工1名。
主要研究方向:传感器与执行器理论与技术;智能化仪器仪表与智能监控技术;航空航天发动机推力测量;微型柔性构件的拓扑优化;精密加工技术及精密测量;硬脆材料加工与工具技术;现代切削理论与切削过程测控;难加工材料切削性能与加工技术;液压系统CAD/CAM、动态特性仿真与优化;网络测控技王殿龙:传感测试理论与技术、难加工材料切削加工、工程机械数字化样机技术。
张元良:1.天然金刚石超精密切削、2.智能化仪器仪表、3.学生体质自动测量仪表、4.起重机力矩限制器、5.液压比例阀数字化控制技术与模块化研究、6.在线测量技术及应用。
徐志祥:模式识别与智能系统方向,1. 数控与伺服控制技术、2. 非线性时间序列分析、3. 机器视觉与模式识别、4. 虚拟仪器及测试技术。
张军:1.传感器及执行器理论研究、2.压电石英、压电陶瓷机理研究、3.压电切削测试系统研究、4.精密仪器设计与制造。
张宏:液压系统仿真与优化、流体传动与控制。
桑勇:电液伺服控制;机电传动控制;先进仪器设备研发。
工程机械研究所简介研究所非常重视与生产企业的合作以及研究成果的转化,成功联合开发了数十个具有自主知识产权的产品,仅2006年就完成了9项填补国内空白的项目,其中以履带起重机为代表的系列产品一举打破了国外企业对大吨位产品的垄断,为国家节省了大量外汇,为企业创造了可观的经济效益。
据统计,研究所近年来向企业转移的技术成果达60余项,累计实现销售总额40多亿元,获得各类奖励十余项。
研究所还先后负责或参与了国家863、973、自然基金等专项的科学研究工作,在国内外公开刊物上发表了多篇学术研究论文。
王欣:1.工程机械产品关键理论与技术研究、2.结构优化与动态设计、3.结构损伤、识别与寿命评估、4.虚拟设计与仿真。
曹旭阳:工程机械三维仿真及虚拟样机技术、结构相似性研究、机械机构优化设计,岸边集装箱起重机数字化虚拟样机,结构优化设计。
履带轮转换技术的应用现状与发展趋势

履 带式 和轮式 运输 车 辆 的应用 范 围 ,提 高 了对 各 种复 杂 地 形 的通 过能 力, 震动 小 、噪 音低 、乘 坐舒 适 。 目前 , 且 国外 已经 大范 围应 用在 军 用车 辆 、农 用作 业机 械 和起重 运 输机械 中 ,国 内一些 厂商 也 已经开 始对 可更 换履 带 轮
S a u n v l p n n e c fT a k d W h e n e so c n l g t t s a d De e o i g Te d n y o r c e e l Co v r i n Te h o o y
Y ANG L - o , WANG S e g J n ,WANG Y u J n i Ha ‘ h n - u  ̄ o—u
sok lw go n i rs r, i e i e b ed qi l c a gal. t. l l a l s e t v r f r t y e acrig h c ,o ru d gpe ue hg fxb ,d s e , uc y hn e e e As d吖 r c sf di o s e l iee p s cod n s h l l 【 p h g k b c o e ai n e ad i nt n
摘
要 :介 绍 了可 更 换 三 角 履 带 轮 的 结 构 组 成 、 分 析 了其 使 用 特 , 。主 要 包 括 轻 便 、低 震 动 、 低 接 地 比 压 、 最
高通 过性 、高行 驶速 度 、可 快速 更换 等 。对 可更换 三 角履 带轮 按 照不 同标 准进 行 了系统 的分 类 . 分析 了可 更换三 角履 带轮 的应 用现 状 、发展前 景 ,提 出了其 未来的研 究发 展趋 势 。 关键 词 :可更换 ;履 带轮 ;分类 ;现 状 ;趋 势 中图分类 号 :T 3 H1 文献标 识码 :A d i 03 6 0. s.0 2 6 7 . 1 . .3 o: . 9 i n10 — 6 32 1 20 0 1 9 s 0 0
小型电动履带底盘系统设计与试验

小型电动履带底盘系统设计与试验孙欣欣(常州汉森机械股份有限公司,江苏常州 213034)摘要:小型自走式履带底盘可用于作业空间狭窄等拖拉机无法进入的作业空间进行作业,可作为如大棚、果园、茶园等除草、采摘、植保及搬运等工作用机械的底盘,作业种类繁多,对作业机械的动力要求更多是能绿色环保。
针对现有燃油动力底盘在动力方面无法满足绿色环保作业要求的问题,对小型履带式底盘进行了动力系统的匹配设计、对传动系统结构进行理论分析,并按分析结果研制样机,对样机进行了动力系试验。
结果表明:底盘最高行驶速度平均值为6.5 km/h,两种爬坡工况底盘行驶速度为0.45 km/h和2.75 km/h,续航里程约20 km,可以满足多种作业工况的要求。
关键词:小型电动履带底盘;系统设计;试验0 引言茶园、果园作业环境空间狭窄、作业种类繁多,对机械动力要求希望绿色环保。
