自适应中值滤波
基于斜率的自适应中值滤波算法

C ODE J / w w jc. n p
di1 .74 S ..0 7 2 1 .0 3 o:0 3 2 / P J1 8 .0 2 O 7 6
基 于 斜 率 的 自适 应 中值 滤 波 算 法
刘淑娟 , 赵 晔 董 , 蕊。王 志巍 杨 芳芳 , ,
波方 法相 比 , 方法加 强 了噪声检测 的条件 。实验 结果表 明, 该 该算法具有较好地 去除椒盐噪 声和保 留细节的效果 。
关键 词 : 声检 测 ; 噪 椒盐噪 声 ; 斜率差值 ;中值滤 波; 图像去噪
中 图 分 类 号 : P 9 . 1T 3 1 6 T 3 14 ;P 0 . 文献标志码 : A
Ada i e m e i n le i g a g r t s d o l pe ptv d a f t r n l o ihm ba e n so i
L U S uj a Z I h -u n 。 HAO DO Ye NG u R i。WANG Z iw i。 h— e YANG F n . n a gf g a
wa h xr me v le o l t ep x l i h i d w,i wa u p s d t ep o a l os o n .T e p x l r yv l e i h stee t e au f l h ie s n t e w n o a t ss p o e ob r b b y an i p it h ie a a u t e e g n
s u nc ifr nc t e het ci t n e eq e e dfe e ebewe n t wo s rp sa d a tmplt e ue c ft lpe o i e r y v l e wihi her g o r ae s q n e o he so ft p x lg a a u t n t e i n we e he
自适应中值滤波器
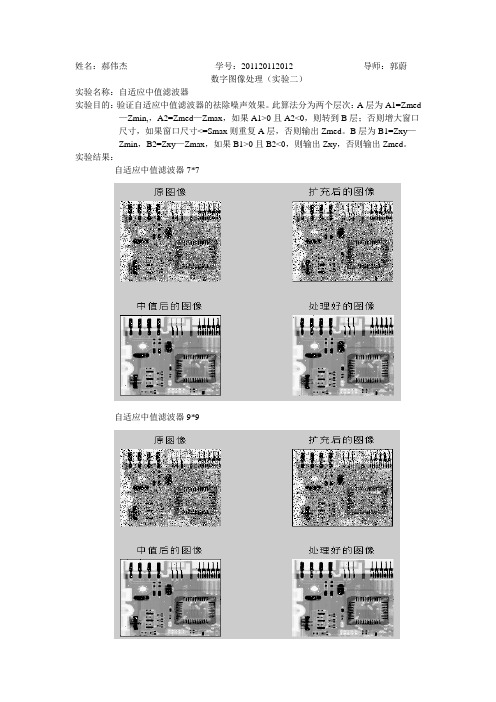
姓名:郝伟杰学号:201120112012 导师:郭蔚数字图像处理(实验二)实验名称:自适应中值滤波器实验目的:验证自适应中值滤波器的祛除噪声效果。
此算法分为两个层次:A层为A1=Zmed —Zmin,,A2=Zmed—Zmax,如果A1>0且A2<0,则转到B层;否则增大窗口尺寸,如果窗口尺寸<=Smax则重复A层,否则输出Zmed。
B层为B1=Zxy—Zmin,B2=Zxy—Zmax,如果B1>0且B2<0,则输出Zxy,否则输出Zmed。
实验结果:自适应中值滤波器7*7自适应中值滤波器9*9自适应中值滤波器11*11结果分析:自适应中值滤波器能够很好的处理图像的细节和边缘,使图像更加细腻,清晰,给人以良好的视觉冲击,但是我做的程序运行起来比较慢,大约三十多秒,所以有待很好的优化,而且模板我限制到了11*11的之后才达到了课本上的效果,究其原因,我认为是图像的差异造成了结果上的差异。
实验程序:function ZSY1zhongzhi(a,n1) %自适应中值滤波器(此算法感觉较为合理!!!!!!!!!!)%椒盐噪声subplot(2,2,1),imshow(a,[]),title('原图像')a=double(a);[m,n]=size(a);n2=n1-1;n3=(n1-1)/2;b=zeros(m+n2,n+n2);for i=1:mfor j=1:nb(i+n3,j+n3)=a(i,j);endendsubplot(2,2,2),imshow(b,[]),title('扩充后的图像')for i=n3+1:m+n3for j=n3+1:n+n3for m1=3:2:n1m2=(m1-1)/2;c=b(i-m2:i+m2,j-m2:j+m2);%使用7*7的滤波器 Zmed=median(median(c));Zmin=min(min(c));Zmax=max(max(c));A1=Zmed-Zmin;A2=Zmed-Zmax;if(A1>0&&A2<0)B1=b(i,j)-Zmin;B2=b(i,j)-Zmax;if(B1>0&&B2<0)b(i,j)=b(i,j);elseb(i,j)=Zmed;end%elsecontinue;endendendendsubplot(2,2,3),imshow(b,[]),title('中值后的图像') d=ones(m,n);for i=1:mfor j=1:nd(i,j)=b(i+m2,j+m2);endendsubplot(2,2,4),imshow(d,[]),title('处理好的图像')。
