面向集装箱码头物流系统的仿真优化研究
自动化仓储物流系统的可视化仿真与优化研究

自动化仓储物流系统的可视化仿真与优化研究摘要:本文基于3D物流仿真技术,针对一种兼具出入库及分拣功能、采用道岔堆垛机的自动化立体仓储物流系统进行了仿真与研究,并针对仿真结果对该立库系统的控制逻辑进行了优化。
关键词:智能物流、3D仿真、优化2023年中国明确提出2030年“碳达峰”与2060年“碳中和”的目标。
基于此目标,一大批新能源企业如雨后春笋般蓬勃发展起来。
原料库、极片库和化成分容库作为新能源企业实现自动化储存、物流和生产的三种重要的自动化立体仓库,其设备布局和系统控制策略合理与否、流量能否满足生产需求,直接影响到新能源企业的产能和发展。
本文基于物流系统的3D建模仿真技术对某原料库物流系统进行了仿真分析,并对自动仓储控制逻辑进行了优化。
一、新能源企业原料库基本描述本文所分析的原始模型是坐落于某南亚国家的新能源企业工厂的原材料自动化立体仓库物流系统。
该立库系统集合了原料及母托盘垛入库、原料整托出库、原料分拣回库、分拣原料出库和盘点等功能,该立库的鸟瞰图如图1所示,图中展示了其各个功能分区。
图1新能源原料库鸟瞰图由于该立库需要储存的不同原料采用了多种尺寸的托盘,所以在储存过程中,利用相同尺寸的塑料母托盘作为库内周转载具。
由于原料库的流量需求并不高,仅为:入库50盘/小时,拣选20盘/小时,出库50盘/小时,所以为了节约成本、方便维修并实现堆垛机的可替换性,立库中8个巷道共用4台道忿式堆垛机,在库尾实现巷道切换功能,见图2。
图2道岔堆垛机该存储系统的输送设备包括:辐道机、链条机、顶升移载机、转台、牙叉升降机、子母托盘自动组盘机以及拆叠盘机,以实现子母托盘自动组盘入库、自动拆盘出库,母托盘自动供给、母托盘垛回收以及人工拣选等功能。
各主要流程的物流流向如图3所示。
图3各流程物流流向示意图(a)入库流程(b)出库拣选流程(c)拣选入库流程(d)出库流程该存储系统的8个巷道分为A、B、C三个区,分别存储辅料、极片和隔离膜/极片,如图4所示。
物流系统仿真研究综述
物流系统仿真研究综述物流系统仿真研究综述随着全球化趋势的加强和市场竞争日益激烈,物流的重要性愈发凸显。
物流系统的运作效率和优化已成为许多企业关注的焦点。
为了满足复杂多变的物流需求,提高物流系统的运作效能,研究人员开始使用仿真技术来模拟和分析物流系统。
本文将对物流系统仿真研究进行综述,旨在了解目前的研究成果、应用领域以及未来的发展趋势。
一、物流系统仿真的定义和特点物流系统仿真是指通过建立一个虚拟的物流系统模型,并在此基础上进行各种操作、流程和决策的模拟与评估。
仿真模型可以反映物流系统中的各项变量和参数,使决策者能够准确地评估不同方案的效果和影响。
物流系统仿真具有以下特点:1. 模型的可靠性:通过仿真模型可以准确地表示现实中的物流系统,根据实际数据构建的模型能够提供可靠的仿真结果。
2. 灵活性:仿真模型使决策者能够灵活地测试和模拟不同的操作方案和决策策略,从而提高物流系统的运营效率。
3. 成本效益:与实际物流系统的试运行相比,仿真技术可以大大降低成本和风险,同时提供准确的评估结果。
二、物流系统仿真的应用领域物流系统仿真技术可以在多个领域中应用,以下列举了几个主要的应用领域:1. 运输优化:通过仿真模型可以评估不同的运输方案,在各种变量和参数的影响下优化物流运输的时间、成本和资源利用率。