因此,发展小型、环保、高效、电动动力底盘是提升机械化作业水平的关键。
近年来,电动技术快速发展,电动底盘以其灵活、环保等特点在茶园、果园得到大量应用。
针对此情况,笔者在现有的履带式动力底盘基础上,对电动动力系统进行匹配设计,对传动系统及结构进行理论分析,设计了一种小型电动自走式履带底盘,该底盘主要可以满足动力环保、作业空间狭窄等拖拉机无法进入的果园、茶园作业的动力和续航方面的需求。
1 动力底盘总体结构与工作原理果园种植环境有丘陵地形和平原地形,本文研究最大坡度不超过20%地形作业用机器,主要适应除草、采摘、植保及搬运等作业,确定底盘最高行驶速度为6.5 km/h、最低行驶速度为1.5 km/h、最大载重质量为300 kg、自重120 kg,续航里程为30 km,以满足各种复杂工况需求。
1.1 底盘结构电动履带式底盘主要由车架、驱动电机、电池、变速机、控制系统、左侧履带和右侧履带组成,如图1所示。
作业底盘的动力系统安装于作业底盘行走装置的前部位置,上方安装用于茶园、果园作业的各种农机具。
一种履带拖拉机自动导航转向控制方法
一种履带拖拉机自动导航转向控制方法付拓;毛文华;张小超;贾全;王丽丽【摘要】针对由于转向机制不同导致的自动导航系统无法在轮式与履带式拖拉机上通用的问题,提出了一种基于履带转速与虚拟驱动速度和虚拟转向角转换模型的控制方法.通过对轮式车辆中性转向二轮模型和履带车辆转向模型的分析,推导出履带车辆两侧履带卷绕速度与虚拟转向角和虚拟驱动速度的表达式,为自动导航驾驶系统构建完整的反馈控制.进行实车转向试验,采集数据,对提出的转换模型进行验证.结果显示,该转换模型下理论值与实际参考值具有很好的对应关系,该转向控制方法可行.【期刊名称】《农业工程》【年(卷),期】2018(008)001【总页数】5页(P84-88)【关键词】履带车辆;转向运动学模型;虚拟转向角;虚拟驱动速度【作者】付拓;毛文华;张小超;贾全;王丽丽【作者单位】中国农业机械化科学研究院,北京100083;中国农业机械化科学研究院,北京100083;中国农业机械化科学研究院,北京100083;中国农业机械化科学研究院,北京100083;中国农业机械化科学研究院,北京100083【正文语种】中文【中图分类】S219.20 引言近年,伴随着传感技术、导航技术和智能控制技术的提高,无人驾驶技术在农业生产中得到应用,导航方式主要有视觉导航、信标导航和卫星导航(全球定位系统)等实现方式。
视觉导航根据CCD摄像机对周围环境实时探测所获取的信息,规划出所需路径,并能够沿着该路径在没有人工干预的情况下,移动到预定目标。
该导航技术对于作业环境的适应性易受天气影响,如在雨天或大雾天气,视觉导航的效果会降低;信标导航通过在工作环境内的若干位置处分别放置信标。
车辆通过安装在机体上的测量装置,测知车辆与各个信标之间的位置关系,推算出自身的位置与姿态。
这种导航方式存在信标安放位置、数量等众多影响因素,对于产品化推广有一定程度的困难[1-4];而基于全球定位系统的卫星导航具有精度高、用户容量无限制和全天候工作等特点,对作业场地、气候和天气等条件都有很好的适应性,适合在大型农作区,露天作业应用。
棚室电动履带式旋耕起垄一体作业机的设计研究

第43卷第6期2020年11月河北农业大学学报JOURNAL OF HEBEI AGRICULTURAL UNIVERSITY Vol.43 No.6Nov.2020棚室电动履带式旋耕起垄一体作业机的设计研究王海楠,弋景刚(河北农业大学 机电工程学院,河北 保定 071001)摘要: 我国棚室等设施农业发展迅速,棚室电动履带式旋耕起垄一体作业机1次作业能够完成旋耕、起垄、覆膜3道工序,使用清洁能源,具有无污染、噪音小等优点。
依据棚室作业环境特点,对履带式底盘进行参数计算和分析;使用离散元方法对起垄成型部件进行仿真优化设计,确定了起垄成型部件距离旋耕刀辊轴距离为600 mm ,拨土转板的水平位置距离旋耕刀辊轴550 mm ,竖直方向上距离地面425 mm 处,并通过计算得出拨土转板的转速为270 r/min 即满足设计要求。
关 键 词: 棚室;旋耕;起垄;离散元;仿真中图分类号: S 222.3 开放科学(资源服务)标识码(OSID):文献标志码:ADesign and research of a shed electric tracked rotary cultivation andintegral working machineWANG Hainan, YI Jinggang(School of Mechanical and Electrical Engineering, Hebei Agricultural University, Baoding 071001, China )Abstract: China's sheds and other facilities have developed