基于方向的自适应多级中值滤波

类方法 是就 是多级 中值滤 波t l u iae m da 7 ( l t ei 'm t g S s n i e 及其 改进算法【 。多级 中值滤波通过在矩 ft ) lr 9 向的边缘信息得 以保 留,但其 它方 向的边缘则会 变 形 或扭 曲。字 库 中 值滤 波 l (1 rr— ei — l i a m da b y n s c l r 在字库 内设置若干模式 ,由此 能够保 t kft s a ie) 留更 多的图像细节 。还 有新近提 出的峰值 一谷值 中值滤波【 p a.n .a e l r,它基于对最 l ekadv l y ft ) 列( l ie 大值和最 小值 的操作 ,从而达 到保护细节特征 的 目的 。 本文提 出的是一种 多级 中值滤波的 改进 方法 基于方 向的 自 适应多级 中值滤波。此方法能够
Co ue x e me t a e so d i d a tg so e a io a l sa eme infl rn np e evn ni g ’ mp tre p r nsh v h we t a v na e v rt dt n lmut tg da ti g i rs r iga ma eS i s r i i i e e g s ne c i cinmoeefciey a dtesmeefc v bl yt mo t os . d e a hdr t r fe t l, n a fe t ea ii s o n ie i e o v h i t o h Ke r s ywo d :mutsa eme infl r g d n iig l efaue n nie i r g l tg d a ti ; e osn ;i e tr; o l a f t i i i en n nrl e n
10种常用滤波方法
10种常用滤波方法
滤波是信号处理领域中常用的技术,用于去除噪声、增强信号的一些特征或改变信号的频谱分布。
在实际应用中,经常使用以下10种常用滤波方法:
1.均值滤波:将像素点周围邻域像素的平均值作为该像素点的新值,适用于去除高斯噪声和椒盐噪声。
2.中值滤波:将像素点周围邻域像素的中值作为该像素点的新值,适用于去除椒盐噪声和激动噪声。
3.高斯滤波:使用高斯核函数对图像进行滤波,通过调整高斯窗口的大小和标准差来控制滤波效果。
适用于去除高斯噪声。
4.双边滤波:通过考虑像素的空间距离和像素值的相似性,对图像进行滤波。
适用于平滑图像的同时保留边缘信息。
5. 锐化滤波:通过滤波操作突出图像中的边缘和细节信息,常用的方法有拉普拉斯滤波和Sobel滤波。
6.中可变值滤波:与中值滤波相似,但适用于非线性信号和背景噪声的去除。
7.分位值滤波:通过对像素值进行分位数计算来对图像进行滤波,可以去除图像中的异常像素。
8.快速傅里叶变换滤波:通过对信号进行傅里叶变换,滤除特定频率的成分,常用于频谱分析和滤波。
9.小波变换滤波:利用小波变换的多尺度分析特性,对信号进行滤波处理,适用于图像去噪和图像压缩。
10.自适应滤波:通过根据信号的局部特征自动调整滤波参数,适用于信号中存在时间和空间变化的情况。
以上是常见的10种滤波方法,每种方法都有不同的适用场景和优缺点。
在实际应用中,选择合适的滤波方法需要根据具体的信号特征和处理需求来确定。
一种新型自适应中值滤波算法
1 滤波算法实现 与原理分析
1 1 噪 声检 测 .
