2007年重庆大学机械原理考研试卷
重庆大学2012-2013(1)机械原理试题A卷
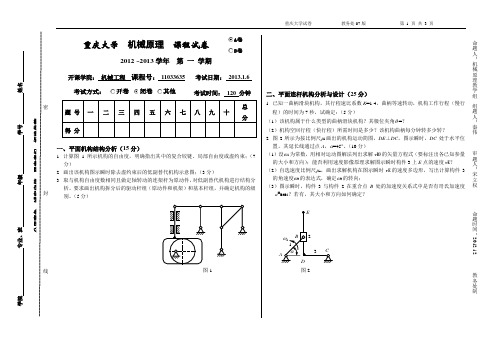
重庆大学 机械原理 课程试卷2012 ~2013学年 第 一 学期开课学院: 机械工程 课程号: 11033635考试日期: 2013.1.6考试方式:考试时间: 120 分钟一、平面机构结构分析(15分)1. 计算图1所示机构的自由度,明确指出其中的复合铰链、局部自由度或虚约束;(7分)2. 画出该机构图示瞬时除去虚约束后的低副替代机构示意图;(3分)3. 取与机构自由度数相同且做定轴转动的连架杆为原动件,对低副替代机构进行结构分析。
要求画出机构拆分后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(5分)二、平面连杆机构分析与设计(25分)1. 已知一曲柄滑块机构,其行程速比系数K =1.4,曲柄等速转动,机构工作行程(慢行程)的时间为7秒,试确定:(5分)(1)该机构属于什么类型的曲柄滑块机构?其极位夹角θ =?(2)机构空回行程(快行程)所需时间是多少?该机构曲柄每分钟转多少转? 2. 图2所示为按比例尺μl 画出的机构运动简图,DE ⊥DC ,图示瞬时,DC 处于水平位置,其延长线通过点A ,α=45︒。
(10分)(1)设ω1为常数,用相对运动图解法列出求解v B3的矢量方程式(要标注出各已知参量的大小和方向);能否利用速度影像原理求解图示瞬时构件3上E 点的速度v E ? (2)自选速度比例尺μv ,画出求解机构在图示瞬时v E 的速度多边形,写出计算构件3的角速度ω3的表达式,确定ω3的转向;(3)图示瞬时,构件3与构件2在重合点B 处的加速度关系式中是否有哥氏加速度a K B3B2?若有,其大小和方向如何确定?命题人:机械原理教学组组题人:秦伟审题人:宋立权命题时间:2012.12教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密图1图23. 试设计一曲柄摇杆机构,已知行程速比系数K=1.5,机架长度l AD=100mm,曲柄为主动件。
当摇杆在右极限位置时,曲柄AB2与机架夹角为30︒,如图3所示(图中μl=0.002m/mm),当摇杆在左极限位置时,机构压力角α=30︒。
【重庆大学825机械原理】核心考点及真题精讲课程—讲义
第二部分真题回顾及其解析通过真题的学习和掌握,可以帮助学生把握考试重点。
每年的考点在历年试题中几乎都有重复率,因此,通过对历年真题的把握,可以掌握今年考试的重点。
另外,可以通过对历年真题的学习,把握出题者的思路及方法。
每种考试都有自己的一种固定的模式和结构,而这种模式和结构很难用语言来表述。
而通过认真揣摩历年真题,可以找到这种感觉。
因此,第四部分就真题进行详细的剖析,以便考生掌握命题规律、知悉命题的重点、难点、高频考点,帮助考生迅速搭建该学科考试的侧重点和命题规则。
2.1真题分析年份题型分值考察范围考察难度(了解、理解、掌握、应用)2010计算绘图143825机械原理掌握论述7825机械原理掌握2009计算绘图150825机械原理掌握2008计算绘图150825机械原理掌握2007计算绘图150825机械原理掌握综合来说,825机械原理专业课这几年的题型变化不大,主要有计算绘图题型,难度不变,侧重于对基础知识点的掌握。
在复习时,对于了解的知识点,复习的时候,多花时间加以深入理解和掌握;对于熟悉的知识点,复习的时候,可以花相应的时间复习强化;对于掌握的知识点,复习的时候,多做练习,达到熟练掌握和理解。
2.2真题剖析2002年真题【点评】本年份考试科目为机械设计,包含有机械原理,在本部分真题解析只对其中机械原理真题进行解析。
本年份真题包括以下1种题型:3道计算作图题,总计50分。
【题目】一1.计算图一所示发动机配气机构的自由度,若有复合铰链,局部自由度,虚约束,应明确指出。
(5分)图一【解题】F=3n-(2P L+P H)-F’=3×7-(2×9+1)-1=1A处滚子带入局部自由度,H(G)处与G(H)处的移动副起重复约束作用,故H(G)处移动副带入虚约束。