2. 仓储管理:通过仿真模型可以分析和优化仓库的布局、存货管理和库存控制策略,提高仓储效率和减少库存成本。
3. 供应链协调:仿真模型可以帮助企业评估和分析不同的供应链策略,定位瓶颈和优化供应链流程,提高供应链的效率和灵活性。
三、物流系统仿真的发展趋势物流系统仿真研究在过去几十年中取得了显著的发展,但仍存在一些挑战和改进空间,以下是未来发展的几个趋势:1. 软件技术的发展:随着计算机技术和软件工具的不断进步,物流系统仿真将更加便捷和高效,使得模拟和评估结果更加准确和可靠。
2. 数据采集和分析:仿真模型的准确性和可靠性取决于模型所依赖的数据。
仿真实验报告模板

AGV任务分配与充电配置选择模型1、作业流程描述在集装箱码头的AGV作业流程:首先系统根据当前作业情况进行判断,若此时无运输任务,AGV进入休息区等待;若存在运输任务,则判断当前处于工作状态的AGV数量是否足够;若不足,则将非工作AGV组中的AGV分配至工作组。
当AGV完成一次运输作业后会对自身电量进行判断,若此时电量高于30%,则继续进行运输作业;若此时电量低于30%,则前往充电桩充电。
确立仿真参数的输入,确立任务数,AGV数量,自动充电桩数量,充电桩充电速度,AGV最低充电阈值(30%),AGV电量充足阈值(80%)。
2、仿真目标设置本文的仿真目标是设计和实施一个集装箱自动化码头作业流程的仿真模型,并评估其中的AGV充电任务调度策略。
具体而言,仿真目标包括以下几个方面:首先,模拟进口箱作业流程:建立一个真实的模拟环境,包括岸桥提取进出口箱、AGV小车水平运输等环节,以准确模拟进口箱的作业流程。
其次,实现AGV充电任务调度:开发一个高效的AGV充电任务调度算法,考虑到AGV的电池寿命和电量状态,以最小化充电任务的时间和成本。
该算法将基于实时的作业需求和AGV的可用状态进行智能调度,以保证作业流程的平稳运行。
再次,评估作业效率和成本:通过仿真模型,分析和比较不同的AGV充电任务调度策略对作业效率和成本的影响。
使用实际数据和性能指标,如作业时间、能源消耗和人力成本等,对各种策略进行定量评估,并找到最佳的调度策略。
最后,提出优化建议,在自动化集装箱码头作业流程中,合理的充电桩布局可以显著提升AGV充电任务的效率和整体作业流程的顺畅性。
分析作业热点区域:通过对集装箱作业流程中的瓶颈区域和高频度作业区域进行分析,确定作业热点区域。
这些区域通常是集装箱堆场附近、码头入口/出口以及岸桥与AGV交接点等位置。
准确定位热点区域可以帮助本文合理布置充电桩,以满足高负荷作业需求。
考虑AGV行驶距离和电池寿命:根据AGV的行驶距离和电池寿命特性,合理分析AGV的电池续航能力。
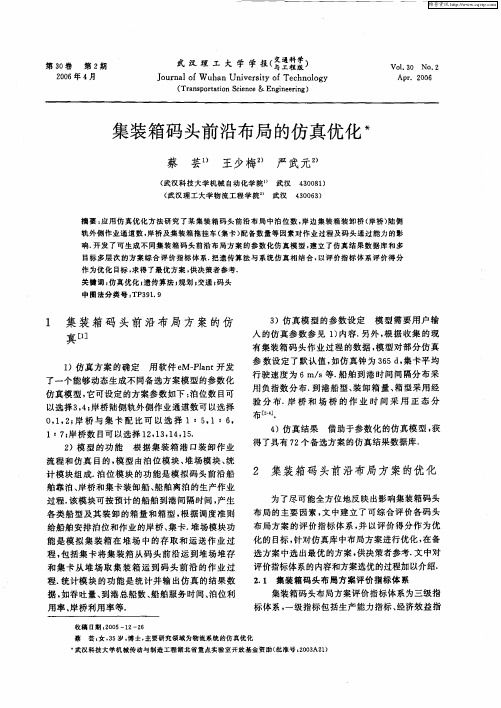
集装箱码头前沿布局的仿真优化
’ 武汉科技 大学机械传动与制造工程 湖北 省重点实验 室开 放基 金资助( 准号 t0 3 2 ) 批 20 A 1
维普资讯
第 2期
蔡
芸等 ; 集装 箱码头前 沿布局的仿真优化
・3 7・ 2
标和设备利用率及生产效率指标. 根据国内外港
口设 计 的资 料 , 中采 用 的 各 级 指标 内容及 其 默 文