rapidly, but the annual continuous high-intensity and high-intensive production methods have caused many problems. The use of wide-row mulch double-row planting cultivation methods for shed tomatoes has an obvious yield increase effect. The electric crawler rotary ridge and ridge integrated operation machine in the shed can complete three processes of rotary cultivating, ridge and mulching in one operation. It uses clean energy and has the advantages of no pollution and low noise. According to the characteristics of the working environment of the shed, the parameters of the crawler chassis were calculated and analyzed; the discrete element method was used to simulate and optimize the ridge forming part, and the distance between the ridge forming part and the rotary blade roller axis was determined to be 600 mm. The horizontal position of the plate was 550 mm from the rotary blade roller shaft and 425 mm from the ground in the vertical direction. The calculated rotation speed of the shovel blade was 270 r / min, which met the design requirements.Keywords: shed; rotary tillage; ridge; discrete element; simulation文章编号:1000-1573(2020)06-0116-10DOI :10.13320/ki.jauh.2020.0121收稿日期:2020-04-04基金项目:河北省重大科技成果转化专项(17047203Z ).第一作者:王海楠(1993-),男,河北唐山人,硕士研究生,主要从事农业机械装备研究.E-mail:*****************通信作者:弋景刚(1961-),男,河北盐山人,教授,主要从事智能化农业装备与制造技术研究.E-mail:*************.cn 本刊网址:http: // hauxb. hebau. edu. cn: 8080 /CN/ volumn / home. shtml我国温室大棚等大型设施占世界设施农业生产面积的85%以上[1]。
基于履带轮行走机构的车辆行驶效率分析

L=k
图 3 履带轮行走机构行驶效率曲线 履带轮行走机构行驶效率高于传统履带车辆的行驶效率, 履带轮行走机构轮式状态下行驶效率高于履带状态下的行驶 效率。
= Pf 2 6= BL 6 Bk
设所采用橡胶履带支撑区段长度为 L0,且支撑面上接地 比压 p 均布,设整机重量为 G,因 p = kZ nn +1,所以有:
1 履带轮原理及构成
履带轮是一种可以实现轮式行走向履带式行走、履带行 走向轮式行走转换的机构,可以根据所搭载平台的行驶需要 进行转换。借鉴履带行动系统和轮胎行动系统的机构和原理, 完成了履带轮的设计。 履带轮行走机构由驱动制动总成、橡胶履带、保持架、 执行器、负重轮、张紧轮组、诱导轮等部件组成。整体的结 构构成如图 1 所示。轮履状态变化通过保持架变形实现 [2]。
= Pf
Mf f = G rK rK
(6)
当行动系统行进时,履带前方岩土的反作用力 Rn,可分 解为垂直和平行地面的分力 Zn 和 Pf 2。可以认为 Pf 2 所引起的 功率损失就是使岩土在垂直方向产生参与变形所消耗的功率。 则履带支撑区压缩单位面积岩土所消耗功为:
n +1 Zn (7) n +1 行动系统中 6 个履带轮行走单元消耗的功为 6BSL,这部 分的功表示即为:
2017 年 11 月下