【分析】该题包括机构自由度的计算,虚约束,局部自由度以及复合铰链4个知识点。
机构自由度的计算,是每年必考的的知识点之一。
命题者主要想考察同学在进行机构自由度计算时,对虚约束,局部自由度和复合铰链这三个知识点的把握程度。
重庆大学机械原理章节习题库 第一章思考题及复习题(含答案)

第一章平面机构的结构分析基本概念题与答案1.什么是平面机构?答:组成机构的所有构件都在同一平面或相互平行的平面上运动。
2.什么是运动副?平面运动副分几类,各类都有哪些运动副?其约束等于几个?答:运动副:两个构件直接接触而又能产生一定相对运动的联接叫运动副。
平面运动副分两类:(1)平面低副(面接触)包括:转动副、移动副,其约束为 2。
(2)平面高副(点、线接触)包括:滚子、凸轮、齿轮副等,约束为 1。
3.什么是运动链,分几种?答:若干个构件用运动副联接组成的系统。
分开式链和闭式链。
4.什么是机架、原动件和从动件?答:机架:支承活动构件运动的固定构件。
原动件:运动规律给定的构件。
从动件:随原动件运动,并且具有确定运动的构件。
5.机构确定运动的条件是什么?什么是机构自由度?答:条件:原动件的数目等于机构的自由度数。
机构自由度:机构具有确定运动所需要的独立运动参数。
6 .平面机构自由度的计算式是怎样表达的?其中符号代表什么?答:F =3n- 2P L-P H其中:n----活动构件的数目,P L----低副的数目,p H----高副的数目。
7.在应用平面机构自由度计算公式时应注意些什么?答:应注意复合铰链、局部自由度、虚约束。
8.什么是复合铰链、局部自由度和虚约束,在计算机构自由度时应如何处理?答:复合铰链:多个构件在同一轴线上组成转动副,计算时,转动副数目为m-1个局部自由度:与整个机构运动无关的自由度,计算时将滚子与其组成转动副的构件假想的焊在一起,预先排除局都自由度。
虚约束:不起独立限制作用的约束,计算时除去不计。
9.什么是机构运动简图,有什么用途?答:抛开构件的几何形状,用简单的线条和运动副的符号,按比例尺画出构件的运动学尺寸,用来表达机构运动情况的图形。
用途:对机构进行结构分析、运动分析和力分析。
典型例题例2-1 试计算图示各运动链的自由度数,并判定他们能否成为机构(标有箭头的构件为原动件)。
重庆大学机械设计往年考试卷

2、如果螺栓的强度级别为 4.6,则螺栓材料的屈服极限σs 为 240 Mpa; 而螺母的强度 级别 为 8 ,则表示螺母 材料 的 抗 拉强度 σ b 等 于 800 Mpa。 3、普通平键的截面尺寸(键宽 b 和键高 h)按 轴的直径 在标准中选 定;键的长度 L 可根据 轮毂 长度确定,并且还应附合标准 规定的 长度系列 。 4、在带传动中,紧边拉力 F1 和松边拉力 F2 的比值(即 F1/F2)当空载时约为 1 ;当正常工作时为 1~efα ;当载荷使带传动要打滑但还没有打 滑时为
三、 简答题( 简答题(6 分/1~3 题每题, 题每题,4 题 7 分,共 25 分)
1、为什么皮带传动通常用在高速级,但在设计时又要对它的线速度加以限 制? 答:由公式 P=FV 知,增加带速 V,在圆周力 F 不变的情况下,可提高带传 动传递的功率 P,即有利于提高带传动的承载能力;在 P 不变的情况下,可 减小圆周力 F, 有利于减少 V 带的根数或采用较小型号的 V 带, 进而减小带 传动的结构尺寸。因此带通常用在高速级。但过高的带速,带的离心力将显 著增大,一方面减小了带与带轮间接触压力,从而降低了传动的工作能力; 另一方面,这将使带的离心应力过大,从而降低带的疲劳寿命。因此在设计 时又要对它的线速度加以限制。带速一般在 5~25m/s 为宜,在 20~25m/s 范围最有利。
(2)在题图(A)中,在安装完毕并已承受工作载荷 F∑之后,为了检 查螺栓预紧力是否达标,可用力矩扳手试扳螺母。当螺母刚刚被扭动时,若 力矩扳手的读数为 12000N-mm, 假定拧紧力矩 T 和螺栓拉力 F’的关系式为: T=2.4F’,支座底板结合面间的摩擦因数 fs=0.4,试求: ① 螺栓的总拉力 F0 和预紧力 F’; ② 支座底板结合面间能产生的最大摩擦力 Ffmax 。 解: (1)这两个设计方案,图(A)更合理。将两图中的外载荷 F∑向螺栓联 接结合面形心简化后可知,图(A)螺栓组只受轴向拉力和横向剪力,每棵
