Information-Theoretic Bounds for Mobile Ad-hoc Networks Routing Protocols
Better bound on the exponent of the radius of the multipartite separable ball

,
(1)
in Frobenius norm, centered at the identity matrix, of separable (unentangled) positive semidefinite matrices (actually we do slightly better, but with the same asymptotic exponent). For qubits (d0 = 2) this radius is is (2/3)m/2−1 , to be compared to (1/2)m/2−1 from
ln 3 − 1) ≈ .29248125, compared [6]. If we express it as as κ2−γm , the exponent is γ = 0.5( ln 2
2
to [6]’s exponent of γ = 1/2. The non-qubit exponent is better, too, but approaches our earlier one as d0 → ∞. From this, we easily obtain a lower bound on the radius of the largest Frobenius-norm ball of separable normalized density matrices: for example, for m qubits it is (3/2) × 2−(1+γ )m ≡ (3/2) × 6−m/2 (versus our earlier 2 × 2−3m/2 ). A slightly better, but more complicated, version of our new bound lets us improve the factor 3/2 to √ 3m+1 /(3m + 3), which rapidly approaches 3. This gives a number of qubits below which NMR with standard pseudopure-state preparation techniques can access only unentangled states; with parameters realistic for current experiments, this is 36 qubits (compared to 23 qubits via our earlier results). We also address several points not strictly necessary for obtaining these results, but which relate to the power and nature of our methods, and the possibilities for strengthening the results. Szarek [7] found the first upper bound below unity on ball size, and recently Aubrun and Szarek [8] found an upper bound on ball size which matches (up to a logarithmic factor) the lower bound we obtain here for qubits, though for qudits with d > 2 there is still an exponential gap. One of the most natural mathematical methods for tackling this problem is to use a general result of F. John [9] relating the inner and outer ellipsoids of a convex set. We show that straightforward application of this natural method gives results weaker than we obtain here; weaker, in fact, than our earlier ones [6]. Our methods may appear technical; nevertheless, many of the intermediate results are mathematically interesting in their own right and have applications to quantum information problems other than the one at hand. Along the way we explain some of these, notably a variant proof of the result that the eigenvalues of a separable bipartite quantum state are majorized by those of its marginal density operators [10], and an example of the use of John’s theorem to bound the radii of other inner balls of quantum information-theoretic interest, in this case the inner ball of the convex hull of all maximally entangled states (related to an application-oriented entanglement measure, the fully entangled fraction of [11]). Many of our results use bounds on induced norms of various classes of maps on matrices, which we expect to be useful in other contexts. An appendix includes an additional bound, closely related to one used in the main argument, on the 2-to-∞ induced norm of stochastic linear maps that are positive on a radius-a ball of matrices around the identity.
Mutual information and minimum mean-square error in Gaussian channels

Almost Sure Convergence Theorems of Rate of Coin Tosses for Random Number Generation by Int
X
where N denote the set of all positive integers. 2
(b) Sup
-complexiity
rate
Let be a general process. We introduce the sup -complexity rate of an element of A1 or a sample path of the process. De nition 1 [2]: A function h : A1 ! [0; 1) de ned by 1 1 h(x) = lim sup log n 8x 2 A1 (x ) n!1 n is called the sup -complexity rate function . We call h (x) the sup -complexity rate of x. Next, we de ne the inf -complexity rate in a similar manner. De nition 2 [2]: A function h : A1 ! [0; 1) de ned by 1 1 h (x) = lim inf log n 8x 2 A1 n!1 n (x ) is called the inf -complexity rate function . We call h (x) the inf -complexity rate of x.
Interval algorithm for general sources 1) Set l = m = 1; s = t = (null string), s = t = 0; s = t = 1, I (s) = [ s ; s ) and J (t) = [ t; t ). 2) Partition the interval J (t) = [ t ; t) into M disjoint subintervals J (t1); J (t2); 1 1 1 ; J (tM ) such that J (tj ) = [ tj ; tj ) (j = 1; 2; 1 1 1 ; M ) where tj = t + (t 0 t )Qj 01 tj = t + (t 0 t )Qj
The International Journal of Advanced Manufacturing Technology
Ping LouÆZu-de ZhouÆYou-Ping ChenÆWu AiStudy on multi-agent-based agile supply chain management Received:23December2002/Accepted:23December2002/Published online:5December2003ÓSpringer-Verlag London Limited2003Abstract In a worldwide network of suppliers,factories, warehouses,distribution centres and retailers,the supply chain plays a very important role in the acquisition, transformation,and delivery of raw materials and products.One of the most important characteristics of agile supply chain is the ability to reconfigure dynami-cally and quickly according to demand changes in the market.In this paper,concepts and characteristics of an agile supply chain are discussed and the agile supply chain is regarded as one of the pivotal technologies of agile manufacture based on dynamic alliance.Also,the importance of coordination in supply chain is emphas-ised and a general architecture of agile supply chain management is presented based on a multi-agent theory, in which the supply chain is managed by a set of intelli-gent agents for one or more activities.The supply chain management system functions are to coordinate its agents.Agent functionalities and responsibilities are de-fined respectively,and a contract net protocol joint with case-based reasoning for coordination and an algorithm for task allocation is presented.Keywords Agile supply chainÆMulti-agent systemÆCoordinationÆCBRÆContract net protocol1IntroductionAdvanced technology and management are constantly being adopted to improve an enterpriseÕs strength and competitive ability in order to achieve predominance among hot global competition.In a report on21st century manufacturing strategy development,the author suggests that various production resources,including people,funds,technology and facilities should be inte-grated and managed as a whole;thus optimising the utilisation of resources and taking full advantage of advanced manufacturing technology,information tech-nology,network technology and computer[1].Agile manufacture based on dynamic alliance is coming into being so that enterprises can remain competitive in a constantly changing business environment and is becoming a main competitive paradigm in the interna-tional market.Agility,which has basically two mean-ings:flexibility and reconfigurability,has become a very important characteristic of a modern manufacturing enterprise.Flexibility is an enterpriseÕs ability to make adjustments according to customersÕneeds.Reconfigu-rability is the ability to meet changing demands[2,3].The ability to quickly respond to marketÕs changes, called agility,has been recognised as a key element in the success and survival of enterprises in todayÕs market.In order to keep up with rapid change,enterprises need to change traditional management in this hot competition. Through dynamic alliance,enterprises exert predomi-nance themselves,cooperate faithfully with each other, and compete jointly so as to meet the needs of the fluctuating market,andfinally achieve the goal of win-win[2,3].So how to improve agility in the supply chain, namelyflexibility and reconfigurability,is one of the important factors to win against the competition.Supply chain management(SCM)is an approach to satisfy the demands of customers for products and ser-vices via integrated management in the whole business process from raw material procurement to the product or service delivery to customers.In[4],M.S.Fox et al. describe the goals and architecture of integrated supply chain management system(ISCM).In this system,each agent performs one or more supply chain management functions,and coordinates its decisions with other rele-vant agents.ISCM provides an approach to the real timeInt J Adv Manuf Technol(2004)23:197–203 DOI10.1007/s00170-003-1626-xP.Lou(&)ÆZ.ZhouRoom107,D8Engineering Research Center of Numerical Control System,School of Mechanical Science&Engineering, Huazhong University of Science&Technology, 430074Wuhan,Hubei,P.R.ChinaE-mail:louping_98@Y.-P.ChenÆW.AiSchool of Mechanical Science and Engineering, Huazhong University of Science and Technology, 430074Wuhan,Hubei,P.R.Chinaperformance of supply chain function.The integration of multi-agent technology and constraint network for solving the supply chain management problem is pro-posed[6].In[7],Yan et al.develop a multi-agent-based negotiation support system for distributed electric power transmission cost allocation based on the networkflow model and knowledge query&manipulation language (KQML).A KQML based multi-agent coordination language was proposed in[8,9]for distributed and dy-namic supply chain management.However,the coordi-nation mechanisms have not been formally addressed in a multi-agent-based supply chain.In most industries, marketing is becoming more globalised,and the whole business process is being implemented into a complex network of supply chains.Each enterprise or business unit in the SCM represents an independent entity with conflicting and competing product requirements and may possess localised information relevant to their interests.Being aware of this independence,enterprises are regarded as autonomous agents that can decide how to deploy resources under their control to serve their interests.This paperfirst introduces concepts and characteris-tics of agile supply chains and emphasises the impor-tance of coordination in supply chain.Then,it presents an architecture of agile supply chain based on a multi-agent theory and states the agentsÕfunctions and responsibilities.Finally,it presents a CBR contract net protocol for coordination and the correlative algorithm for task allocation in multi-agent-based agile supply chains.2Agile supply chainA supply chain is a network from the topologic structure which is composed of autonomous or semi-autonomous enterprises.The enterprises all work together for pro-curement,production,delivery,and so on[10].There is a main enterprise in the supply chain that is responsible for configuring the supply chain according to the de-mand information and for achieving supply chain value using fundflow,materialflow and informationflow as mediums.There are three discontinuous buffers to make the materialflowfluently and satisfy the change in the demand.On the one hand,as every enterprise manages inventory independently,plenty of funds are wasted.As the demand information moves up-stream,the forecast is inaccurate and the respond to the change in demand is slow[11].Accordingly,the key method for competi-tiveness is improving and optimising supply chain management to achieve integrated,automated,and agile supply chain management and to cut costs in the supply chain.To optimise supply chain management and coordi-nate the processes for materialflow,fundflow and informationflow,it is necessary to make materialflow fluent,quickly fund turnover and keep information integrated.Prompt reconfiguration and coordination is an important characteristic of agile supply chain according to dynamic alliance compositing and de-compositing(enterprise reconfiguration).Agile supply chain management can improve enterprise reconfiguring agility.The agile supply chain breaks through the tra-ditional line-style organizational structure.With net-work technology an enterprise group is formed by a cooperative relationship which includes an enterprise business centre,a production design centre,a supplier,a distribution centre,a bank,a decision-making centre, etc.It reduces the lead time to the market to satisfy customer demand.Agile supply chain without temporal and spatial limits promptly expands the enterprise scale,marketing share and resource by allied enterprise.So,a key factor of the agile supply chain is to integrate heterogeneous information systems adopted in various enterprises.The integration information system can provide marketing information and supplier details.Feasible inventory, quantity and cycle of replenished stock,delivery,etc.is designed using the shared information.It is evident that agile supply chain is a typical distributed system.A multi-agent system(MAS)which is characterised byflexibility and adaptability is suit-able for an open and dynamic environment.Thus MAS is a good method for agile supply chain man-agement.3The concept of agents and MASSome people define an agent as any piece of software or object