内部滚动阻力主要来源为:由履带张紧力 T0 引起的滚动 阻力 Pf 0,负重轮在橡胶履带上滚动的滚动阻力矩所引起的滚 动阻力 Pf 。每当有一块芯金被卷上驱动轮,橡胶履带驱动轮 消耗的摩擦功为: 式中: T0 为履带张紧力。 整个履带轮系统总共有 6 个履带轮行驶单元构成,因此 所有履带上由张紧力引起的滚动阻力为:
带轮轮式状态下的效率 [3]。 对于传统履带车辆,履带行驶系统的效率可由 A.D.克 留可夫经验公式求得。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一 _
至失败。
ቤተ መጻሕፍቲ ባይዱ i
式承 载量 量较 小 ,但是 结构 简单 .主 要用 在轻 型 和 中型
的 履 带 轮 中 。 中 间 支 撑 式 具 有 承 载 量 大 ,结 构 复 杂 的 特
点 ,主要用 在重 型履 带轮 中 。
( ) 撑 轮 系 的设 计 。 撑 轮 系 的 设 计 要 充 分 考 虑 支 4支 支 撑 轮 的 承 载 重 量 ,以 及 支 撑 轮 的 半 径 等 因 素 ,可 有 效 解
o h k tc noo y u rsa antt u n o e e hn lg n h ub e ae ia a d t c noo ,o an h i ee ttc n clf r fs oc e h lg ,g a d g is he t v rt c oo r y a d t e r b rc tr l rb n e h lg p l y bti ste df rn e h ia o m i h rc h e ein a p c to n t e tak w e ld sg p h ain.S mm a z d i heta k w h e ai ssse ein t rm ay c r l-o a tr r po e e kn u i r e n t rc e lv r ou ytm d sg hep i r oreain fco ,p o sd on id :
生的一 项新 技术 .可 直接 替换 轮式 车辆 的轮胎 .从 而增
大 轮 式 车 辆 的 接 地 面 积 ,减 少 接 地 比压 ,使 轮 式 车 辆 满
足在 冰雪 、泥泞 、沼 泽 、沙地 等松 软场 地条 件 下 的行驶 与作业 需求 。虽 然履 带轮 技术 已经 广 泛应 用 ,但 仍 存在 承载 能 力小 ,作 业安 全 性 、舒 适性 不 高 ,技 术 通用 性差
收 稿 日期 :2 2 0 — 6 01 — 6 0
图 1 可 更换履 带轮
国 外 对 可 更 换 履 带 轮 的 研 究 主 要 以 轻 型 、 中 型 为 主 。客户 根 据 车辆 的载 重及 作 业地 域 的 实 际选 择 产 品 。
目前 已 在全 球 5 0多 个 国家 热 销 。 国外 主要 产 品 的相 关
参 数如 表 1 示 。 所
作 者 简 介 :潘 晓春 (9 7 ,女 ,浙 江 义 乌人 ,硕 士 研 究生 , 1 6 -)
高级 工 程 师 ;姚 凯 (9 5 , 男 ,安 徽 淮北 人 ,硕 士 ,助 理 1 8 一)
工 程 师 。 主 要 研 究 方 向 :机 械 设 计 。
o e r b r c t r i a n e i op s 1 fn w be a e l rba d d s u p l n g pr o a.
Ke r s u b rta k c v rin; a piain; sr cu e c m p sto y wo d :r be rc on eso  ̄ l to p c t tr o u o i n; d sg ee rh i ein r sac
第2 5卷 第 4期
21 0 2年 7月
D v lp mn & I n v t no c ie y& E e t c lPo u t e eo n t n o ai f o Ma h n r lcr a rd cs i
机 电 产 品 开崖 与4 新 ・ j
Vo1 5, 4 . No. 2
命 ,仍 是橡 胶履
可 更 换 履 带 轮 设 ; 来 防 止 车 辆 在 用 带 轮 绕 驱 动 轴 整
片上 。抗 拉 链 片采用 相应 金属 材 料 ,满 足履 带最 大 牵 引 力 要求 。履 带 金属传 动 承载 件 ( 齿 )的 结构 改进设 计 铁
是 在 保 证 其 抗 弯 、耐 磨 、 抗 剪 切 和 横 向 支 撑 能 力 的前 提
减震技 术 ,防翻 转技 术和橡 胶履 带技 术 ,得 出不 同技 术形 式在履 带轮 设计 中的应 用 总 结 了履 带轮 各 系统设 计 中主 要相 关 因素 ,提 出了一种 新型橡 胶履 带 的设计 方案 。
关 键 词 : 履 带 轮 ;应 用 ;技 术 形 式 ;设 计 研 究 中 图 分 类 号 :T 2 文 献 标 识 码 :A d i 03 6 /.s . 0 — 6 32 1.40 2 H4 o: .9 9 isn1 2 6 7 .0 20 .1 1 i 0
.