重庆大学机械原理期末试卷

提示: Lh
=
16670 ⎜⎛ C ⎟⎞ε n ⎝P⎠
2. 在图示轮系中,已知各齿轮齿数(括号内为齿数),1 为单头左旋蜗杆, 试判定该轮系是什么轮系,计算传动比 i16,并用箭头表示各轮的转向。
得分
16. 平键联接的工作面是平键的上、下表面。
()
审 题
人
()
:
一、 判断题(1 分/每小题,共 16 分,对打“√”,错打“×”) 二、 单项选择题(2 分/每小题,共 30 分)
1. 设计软齿面闭式齿轮传动时,小齿轮齿面硬度应小于大齿轮齿面硬度。 ()
1. 齿轮齿根弯曲强度计算中的齿形系数 YFa 与____________无关。
D、保证链条与轮齿间的良好啮合
11. 采用螺纹联接时,若被联接件之一厚度较大且材料较软,强度较低,需
要经常装拆,则一般宜采用____________。
A、螺栓联接
B、双头螺柱联接
C、螺钉联接
D、紧定螺钉联接
12. 凸 轮 机 构 中 当 从 动 件 位 移 规 律 为 等 加 速 等 减 速 运 动 规 律 时 ,
____________。
A、不存在冲击
B、存在刚冲击
C、存在柔性冲击
D、同时存在刚性和柔性冲击
13. 限制蜗杆分度圆直径的目的是____________。
A、保证蜗杆有足够的刚度
B、提高蜗杆的传动效率
C、减少蜗轮滚刀的数目,并便于刀具的标准化
D、保证蜗杆有足够的弯曲强度
14. 在轴的初步计算中,轴的直径是按____________进行初步确定的。
重庆大学2010-2011(2)机械原理试题A

重庆大学 机械原理 课程试卷2010 ~2011学年 第 二 学期开课学院: 机械工程 课程号: 11033635 考试日期: 2011.6.25考试方式: 考试时间: 120 分钟一、平面机构结构分析(15分)1. 试用图1-1所示II 级基本杆组搭接一个自由度为1,且输入运动为单向连续转动,输出运动为往复直线移动的平面六杆机构,画出机构结构示意图,标出原动件;(4分)2. 图1-2所示机构中,凸轮为一偏心圆,圆心在O 点。
(1)计算该机构的自由度,明确指出机构中的复合铰链、局部自由度或虚约束;(5分) (2)画出该机构在图示瞬时的低副替代机构示意图,取凸轮为原动件,对机构进行结构分析。
要求画出拆分机构后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(6分)二、平面连杆机构分析与设计(25分)1. 图2-1为一平行四边形机构的机构运动简图。
曲柄1的角速度为ω1,角加速度为α1,方向如图所示。
(1)标出该机构在图示位置的压力角α;(2分)(2)用相对运动图解法求点C 的速度v C ,构件2、3的角速度ω2、ω3(要求列出速度向量方程,作出速度多边形,建议以pb =30mm 表示v B ,所有作图线要清晰);(6分)(3)用相对运动图解法求点C 的加速度a C ,构件2、3的角加速度α2、α3(要求列出加速度向量方程,作出加速度多边形,建议以p 'n 'B =30mm 表示nB a , n 'B b '=30mm 表示tB a ,所有作图线要清晰)。
(6分)命题人:机械原理教学组组题人:秦伟审题人:宋立权命题时间:2011.06教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密图1-1图2-1G图1-22. 设计一个全铰链六杆机构,其结构为前置曲柄摇杆机构后接一个RRR 型II 级组。
曲柄摇杆机构行程速比系数K =1.4,摇杆CD 的两极限位置分别为C 1D 及C 2D ,摆角ϕ=60︒,其对应输出构件EF 的两条标线位置分别为FG 1和FG 2,摆角ψ=30︒。
机械原理试题A卷