和 集 卡 从 堆 场 取 集 装 箱 运 到 码 头 前 沿 的作 业 过 程 . 计模 块 的功 能是 统 计 并 输 出仿 真 的结 果 数 统 据 , 吞 吐量 、 如 到港 总船数 、 舶服 务 时 间 、 船 泊位 利
布局方案 的评价指标体系, 以评价得分作为优 并 化 的目标 , 针对仿真库中布局方案进行优化 , 在备 选方案中选出最优的方案, 供决策者参考. 中对 文 评价指标体系的内容和方案选优的过程加以介绍.
流 程 和仿 真 目的 , 型 由泊 位 模 块 、 场 模 块 、 模 堆 统 计 模 块组 成 . 位模 块 的功 能 是 模 拟 码 头前 沿 船 泊
2 集 装 箱 码 头 前 沿 布 局 方 案 的优 化
为 了尽 可 能全 方位地 反 映 出影 响集装箱 码 头 布局 的 主要 因素 , 中建 立 了可 综 合 评 价各 码 头 文
摘 要 t 用仿 真优 化方 法研 究了某集装 箱码 头前 沿布 局中泊位 数 , 边集装 箱装卸桥 ( 应 岸 岸桥 ) 陆侧 轨外 侧作业通道数 , 岸桥及集装 箱拖挂车 ( 集卡 ) 配备 数量等因素对 作业过程及码 头通过能 力的影 响 . 发了可 生成不 同集装箱 码头前沿 布局方 案 的参 数化仿 真模型 , 开 建立 了仿真结果 数据库 和多 目标多层 次 的方 案综合 评价指标 体 系. 把遗传 算法 与系统仿 真相结合 , 以评 价指标体 系评价得 分
基于Flexsim的集装箱码头物流作业系统建模与仿真
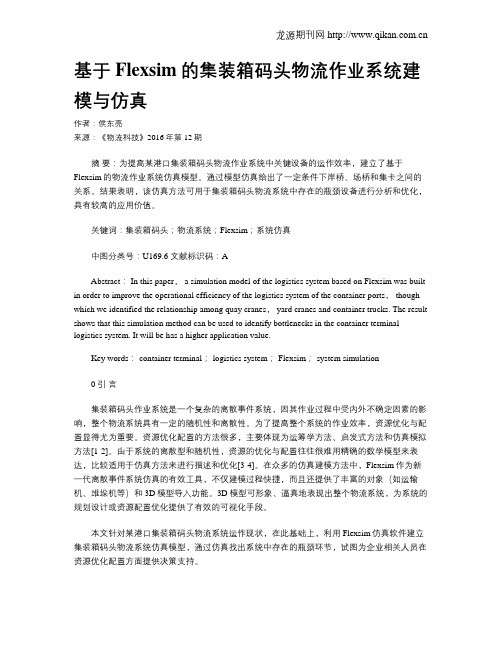
基于Flexsim的集装箱码头物流作业系统建模与仿真作者:侯东亮来源:《物流科技》2016年第12期摘要:为提高某港口集装箱码头物流作业系统中关键设备的运作效率,建立了基于Flexsim的物流作业系统仿真模型。
通过模型仿真给出了一定条件下岸桥、场桥和集卡之间的关系。
结果表明,该仿真方法可用于集装箱码头物流系统中存在的瓶颈设备进行分析和优化,具有较高的应用价值。
关键词:集装箱码头;物流系统;Flexsim;系统仿真中图分类号:U169.6 文献标识码:AAbstract: In this paper, a simulation model of the logistics system based on Flexsim was built in order to improve the operational efficiency of the logistics system of the container ports, though which we identified the relationship among quay cranes, yard cranes and container trucks. The result shows that this simulation method can be used to identify bottlenecks in the container terminal logistics system. It will be has a higher application value.Key words: container terminal; logistics system; Flexsim; system simulation0 引言集装箱码头作业系统是一个复杂的离散事件系统,因其作业过程中受内外不确定因素的影响,整个物流系统具有一定的随机性和离散性。