噪声检测的能力是滤波器性能的一个重要的性能指标 , 直接影响滤波器的去噪 、 漏检率和误检率 。 极 值 的检测噪声方法的弊端就是把非噪声像素点误检为噪声点 。 为了减少漏检和误检的可能性 , 本文采用一
种新的方法实现噪声检测 , 检测依据是图像 中噪声点 的灰度值与其邻域范 围内非噪声点 的灰度值有 比较
r n ≤ 1 7,
=
{ , l a ≤ w 5W < v 2
通过大量的加工大米 的采样发现 , 在光照正常的情况 , 大米灰度图像 中的大米胚芽等部分 的灰度值也为最 大值 , 这样噪声稍微大点 , 仅依靠以上的去噪算法处理 , 文献 [] 1 中大米加工的一些重要指标就无法实现。 针对这个问题 , 作者提出了一种新的 自 适应滤波算法 。测试结果表 明, 采用此方法对 图像进行除噪处 理, 不仅能够抑制噪声 , 同时可以的保留图像边缘以及大米胚芽的灰度等许多重要 的信息。
和最小的像素点 , 即图像 中的灰度值最大或最小的像素点全为噪声点 ; 否则 , 图像 中有信号点被误检为噪 声点( 例如胚芽)被误检为噪声点个数 可以通过下式计算得到 。
Y = ( V— a)x( A v LXM) () 1
其中 LXM表示图像的大小 112 检测窗口 .. 尺度和检测阀值 确定 检测噪声窗 口 尺度和检测阀值 的准确度影响后面的滤波性能和误检率 。 的大小和 死根据估 计噪声密度 a 下误检率最低的原则 自 v 适应确定 ,v a 噪声密度大 , 和 相对较小 ; 耽 否则 和 应取大 点。 令 窗口的长度为 , 通过实验得到 和 与 a 的关系具体如下 : v
Vo.2 . I 8N 2 o
均值滤波和中值滤波
均值滤波与自适应中值滤波的仿真与实现摘要图像是一种重要的信息源,通过图像处理可以帮助人们了解信息的内涵,然而在图像使用和传输过程中,不可避免会受到噪声的干扰,因此为了恢复原始图像,达到好的视觉效果,需要对图像进行滤波操作。
根据噪声种类不同,可以采用不同的滤波方法,均值滤波是典型的线性滤波算法,能够有效滤波图像中的加性噪声,而中值滤波器是能够有效滤除脉冲噪声的非线性滤波器,但传统中值滤波去脉冲噪声的性能受滤波窗口尺寸的影响较大, 在抑制图像噪声和保护细节两方面存在矛盾。
本文首先对不同均值滤波器在处理不同噪声方面的优缺点进行了分析,然后分别用中值滤波器和自适应中值滤波器对被椒盐噪声污染的图像进行了滤波操作,发现自适应中值滤波方法不仅可以有效滤波椒盐噪声,同时还可以有效地克服中值滤波器造成图像边缘模糊的缺点。
1.均值滤波均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素点和其本身像素点。
再用模板中的全体像素的平均值来代替原来像素值。
均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。
线性滤波的基本原理是用均值代替原图像中的各个像素值,即对待处理的当前像素点(x,y),选择一个模板,该模板由其邻近的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(x,y),作为处理后图像在该点上的灰度值g(x,y),即g(x,y)=1/m ∑f(x,y), m为该模板中包含当前像素在内的像素总个数。
均值滤波能够有效滤除图像中的加性噪声,但均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊。
均值滤波主要有算术均值滤波,几何均值滤波,谐波均值滤波以及逆谐波均值滤波,本文只对算术均值滤波,几何均值滤波和逆谐波均值滤波进行研究。
其中几何均值滤波器所达到的平滑度可以与算术均值滤波器相比,但在滤波过程中丢失更少的图象细节。
EMCCD图像自适应模糊中值滤波算法研究
l 5 d B 以上 ; 该 算 法在 低 噪 声密度 情 况下性 能 明显好 于其 他 中值 滤波 器 , 在 高噪 声 密度 情 况下 性 能也
滤 波窗 口内的 中心点进 行噪 声检 测 ; 然后对检 测 为噪 声的像 素点 引入双 阈值 , 并根据 引入 的 阈值和 滤
波 窗 口内的 中值 建立噪 声 点的模糊 隶属 函数 , 根 据模糊 隶属 函数对 噪声 点进行 滤波 处理后 输 出 ; 最后 采 用 自适应 模块调 整待 处理 图像 的像 素 。仿 真及 实验 结果表 明 ,新 算法 不仅 能够有 效地将 图像 中的