重庆大学 机械原理 课程试卷A卷B卷2010 ~2011学年 第 一 学期开课学院: 机械工程 课程号: 11026135 11033635考试日期: 2010.12.30考试方式:开卷闭卷 其他 考试时间: 120 分钟一、平面机构结构分析(15分)1. 计算图1-1所示机构的自由度,请明确指出机构中的复合铰链、局部自由度或虚约束;(6分)2. 说明该机构采用局部自由度和虚约束结构的目的;(3分)3. 画出图1-2所示机构在图示瞬时的低副替代机构运动简图,并对机构进行结构分析,要求画出拆分机构后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(6分)二、平面连杆机构分析与设计(30分)1. 图2-1所示六杆机构可以视为由曲柄摇杆机构和摇杆滑块机构串联而成。
(1)标出该六杆机构在图示位置的压力角α 与传动角γ;(6分)(2)用相对运动图解法求滑块5的速度v E ,列出速度向量方程,作出求解v E 的速度多边形(图2-2中的pb 表示v B ,直接在图2-2作图);(10分) (3)写出求解加速度a E 的向量方程式。
(4分)命题人:机械原理教学组组题人:秦伟审题人:宋立权命题时间:2010.12教务处制学院专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密E图2-1 p b图2-2图1-2图1-12. 设计一个六杆机构,其结构如图2-1所示,前置曲柄摇杆机构行程速比系数K=1.4,摇杆CD的两极限位置分别为C1D及C2D,摆角ϕ=60︒,其对应滑块的两位置分别为E1及E2,机架水平布置,C1D与机架垂直,回转副F的中心在CD连线上。
设图2-3已按比例绘制出C1D、C2D以及E1、E2,用图解法在图2-3上设计,求出曲柄长度l AB、机架长度l AD、连杆长度l BC、l FE以及DF长度L DF(保留作图线)。
(10分)三、凸轮机构分析(10分)图3-1所示滚子摆动从动件盘形凸轮机构中,凸轮为一偏心圆,顺时针转向,已知参数:R=20 mm,l OA=10 mm,l OB=40 mm,l BC=33 mm,r r=5 mm。
重庆大学机械原理模拟试题
更多资料请访问.(.....)模拟题一一.计算图示机构自由度,指明复合铰链,局部自由度,和虚约束所在;进行高副低代,然后拆分杆组,判断机构的级别。
(20分)二.在图示的机构中,已知各构件长度,原动件以等角速度w1=10 rad/s 逆时针转动,试用图解法求点D的速度。
(20分)三. 1.图示铰链四杆机构中,已知各构件的长度l AB=25mm,l BC=55mm,l CD=40mm,l AD=50mm,试问:(15分)(1)该机构是否有曲柄,如有,请指出是哪个构件;(2)该机构是否有摇杆,如有,请指出是哪个构件;(3)该机构是否有整转副,如有,请指出是哪个转动副;2.设计一铰链四杆机构,如图所示,已知行程速比系数K=1,机架长L AD=100mm,曲柄长L AB=20mm,当曲柄与连杆共线,摇杆处于最远的极限位置时,曲柄与机架的夹角为30°,确定摇杆及连杆的长度。
(20分)四.图示机构的凸轮轮廓线由两段直线和两段圆弧组成。
(1)画出偏距圆;(2)画出理论廓线;(3)画出基圆;(4)画出当前位置的从动件位移s ;(5)画出当前位置的凸轮机构压力角;(6)画出从动件升程h 。
(7)凸轮的推程角φ,近休止角φs ’,回程角φ’(20分)五.一对正常齿制规范安装的外啮合规范直齿圆柱齿轮传动,已知传动比i=2.5,中心距a=175mm ,小齿轮齿数z1=20,压力角α=20°。
试计算模数m 、大齿轮的几何尺寸基圆直径,齿顶圆直径和齿根圆直径。
(20分)六.图示轮系各轮的齿数已在括号中标注,已知主动轮1的转速为每分钟1转、主动轮4的转速为每分钟2转,转向如图所示。
试求输出构件H 的转速和转向。
(20分)(25) 3(30)2'4 (90)1(25)2 (30)3'(20)n 1 n 4H七.图示减速器,已知传动比i=z2/z1=3,作用在大齿轮上的阻力矩随大齿轮的转角φ2变化,其变化规律为:当0<=φ2<=120°时,阻力矩为M2=300N•m;当120°<=φ2<=360°时,阻力矩为M2=0,又已知小齿轮的转动惯量为J1,大齿轮的转动惯量为J2。