which can perform a specific given task.Presently the prevailing opinion is that an agent must exhibit three important general characteristics:autonomy,adapta-tion,and cooperation[8,12,13].Autonomy means that agents have their own agenda of goals and exhibit goal-directed behaviour.Agents are not simply reactive,but can be pro-active and take initiatives as they deem appropriate.Adaptation implies that agents are capable of adapting to the environment,which includes other agents and human users,and can learn from the expe-rience in order to improve themselves in a changing environment.Cooperation and coordination between agents are probably the most important feature of MAS. Unlike those stand-alone agents,agents in a MAS col-laborate with each other to achieve common goals.In other words,these agents share information,knowledge, and tasks among themselves.The intelligence of MAS is not only reflected by the expertise of individual agents but also exhibited by the emerged collective behaviour beyond individual agents.Of course various agents have different functions,but some functions are needed for each agent.A generic structure of agents that includes two parts is presented:agent kernel and function mod-ule.Figure1exhibits the generic structure of agents which is a plug-in model.In Fig.1,the generic agent includes the following components:198The mailbox handles communication between one agent and the other agents.The message handler processes incoming message from the mailbox,orders them according to priority level,and dispatches them to the relevant components of the agent.The coordination engine makes decisions concerning the agent Õs goals,e.g.how they should be pursued,when to abandon them,etc.,and sends the accepted tasks to the planner/scheduler.It is also responsible for coordi-nating the agents Õinteractions with other agents using coordination protocols and strategies.The planner and scheduler plans the agent Õs tasks on the basis of decisions made by the coordination engine and on resources and task specifications available to the agent.If not,a message is sent to the coordination en-gine for finding extra resources.The blackboard provides a shared work area for exchanging information,data,and knowledge among function modules.Every function module is an inde-pendent entity.These function modules execute con-currently by the control of planner/scheduler and collaborate through the blackboard.The acquaintance database describes one agent Õs relationships with other agents in the society,and its beliefs about the capabilities of those agents.The coor-dination engine uses information contained in this database when making collaborative arrangements with other agents.The resource database reserves a list of resources (referred to in this paper as facts)that are owned by and available to the agent.The resource database also sup-ports a direct interface to external systems,which allows the interface to dynamically link and utilise a proprie-tary database.The ontology database stores the logical definition of each fact type—its legal attributes,the range of legal values for each attribute,any constraints betweenattribute values,and any relationship between the attributes of that fact and other facts.The task/plan database provides logical descriptions of planning operators (or tasks)known to the agent.4Multi-agent-based agile supply chain management Multi-agent-based agile supply chain management per-forms many functions in a tightly coordinated manner.Agents organise supply chain networks dynamically by coordination according to a changing environment,e.g.exchange rates go up and down unpredictably,customers change or cancel orders,materials do not arrive on time,production facilities fail,etc.[2,14].Each agent performs one or more supply chain functions independently,and each coordinates his action with other agents.Figure 2provides the architecture of multi-agent-based agile supply chains.There are two types of agents:functional agents and mediator agents.Functional agents plan and/or control activities in the supply chain.Mediator agents play a system coordinator role s by promoting coopera-tion among agents and providing message services.Mediator agents dispatch the tasks to the functional agents or other mediator agents,and then those func-tional or mediator agents complete the tasks by coordi-nation.All functional agents coordinate with each other to achieve the goals assigned by mediator agents.The mediator-mediator and mediator-agent communication is asynchronous,and the communication mode can be point-to-point (between two agents),broadcast (one to all agents),or multicast (to a selected group of agents).Messages are formatted in an extended KQML format.The architecture is characterised by organizational hier-archy and team spirit,simplifying the organisational architecture and reducing the time needed to fulfil the task.The rest of this section briefly describes each of the mediator agents underdevelopment.Fig.1Generic structures of agents199–Customer mediator agent:This agent is responsible for acquiring orders from customers,negotiating with customers about prices,due dates,technical advisory,etc.,and handling customer requests for modifying or cancelling respective orders,then sending the order information to a scheduling mediator agent.If a customer request needs to be re-designed,the infor-mation is sent to a design mediator agent,then to a scheduling mediator agent.–Scheduling mediator agent:This agent is responsible for scheduling and re-scheduling activities in the fac-tory,exploring hypothetical ‘‘what-if’’scenarios for potential new orders,and generating schedules that are sent to the production mediator agent and logis-tics mediator agent.The scheduling agent also acts as a coordinator when infeasible situations arise.It has the capability to explore tradeoffs among the various constraints and goals that exit in the plant.–Logistics mediator agent:This agent is responsible for coordinating multi-plans,multiple-supplier,and the multiple-distribution centre domain of the enterprise to achieve the best possible results in terms of supply chain goals,which include on-time delivery,cost minimisation,etc.It manages the movement of products or materials across the supply chain from the supplier of raw materials to the finished product customer.–Production mediator agent:This agent performs the order release and real-time floor control functions as directed by the scheduling mediator agent.It monitors production operation and facilities.If the production operation is abnormal or a machine breaks down,this agent re-arranges the task or re-schedules with the scheduling mediator agent.–Transportation mediator agent:This agent is responsible for the assignment and scheduling of transportation resources in order to satisfy inter-plant movement specified by the logistics mediator agent.It is able to take into account a variety oftransportation assets and transportation routes in the construction of its schedules.The goal is to send the right materials on time to the right location as assigned by the logistics mediator agent.–Inventory mediator agent:There are three invento-ries at the manufacturing site:raw product inven-tory,work-in-process inventory,and finished product inventory.This agent is responsible for managing these inventories to satisfy production requirements.–Supplier mediator agent:This agent is responsible for managing supplier information and choosing suppli-ers based on requests in the production process.–Design mediator agent:This agent is responsible for developing new goods and for sending the relevant information to the scheduling mediator agent for scheduling,as well as to the customer mediator agent for providing technological advice.5Coordination in a multi-agent-based agile supply chainCoordination has been defined as the process of man-aging dependencies between activities [15].One impor-tant characteristic of an agile supply chain is the ability to reconfigure quickly according to change in the envi-ronment.In order to operate efficiently,functional entities in the supply chain must work in a tightly coordinated manner.The supply chain works as a net-work of cooperating agents,in which each performs one or more supply chain functions,and each coordinates its action with that of other agents [5].Correspondingly,a SCMS transforms to a MAS.In this MAS,agents may join the system and leave it according to coordinating processes.With coordination among agents,this MAS achieves the goal of ‘‘the right products in the right quantities (at the right location)at the right moment at minimalcost’’.Fig.2An architecture of multi-agent based agile supply chain management2005.1Contract net protocol combined withcase-based reasoningThe contract net is a negotiation protocol(CNP)pro-posed by Smith[15].In the CNP,every agent is regarded as a node,such as a manager or a contractor.The manager agent(MA)is responsible for decomposing, announcing,and allocating the task and contractor agent(CA)is responsible for performing the task.This protocol has been widely used for multi-agent negotia-tion,but it is inefficient.For this reason,contract net protocol is combined with case-based reasoning(CBR).In case-based reasoning(CBR),the target case is defined as problem or instance which is currently being faced,and the base case is problem or instance in the database.CBR searches the base case in the database under the direction of the target case,and then the base case instructs the target case to solve the problem.This method is efficient.But at the very beginning,it is very difficult to set up a database which includes all problems solving cases.The cases may be depicted as follows:C¼\task;MA;taskÀconstraint;agentÀset> Here,MA is task manager.Task-constraint repre-sents various constraint conditions for performing the task,depicted as a vector{c1,c2,c3,...,c m}.Agent-set is a set of performing the task as defined below:Agent set¼\sub task i;agent id;cost;time;resource>f gtask¼[ni¼1sub task iIn the supply chain,the same process in which a certain product moves from the manufacturer to the customer is performed iteratively.So,case-based rea-soning is very efficient.Consequently,combining con-tract net protocol with CBR could avoid high communicating on load,thus promoting efficiency.The process can be depicted as follows(Fig.3).5.2The algorithm for task allocation baseon CBR contract net protocolThere are two types of agents in the supply chain, cooperative and self-interested agents.Cooperative agents attempt to maximise social welfare,which is the sum of the agents utilities.They are willing to take individual losses in service of the good of the society of agents.For example,function agents come from the same enterprise.In truth,the task allocation among cooperative agents is combinational optimisation prob-lem.Self-interested agents seek to maximise their own profit without caring about the others.In such a case,an agent is willing to do other agentsÕtasks only for com-pensation[16].Function agents,for example,come from different enterprises.In the following section the algorithm for task allo-cation among self-interested agents based on CBR contract net protocol will be addressed.Before describ-ing the algorithm,there are some definitions that must be clarified:Task—A task which is performed by one agent or several agents together:T=<task,reward,con-straints>,where task is the set of tasks(task={t1,t2,..., t m}),reward is the payoffto the agents that perform the task(reward={r1,r2,...,r m}),and constraints refer to the bounded condition for performing the task(con-straints={c1,c2,...,c n}).Agent coalition(AC)—A group of agents that per-form task T,described as a set AC={agent i,i=1,2,...,n}.Efficiency of agent—Efficiency of an agent i is de-scribed as follows:E i¼rewardÀcostðÞ=costð1Þwhere reward is the payoffto the agent performing task T,and cost refers to that spend on performing the task. If agent i is not awarded the task,then E i=0.Efficiency of agent coalition—E coalition¼rewardÀX micost iÀh!,X micost iþh!