第4 2卷 第 l l期
VO 1 . 4 2 NO. 11
红 外 与 激 光 工 程
I n ra f r e d a n d L a s e r En g i n e e r i n g
2 0 1 3年 1 1月
NO V . 2 0 1 3
E MC C D图像 自适 应模 糊 中值 滤 波 算 法研 究
o f uz f z y il f t e in r g mo d ul e a nd a d a p iv t e mo d u l e.Fi r s t ,t h e n o i s e p i x e l s i n t h e c e n t e r o f t h e il f t e r wi n d o w
wa s i d e n t i ie f d.S e c o n d,t h e d o u b l e t h r e s h o l d s we r e i nt ro d u c e d f o r t he s e d e t e c t e d” n o i s e p o i n t s ” ,b a s i n g o n t he t h r e s h o l d s a n d me d i n a o f t h e il f t e in r g wi n d o w ,t he f u z z y me mb e r s h i p f u n c t i o n o f n o i s e p o i n t s wa s p u t or f wa r d,a nd he t f u z z y me mb e r s ip h f u n c io t n wa s u il t i z e d t o il f t e r he t n o i s e p oi n t s .Fi n a l l y,t he a d a p t i v e
自适应中值滤波在数字图像处理中的应用
第29卷 第4期河北理工大学学报(自然科学版)Vol129 No14 2007年11月J ourna l of Hebe i Polytechn ic Un i ver sity(Na tur a l Science Edition)Nov.2007文章编号:1674-0262(2007)04-0111-03自适应中值滤波在数字图像处理中的应用刘伟1,孙丽媛2,王汝梅3(11河北理工大学计算机与自动控制学院,河北唐山063009;21机械工程学院;31冶金与能源学院)关键词:脉冲噪声;自适应中值滤波;掩模摘 要:针对一般中值滤波在滤除脉冲噪声中的不足,提出了自适应中值滤波的方法,论述了其基本原理和具体实现方法,实验证明,此方法对脉冲噪声有很好的滤除效果。
中图分类号:TP391141 文献标识码:A 在数字图像受到噪声污染后,需要对其进行滤波。
针对不同的噪声有不同的滤波方法。
中值滤波对滤除脉冲噪声有很好的效果,但也会损失图像的部分细节,而自适应中值滤波能够在保持图像细节的基础上滤除脉冲噪声。
1 脉冲噪声脉冲噪声也称双极脉冲噪声,它的概率密度函数可由下式给出:P(z)=Pa z=aPb z=b0 其它(1) 如果b>a,灰度值b在图像中将显示为一个亮点,相反,a的值将显示为一个暗点。
若Pa 或Pb为零,则脉冲噪声称为单极脉冲。
脉冲噪声可以是正的,也可以是负的。
标定通常是图像数字化过程的一部分。
因为脉冲干扰通常与图像信号的强度相比较大,因此,在一幅图像中,脉冲噪声总是数字化为最大值(纯黑或纯白)。
这样,通常假设a,b是饱和值,从某种意义上看,在数字化图像中,它们等于所允许的最大值和最小值。
由于这一结果,负脉冲以一个黑点出现在图像中。
由于相同的原因,正脉冲以白点出现在图像中。
对于一个8位图像,这意味着a=0(黑),b=255(白)。
图1为原始图像,图2为受25%双极性脉冲噪声污染的图像。
收稿日期622:20009142 中值滤波中值滤波是一种非线性的空间滤波器,它是将象素邻域内灰度的中值代替该象素的值。
一种变分自适应中值滤波算法
第 2 第 9期 6卷
20 0 6年 9月
文 覃 编 号 :0 1 9 8 ( 0 6 0 —2 5 4 1 0 — 0 1 2 0 ) 9 0 9—
一
计 算机 应 用
Co u e mp tr Appi ains lc to
Vo . 6 No 9 12 .