面向超大级差船舶的集装箱水转水码头装卸系统的仿真研究
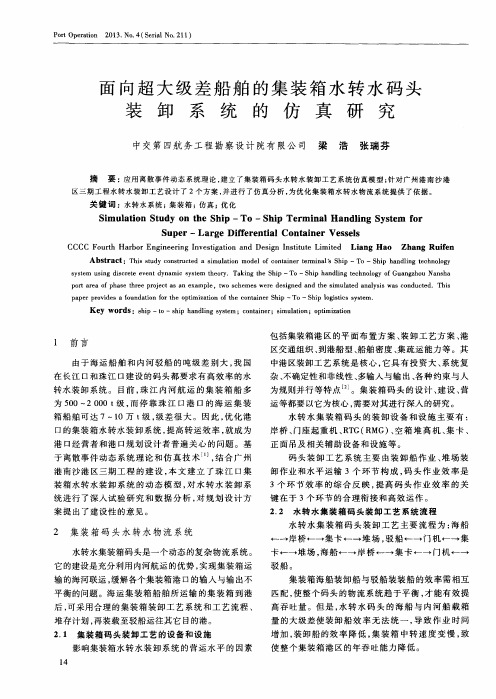
杂、 不确 定性和非线性 、 多输入 与输 出 、 各种 约束 与人 为规则 并行 等特 点 。集 装箱 码 头 的设 计 、 建设 、 营 运等 都要 以它 为核心 , 需要对 其进行深入 的研究 。 水 转 水集 装 箱 码 头 的装 卸 设 备 和设 施 主要 有 : 岸桥、 门座起 重 机 、 R T G( R MG) 、 空箱堆高机、 集卡、 正 面 吊及相 关辅 助设 备 和设施 等 。 码头 装 卸 工艺 系统 主要 由装 卸 船作 业 、 堆 场 装 卸作业 和水 平 运输 3个 环 节 构成 , 码 头作 业 效 率 是 3个 环 节 效 率 的综合 反 映 , 提 高码 头 作 业 效 率 的关
为5 0 0~ 2 0 0 0 t 级, 而停 靠 珠 江 口港 口 的海 运 集装
包括集 装箱港 区的平 面布 置方 案 、 装卸 工 艺 方案 、 港
区交通组 织 、 到港船 型 、 船舶密 度 、 集疏 运能 力等 。其 中港 区装 卸工 艺 系统是 核 心 , 它 具 有投 资 大 、 系统 复
Ke y wo r d s:s h i p—t o—s h i p h a n d l i n g s y s t e m ;c o n t a i n e r ;s i mu l a t i o n ;o p t i mi z a t i o n
港口智能化集装箱管理系统研究

港口智能化集装箱管理系统研究随着世界贸易的快速增长,港口成为国际贸易的重要节点。
为了提高港口的运营效率和安全性,越来越多的港口开始引入智能化集装箱管理系统。
本文将对港口智能化集装箱管理系统的研究进行探讨,并分析其在提升港口效率和安全性方面的优势。
一、港口智能化集装箱管理系统的定义和作用港口智能化集装箱管理系统是利用信息技术和物联网技术,通过对集装箱的追踪、监控和管理,实现对港口集装箱运营全过程的智能化管理。
该系统可以自动识别和追踪集装箱的位置和状态,实现对集装箱的自动化管理和控制。
港口智能化集装箱管理系统具有以下几个作用:1. 提升集装箱的运输效率:传统的人工操作方式存在诸多不足,如低效率、易出错等。
而智能化管理系统可以自动化识别、追踪和管理集装箱,大大提高了港口作业效率,减少了作业时间和成本。
2. 提高港口作业的安全性:智能化管理系统可以实时监控集装箱的运输状态和运行轨迹,及时发现异常情况和安全隐患,并提供预警和处理措施,大大降低了事故发生的概率,保障了港口作业的安全性。
3. 优化港口运输资源配置:通过对集装箱的实时追踪和监控,可以精确掌握港口运输资源的使用情况,优化资源配置,提高资源利用效率,降低物流成本。
二、港口智能化集装箱管理系统的关键技术要实现港口智能化集装箱管理系统,需要借助一系列的关键技术。
以下是几个重要的关键技术:1. RFID技术:即射频识别技术,可以实现对集装箱的无线远程识别和追踪,提高集装箱管理的精确度和效率。