ð2Þwhere reward is the payoffof the agent coalition per-forming task T;cost i refers to that spend on performing task t i;and h is the expense on forming coalition,which is shared by the members of the coalition.If the coalition is not awarded task T,then E coalition<=0.6Algorithm:1.After MA accepts the task T=<task,reward,constraint>(task is decomposable),then it searches the database.2.If itfinds a corresponding case,it assigns the task orsubtask to the related agents according to the case, and the process is over3.If no case is found,then the task T is announced toall relevant agents(agent i,i=1,2,...n).4.The relevant agents make bids for the task accord-ing to their own states and capabilities.Thebid Fig.3CBR contract net process201from agent i can be described as follows:Bid i =<agentid i ,T i ,price i ,condition i >,where i ex-presses the bidding agent (i =1,2,...,h );agentid i is the exclusive agent identifier;T i is the task set of agent i Õs fulfilment;price i is the recompense of agent i fulfilling the task T i ;and condition i is the constraint conditions for agent i to fulfil the task T i .5.If [1 i h&T i then the task T can not be performed.Otherwise MA makes a complete combination of the agents,namely to form a number of agent coalitions (or agent sets,amounting to N =2h )1).6.First MA deletes those agent coalitions where no agents are able to satisfy the constraint condition.Next the rest of the coalitions are grouped by the number of agents in coalitions and put into set P (P ={P 1,P 2,...,P h })in order of the minimum re-compense increase of the coalitions,where P i is the set of agent coalitions,including i agents.7.MA puts the first coalition from each group P i(i =1,2,...,h )into set L ,and if L is null then it returns to (10),otherwise it calculates the minimum re-compense of each coalition as follows:Min Pm iprice i ÃT is :t :P h i ¼1T i TP m icondition i constraitThen it searches for the minimal agent coalition AC min from the set L .8.MA sends the AC min to the relevant agents,namely MA requests that these agent fulfil the task to-gether.The relevant agents calculate the E coalition and E i according to Eqs.1and 2.IfE coalition !max miE i ,then all agents in the AC minaccept the proposal to form a coalition to perform the task T together.MA assigns the task to the AC min ,and the process is over.Otherwise it deletes the AC min from P i and returns to (7).9.If the relevant agents accept the task or subtask,then MA assigns the task to them.The process is over.If some agents cannot accept the subtask and the stated time is not attained,then it returns to (3),otherwise it returns to (10).10.The process is terminated (namely the task cannotbe performed).After all processes have been completed,case-based maintenance is required to improve the CBR.Thus efficiency is continuously promoted.6.1An example–A simple instantiation of a supply chain simulation is presented here and the negotiating process among agents is shown.In this supply chain instantiation,thetransportation mediator agent (TMA)has a transporttask T ,in which it has to deliver the finished product to the customer within 15units of time and must pay 1500monetary units for it,that is T =<t ,1500,15>.Four transport companies can perform task T .Each company is an autonomous agent,that is four agents,agent A,agent B,agent C and agent D.So the TMA announces the task T to the four agents.Then the four agents make a bid for the task T as shown in Table 1.–So the four agents can form 24)1coalitions (see Fig.4),which are put into set P .Cooperation between agents in the coalition requires expense and the ex-pense for forming the coalition increases with the growth of in coalition size.This means that expanding the coalition may be non-beneficial.The expense of each agent in forming a coalition h is 100.First,the coalitions in which no agents can satisfy the constraint conditions are deleted from the set P .The rest of the coalitions are grouped by the number of agents in the coalition and ordered according to the recompense of each group that was increased due to the coalition,namely P 1={B},P 2={{A,B},{A,C},{B,C},{A,D},{B,D}},P 3={{A,B,C},{A,B,D},{B,C,D}},P 4={{A,B,C,D}}.Then the cost and efficiency of coalition {B},{A,C}and {A,B,C}are calculated as follows:Price f A ;B g ¼Min ð800x 1þ1200x 2Þs :t :20x 1þ12x 2 15x 1þx 2!1x 1!0:x 2!0Price f A ;B ;C g ¼Min ð800y 1þ1200y 2þ2000y 3Þs :t :20y 1þ12y 2þ5y 3 15y 1þy 2þy 3!1y 1!0:y 2!0;y 3!Fig.4Agent coalition graphTable 1The bids of four agents Agent Id Price Conditions Agent A 80020Agent B 120012Agent C 20005AgentD25003202the following result can be obtained:Price{B}=1200; x1=0.3750,x2=0.6250,Price{A,B}=1050;and y1= 0.3750,y2=0.6250,y3=0.The above result shows that agent B does not attend the coalition{A,B,C},that is both agent B and coalition{A,B}can fulfill the task and satisfy the constraint conditions.According to Eqs.1 and2,E A,E B,E{A,B}:E A=0(because TMA does not assign the task to A.),E B=(1500)1200)/1200=0.25, E{A,B}=(1500)1050)2*100)/(1050+2*100)=0.2can be obtained.Because of E{A,B}<max{E A,E B},agent B does not agree to form a coalition.Therefore,the TMA se-lects agent B to fulfil the task.7ConclusionsIn this paper,the concept and characteristics of agile supply chain management are introduced.Dynamic and quick reconfiguration is one of important characteristics of an agile supply chain and agile supply chain man-agement is one of the key technologies of agile manu-facturing based on dynamic alliances.As agile supply chain is a typical distributed system,and MAS is effi-cient for this task.In the architecture of agile supply chain management, the supply chain is managed by a set of intelligent agents that are responsible for one or more activities.In order to realise the agility of supply chains,coordination amongst agents is very important.Therefore,it can be suggested that contract net protocol should be combined with case-based reasoning to coordinate among agents. Acknowledgement The authors would like to acknowledge the funding support from the National Science Fund Committee (NSFC)of China(Grant No.5991076861).References1.Goldman S,Nagel R,Preiss K(1995)Agile competitors andvirtual organization.Van Nostrsand Reinhold,New York, pp23–32,pp158–1662.Yusuf YY,Sarhadi M,Gunasekaran A(1999)Agile manu-facturing:the drivers,concepts and attributes.Int J Prod Eng 62:33–433.Gunasekaran A(1999)Agile manufacturing:A framework forresearch and development.Int J Prod Eng62:87–1054.Fox MS,Chionglo JF,Barbuceanu M(1992)Integrated chainmanagement system.Technical report,Enterprise Integration Laboratory,University of Toronto5.Shen W,Ulieru M,Norrie DH,Kremer R(1999)Implementingthe internet enabled supply chain through a collaborative agent system.In:Proceedings of agentsÔ99workshop on agent-based decision support for managing the internet-enabled supply-chain,Seattle,pp55–626.Sandholm TW,Lesser VR(1995)On automated contracting inmulti-enterprise manufacturing.Advanced Systems and Tools, Edinburgh,Scotland,pp33–427.Beck JC,Fox MS(1994)Supply chain coordination via medi-ated constraint relaxation.In:Proceedings of thefirst Canadian workshop on distributed artificial intelligence,Banff,Alberta, 15May19948.Chen Y,Peng Y,Finin T,Labrou Y,Cost R,Chu B,Sun R,Willhelm R(1999)A negotiation-based multi-agent system for supply chain management.In:Working notes of the ACM autonomous agents workshop on agent-based decision-support for managing the internet-enabled supply-chain,4:1–79.Wooldridge M,Jennings NR(1995)Intelligent agents:theoryand practice.Knowl Eng Rev10(2):115–15210.Barbuceanu M,Fox MS(1997)The design of a coordinationlanguage for multi-agent systems.In:Muller JP,Wooldridge MJ,Jennings NR(eds)Intelligent agent III:agents theories, architecture and languanges(Lecture notes in artificial intelligence),Springer,Berlin Heidelberg New York,pp341–35711.Hal L,Padmanabhan V,Whang S(1997)The Bullwhip effect insupply chains.Sloan Manag Rev38(4):93–10212.Yung S,Yang C(1999)A new approach to solve supply chainmanagement problem by integrating multi-agent technology and constraint network.HICASS-3213.Yan Y,Yen J,Bui T(2000)A multi-agent based negotiationsupport system for distributed transmission cost allocation.HICASS-3314.Nwana H(1996)Software agents:an overview.Knowl Eng Rev11(3):1–4015.Smith RG(1980)Contract net protocol:high-level communi-cation and control in a distributed problem solver.IEEE Trans Comput29(12):1104–111316.Barbuceanu M,Fox MS(1996)Coordinating multiple agentsin the supply chain.In:Proceedings of thefifth workshop on enabling technology for collaborative enterprises(WET ICEÕ96).IEEE Computer Society Press,pp134–14117.Jennings NR,Faratin P,Norman TJ,OÕBrien P,Odgers B(2000)Autonomous agents for business process management.Int J Appl Artif Intell14(2):145–1818.Malone TW,Crowston K(1991)Toward an interdisciplinarytheory of coordination.Center for coordination science tech-nical report120,MIT Sloan School203。
information gap theory 英语考试

information gap theory 英语考试Information Gap TheoryInformation Gap Theory is a theory that focuses on the gap between the amount of information available to individuals and their actual information needs. It was developed by scholars in the field of communication studies to address the challenges of information overload and the difficulty of obtaining relevant information in today's digital age.In an information-rich environment, individuals may have access to a vast amount of information, but this information may not be tailored to their specific needs or preferences. As a result, they may struggle to find the information that is most useful or relevant to their situation. This is where Information Gap Theory comes into play.The theory suggests that individuals are unable to keep up with the constant flow of information available to them, and that they struggle to filter out irrelevant information and find relevant, timely, and accurate information that meets their needs. To address this gap, Information Gap Theory suggests that individuals need torely on professional communication experts or skilled intermediaries to help them identify and access the most relevant information for their specific situation.In an English exam context, Information Gap Theory can be applied to writing tasks that require students to synthesize and evaluate information from multiple sources. Students may be given a question that requires them to find and analyze specific information, or to use their own research skills to find answers to complex problems. By relying on Information Gap Theory, students can approach such tasks with a focus on their own information needs and how best to meet them.Therefore, Information Gap Theory provides a valuable framework for understanding how individuals access and manage information in today's digital age. It can assist students in improving their research skills and writing abilities, as well as provide them with a better understanding of how to access and use information effectively in a range of contexts.。
Lane-Changing Model
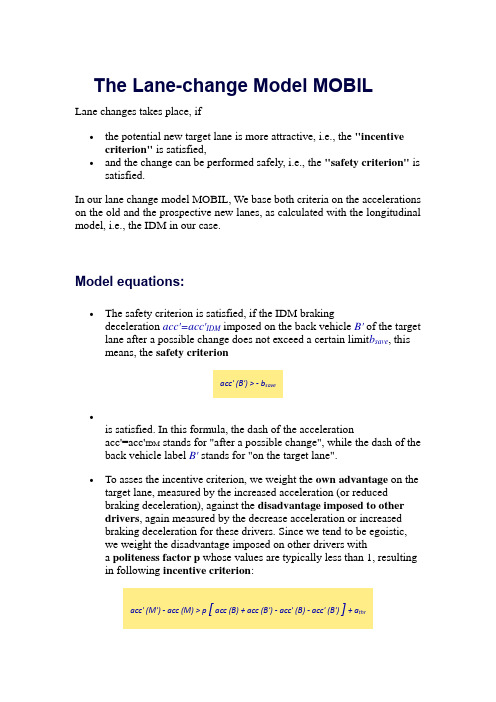
The Lane-change Model MOBILLane changes takes place, if∙the potential new target lane is more attractive, i.e., the "incentive criterion" is satisfied,∙and the change can be performed safely, i.e., the "safety criterion" is satisfied.In our lane change model MOBIL, We base both criteria on the accelerations on the old and the prospective new lanes, as calculated with the longitudinal model, i.e., the IDM in our case.Model equations:∙The safety criterion is satisfied, if the IDM brakingdeceleration acc'=acc'IDM imposed on the back vehicle B' of the target lane after a possible change does not exceed a certain limit b save, thismeans, the safety criterionacc' (B') > - b save∙is satisfied. In this formula, the dash of the accelerationacc'=acc'IDM stands for "after a possible change", while the dash of the back vehicle label B' stands for "on the target lane".