S p .2 0 et 06
种 变 分 自适 应 中值 滤 波算 法
王 勋 , 笃彦 毕
( 空军工程 大 学 工程 学 院 , 西 西安 7 03 ) 陕 10 8
( a gu @ i .e a ) w n x n e a .n t
摘 要: 针对 自适应 中值和变分滤波方法脉冲噪声去除能力的不足 , 出了一种新的变分 自适应 提 中值滤 波 方 法。首 先采 用 自适应 中值 滤波 器对脉 冲噪 点进行 标 识 , 然后 对标 识 的噪 点 构建 由逼近 条 件和 边缘 保持 正 则化条件 构 成 的代 价 函数 , 通过 变分 方 法对代价 函数寻优 求解 , 对噪 点进行 恢 复。 最 后进 行 了仿 真试验 , 并与标 准 中值 滤 波 , 关 中值 滤 波 , 开 自适 应 中值 滤 波 , 变 分 滤 波 方 法进 行 了比 和 较。试验结果表明, 在信噪比和细节保 留方面明显优 于上述滤波方 法, 以有效去除 高达 9 %的脉 可 0
Ab t a t o i r v h e o ma c f i u s os e u t n e a ai n t o a e n a a t e me i n s r c :T mp o e t e p f r n e o mp le n i rd c o ,a n w v i t a me h d b s d o d p v d a e i l ol i i e a p o e . i , d pi d a l s u e o i e t y t e i u s os . e o d f t rW r p s d F mt a a t e me i n f tr Wa s d t d ni h mp le n ie S c n , a c s u c o f t e l s o v i e f o t f n t n o h i ie t e os ies W e in d d n i d n iyp x l a d sg e ,w ih Wa o o e fd t - d l yt r a d e g - rs ri gr g l r a o em.Thr , i f s h c s c mp s o aa f e t em e p e e vn e u ai t n tr d i i n d zi i d v rain lmeh s s o g t t e p ma ou o h c n mie t e c t f c o d r soe t e os p】 l. a i t a t o Wa u e t e o t l s l t n w ih mi i z o u t n a e tr n iy ie s o d d h i i h s n i n h 【 Smu a o e u t d mo sr t h t o r p p s d meh s o vo l e tr t a t d r d a l r w th n d a i l t n r s s e n t e ta u r o e to i b i u y b t h i l a o d s e n sa a d me i f t , n n i e s i i g me i c n i e .v r i a meh a d p v d a t .a d C e a e a mu h a 9 % i u s os f tr a it n t o d a a t e me in fl r n a rs c 0 l a ol d n i i e n s s mp le n ie Ke r s d p ie me i l r e g r s ri g p t ni n t n e u aia o e ; v ra o a t o y wo d :a a t d a f t ; d e p e ev n oe t f c i ;r g lrz t n t r v n i e l a u o i m ai t n lme d i h
自适应中值滤波算法滤除医学图像脉冲噪声_宁春玉
2 自适应中值滤波算法 2.1 脉冲噪声特点
脉冲噪声是由于传感器、 解码器处理等所产生 的脉冲在图像中产生的一些灰度值很小 (接近黑色) 或灰度值很大 (接近白色) 的随机噪声。脉冲噪声的 灰度是该点正常灰度与噪声灰度的叠加, 其在灰度 特征上与周围相邻像素点有较明显的区别, 一般是 其邻域中的灰度极值点 (正的或负的极值) 。 图像中脉冲噪声的概率密度函数 (PDF) 可由下 式描述: ì pa, z = a ï P ( z) = í p b , z = b ï î0, otherwise 如果 b > a , 灰度值 b 在图像中将显示为一个亮
f ( x y) = median{g(s t)}
(s t) Î s xy ^ ^