2. 传感器技术:通过在集装箱内安装各种传感器,可以对集装箱的温度、湿度、气体等环境参数进行实时监测,提高港口作业的安全性和可靠性。
3. GPS技术:利用全球卫星定位系统,可以实现对集装箱的实时定位和追踪,帮助港口管理者全面掌握集装箱的位置和状态。
4. 云计算技术:通过将港口数据存储和处理放在云端,可以实现集装箱管理数据的实时共享和分析,提高港口作业的协同性和效率。
三、港口智能化集装箱管理系统的应用案例目前,全球众多港口已经开始推广和应用智能化集装箱管理系统。
基于虚拟仿真的物流系统仿真与优化

基于虚拟仿真的物流系统仿真与优化随着物流业的不断发展,物流系统的建设和优化变得越来越重要。
然而,传统方法在物流系统仿真和优化方面已经无法胜任了。
因此,基于虚拟仿真的物流系统仿真与优化成为研究热点。
本文将从物流系统仿真和优化的意义出发,介绍基于虚拟仿真的物流系统仿真和优化方法及其优势。
一、物流系统仿真和优化的意义物流系统是指在保证产品和服务运输或信息流畅优化的情况下,通过物流信息系统的规划、协调、控制、统计、评价和改进等方面的一系列活动,满足客户需求的物流过程。
其核心是货物流通过程中的信息流、资金流和服务流。
物流系统仿真和优化是指建立一个近似实际的物流系统模型,以分析和评估其运作效率、可靠性、成本和服务质量等方面,并针对不同情况提出优化方案,以达到最佳目标。
物流系统仿真和优化的意义在于:1.提高物流系统效率。
物流系统仿真和优化可以帮助企业优化物流过程,提高效率和质量,缩短运输周期,降低成本。
2.提升企业竞争力。
物流系统仿真和优化可以提供更准确的信息,使企业能够更好地识别市场变化,及时采取措施,增强企业竞争力。
3.降低物流系统的风险。
物流系统仿真和优化可以帮助企业及时了解物流系统中出现的问题,避免系统崩溃和故障对企业造成的影响。
二、基于虚拟仿真的物流系统仿真和优化方法基于虚拟仿真的物流系统仿真和优化是利用计算机技术和数学建模技术将实际物流系统建模为虚拟系统,对其进行仿真和优化的过程。
主要方法包括:1.建立系统模型。
企业可以将实际物流系统建模为虚拟系统,将整个物流系统划分为不同模块和子系统,并确定系统的运作流程和各个环节的关系。
然后,工程师可以使用模型来表达不同情况下物流系统的性能和输出,以及不同情况下物流系统的变化。
2.系统评估和性能优化。
使用虚拟仿真技术,通过更真实的测试和模拟数据,来分析实际物流系统存在的问题。
通过对实际物流系统的评估和性能测试,可以为企业提供更贴近实际的改进方法,以优化物流系统的运作效率、成本、质量和服务等方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0引言集装箱码头物流系统(container terminal logistics systems,CTLS)作为集装箱运输网络中连接不同运输模式的核心枢纽节点,是一个典型的离散事件动态系统,亦是一个标准的并发多环节多维空间作业开放复杂系统。
CTLS的生产作业和控制决策具有明显的多目标性、不确定性和复杂性,其各个局部的控制决策均为典型的NP-Hard问题,而CTLS整体集成生产调度的数学模型及其最优解更是难以获取[1]。