∙To asses the incentive criterion, we weight the own advantage on the target lane, measured by the increased acceleration (or reducedbraking deceleration), against the disadvantage imposed to otherdrivers, again measured by the decrease acceleration or increasedbraking deceleration for these drivers. Since we tend to be egoistic,we weight the disadvantage imposed on other drivers witha politeness factor p whose values are typically less than 1, resultingin following incentive criterion:acc' (M') - acc (M) > p [ acc (B) + acc (B') - acc' (B) - acc' (B') ] + a thro As above, acc mean the actual IDM accelerationswhile acc' mean the accelerations after a possible change. Thecar labels M and M' mean "Me" before and after a possiblechange, respectively, while B and B' mean the back vehiclebefore and after a possible change, respectively.o The own advantage is measured by "my" accelerationdifference acc' (M') - acc (M) after the change, compared to theactual situation.o The combined disadvatage to the new and old back vehicles is given by the sum [acc (B) + acc (B')] of the accelerations ofboth vehicles before the change, minus the accelerationsum[acc' (B) + acc' (B')] of these vehicles after the change.o Note on implementation: In the actual version, we did not consider the disadvantage acc(B) - acc'(B), that the driver ofthe "old" back vehicle may suffer due to a lane change, so weused the incentive criterionacc' (M') - acc (M) > p [ acc (B') - acc' (B') ] + a throIn fact, acc(B) - acc'(B) nearly always is negative sincechanging to another lane generally gives an advantage to thedriver of B. This means, we ignored "pushy" people urging usto change lanes for their own benefit. This definitely is acorrect strategy for drivers on the right-hand lane while the"full" MOBIL should be considered for drivers on the left-handlane.o To avoid lane-change maneoeuvres triggered by marginal advantages which can lead to frantic lane hopping, anadditional lane-changing threshold a thr has been added to thebalance of the above equation.Model Parameters and Typical ValuesThe lane-change model MOBIL has the following main features:While other lane-change models typically assume purely egoistic behaviour, i.e., p=0, we can model different behaviours by varyingthis factor:o p > 1 => a very altruistic behaviour.o p in ]0, 0.5] => a realistic behaviour: Advantages of otherdrivers have a lower priority, but are not neglected: Notice thatthis feature means that yielding to "pushy" is included intoMOBIL.o p=0 => a purely selfish behaviour. Notice that also selfish drivers do not ignore the safety criterion!o p<0 => a malicious personality who takes pleasure inthwarting other drivers even at the cost of own disadvantages.This may have some interesting game-theoretic consequences.Of course, even those mischief makers do obey the safetycriterion.∙ A special case is given by p=1 and a thr=0. In this case, lane changing takes place whenever the sum of the accelerations of all affecteddrivers increases after the change, or, equivalently, the overalldecelerations are minimized. This effect gave birth to the acronym for this model:MOBIL = M inimizing O verall B raking decelerations I nduced by L ane changes Variants of MOBIL for asymmetric traffic rules or situationsThe model defined by the two equations above describes more or less symmetric lane usage where overtaking on the right is not explicitely forbidden. If traffic rules or situations are asymmetric, one needs modifications. In the following, there are some typical situations:∙In many European countries, the lane usage rules are explicitely asymmetric, particularly,o one should keep to the right,o overtaking to the right is forbidden unless traffic is congested.For some countries such as Thailand, Britain or Australia, swap "left"and "right". To incorporate the keep-right directive, we added to the incentive criterion an additional bias a bias in favour of the right lane.∙If there are forced lane changes such aso entering a freeway via an onramp,o exiting a freeway,o lane changes as a reaction of a closing of the actual lane ahead,the lane-usage bias introduced above can be used to treat this situation: Of course, the bias is in favour of the target lane(s):o For on-ramp traffic, a bias is negative (modelling a bias to the left)o For the lane closing szenario 3, a bias is positive for vehicles on the left lane that is about to be closed.∙Implementing the overtaking rule is more difficult and requires a so-called "longitudinal-transversal coupling", see this reference (inGerman) for details.References∙The original publication (in German):M. Treiber and D. Helbing, Realistische Mikrosimulation vonStraßenverkehr mit einem einfachen Modell, 16. Symposium"Simulationstechnik ASIM 2002" Rostock, 10.09 -13.09.2002, edited by Djamshid Tavangarian and Rolf Gr\"utzner pp. 514--520.。
The Informational Energy for Cellular Automata
The Informational Energy for Cellular AutomataIoan Hălălae“EFTIMIE MURGU” University, Faculty of Engineering, Traian Vuia Square 1-4, 320085 Resita, RomaniaPhone: +40 255 210227, Fax: +40 255 210230, e-mail: i.halalae@uem.ro Abstract: Cellular automata (CA) represent lately a widely used model for modelling the dynamic phenomena. Generally, they are used in a rather empirical manner. This paper proposes the adaptation of the informational energy concept for CA and its use as a predictor for the evolution of CA.Keywords: cellular automata, randomness, prediction, informational energy, experimental mathematics1 IntroductionIn a larger context [1] I have studied the possibility of using CA as noise generators. The starting point was the project 'Looking for the lost noise' [2].Our proposal is to use, as a generator of pseudo-random sequences, an uniform CA with 256 cells that can have two states, over which a global loop is closed. We add several new things to the classical use of a CA, in order to improve the ‘random’ evolution.The random evolution is manifesting itself into a chaotic process, very sensitive to the initial state of a simple device working according to a strange rule.The first problem is that CA are ‘implicitly’ considered as having a random evolution. Randomness is not rigorously defined for CA. More generally, the notion of evolution of CA either is not clearly defined (that is, formally, or, at least, functionally).In order to make the monitoring, we have devised a new methodology. We have functionally devised the notions of evolution, randomness and cyclic character in CA. As regards randomness, we have adapted G. Chaitin’s definition for binary strings.2 Theoretical Concepts2.1 Cellular AutomataAn ‘elementary’ cellular automaton consists of a sequence of sites carrying values 0 or 1 arranged on a line. The configurations of the system are thus sequences of 0 and 1. In general, the sites of a cellular automaton may be arranged on any regular lattice, and each site may take on any discrete set of values.They evolve in a series of time steps. At each step, the value of each site is updated according to a specific rule. The rule depends on the value of a site, and the values of, say, its two nearest neighbours. The value at each site evolves deterministically with time according to a set of definite rules involving the values of its nearest r neighbours. Different rules (lookup tables) generate different types of dynamics of CA, when the rules are iterated in time ([3], [4], [5], [6]).2.2 Randomness and PredictionG. Chaitin established in a large set of papers ([7]–[11]) a complete theory about randomness, connected with the capacity of programs for computing finite binary sequences. In short, he defines a string as being random if his shorter representation is the string itself. In other words, a string of bits is random as long as it does not repeat itself. When it starts repeating itself, it can be represented by an algorithm, and becomes predictable.We adopt here the same functional point of view for CA: when it starts repeating itself it becomes predictable. Automaton’s evolution is random until it starts cycling.We decide to stop the automaton in the moment it starts cycling, and to consider its evolution as complete.2.3 Experimental MathematicsExperimental Mathematic is a paradigm appearing in association "with the exploratory use of a computer" [12], especially "when one attempts to analyze experimentally algorithms" [13].In our case, we have used the computer for simulating CA. The space of the solutions is of the 2256 dimension.2.4 The Main ChallengeThe main challenge is the one S. Wolfram formulated in [14]: ‘But what should be done is to find a characterization of those properties whose behaviour can be found by efficient methods, and those for which computational irreducibility makes explicit simulation the only possible approach, and precludes a simple description.’2.5 The ProjectThe project presented here aims to explore the possibility of using the CA as random number generators. Simulation was made with linear CA, with 256 cells. We did not use genetic algorithms for obtaining better chromosomes from the older ones.3 The Project PresentationThe starting point was the project 'Looking for the lost noise'by Gh. Stefan [2]. Let us see an abstract of this paper, which can be considered the starting point of our paper.The proposal is to use a CA as pseudo-noise generator, to which a global loop was added (fig. 1).Figure 1One of the simplest programmable CA, with a global loop closed through summation function Our hope is that the ‘feed forward’ of the attached loop improves the random behaviour of the system.The transition function over a loop being very simple, the random behaviour depends only on the initial state of the CA. In the design process the main step is to find a ‘noisy’ initial state.Conclusions: the only way to present the machine behaviour is to make it work as a simulator. The formal method of using is the experimental mathematics.S. Wolfram [15] was the first to use CA as noise pseudo-generators. He used thelinear and uniform CA, with two states cells.4 The Development of the Project4.1 ChromosomesWe use a definition of randomness inspired by G. Chaitin: an automaton is random as long as its evolution cannot be predicted. From the moment when its evolution can be predicted, it is no longer random. An automaton is random until it starts cycling. So the problem is rephrased as follows: no matter the value, we stop an automaton when it becomes cyclic.Practically, one way or another, we must:•have an evidence of the states of the automaton, in the order of their appearance, and•test a new state of the automaton (the current status, the last one resulted from the calculus process) if it appears from the first time or not.If we find it in the ‘history’ of the automaton, it represents the end of the first cycle of the automaton and the generation of new states stops. If not, the new status is to be archived and the iterations continue.We keep the whole automaton ‘history’ in a matrix, whose successive rows memorize the automaton’s states in the order of their apparition. We will name this matrix ‘the evolution matrix’.In order to synthesize the results, we have to monitor the chromosomes in two different ways:•the first one, we monitor for each chromosome the evolution as an internal mechanism of the cellular automaton•the second one, we archive the results of each chromosome, individually, together with its initial configuration and the performanceAnd, of course, not to repeat the tests for the same chromosome.As regards chromosomes, there are two problems:•the generation of the initial states•the concrete work with a CA.We have systematically generated distinct chromosomes.For actually working with a cellular automaton (monitoring the evolution of the automaton), we arrived at the following diagram:1.An initial state is generated2.The initial state is memorized in the evolution matrix, in line 1 of the matrix;a counter number_cycles_of_life is initialized with 1.3. A calculating function is applied to a new state of the automaton; we name thenew state of the automaton chromosome_current; the counter number_cycles_of_life is increased with 1.4.The sequential chromosome_current is compared with the values from theevolution matrix, from position 1 to position number_cycles_of_life-1 the sequential chromosome_current is compared to the values in the evolution matrix, from position 1 to position number_cycles_of_life-15.If an equality does not appear, the chromosome_current is memorized in theevolution matrix; and we came back to step 36.If an equality appears (the value already exists; that means that thechromosome_current represents the closure of the first cycle), the experiment stops, but (number_cycles_of_life -1) represents the performance of the chromosome; we archive the chromosomeThe archiving of the results is made in a database.4.2 The Connection between the Automaton’s Initial Structureand PerformanceIn all the discussions about the CA the local structure is mentioned. By local structure we understand the spatial distribution of values ‘0’/’1’ (the CA configuration). Associated to the notion of local structure there appears that of density: the number of values ‘1’ in the initial configuration of CA. Nevertheless, there was no systematic exploration of the combination of these two factors.We generated 500.000 CA with similar densities, between 124 and 133. The results are those in table 1. By performance we understand the number of tacts until the automaton becomes cyclic. We have generated the data and counted the results by groups.Performance Number of cases8283-54 454.55-106 0107-158 10159-210 0211-262 42.325825263-314 2.315-366 0367-418 0419-470 0471-518 12Table 1Statistics for the automata evolutionsThe great