重庆大学2017-2018学年《机械原理》课程试卷
重庆大学 《机械原理》 课程试卷juanA卷B卷2017 ~2018学年 第1学期 开课学院:机械工程 课程号:11023730 考试日期:考试方式:开卷闭卷 其他 考试时间:120分钟一、 结构设计题(共20分)⒈计算图示系统自由度,并在图中标明虚约束、复合铰链、局部自由度。
(8分)题一 1 图 题一 2 图2.分别以AB 、DE 为原动件对图示机构进行结构分析,要求画出原动件、基本组,并指出机构的级别。
(8分)3.试对图示机构进行高副低代,要求画出替代机构。
(4分)题一 3 图二、 连杆机构设计题(共30分)1.标出图示机构的所有瞬心。
(6分)2.试画出图示机构的最小传动角 min 。
(4分)命题人:宁先雄 组题人:宁先雄审题人:命题时间:2007-12-6教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密题二 1 图题二 2 图3.试画出3种从动件具有急回运动特性的平面四杆机构的示意图,并写出机构名称及各构件尺寸应满足的条件。
(8分)4.图示平底摆动从动件盘状凸轮机构的凸轮为圆盘,摩擦圆、摩擦角、驱动力矩Md 、阻力FR如图所示。
试画出图示机构的静力分析图。
(6分)题二 4 图5.已知曲柄滑块机构的行程速比系数K=1.25、滑块行程H=250mm、偏距e=50mm。
试用图解法设计该机构。
要求画出设计图(不写作图过程)、写出极位夹角θ、曲柄长度a和连杆长度b的计算式和计算结果。
建议作图比例尺为μL=0.01m/mm。
(6分)三、齿轮机构题(10分)一对正常齿制标准安装的外啮合直齿圆柱齿轮传动,已知传动比 i=2.5,中心距a=175mm,小齿轮齿数z1=20,压力角α=20°。
试计算模数m、大齿轮的几何尺寸r2、rb2、 ra2和rf2。
四、凸轮机构题(10分)图示机构的凸轮轮廓线由两段直线和两段圆弧组成。
(1)画出偏距园;(2)画出理论廓线;(3)画出基园;(4)画出当前位置的从动件位移s;(5)画出当前位置的凸轮机构压力角α;(6)画出从动件升程h;(7)标注凸轮转向并说明原因。
(NEW)重庆大学《825机械设计基础》历年考研真题汇编
2015年重庆大学825机械设计基础考研真题 2014年重庆大学825机械设计基础考研真题 2013年重庆大学825机械设计基础一考研真题 2012年重庆大学825机械原理一考研真题 2011年重庆大学825机械原理一考研真题 2010年重庆大学825机械原理一考研真题 2009年重庆大学825机械原理考研真题 2008年重庆大学825机械原理考研真题 2007年重庆大学4 2005年重庆大学437机械设计(含机械原理)考研真题 2004年重庆大学437机械设计(含机械原理)考研真题 2003年重庆大学437机械设计(含机械原理)考研真题 2002年重庆大学572机械设计(含机械原理)考研真题
2003年重庆大学437机械设计(含 机械原理)考研真题
2002年重庆大学572机械设计(含 机械原理)考研真题
2009年重庆大学825机械原理考研 真题
2008年重庆大学825机械原理考研 真题
2007年重庆大学426机械原理考研 真题
2006年重庆大学机械原理考研真 题
2005年重庆大学437机械设计(含 机械原理)考研真题
2004年重庆大学437机械设计(含 机械原理)考研真题
2015年重庆大学825机械设计基础 考研真题
2014年重庆大学825机械设计基础 考研真题
2013年重庆大学825机械设计基础 一考研真题
2012年重庆大学825机械原理一考 研真题
2011年重庆大学825机械原理一考 研真题
2010年重庆大学825机械原理一考 研真题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D)不 能降芷姆中的摩擦力矩 B . 加注润滑油:
c.略为增大轴承与轴颈的问隙:
O. 增加轴承的长度。
(4) 幽柄为原动件的偏置曲柄滑块机构,当机构的传动角越小时,则(
A. 由柄 与导路平行; B . 曲柄与导路垂直: C.曲柄与 连杆共线:
B).