虽然传统中值滤波在抑制噪声的同时能较好地 保护图像的边缘细节, 但该滤波窗口 s xy 一旦选定, 即对所有像素均采用同一模板进行处理, 而不考虑 窗口范围内噪声点的多少。 本文从虚拟内窥镜系统运算时间考虑, 并参考 文献[12], 采用滤波窗口自适应的方法来滤除医学图 像数据中含有的脉冲噪声。该滤波器的滤波方式和 传统的中值滤波器一样, 都是利用 m ´ n 矩形区域窗 口 s xy 定义的区域内图像的统计特性。不同的是在 滤波过程中, 自适应滤波器会根据一定的设定条件, 充分考虑图像中不同区域受脉冲噪声污染的程度不 同而自适应地改变滤波窗口的大小。 设 g xy 为像素点 ( x y) 的灰度值,g min 为滤波窗
宁春玉, 赵春华: 自适应中值滤波算法滤除医学图像脉冲噪声
2012了非脉冲噪声, 从而减少不必要的边界细 化或粗化等损失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
clear; I=imread('I3_256.bmp'); I=imnoise(I,'salt & pepper', 0.7); imshow(I) figure; M=I; num=1; I=double(I); M=double(M); flag11=1; H=512; L=512; for i=1:H for j=1:L flag(i,j)=1; end end
• omiga=2 是最大滤波半 径 • 恒为一 一直执行 • 左右上下扩大窗口
• • • • 滤窗的最大值Smax 要随着噪声的空间密度大 小的变化而进行调整,一般来 说,噪声的空间密度大,选择 Smax也要适当地大一些
• • • •
扩大窗口 但不出边界 i为1、2、3时zuo都是1 , 便是为了不出边界 xia、shang、you同理
% i横坐标 %j纵坐标 • for i=1:H %大循环 • for j=1:L %大循环 • omiga=2; • %%%%%%%%确定窗口 • while flag(i,j)==1 • zuo=i-omiga; • xia=j-omiga; • you=i+omiga; • shang=j+omiga; • if zuo<1 • zuo=1; • end • if xia<1 • xia=1; • end • if you>L • you=L; • end • if shang>H • shang=H; • end • %%%%%%%窗口确定结束
I(i,j)=smed;
flag(i,j)=0; end
得到清晰地像素点 过滤掉噪 声点
• • • • • • • • • • • • • • • •
else omiga=omiga+2; if omiga>=5 flag11=0; end if omiga>=17 flag11=0; M(i,j)=smed; flag(i,j)=0; end end end%while end%大循环 end%大循环 I=uint8(M); imshow(I);
中值滤波的基本原理是把数字图 像或数字序列中一点的值用 该点的一个邻域中各点值的 中值代替,让周围的像素值 接近的真实值,从而消除孤 立的噪声点。
• • • • • • • • •
清除工作空间的变量 输入图像 加入椒盐噪声点 密度0.7 显示图像 控制窗口数量 先显示一个 赋给M 确定精度 提高精度 11 是(1,1)是开始的点 H为高,L为长 像素512*512
给smin、smax初始化 totalshi放大后的像素点的个 数 zuo:you xia:shang 为横纵 向扫描 “与” 00、01、10 满足if 把灰度值赋给vect1
%%nanmin 包含缺失值的样 本的最小值 nanmax 包含缺失值的样本 的最大值 %%nanmedian 包含缺失值 的样本的中值
%%%%%%%%%%%确定最大最小 值 smin=I(i,j); smax=I(i,j); total=(you-zuo+1)*(shang-xia+1); vect1=zeros(1,total-1); kn=1; for in=zuo:you for jn=xia:shang if ((in==i&jn==j)==0) vect1(1,kn)=I(in,jn); kn=kn+1; end end end smin=nanmin(vect1); smax=nanmax(vect1); smed=nanmedian(vect1);
if (smed-smin)>0&(smax-smed)>0
• v
if smin<M(i,j)&M(i,j)<smax flag(i,j)=0; else M(i,j)=smed;
如果像素点的灰度值介于 最大最小之间 则 flag 标记为零 值不变
else 把中值赋给像素点 输出 flag标记为零
• •
否则扩大窗口 继续扫描 继续选择
• • •
8位的无符号整形数据,取值 范围从0到255 0是黑 255是白 输出过滤后图像