variation of the performances of the chromosomes that have similar initial densities leads us to the necessity of a differentiating criterion between algorithms with the same initial density. A possibility of global characterizing of the automaton would implicitly represent a prediction instrument too.5 Comportamental FactorizationWe try to solve this problem: how can we realize a differentiation between the cellular automata with the same density.We arrive at the specificity of cellular automata: the modification of the cell value by reaction to the neighbourhood. Thus, it appeared the idea of the classification of automata by factorization according to the initial value of the cells. In this way we have a possibility of differentiation of cellular automata with the same initial density.Now, these results led us to the idea mentioned above: classification of automata by the factorization according to the value of the cells. Let us remember the calculation of the new value of a cell:C(i,n) = C(i-1,n-1) + C(i,n-1)* 2 + C(i+1,n-1)*22where we have noted C(j,k) the value of the j cell at a moment k. The value C(i,n) is the value of the cell from the calculus table, on a line corresponding to the density of the automaton.Practically, we obtain the notations:0 0 0 ⇒0 noted v01 0 0 ⇒1 noted v10 1 0 ⇒2 noted v21 1 0 ⇒3 noted v30 0 1 ⇒4 noted v41 0 1 ⇒ 5 noted v50 1 1 ⇒6 noted v61 1 1 ⇒7 noted v7which we shall use below.6 The Informational Energy in Cellular Automata We studied the problem of the structure according to the point of view of informational …disorder”: we calculated the global informational energy of a cellular automaton, making an adaptation of the classical Onicescu formula. First, let us remember the definition of the informational energy ([Onicescu ‘79]). The global information of the system S with the states s 1, s 2, …, s n having the following weigths p 1, p 2, …, p n can be expressed by its informational energy calculated with the formula:21j n j s p E =∑= (1) (where 11=∑=j nj p ) Let’s go back, now, to the discussion from the preceding paragraph. In the classical formula (1) s 1, s 2, …, s n , represent the states of the system. In the case of the cellular automaton, the state of the system is its interior configuration at a certain moment. We are in the situation to make an adaptation of the concept. The form in which we use the concept of informational energy is the following: E = ( v 02 + v 12 + v 22 + v 32 + v 42 + v 52 + v 62 + v 72 )/ 2562 (2) where the notations v 0, v 1, …,v 7 represent the factorization of cells according to the local states.6.1 Correlations between Performance and EnergyWe arrive at the connection between the automaton’s performance and the informational energy (calculated with formula 2).We browsed again the database which contains the chromosomes. For each of them we calculated for each cell the classification v0 … v7. We counted the result in a file. Then, we calculated the corellation between the chromosome’s performance and the initial structure: using the v0 … v7 counter, ve calculated the informational energy using formula 2. The results are in table 2.Density m/e Corelation124 0.0261134125 0.0754734126 0.0474427127 0.3759557128 0.5101165129 0.4001813130 0.8669366131 0.1601014132 0.8857184133 0.0557577Table 2The conection between performance (m) and informational energy (e). Conclusions and directions for further researchLet us first see which are the totally new results brought about by this paper. On a conceptual level:• A functional definition of evolution, randomness and cyclicity were given for CA. Until now, the notions of evolution and cyclicity were not clearly defined.•There are no mathematical concepts for the calculations connected to the parallel phenomena. The informational energy introduced here is the first classic mathematical concept adapted to parrallel phenomena.•Until now, discussions were moreover ‘intuitive’, based on a small number of experiments and on a graphical interpretation (visualization) of the results.We have refocused the discussions, from the domain of ‘intuition’, to that of figures.On a practical level, we have, too, some immediate directions for further research:•Regarding the global energy itself it remains to be studied the measure in which it can become a fine predictor for the characterisation of the evolution of automata, by doing again the calculations with partial regressions.•The numerical results are dispersed. But this aspect is typical for phenomena with nonlinear dynamics.Remember that on some portions we have a remarkable correlation. This leads us tpo the idea of modeling the behaviour of cellular automata using neuronal nets.References[1] Halalae, I.: ”Studiul automatelor celulare ca generatoare de zgomot,folosind algoritmi genetici” (The study of CA as noise genrators, using gentical algorithms), PhD thesis, available by direct contact[2] Stefan, Gh.: ”Looking for the lost noise”, CAS '98 Proceedings, Oct. 6 - 10,1998, Sinaia, Romania. p. 579 - 582[3] Wolfram S.: ”Cellular Automata as Simple Self-Organizing Systems”,Caltech preprint CALT-68-938 (1982)[4] Wolfram S.: “Cellular Automata”, Los Alamos Science, 9 (Fall 1983) 2-21[5] Davis L.: Handbook of genetic algorithms, Van Nostrand Reinhold, NewYork, 1991[6] Mitchell M.: An Introduction to Genetic Algorithms, A Bradford Book,The MIT Press, 1999[7] G. Chaitin, “On the length of programs for computing finite binarysequences”, Journal of ACM 13 (1966), p. 547-569[8] Chaitin G.: “On the length of programs for computing finite binarysequences: statistical considerations”, Journal of ACM 16 (1969), p. 145-159[9] Chaitin G.: “A theory of program size formally identical to informationtheory”, Journal of the ACM 22 (1975), pp. 329-340[10] Chaitin G.: Algorithmic Information Theory, 3rd printing, CambridgeUniversity Press, 1990[11] Chaitin G.: “Paradoxes of Randomness”, in Complexity, Vol. 7, No. 5,May/June 2002, pp. 14-21[12] Johnson D.: “A Theoretician's Guide to the Experimental Analysis ofAlgorithms”, AT&T Labs Research, 1996. Available from /¸dsj/papers/exper.ps[13] Borwein J., Borwein P., Girgensohn R, S. Parnes S., “Experimentalmathematics: A discussion”. Mathematical Intelligencer 18, 4 (May 1996),12--18[14] Wolfram S.: “Twenty Problems in the Theory of Cellular Automata”, inPhysica Scripta, T9 (1985) 170-183[15] Wolfram S.: “Random Sequence Generation by Cellular Automata”, inAdvances in Applied Mathematics, 7 (June 1986) 123-169[16] Onicescu, O. ”Estension of the Theory of Probabilities”, in “Logic,Methodology and Philosophy of Science IV, Proceedings of the IVCongres, Bucharest 1971”,[17] Onicescu, O.: Principiile teoriei probabilităţilor, Editura Academiei,Bucureşti, 1969[18] Sahleanu V.: Eseu de biologie informationala, Edit. Stiintifica, Bucuresti,1973。
SCI写作句型汇总
S C I论文写作中一些常用的句型总结(一)很多文献已经讨论过了一、在Introduction里面经常会使用到的一个句子:很多文献已经讨论过了。
它的可能的说法有很多很多,这里列举几种我很久以前搜集的:A.??Solar energy conversion by photoelectrochemical cells?has been intensively investigated.?(Nature 1991, 353, 737 - 740?)B.?This was demonstrated in a number of studies that?showed that composite plasmonic-metal/semiconductor photocatalysts achieved significantly higher rates in various photocatalytic reactions compared with their pure semiconductor counterparts.C.?Several excellent reviews describing?these applications are available, and we do not discuss these topicsD.?Much work so far has focused on?wide band gap semiconductors for water splitting for the sake of chemical stability.(DOI:10.1038/NMAT3151)E.?Recent developments of?Lewis acids and water-soluble organometalliccatalysts?have attracted much attention.(Chem. Rev. 2002, 102, 3641?3666)F.?An interesting approach?in the use of zeolite as a water-tolerant solid acid?was described by?Ogawa et al(Chem.Rev. 2002, 102, 3641?3666)G.?Considerable research efforts have been devoted to?the direct transition metal-catalyzed conversion of aryl halides toaryl nitriles. (J. Org. Chem. 2000, 65, 7984-7989) H.?There are many excellent reviews in the literature dealing with the basic concepts of?the photocatalytic processand the reader is referred in particular to those by Hoffmann and coworkers,Mills and coworkers, and Kamat.(Metal oxide catalysis,19,P755)I. Nishimiya and Tsutsumi?have reported on(proposed)the influence of the Si/Al ratio of various zeolites on the acid strength, which were estimated by calorimetry using ammonia. (Chem.Rev. 2002, 102, 3641?3666)二、在results and discussion中经常会用到的:如图所示A. GIXRD patterns in?Figure 1A show?the bulk structural information on as-deposited films.?B.?As shown in Figure 7B,?the steady-state current density decreases after cycling between 0.35 and 0.7 V, which is probably due to the dissolution of FeOx.?C.?As can be seen from?parts a and b of Figure 7, the reaction cycles start with the thermodynamically most favorable VOx structures(J. Phys. Chem. C 2014, 118, 24950?24958)这与XX能够相互印证:A.?This is supported by?the appearance in the Ni-doped compounds of an ultraviolet–visible absorption band at 420–520nm (see Fig. 3 inset), corresponding to an energy range of about 2.9 to 2.3 eV.B. ?This?is consistent with the observation from?SEM–EDS. (Z.Zou et al. / Chemical Physics Letters 332 (2000) 271–277)C.?This indicates a good agreement between?the observed and calculated intensities in monoclinic with space groupP2/c when the O atoms are included in the model.D. The results?are in good consistent with?the observed photocatalytic activity...E. Identical conclusions were obtained in studies?where the SPR intensity and wavelength were modulated by manipulating the composition, shape,or size of plasmonic nanostructures.?F.??It was also found that areas of persistent divergent surfaceflow?coincide?with?regions where convection appears to be consistently suppressed even when SSTs are above 27.5°C.(二)1. 值得注意的是...A.?It must also be mentioned that?the recycling of aqueous organic solvent is less desirable than that of pure organic liquid.B.?Another interesting finding is that?zeolites with 10-membered ring pores showed high selectivities (>99%) to cyclohexanol, whereas those with 12-membered ring pores, such as mordenite, produced large amounts of dicyclohexyl ether. (Chem. Rev. 2002, 102,3641?3666)C.?It should be pointed out that?the nanometer-scale distribution of electrocatalyst centers on the electrode surface is also a predominant factor for high ORR electrocatalytic activity.D.?Notably,?the Ru II and Rh I complexes possessing the same BINAP chirality form antipodal amino acids as the predominant products.?(Angew. Chem. Int. Ed., 2002, 41: 2008–2022)E. Given the multitude of various transformations published,?it is noteworthy that?only very few distinct?activation?methods have been identified.?(Chem. Soc. Rev., 2009,?38, 2178-2189)F.?It is important to highlight that?these two directing effects will lead to different enantiomers of the products even if both the “H-bond-catalyst” and the?catalyst?acting by steric shielding have the same absolute stereochemistry. (Chem. Soc. Rev.,?2009,?38, 2178-2189)G.?It is worthwhile mentioning that?these PPNDs can be very stable for several months without the observations of any floating or precipitated dots, which is attributed to the electrostatic repulsions between the positively charge PPNDs resulting in electrosteric stabilization.(Adv. Mater., 2012, 24: 2037–2041)2.?...仍然是个挑战A.?There is thereby an urgent need but it is still a significant challenge to?rationally design and delicately tail or the electroactive MTMOs for advanced LIBs, ECs, MOBs, and FCs.?(Angew. Chem. Int. Ed.2 014, 53, 1488 – 1504)B.?However, systems that are?sufficiently stable and efficient for practical use?have not yet been realized.C.??It?remains?challenging?to?develop highly active HER catalysts based on materials that are more abundant at lower costs. (J. Am. Chem.Soc.,?2011,?133, ?7296–7299)D.?One of the?great?challenges?in the twenty-first century?is?unquestionably energy storage. (Nature Materials?2005, 4, 366 - 377?)众所周知A.?It is well established (accepted) / It is known to all / It is commonlyknown?that?many characteristics of functional materials, such as composition, crystalline phase, structural and morphological features, and the sur-/interface properties between the electrode and electrolyte, would greatly influence the performance of these unique MTMOs in electrochemical energy storage/conversion applications.(Angew. Chem. Int. Ed.2014,53, 1488 – 1504)B.?It is generally accepted (believed) that?for a-Fe2O3-based sensors the change in resistance is mainly caused by the adsorption and desorption of gases on the surface of the sensor structure. (Adv. Mater. 