Ab t a t sr c :Th ril a nay e her b rta k c n ri n tc noo y d veo m e tprsnts u t n n i p l a o e atceh sa l z d t u be r c o veso e h lg e lp n e e i ai a d te a pi t n,sm ma z d t t o l ci u i r e he ta k whe lt e s p osd t h r n t e tn we ,t x n d a p c to c p ,e ha e hev rait rc e o b u p e o s ape he b a g po r he e pa de p h a n so e n nc st e sti i i ly,c mf ra lnesa d t o o tb e s n he
0 引 言
履 带 轮 转 换 技 术 是 为 扩 大 轮 式 车 辆 的 应 用 范 围 而 产
越 野 汽 车 、工 程 机 械 等 ,让 普 通 机 动 车 获 得 真 正 的 全 地
域行 驶 能力 。可 更换 履带 轮 与普通 车轮 胎相 比具有 附着
性 能 好 、 牵 引 力 大 、稳 定 性 好 等 优 点 。 白 1 9 9 4年 开 始 在 市 场 上 销 售 以 来 ,十 几 年 间 .可 更 换 履 带 单 元 已 经 设 计 并 生 产 出 轻 型 、中 型 、 重 型 三 种 类 型 , 3 0多 种 规 格 型 号 ,如 图 1 示 所
下 ,对 其 结 构进 行优 化 设 计 .提 高 铁 齿 与 橡 胶 的附 着 性 ,使其 重量 轻 、附着性 好 、工 艺 简单 、成 本低 。 由于 履带 所 受牵 引力 主要 作用 在抗 拉链 片上 ,因此 履 带 内部 的抗 拉 体所 受牵 引 较小 ,从 而 可取 消履带 内 部 抗拉体 ,优 化 履带 了 的结构 。取 消 了履带 内部 使用 的 铁 丝或者 凯夫 拉纤 维 材料 等抗 拉体 ,解 决 了因抗 拉体 接
轻 型 和 中型 履 带轮 应 用 范 围较 广 ,技 术相 对 成 熟 , 使用 寿 命 可 达 5 0 k 0 0 m,最 高 车 速 可 达 6 k / 5 m h;承 载 能
力 应 用 在 整 装 质 量 在 1t以 下 的 载 重 工 程 车 辆 上 。 重 型 0
3 3
・
产 品 与市 场 ・
De i n Re e c n he Rub r Tr c nv r i sg s ar h o t be a k Co e son
PAN Xio o —Ch n, YA0 / u Ka
( nt cinE gn eigReerhIstt fGe ea L gsc prme tXi nS an i 1 02,Chn ) Co s u t n ier sac ntueo n rl o t s r o n i i i De at n, h ax 7 0 3 a ia
Juy. 01 l, 2 2
文 章 编 号 :1 0 — 6 3 ( 0 2 4 0 3 0 0 2 6 7 2 1 )0 — 3 — 3
履 带 轮 转 换 技 术设 计 研 究
潘 晓春 . 姚
凯
( 后 建 筑 工 程研 究 所 , 陕 西 两 安 7 0 3 ) 总 102
决 履 带轮在 运行 过程 中的震 动 。 在 履 带 轮 的 设 计 过 程 中 .还 应 严 格 控 制 履 带 轮 的 总 体 重 量 , 在 履 带 、支 撑 轮 系 的 设 计 中 有 效 减 少 履 带 轮 在 运 行 过 程 中 的 震 动 问 题 。也 可 以 设 计 专 门 的 减 震 机 构 。
带 轮 的 操 纵 舒 适 性 和 安 全 性 。 分 析 了 履 带 轮 的 基 本 组 成 和 基 架 支 撑 形 式 ,驱 动 形 式 ,减 震 技 术 ,防 翻 转 技 术 和 橡 胶 履 带技 术 ,不 同技 术形 式 在 履带 轮 设计 中 的应 用 。
个 方 面 :① 轻 型
l 构难于布局 ;②
其 可 在 一 定 范 围
f 转 .无 需 对 车 翻 的通用 性 。
I r A K A I R C S公 司 T
设 置 了 防 范 装 机
置 橡 胶 扭 杆 ,通
接 。通过 橡胶 扭 f 的要 求 :通过 橡 带轮 绕驱 动轴 可
得问题 。
A ● ●
轻 型 中 型 重 型
1 履 带 轮 转 换 技 术 的 发 展 应 用 与趋 势
( ) 带 轮 转 换 技 术 的 发 展 应 用 。 履 带 轮 转 换 系 统 技 1履 术 在 国 外 广 泛 应 用 于 (x )R 的 机 动 车 ,如 A V、S 44 ̄ 动 J T UV、
} 冲 。其 结 构 如 缓
轮 减震装 置非 常必 要 。将减 震 装置 和张 紧装 置进 行一 体
化 设 计 ,是 解 决 布 局 空 间受 限 的 有 效 途 径 。
() 3 基架 的设计 。 带 轮的总 体设计 中必须考 虑履 带 履
轮 的 总 体 方 案 是 中 间 支 撑 式 还 是 悬 臂 支 撑 式 。 悬 臂 支 撑