于是近年来国内外众多学者开始利用基于仿真的优化(simulation based opti-mization,SBO)对CTLS进行研究和讨论。
在国际最权威的仿真学术会议——美国冬季仿真会议上,近年来几乎每年都有将SBO应用于CTLS的生产作业的论文。
2008年,Legato等对动态不确定环境下的码头岸桥调度利用SBO进行了探讨,其仿真结果表明,其方法可以很好地提高港口前沿的吞吐量[2];2009年,Xi Guo等利用SBO对港口的场桥调度进行了研究,并建立了实用性很强的场桥管理系统[3]。
世界顶尖的OR Spectrum国际期刊也在2010年刊发了由Pasquale Legato等撰写的《Simulation-based optimization for discharge/loading opera-tions at a maritime container terminal》一文,其利用SBO就码头前沿的岸桥装卸和后方堆场的场桥堆码的联合作业进行了整体研究,通过仿真实验该建模优化方法可以大大提高港口的全局作业效率[4]。
而国内的王红湘[5]、张涛[6]、金淳[7]等分别基于SBO对码头泊位分配、堆场配置和大门作业进行了相关的研究,而李浩渊则利用并行SBO对港口的箱区规划和集卡配置进行了论述[8-9]。
但他们都未从整体的角度对面向CTLS的SBO提出探讨,只是将SBO运用于CTLS的单个或2个作业环节中。
有鉴于此,本文立足整个港口生产全局,系统地提出面向CTLS收稿日期:2011-01-10;修订日期:2011-03-21。
的SBO 的整体体系,从“六域”的角度对其进行了详细地分析和探讨。
随后给出了其具体的参考设计模型,并利用相关的仿真实验验证了其可行性与可信性。
1SBO 与CTLS基于仿真的优化(simulation based optimization ,SBO )的基本思想是用仿真系统来模拟复杂系统的运行,并评估其性能,而用上层的优化器依据仿真结果进行优化。
SBO 是数学规划和智能优化技术的自然延伸,其所主要面向的系统往往具有以下的特点:①人们对系统的特性和内在规则还不完全清楚,缺乏必要的相关知识,只能把系统当作黑箱来处理;②系统中因素多、关联多,很难用数学模型来表述,或者即使表述出来也难以处理;③系统中含有大量的不确定性,只能用仿真加统计的方法才能对系统性能进行评估[10]。
这些特点使得相关的系统很难用基于数学模型的优化方法来求解,同时随着优化问题越来越复杂,对优化对象的评价只能通过仿真获得的统计指标来实现。
但仿真本质上是一种试验方法,通过枚举对备选方案进行逐一验证,搜索目标不明确,无法给出问题最优或近优解,当试验方案较多时,该方法变得极其复杂,甚至无法实现[11]。
于是SBO 就成为解决复杂优化问题的最佳选择,其经修正后的基本实现原理如图1所示。
这里需要着重强调的是在图1中数据库的作用至关重要,它相当于整个系统的“黑板”模块,是SBO 高效运作的中心枢纽。
①现实实践中的目标系统将其运作过程和状态存储到数据库中,从而跟踪和分析系统的运作状况;②将生产任务输入数据库中,驱动仿真模型的运行,并记录其方案执行情况,这样做可以更全面评估优化所给出解的优劣,也可以与实际系统运行的结果相比较,从而进一步验证仿真模型与实际系统之间的合理性。