2005, 17, 582)C.?As we all know,?soybean abounds with carbon,?nitrogen?and oxygen elements owing to the existence of sugar,?proteins?and?lipids. (Chem. Commun., 2012,?48, 9367-9369)D.?There is no denying that?their presence may mediate spin moments to align parallel without acting alone to show d0-FM. (Nanoscale, 2013,?5, 3918-3930)(三)1. 正如下文将提到的...A.?As will be described below(也可以是As we shall see below),?as the Si/Al ratio increases, the surface of the zeolite becomes more hydrophobic and possesses stronger affinity for ethyl acetate and the number of acid sites decreases.(Chem. Rev. 2002, 102, 3641?3666)B. This behavior is to be expected and?will?be?further?discussed?below. (J. Am. Chem. Soc.,?1955,?77, 3701–3707)C.?There are also some small deviations with respect to the flow direction,?whichwe?will?discuss?below.(Science, 2001, 291, 630-633)D.?Below,?we?will?see?what this implies.E.?Complete details of this case?will?be provided at a?later?time.E.?很多论文中,也经常直接用see below来表示,比如:The observation of nanocluster spheres at the ends of the nanowires is suggestive of a VLS growth process (see?below). (Science, 1998, ?279, 208-211)2. 这与XX能够相互印证...A.?This is supported by?the appearance in the Ni-doped compounds of an ultraviolet–visible absorption band at 420–520 nm (see Fig. 3 inset), corresponding to an energy range of about 2.9 to 2.3 eVB.This is consistent with the observation from?SEM–EDS. (Chem. Phys. Lett. 2000, 332, 271–277)C.?Identical conclusions were obtained?in studies where the SPR intensity and wavelength were modulated by manipulating the composition, shape, or size of plasmonic nanostructures.?(Nat. Mater. 2011, DOI: 10.1038/NMAT3151)D. In addition, the shape of the titration curve versus the PPi/1 ratio,?coinciding withthat?obtained by fluorescent titration studies, suggested that both 2:1 and 1:1 host-to-guest complexes are formed. (J. Am. Chem. Soc. 1999, 121, 9463-9464)E.?This unusual luminescence behavior is?in accord with?a recent theoretical prediction; MoS2, an indirect bandgap material in its bulk form, becomes a direct bandgapsemiconductor when thinned to a monolayer.?(Nano Lett.,?2010,?10, 1271–1275)3.?我们的研究可能在哪些方面得到应用A.?Our ?ndings suggest that?the use of solar energy for photocatalytic watersplitting?might provide a viable source for?‘clean’ hydrogen fuel, once the catalyticef?ciency of the semiconductor system has been improved by increasing its surface area and suitable modi?cations of the surface sites.B. Along with this green and cost-effective protocol of synthesis,?we expect that?these novel carbon nanodots?have potential applications in?bioimaging andelectrocatalysis.(Chem. Commun., 2012,?48, 9367-9369)C.?This system could potentially be applied as?the gain medium of solid-state organic-based lasers or as a component of high value photovoltaic (PV) materials, where destructive high energy UV radiation would be converted to useful low energy NIR radiation. (Chem. Soc. Rev., 2013,?42, 29-43)D.?Since the use of?graphene?may enhance the photocatalytic properties of TiO2?under UV and visible-light irradiation,?graphene–TiO2?composites?may potentially be usedto?enhance the bactericidal activity.?(Chem. Soc. Rev., 2012,?41, 782-796)E.??It is the first report that CQDs are both amino-functionalized and highly fluorescent,?which suggests their promising applications in?chemical sensing.(Carbon, 2012,?50,?2810–2815)(四)1. 什么东西还尚未发现/系统研究A. However,systems that are sufficiently stable and efficient for practical use?have not yet been realized.B. Nevertheless,for conventional nanostructured MTMOs as mentioned above,?some problematic disadvantages cannot be overlooked.(Angew. Chem. Int. Ed.2014,53, 1488 – 1504)C.?There are relatively few studies devoted to?determination of cmc values for block copolymer micelles. (Macromolecules 1991, 24, 1033-1040)D. This might be the reason why, despite of the great influence of the preparation on the catalytic activity of gold catalysts,?no systematic study concerning?the synthesis conditions?has been published yet.?(Applied Catalysis A: General2002, 226, ?1–13)E.?These possibilities remain to be?explored.F.??Further effort is required to?understand and better control the parameters dominating the particle surface passivation and resulting properties for carbon dots of brighter photoluminescence. (J. Am. Chem. Soc.,?2006,?128?, 7756–7757)2.?由于/因为...A.?Liquid ammonia?is particularly attractive as?an alternative to water?due to?its stability in the presence of strong reducing agents such as alkali metals that are used to access lower oxidation states.B.?The unique nature of?the cyanide ligand?results from?its ability to act both as a σdonor and a π acceptor combined with its negativecharge and ambidentate nature.C.?Qdots are also excellent probes for two-photon confocalmicroscopy?because?they are characterized by a very large absorption cross section?(Science ?2005,?307, 538-544).D.?As a result of?the reductive strategy we used and of the strong bonding between the surface and the aryl groups, low residual currents (similar to those observed at a bare electrode) were obtained over a large window of potentials, the same as for the unmodified parent GC electrode. (J. Am. Chem. Soc. 1992, 114, 5883-5884)E.?The small Tafel slope of the defect-rich MoS2 ultrathin nanosheets is advantageous for practical?applications,?since?it will lead to a faster increment of HER rate with increasing overpotential.(Adv. Mater., 2013, 25: 5807–5813)F. Fluorescent carbon-based materials have drawn increasing attention in recent years?owing to?exceptional advantages such as high optical absorptivity, chemical stability, biocompatibility, and low toxicity.(Angew. Chem. Int. Ed., 2013, 52: 3953–3957)G.??On the basis of?measurements of the heat of immersion of water on zeolites, Tsutsumi etal. claimed that the surface consists of siloxane bondings and is hydrophobicin the region of low Al content. (Chem. Rev. 2002, 102, 3641?3666)H.?Nanoparticle spatial distributions might have a large significance for catalyst stability,?given that?metal particle growth is a relevant deactivation mechanism for commercial catalysts.?3. ...很重要A.?The inhibition of additional nucleation during growth, in other words, the complete separation?of nucleation and growth,?is?critical(essential, important)?for?the successful synthesis of monodisperse nanocrystals. (Nature Materials?3, 891 - 895 (2004))B.??In the current study,?Cys,?homocysteine?(Hcy) and?glutathione?(GSH) were chosen as model?thiol?compounds since they?play important (significant, vital, critical) roles?in many biological processes and monitoring of these?thiol?compounds?is of great importance for?diagnosis of diseases.(Chem. Commun., 2012,?48, 1147-1149)C.?This is because according to nucleation theory,?what really matters?in addition to the change in temperature ΔT?(or supersaturation) is the cooling rate.(Chem. Soc. Rev., 2014,?43, 2013-2026)(五)1. 相反/不同于A.?On the contrary,?mononuclear complexes, called single-ion magnets (SIM), have shown hysteresis loops of butterfly/phonon bottleneck type, with negligiblecoercivity, and therefore with much shorter relaxation times of magnetization. (Angew. Chem. Int. Ed., 2014, 53: 4413–4417)B.?In contrast,?the Dy compound has significantly larger value of the transversal magnetic moment already in the ground state (ca. 10?1?μB), therefore allowing a fast QTM. (Angew. Chem. Int. Ed., 2014, 53: 4413–4417)C.?In contrast to?the structural similarity of these complexes, their magnetic behavior exhibits strong divergence.?(Angew. Chem. Int. Ed., 2014, 53: 4413–4417)D.?Contrary to?other conducting polymer semiconductors, carbon nitride ischemically and thermally stable and does not rely on complicated device manufacturing. (Nature materials, 2009, 8(1): 76-80.)E.?Unlike?the spherical particles they are derived from that Rayleigh light-scatter in the blue, these nanoprisms exhibit scattering in the red, which could be useful in developing multicolor diagnostic labels on the basis not only of nanoparticle composition and size but also of shape. (Science 2001,? 294, 1901-1903)2. 发现,阐明,报道,证实可供选择的词包括:verify, confirm, elucidate, identify, define, characterize, clarify, establish, ascertain, explain, observe, illuminate, illustrate,demonstrate, show, indicate, exhibit, presented, reveal, display, manifest,suggest, propose, estimate, prove, imply, disclose,report, describe,facilitate the identification of?举例:A. These stacks appear as nanorods in the two-dimensional TEM images, but tilting experiments?confirm that they are nanoprisms.?(Science 2001,? 294, 1901-1903)B. Note that TEM?shows?that about 20% of the nanoprisms are truncated.?(Science 2001,? 294, 1901-1903)C. Therefore, these calculations not only allow us to?identify?the important features in the spectrum of the nanoprisms but also the subtle relation between particle shape and the frequency of the bands that make up their spectra.?(Science 2001,? 294, 1901-1903)D. We?observed?a decrease in intensity of the characteristic surface plasmon band in the ultraviolet-visible (UV-Vis) spectroscopy for the spherical particles at λmax?= 400 nm with a concomitant growth of three new bands of λmax?= 335 (weak), 470 (medium), and 670 nm (strong), respectively. (Science 2001,? 294, 1901-1903)E. In this article, we present data?demonstrating?that opiate and nonopiate analgesia systems can be selectively activated by different environmental manipulationsand?describe?the neural circuitry involved. (Science 1982, 216, 1185-1192)F. This?suggests?that the cobalt in CoP has a partial positive charge (δ+), while the phosphorus has a partial negative charge (δ?),?implying?a transfer of electron density from Co to P.?(Angew. Chem., 2014, 126: 6828–6832)3. 如何指出当前研究的不足A. Although these inorganic substructures can exhibit a high density of functional groups, such as bridging OH groups, and the substructures contribute significantly to the adsorption properties of the material,surprisingly little attention has been devoted to?the post-synthetic functionalization of the inorganic units within MOFs. (Chem. Eur. J., 2013, 19: 5533–5536.)B.?Little is known,?however, about the microstructure of this material. (Nature Materials 2013,12, 554–561)C.?So far, very little information is available, and only in?the absorber film, not in the whole operational devices. (Nano Lett.,?2014,?14?(2), pp 888–893)D.?In fact it should be noted that very little optimisation work has been carried out on?these devices. (Chem. Commun., 2013,?49, 7893-7895)E. By far the most architectures have been prepared using a solution processed perovskite material,?yet a few examples have been reported that?have used an evaporated perovskite layer. (Adv. Mater., 2014, 27: 1837–1841.)F. Water balance issues have been effectively addressed in PEMFC technology through a large body of work encompassing imaging, detailed water content and water balance measurements, materials optimization and modeling,?but very few of these activities have been undertaken for?anion exchange membrane fuel cells,? primarily due to limited materials availability and device lifetime. (J. Polym. Sci. Part B: Polym. Phys., 2013, 51: 1727–1735)G. However,?none of these studies?tested for Th17 memory, a recently identified T cell that specializes in controlling extracellular bacterial infections at mucosal surfaces. (PNAS, 2013,?111, 787–792)H. However,?uncertainty still remains as to?the mechanism by which Li salt addition results in an extension of the cathodic reduction limit. (Energy Environ. Sci., 2014,?7, 232-250)I.?There have been a number of high profile cases where failure to?identify the most stable crystal form of a drug has led to severe formulation problems in manufacture. (Chem. Soc. Rev., 2014,?43, 2080-2088)J. However,?these measurements systematically underestimate?the amount of ordered material. ( Nature Materials 2013, 12, 1038–1044)(六)1.?取决于a.?This is an important distinction, as the overall activity of a catalyst will?depend on?the material properties, synthesis method, and other possible species that can be formed during activation.?(Nat. Mater.?2017,16,225–229)b.?This quantitative partitioning?was determined by?growing crystals of the 1:1 host–guest complex between?ExBox4+?and corannulene. (Nat. Chem.?2014,?6177–178)c.?They suggested that the Au particle size may?be the decisive factor for?achieving highly active Au catalysts.(Acc. Chem. Res.,?2014,?47, 740–749)d.?Low-valent late transition-metal catalysis has?become indispensable to?chemical synthesis, but homogeneous high-valent transition-metal catalysis is underdeveloped, mainly owing to the reactivity of high-valent transition-metal complexes and the challenges associated with synthesizing them.?