O. 曲柄与连杆垂直,
(5) 自l 柄为原动件的曲柄掘杆机构,其行程速比系数 K= l. S , 那么极位夹角 θ 等于〈乙) .
(3) 计算 i n严?井指出系杆 ~ H 和主动齿轮 l 转向的异同; (1 ) 列~出轮系的 三 个功能.
七、四 5 所示起重机机构示意图,作用于构件 I 上的驱动力矩 Md =60N . m ; 重力Q=9 80N; 卷筒半
径 R=O.lm ; 各轮齿数: zl=20 , Zz=40 ,转动惯量分别为 J1 = l kgm Z , Jz=4kgm 2 • 若取构件 1 为等效构件,
A. 定轴轮系:
~ ).
C. 17 1. 27 ;
C.周 转轮系:
B. 170.27;
B. 行星轮系:
0. 172.27.
D. 差动轮系 -
仰混合轮系中 一定含有一个 ( 乙 ).
00 在间 歇运动机构中, ( 认 〉既可以」盟主建好,又可以边兔刚性冲击". .
A. 不完全齿轮机构;
的条件进行计算。 A . 动能:
(2) 将该机构中的高副化为低 富1) ,井 画出相应的机构运动简图:
~I~ J
)6(/
P'7?I
(3) 取 与机构自由度数相同数目的连架杆为原动件,画出该机构 所含各杆组,并确定杆组的级别和机构的级别.
-飞卢一-飞.../"
图 2
第 2 页共 3 页
飞中
与
四、图 3 所示机构中,己知价=4 5 0 , 向 =lO ra d/s ,逆时针 方向 , '~8=0.4 m , r =60 0 • 试用相对运动图解法求构件 3 的速度 ν』和加速度的 o (2 0 分〉
目 。为机架矿南 1帆雄主李
; - vι 吧鸣叫/ m 阁 J [if示锁链四杆机构,叫 OmmJ=150 rn; 叫20mm . 时Omm , C iy
机构:以 b 为机架伊 极低 付 机构:以
8
()'电
ω 从效率的观点来看,机械的自锁条件是 M
主地 币 2 理
'
的一对斜齿圆柱齿轮传动的重合度由 i梯队九
、 饲 向价且
两部分组成 ·
(10)作转子静平衡时,至少~
01) 用飞轮进行调速时,若其它条件不变,则要求的速度不均匀系数越小 , 飞轮转动惯量将越二在一;
在满足同样的速度不均匀系数的条件下,为了减小飞轮的转动惯量,应将飞轮安装在 南 轴上.
工 、单项选挥题(在每小题的备选答案中选出 一个正确答案,并将代表正确答案的字母填在括号内(30 分 〉
(1)用一个平面低副联接两个做平面运动的构件所形成的运动链具有( è> )自由度。
A. 3;
A. 至少应有 2 个;
B. 4;
B. 最多 有 2 个:
C. 5 ;
c. 只有 2 个:
D. 6.
(2) 具有确定运动的差动轮系中,其原动件的数目 〈 乙 ). 。.不受限制.
第 1 页共 3 页
、-…-
ω 下述四种措施中 , (
r为机架得 a~1唬份!机构;以 d 为机架得 障私咙捋 机构. (6) 在凸轮机构的i种常用运动规律中, 练基 运可;规律将使凸轮 蛐产生削性冲击, 冬协 ?企仇 h¥总啤"亏刊 t战 M 戏也 毯也 、 灿 A 览 1 川恼fJu1Î虱跳豆她丸 i 灿 运刨动规脚律
(8) 惰轮对从动轮的 #让台比
求等效转动惯量 Jt 和等效力矩 M,. ( 1 5 分)
Md
I
/
'"
-T 飞、
」f f工 lω「i, -
/
飞、茶 iL\ 丁γL/
L主j
3
图 4
5
Q
图 5
第 3 页
3号 3 页
---一一~--_,
ω 渐开线上某点的压力角是指该点所受正压力的方向与读点<
A. 绝对速度; B. 相对速度; c.滑动速度:
D)方向 线之间的央角 D. 牵连速度.