另一方面,CTLS 的生产调度与管理决策是典型的NP-Hard 问题,其一直是系统工程领域理论研究和实践应用的难点和热点。
于是国内外学者纷纷利用不同的方法和技术,面向港口作业的各个环节以及整体生产,对CTLS 的建模优化进行了研究。
Dirk Steenken 、Stefan Voss 、Robert Stahlbock 、Hans-Otto G ünther 和Kap-Hwan Kim [12-14]对当前集装箱运输的总体发展,自动化、半自动化和机械化集装箱码头的装卸设备,相关港口集装箱物流的各个环节的作业组织和控制,码头运作计划和调度的数学解析法、仿真方法、智能优化方法进行了系统地总体概括、文献回顾和趋势总结,从中我们不难发现当前CTLS 的研究应用中主要存在着以下两点不足和趋势:①当前的研究对象主要是CTLS 中的局部生产环节,但正在向港口的整体综合集成调度延伸;②目前研究问题基本上是针对港口作业的单目标优化问题,但随着港口发展的需要,日后以后必定向多目标优化问题扩展。
上述CTLS 的研究发展趋势也使得再使用以往单纯的数学解析、建模仿真和智能优化方法很难满足当前理论研究和实践应用的需要,那么必然会向它们的融合——基于仿真的优化方向发展,而CTLS 当前面临的研究对象和讨论问题正是SBO 所擅长的领域。
同时以往CTLS 研究目的主要是进行运筹学理论应用和系统工程方法研究,但以后更多向为港口提供高效智能的决策支持系统软件平台方向努力,而面向CTLS 的SBO 可作为集装箱码头智能决策支持系统平台的关键组成部分,从而可增强港口的核心竞争力,提高其物流系统发展的软环境。
2面向CTLS 的SBO 整体体系1998年,美国密西西比州立大学的Hall 和Bowden 首次指出,仿真优化研究人员缺乏从系统的角度对仿真优化进行研究,有必要将仿真优化的各种单点技术集成到一个统一的技术框架下,为此,他们提出了“六域”的集成仿真优化框架,即问题域、算法域、分类域、策略域、智能域和界面域[15]。
上述六域构成了一个完整而有联系的理论框架,为仿真优化的集成问题指明了方向。
具体到CTLS 这个复杂系统,我们通过对国内外相关研究的总结和概括,可以提出如图2所示的面向CTLS 的SBO 整体框架体系。
在如图2所示的面向CTLS 的SBO 的整体框架体系中,我们从上述的六域对其进行展开。
(1)在问题域中,由于当前仅仅使用形式化或非形式建模技术对CTLS 进行描述,都有着不可克服的缺点,于是将两者结合对CTLS 进行复合建模是一个最佳选择,并根据相应的复合模型依照不同的港口平面布局、生产工艺、集疏运体系和运营策略来提出CTLS 的目标函数、约束条件和协作机制;(2)在分类域中,有3个很重要的研究和应用趋势,第一,从以往单资源的生产计划向多资源的联合协同调度决策发展;第二,不管是单个环节的作业组织还是整体的集成调度,往往要求管理人员从整体进行考虑,于是其正从单目标优化问题向多目标优化问题转化,求解更加复杂;第三,由于CTLS 内部运作时具有不同的调度层次和粒度,而CTLS 自身也要求各子系统间的高协调性,因此往往现在CTLS 中采用多阶段或多层次优化方法来取代传统的单阶段优化方法;这3个趋势使得SBO 在CTLS 中将更有用武之地;(3)由于SBO 是将现实世界的运作通过仿真映射到信息世界中,而优化引擎自身也需要占用大量的计算资源,因此面向CTLS 的SBO 的实现和应用需要采用高效鲁棒的后台计算策略支撑。