(Nature2015,?517,449–454)e.?The polar effect?is a remarkable property that enables?considerably endergonic C–H abstractions?that would not be possible otherwise.?(Nature?2015, 525, 87–90)f.?Advances in heterogeneous catalysis?must rely on?the rational design of new catalysts. (Nat. Nanotechnol.?2017, 12, 100–101)g.?Likely, the origin of the chemoselectivity may?be also closely related to?the H?bonding with the N or O?atom of the nitroso moiety, a similar H-bonding effect is known in enamine-based nitroso chemistry. (Angew. Chem. Int. Ed.?2014, 53: 4149–4153)2.?有很大潜力a.?The quest for new methodologies to assemble complex organic molecules?continues to be a great impetus to?research efforts to discover or to optimize new catalytic transformations. (Nat. Chem.?2015,?7, 477–482)b.?Nanosized faujasite (FAU) crystals?have great potential as?catalysts or adsorbents to more efficiently process present and forthcoming synthetic and renewablefeedstocks in oil refining, petrochemistry and fine chemistry. (Nat. Mater.?2015, 14, 447–451)c.?For this purpose, vibrational spectroscopy?has proved promising?and very useful.?(Acc Chem Res. 2015, 48, 407–413.)d.?While a detailed mechanism remains to be elucidated and?there is room for improvement?in the yields and selectivities, it should be remarked that chirality transfer upon trifluoromethylation of enantioenriched allylsilanes was shown. (Top Catal.?2014,?57: 967.?)e.?The future looks bright for?the use of PGMs as catalysts, both on laboratory and industrial scales, because the preparation of most kinds of single-atom metal catalyst is likely to be straightforward, and because characterization of such catalysts has become easier with the advent of techniques that readily discriminate single atoms from small clusters and nanoparticles. (Nature?2015, 525, 325–326)f.?The unique mesostructure of the 3D-dendritic MSNSs with mesopore channels of short length and large diameter?is supposed to be the key role in?immobilization of active and robust heterogeneous catalysts, and?it would have more hopeful prospects in?catalytic applications. (ACS Appl. Mater. Interfaces,?2015,?7, 17450–17459)g.?Visible-light photoredox catalysis?offers exciting opportunities to?achieve challenging carbon–carbon bond formations under mild and ecologically benign conditions. (Acc. Chem. Res.,?2016, 49, 1990–1996)3. 因此同义词:Therefore, thus, consequently, hence, accordingly, so, as a result这一条比较简单,这里主要讲一下这些词的副词词性和灵活运用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Information-Theoretic Bounds for Mobile Ad-hoc Networks Routing ProtocolsNianjun Zhou and Alhussein A.AbouzeidDept of Electrical,Computer and Systems EngineeringRensselaer Polytechnic InstituteTroy,New York12180,USA{zhoun,abouza}@Abstract.In this paper,we define the routing overhead as the amountof information needed to describe the changes in a network topology.Wederive a universal lower bound on the routing overhead in a mobile ad-hoc network.We also consider a prediction-based routing protocol thatattempts to minimize the routing overhead by predicting the changes inthe network topology from the previous mobility pattern of the nodes.We apply our approach to a mobile ad-hoc network that employs a dy-namic clustering algorithm,and derive the optimal cluster size that min-imizes the routing overhead,with and without mobility prediction.Webelieve that this work is a fundamental and essential step towards therigorous modeling,design and performance comparisons of protocols forad-hoc wireless networks by providing a universal reference performancecurve against which the overhead of different routing protocols can becompared.1IntroductionResearch on distributed multi-hop wireless networks,also known as wireless ad-hoc networks[1]has evolved from DARPA packet radio program during the early1970’s[2].Since wireless ad-hoc networks can be deployed rapidly in a non-organized(i.e.ad-hoc)fashion without requiring any existing infrastructure, they are expected tofind applications in a number of diverse settings[3,4].Much of the research in the area of ad-hoc networks has focused on developing routing protocols.Proactive routing protocols(e.g.[5,6,7])attempt to compute paths in advance and determine them continuously so that a route is readily available when a packet needs to be forwarded.Reactive routing protocols(e.g. [8,9,10])are based on a source initiated query/reply process and typically rely on theflooding of queries for route discovery.A network with a few relatively fast moving nodes favors reactive protocols while a network with many slowly moving nodes favors proactive protocols.The two strategies are combined in routing scheme.Hierarchical routing schemes based on the formation of a virtual backbone are developed in[12,13]. Correspondence Author:Alhussein A.Abouzeid,Rensselaer Polytechnic Institute, 110Eighth St,JEC-6038,Troy NY12180Tel:(518)276-6534,Fax:(518)276-4403H.-K.Kahng(Ed.):ICOIN2003,LNCS2662,pp.651–661,2003.c Springer-Verlag Berlin Heidelberg2003652Nianjun Zhou and Alhussein A.AbouzeidThe main advantage of hierarchal routing is that it overcomes scalability prob-lems by designating a node within a group of nodes to be responsible for routing, and thus only these nodes need to maintain routing information about the rest of the network.The main disadvantage is the overhead in the cluster mainte-nance operations(i.e.joining and leaving the clusters)which mainly depend on the degree of mobility of the nodes.This paper considers proactive hierarchal routing protocols.Considerable effort has been directed towards evaluating routing protocols [14,15,16,17,18,19,20,21].The procedure of evaluation relies on simulations of the protocol and comparing its performance against other existing protocols.There is a need for a universal reference performance curve that can tell us how good(or bad)the performance of a specific protocol really is.In coding the-ory,a channel coding algorithm is good if it achieves the Shannon capacity[22]. Similarly,we seek to derive a universal curve against which we can measure how good a routing protocol performs,in terms of minimizing the routing overhead, which is the amount of information needed to describe the changes in a dynamic network topology.Up to our knowledge,this paper is thefirst that attempts to derive a theoretical lower bound on the routing overhead of ad-hoc network pro-tocols.Related work in[23,24]do not consider the routing overhead in deriving the capacity of wireless networks.2Network Model2.1AssumptionsWe make the following assumptions about the network:(A1)The mobile nodes are identical;(A2)The mobile nodes are distinguishable;(A3)The number of mobile nodes in the network isfixed,denoted by N;(A4)The communica-tion region of interest isfixed and bounded.A1means that all the nodes have the same physical characteristics.A2means that each node is addressable by a node unique identifier-which we denote as NUI.Furthermore,We assume that the statistical node mobility patterns of individual nodes are independent and known.In this paper,we allow any type of mobility model as long as it allows a formulation using Markov chains.Regarding the self-organization of the network and the geographic distribu-tion of the nodes,the model can be viewed as a two-level abstraction.We assume that nodes move freely within a bounded region of space.The whole region is divided into sub-regions.For this preliminary work,we assume the number of sub-regions isfixed.There are two levels of hierarchy for nodes.Each region has its unique identifier-RUI.All the nodes of a sub-region form a cluster and a cluster head,which we call routing node.Routing node is selected at random from the nodes within the sub-region.It is possible that a sub-region becomes empty and thus will not have a cluster or a cluster head.The nodes belonging to the same sub-region communicate directly.The nodes belonging to different sub-regions communicate through the routing nodes.Thus,only two modes of direct(i.e.single-hop)communication are permissible:nodes within the same sub-region,and routing nodes of neighboring sub-regions(See Figure1).Information-Theoretic Bounds653Fig.1.A snapshot of the network topology.Blue(dark)nodes are routing nodes.There is one routing node in every sub-region.Sub-regions do not have to be rectangular or identical2.2DefinitionsFor clarity of presentation,we provide the formal definition of the terms used in the paper as follows.Routing Node:The cluster head for a sub-region, assumed to be selected randomly from the set of nodes that belong to the sub-region.There is only one routing node for a sub-region.If a routing node leaves a sub-region,a new routing node is selected from the remaining nodes in the same sub-region.Each routing node has an RUI associated with it;Regular Node: a node that is not currently a routing node.Any regular node can be selected as a routing node;Topology:is the connectivity relationship of the nodes as depicted in Figure1.Due to the dynamic behavior of the topology,it can be de-scribed as an instance of a random graph.An edge exists between two arbitrary nodes if single-hop communication between those two nodes is admissible,ac-cording to the rules presented earlier.Due to the mobility of the nodes,the edge of two nodes can be established or torn down randomly;Global Topology:The topology of the whole network.Local Topology:The topology of a sub-region; Topologies Cardinality:The total number of the topologies.The cardinality of the network topologies is used to calculate the minimum amount of infor-mation needed to describe a network snapshot without any extra knowledge; Information Overhead:The bits needed to distinguish one topology from another.3AnalysisAny algorithm for solving some problem must do some minimal amount of work. The most useful principle of this kind is that the outcome of a comparison between two items contains at most one bit of information.Hence,if there are m possible input strings,and an algorithm purports to identify which one it was given solely on the basis of comparisons between input symbols,then log2m comparisons are needed(all logarithms in this paper are base2and hence we will shortly write log instead of log2).This is because log m bits are necessary to specify one of the m possibilities[25].654Nianjun Zhou and Alhussein A.Abouzeid3.1Outline and NotationIn this section,we apply the above principle to derive a lower bound on the overhead of proactive hierarchal routing protocols withfixed number of clusters in a mobile wireless ad-hoc network.The steps followed are as follows:(a)Com-pute the number of different topologies possible for each local sub-region and for the whole network.These are termed local topologies cardinality and global topologies cardinality,and are denoted by denoted L and G,respectively;(b) Derive expressions for h,the average holding time for a node within a sub-region, and for H,the average holding time before a topology change;(c)Compute the minimum amount of information needed to keep track of the topology changes using the individual local information from the different sub-regions I L and from the global view of the network I G.(d)Finally,consider the effect of predicting the future locations of the nodes based on their mobility on the local I P L and global I P G routing overhead.3.2Cardinalities of Global and Local Network TopologiesTheorem1:Consider N mobile nodes randomly distributed over M sub-regions.Choose a routing node for each non-empty sub-region randomly from the set of nodes belonging to the sub-region.The total number of possible topologies is given by:G=min(N,M)i=1N!M!i!(M−i)!