(9) 己知一渐开线标准斜齿圆柱齿轮的法面模数 mn=8m m , 分度圈上的螺旋角β =20 0 ,齿数 z=20 ,
则该斜齿轮的分度圆直径为<
A. 169.27;
B. '1Mf柱凸轮间 歇运动机构;
C. 棘机构:
O. 槽轮机构.
) 相等
ω 对于单自由度的机构系统,假想用 一个移动构件等效时,其等效质量按等数前后 A
B. 瞬时功率 : C. 转动惯量 。
俯在机器稳定运转的一个运动循环中 , 应有 < )0
A. 惯性力和重力所作之功均为零; C. 惯性力和重力所作之功不为军:
生机 二阶ÞI 除民如h
于τ ),À - L平~1 )矿
确定
7
11
1l
(2) 做平面运动的构件自由度为_Jz_一 ' 平面机构的自由度九
(1)在平面机构中若引入 一个高副得带入一一」一个约束,而引入 一个低副将带入一乌L一 个约束。
3) ~I!I 两构件不直接组成运动副时,其瞬心位置用
将使凸轮机构产生柔性冲击.
:11 泣 汕+伽)) { i 哇盈k
运动规律贝则 u 设有冲击 o
图叫
'
剧& 8~~(~ 撤销构 .
面( .>.jl衡.>Ji.由i) .
(9) 欲将古丁的匀速转与转换成从动件的单向间歇转动,可以来·点 精制饰 、 71阶 树闹
I 个校时面( 平衡刊j); 而动平衡时 1 3i&~_呈一个校正平
没有影哨,但却能改变从动轮的{圳大向
A.18 0 ;
将(
B. 24 0 ;
C. 360 :
D. 72 0 •
ω 3li增大凸轮机构推程压力 角 α,则该机构的凸轮基圆 半径将( f) ),从动件上所受的有害分力
ì':A ).
A. 增大 :
B. 减小:
已不变。
@对心尖顶移动从动件盘形凸轮机构的哩Æ.}抽挺应用值肘,可采用( 彭 〉措施来解决A. 改用滚子从动件: C. 改变凸轮转向: B.增大基因半径: D. 改为偏置尖顶移动从动件.
., l .
@
重庆大学2007年硕士研究生入学考试试卷
科目代码:
8 、f
426
科目名称:机械原理
精 ~1 提醒考生:
革题一律做在答题低..l (包括填会 a豆 、 选择趣、政错~手) ,直接做在战卷土.接本
州。 ~.t \11:除~j 和朵 、
一 、填空题 ( 25 衍
h ~ l?t tÛl ctrt -i ')+z'L饥(如rγ) j I认
).
I
B. 惯性力所作之功为零 , 重力所作之功不为军: D. 惯性力所作之功不为零,重力所作之功为零 .
ω 对 F宽径比 bld>ω 的不平衡阳性转子,需要进行(
A 静平衡; B 动平衡;
p; ).
ì _呻々 叫
句Hale Waihona Puke C 不用平衡 ·' re))
b 三、对图 2 所示机构,要求; (20 分)
(1)计算该机构的自由度,如有复合锁链、虚约束、局部自由度, 应明 确指 出:
、-、-
一 网 cω
--、
五、 -对渐开线坐坐全正常齿标准直齿圆柱齿轮传动,己
一-../ -飞.--一一~
知模敖 m=5 mm . 压力角 α= 20 0 ,齿数 zl=20 .
分〉
Z2=~ O , 试求 : ( 20
图 3
( 1) 两齿轮分度困直役的、的和齿顶圆桌轮 dul 、 d1J 2 :
(2) 孙准中心距的
(3) 齿轮的基圆齿距 p,,:
ω) 若实际暗含线长度为瓦瓦= 18. 00mm 时,重合度 &a为多少? ;
(5) 当实际中心距 σJ=lS3 mm 时的咱合角 d.
六、图 4 所示轮系,已知 ZI =ZI ,=40 , Z3=Zs=100. Z2=句,各轮均为模数和压力角相同的标准齿轮,试
确定: (20 分〉 (1)该轮系类型及其组成方式: (2) 确定 Z2=?