而这从本质上既是SBO 通过构建在硅片中的世界来影响物理世界的需要,也是回归计算机最根本应用——科学计算的综合体现。
具体在策略域中,一脉相承的并行计算、分布式计算、网格计算和云计算将为SBO 在CTLS 中的实践应用提供丰富的计算资源,从而帮助其在允许的时间范围内给出高效可行的计划调度较优可行解;图1经改进后的SBO 原理目标系统仿真模型模型验证驱动交互目标函数值寻优的解仿真平台仿真评估存储校核数据库(4)CTLS 中的控制和调度的算法主要源于运筹学、统计学和启发式算法,而其中的启发式算法则多为计算智能算法,它们共同构成了上述体系中的算法域和智能域。
它们依据CTLS 应用的场景和时限的不同,而选用不同的方法,从而在集装箱码头的生产调度和决策支持中注入智能;(5)对于界面域,SBO 作为一个帮助CTLS 寻求资源配置最佳和生产调度优化的决策支持工具,其应该与用户、信息系统、信息基础设施和后台数据库层都有着良好的交互作用,甚至能够提供沉浸式的虚拟现实服务,并且应依据需要,提供不同层次的接口和服务,就像计算机操作系统会提供用户图形接口和底层的API 接口一样。
3面向CTLS 的SBO 的参考模型针对上述的面向CTLS 的SBO 体系,我们制定相应的建模方法、优化算法和软件体系结构就能具体确定一个的针对CTLS 的SBO 的解决方案。
CTLS 是一个高度复杂的开放分布式控制系统,我们就利用分布式人工智能的典型方法——多Agent 技术对其进行建模。
基于Agent 的建模与仿真(agent based modeling and simulation ,ABMS )特别适用于具有如下特点的领域:①系统所处的环境具有高度的动态性、不确定性、复杂性和开放性;②在建模过程中,系统中各个相关的软硬件实体能够根据实际运作状况,很好地被隐喻和映射为各个Agent ;③系统中的数据、控制和知识具有典型的分布式特征;④系统的软硬件中有相当部分为遗留系统[16]。
CTLS 显然具有上述的4个特点。
(1)集装箱码头作为国际物流体系的核心节点,需要和船代、货代等进行集装箱和信息的交换,那么CTLS 的运作显然具有很强的动态性和开放性,而由于集装箱船舶和外集卡到港具有一定的集疏运的随意性、码头自身装卸工艺飞速发展和自然环境的突变等原因,使得CTLS 又具有高度的不确定性和复杂性;(2)CTLS 是由集装箱、集装箱船、泊位、堆场、港口装卸搬运设备、通信设施以及人员等若干相互制约的动态要素构成的复杂系统。
其装卸生产过程可以看作是一个典型的柔性制造系统的作业流程,是一个多环节的分布式控制过程,而这种内在的特点使得它拥有上述的②和③特点;(3)集装箱船舶的大型化、快速化以及日益激烈的港口之间的竞争,使得港口在自身建设中投入大量的财力和人力,但是前期投入的设备和软件系统并不会随着新的软硬件的投入使用而被淘汰,它们仍然会在港口中运行,即CTLS 的软硬件是一个渐进的演化过程,而不是剧变式的,因此,其中必然存在大量的遗留系统,而这些遗留系统它们也需要和新投入使用的子系统间进行交互和协作。
ABMS 对于CTLS 的生产调度和控制决策来说是一个可行敏捷和高效鲁棒的解决方案。