(N−i)!i N−i(1)Proof1:See Appendix.Theorem2:Consider N mobile nodes randomly distributed over M sub-regions, then the total number of local topologies for a given sub-region is:L=(2N−1)N+1(2) Proof:See Appendix.3.3Inferring Network Topology Dynamicsfrom Individual Node MobilityWe consider the following simple Markov mobility model.For a given time-stepτ,we assume that2the probability that a mobile node will stay in the same sub-region is0≤p0≤1,and leave its current sub-region is1−p0.We further assume that a node moves to any of the K neighboring nodes with equal1The result can be verified using a simple example with N=4and M=2,where it is easy to show using manual calculation that the total combination is56,which is the same as the result from(1).2This model follows from discretizing a continuous-time two-dimensional Markov pro-cess description of the individual node mobility.Information-Theoretic Bounds 655probability (random walk)1−p 0K .Thus,the probability distribution function ofthe node holding time at the same sub-region is geometric.For a given node,the mean holding time h =p 01−p 0.Since the individual nodes move independently,The probability p 1that a spe-cific topology does not change is equal to the probability that all nodes do not change their sub-regions.Assuming independent node mobility,p 1=p N 0.Hence,the average holding time for a topology is thusH =∞i =1i (1−p 1)p i 1=p 11−p 1=p N 01−p N 0(3)3.4Routing Overhead without Mobility PredictionThe information needed to identify a specific network topology from the set of all the possible topologies is the entropy of the set.Global Topology without Prediction:From (1)I G =log (G )(4)Since we do not have any knowledge of the topology probability distribution,we use the maximum entropy method [26]to infer it.From the proof of Theo-rem 1,we have shown that for a distribution r =(r 1,r 2,...,r M )of nodes for each sub-region,the total number of possible topologies isn (r,N )=N !r 1!r 2!...r M !M i =1g (r i )with M i =1r i =N (5)We have also shown that M i =1g (r i )reaches its maximum value when r =(r 1,r 2,...,r M )has a uniform distribution.In this casen (r,N )≤N !r 1!r 2!...r M ! N MM (6)It is easy to show after some algebraic manipulations thatM N ≤G ≤ N MM M N (7)and equivalently N log M ≤I G ≤N log M +M log N M(8)The result (8)can be interpreted as follows.The lower bound in (8)is the minimum information needed to describe the network without identifying which nodes are the routing nodes.The introduction of routing nodes increases the complexity of the network by M log N M .656Nianjun Zhou and Alhussein A.AbouzeidLocal Topology without Prediction:The entropy of a specific sub-region is log L.From(2),the sum of the information overhead required to maintain each of the local topologies,I L,is,I L=M log(2N−1N+1)(9) where the“M”coefficient comes from the fact that there are M local topologies.For large N,lim N→∞log(2N−1N+1)N=1(10)and henceI L≈MN;N 1(11)From(8)and(11),I L I G ≈Mlog M;N 1(12)A comment on the above result(12)is in order.It states that,in the limit N→∞,I L>I G(i.e.the sum of the entropies of the local topologies is larger than the entropy computed directly from the global network topology).The reason is that I G assumes the knowledge of N and M when computing the different possible topologies,while I L computes the local topology information locally(independent of the node distribution over the rest of the sub-regions) even though the local topologies of different sub-regions are not independent(a node may not exist in two different sub-regions).3.5Routing Overhead with Mobility PredictionGlobal topology with Prediction:The information needed to update the new location of a node(i.e.which sub-region it belongs to)given the knowledgeof the current location isI=−1p0log p0+(1−p0)log(1−p0K)(13)and henceNI≤I P G≤NI+M log NM(14)When p0=1/(K+1),I reaches its maximum value.From(8)and(14),I P G I G ≤log(K+1)log M;N>>1(15)For many practical scenarios,even the largest number of neighboring sub-regions is usually less than the total number of sub-regions.In this case,for large N,the above result states that using prediction to update the topology information will result in large savings in the routing overhead.Information-Theoretic Bounds657Fig.2.Minimum information over-head with and without prediction.M =5,p 0=0.9,k =3Fig.3.Minimum information over-head,with prediction.N =100,q =0.5,p 0=0.9and k =3.Op-timal number of sub-regions is 4Local Topology with Prediction:Assuming each node is equally likely tobelong to any of the sub-regions with probability 1M ,I P L ≤−MN 1M log 1M +(1−1M )log(1−1M) +M log N (16)Note that M log N bits are needed to specify the routing node for the cluster.For large M ,it is easy to show after some mathematical manipulations that,I P L ≤N log M +M log N ;M 1(17)From (11)and (17),I P L I L ≤N log M +M log N NM ;M 1;N 1(18)4Numerical Results and ApplicationsIn this section,we show some numerical results from the bounds derived in the previous section as well as an application of these bounds in finding the optimal number of sub-regions that minimizes the information overhead.Figure 2shows a numerical example for the lower bound on the routing over-head with and without prediction.Clearly,large amount of savings is achieved with prediction.Let q denote the probability that two arbitrary communicating nodes be-long to the same cluster.Let O (O P )denote the minimum routing overhead without(with)prediction.Then,O =q I L M +(1−q )I G (19)658Nianjun Zhou and Alhussein A.Abouzeid without prediction andO P=q I P LM+(1−q)I P G(20)Figure3depicts the results for an arbitrary network.Thefigure shows the op-timal number of sub-regions which is the one that requires the least amount of information exchange.Decreasing the number of sub-regions M increases the information overhead in maintaining the local cluster topology(more nodes per cluster)while increasing the number of sub-regions increases the overhead in maintaining the inter-cluster(global)topology,and the optimal point represents the balance between those two opposing factors.5ConclusionThis paper presented an information-theoretic approach to the analysis of rout-ing protocols.We applied the framework to derive lower bounds on the routing overhead in a mobile ad-hoc network,with and without mobility prediction.We quantified the amount of overhead needed for clustering,and also the amount of savings.By combining both,wefind the optimum number of clusters that min-imize the routing overhead.A number of future avenues of work remain.Due to the distributed nature of the network,the local topology information will be exchanged and used to infer the global network topology.Therefore,the mecha-nism in which the local topology information will be exchanged is an important topic that has not been addressed in this paper.Including this aspect may result in a tighter lower bound(i.e.a curve that is“above”the one derived in this paper).References[1]Z.J.Haas et al.eds.Wireless ad hoc networks.IEEE Journal on Selected Areasin Communications,17(8),August1999.[2]J.Jubin and J.D.Tornow.The DARPA packet radio network protocols.Pro-ceedings of the IEEE,75(1),1987.[3] D.L.Estrin et al.Embedded Everywhere:A research agenda for networked systemsof embedded computers.National Research Council,2001..[4]I.F.Akyildiz,W.Su,Y.Sankarasubramaniam,and E.Cayirci.Wireless sensornetworks:A puter Networks(Elsevier),38(4):393–422,March2002.[5] C.E.Perkins and P.Bhagwat.Highly dynamic Destination-Sequenced Distance-Vector routing(DSDV)for mobile computers.In Proceedings of ACM SIG-COMM’94,pages234–44,London,United Kingdom,October1994.[6]P.Jacquet,P.Muhlethaler,and A.Qayyum.Optimized link state routing proto-col.IETF MANET,Internet Draft,November1998.[7]S.Murthy and J.J.Garcia-Luna-Aceves.A routing protocol for packet radionetworks.In Proceedings of ACM International Conference on Mobile Computing and Networking(MOBICOM’95),pages86–94,Berkeley,CA,USA,December 1995.Information-Theoretic Bounds659 [8]V.D.Park and M.S.Corson.A highly adaptive distributed routing algorithm formobile wireless networks.In Proceedings of IEEE INFOCOM’97,volume3,pages 1405–13,Kobe,Japan,April1997.[9] D.B.Johnson and D.A.Maltz.Dynamic source routing in ad hoc wireless net-working.In T.Imielinski and H.Korth,editors,Mobile Computing.Kluwer,1996.[10] C.E.Perkins and E.M.Royer.Ad hoc on-demand distance vector routing.InProceedings of IEEE Workshop on Mobile Computing Systems and Applications (WMCSA’99),pages90–100,New Orleans,LA,USA,February1999.[11]M.R.Pearlman and Z.J.Haas.Determining the optimal configuration for thezone routing protocol.IEEE Journal on Selected Areas in Communications, 17(8):1395–414,August1999.[12] B.Das,R.Sivakumar,,and V.Bharghavan.Routing in ad hoc networks usinga spine.In Proceedings of International Conference on Computer Communicationsand Networks,pages34–9,Las Vegas,NV,USA,September1997.[13] B.Das,R.Sivakumar,,and V.Bharghavan.Routing in ad-hoc networks usingminimum connected dominating sets.In Proceedings of International Confer-ence on Communications(ICC’97),volume2,pages765–9,Montreal,Canada, September1997.[14]S.Ramanathan and M.Steenstrup.A survey of routing techniques for mobilecommunications networks.Journal of Special Topics in Mobile Networks and Applications(MONET),1(2):89–104,October1996.[15] E.Royer and C.-K.Toh.A review of current routing protocols for ad-hoc mobilewireless networks.IEEE Personal Communications Magazine,pages46–55,April 1999.[16]J.-C.Cano and P.Manzoni.A performance comparison of energy consumptionfor mobile ad hoc network routing protocols.In Proceedings of8th International Symposium on Modeling,Analysis and Simulation of Computer and Telecommu-nication Systems(MASCOTS),pages57–64,San Francisco,CA,USA,August 2000.[17]S.R.Das,R.Castaneda,and Yan Jiangtao.Simulation-based performance eval-uation of routing protocols for mobile ad hoc networks.Mobile Networks and Applications,5(3):179–89,2000.[18] C.E.Perkins,E.M.Royer,S.R.Das,and M.K.Marina.Performance compar-ison of two on-demand routing protocols for ad hoc networks.IEEE Personal Communications,8(1):16–28,February2001.[19] A.Boukerche.A simulation based study of on-demand routing protocols for ad hocwireless networks.In Proceedings of IEEE34th Annual Simulation Symposium, pages85–92,Seattle,WA,USA,April2001.[20] C.-K.Toh,H.Cobb,and D.A.Scott.Performance evaluation of battery-life-aware routing schemes for wireless ad hoc networks.In Proceedings of IEEE International Conference on Communications(ICC),volume9,pages2824–9, Helsinki,Finland,June2001.[21] A.Nasipuri,R.Burleson,B.Hughes,and J.Roberts.Performance of a hybridrouting protocol for mobile ad hoc networks.In Proceedings Tenth International Conference on Computer Communications and Networks,pages296–302,Scotts-dale,AZ,USA,October2001.[22] C.E.Shannon.A mathematical theory of communication(2parts).Bell SystemTechnical Journal,27:379–423,623–56,July and October1948./cm/ms/what/shannonday/shannon1948.pdf.[23]P.Gupta and P.R.Kumar.The capacity of wireless networks.IEEE Transactionson Information Theory,46(2):388–404,March2000.660Nianjun Zhou and Alhussein A.Abouzeid[24]M.Grossglauser and J.Bolot.On the relevance of long range dependence innetwork traffic.IEEE/ACM Transactions on Networking ,7(5):629–40,October 1999.[25] B.Weide.A survey of analysis techniques for discrete algorithms.ACM Comput-ing Surveys ,9(4):291–313,December 1977.[26] A.Papoulis and S.U.Pillai.Probability,Random Variables and Stochastic Pro-cesses .Cambrige studies in advanced mathematics.McGraw-Hill,4th.edition,2002.Appendix:Proof of TheoremsProof of Theorem1First,consider the case N ≥M .Let r =(r 1,r 2,...,r M )denote a specific organization of the nodes over the sub-regions.Then the pos-sible topologies for this case isn (r,N )=N !r 1!r 2!...r M !M i =1g (r i )where g (r )=r ∀r >0and g (0)=1.The function g (r )follows from the fact that we have r different ways of selecting a routing node for each subregion.Let R denote the set of all possible organizations of the nodes.Letf (x 1,x 2,...,x M )=(x 1+x 2+···+x M )N = r ∈R N !r 1!r 2!...r M !x r 11x r 22...x r M M (21)The total number of topologies in which there are no empty sub-regions can be calculated by taking the partial derivative of (21)w.r.t x i and then setting x i =1,which yields N !(N −M )!M N −M (22)Consider now that there is a single empty sub-region s .Then the total number of topologies can be calculated by taking the partial derivative of (21)w.r.t x i and then set x i =1∀i =s and x s =0,which yields N !(N −M +1)! M N −M +1(23)And since there are M 1ways of having a single empty sub-region,the total number of topologies with a single sub-region is thus M !1!(M −1)! N !(N −M +1)!M N −M +1(24)By induction,the number of topologies with exactly i empty sub-regions is M !i !(M −i )! N !(N −M +i )! M N −M +i ;0≤i ≤M −1(25)Information-Theoretic Bounds661 Summing over all i yields the result.Similar derivation applies for the case N<M(but notice in this case that the number of empty sub-regions will range from M−N to M−1).Proof of Theorem2Let r be the number of nodes in the sub-region.The total number of possible topologies is thusL=Nr=0N!r!(N−r)!g(r)(26)where g(r)has been defined in the proof of Theorem1(above).Letf(x1,x2)=(x1+x2)N=Nr=0N!r!(N−r)!x r1x N−r2Taking the partial derivative of both sides w.r.t x1,then setting x1=x2=1 yieldsN2N−1=Nr=1N!r!(N−r)!g(r)For the trivial case r=0(no nodes in the sub-region,there is only one possible topology.。