双目立体视觉区域局部匹配算法的改进及其实现
双目立体视觉区域局部匹配算法的改进及其实现

双目立体视觉区域局部匹配算法的改进及其实现作者:何人杰来源:《现代电子技术》2009年第12期摘要:匹配算法是双目立体视觉中关键技术之一。
这里讨论双目立体视觉区域局部匹配的相似性测度函数、局部相关匹配算法,并分析其复杂度,进而提出模板滑动的匹配算法。
在VC++平台上,通过双相机实验系统的标准测试图及实际场景图对所提方法进行验证。
分析和实验结果都表明了该改进算法的有效性和快速性。
关键词:双目立体视觉;区域相关;立体匹配;标准测试图中图分类号:TP391文献标识码:A文章编号:1004-373X(2009)12-068-03Improvement of Regional Related Match Algorithm forBinocular Stereo Vision and Its ImplementationHE Renjie(Electronics and Information School,Northwestern Polytechnica l University,Xi′an,710129,China)Abstract:Match algorithm is one of key techniques in the binocular stereo vision system.The similarity functions,the regional related match algorithms for Binocular stereo vision are discussed and the algorithmic complexity is analyzed.Moreover,a new improved regional related match algorithm by sliding pattern plate is proposed to decrease the matching time and a test software is designed by using VC++ and OPEN-CV.A number of experiments are carried out through the two-camera system and the standard test images as well as practical sense images.The analytical and experimental results show that the improved method is effective and its matching time is decreased greatly.Keywords:binocular stereo vision;regional related;stereo match;standard test image0 引言立体视觉是计算机视觉的一个重要分支,主要研究如何借助成像技术从图像中获取场景中物体的三维信息[1-3] 。
《双目立体视觉三维重建的立体匹配算法研究》

《双目立体视觉三维重建的立体匹配算法研究》一、引言双目立体视觉技术是计算机视觉领域中的一项重要技术,其通过模拟人类双眼的视觉系统,利用两个相机从不同角度获取场景的图像信息,进而实现三维重建。
而立体匹配算法作为双目立体视觉三维重建中的关键技术,其准确性和效率直接影响到三维重建的效果。
本文旨在研究双目立体视觉三维重建中的立体匹配算法,分析其原理、优缺点及改进方法,为进一步优化三维重建效果提供理论支持。
二、双目立体视觉原理双目立体视觉原理基于视差原理,即通过两个相机从不同角度拍摄同一场景,获取场景的左右两个视图。
通过分析这两个视图中的像素对应关系,可以计算出场景中各点的三维坐标,从而实现三维重建。
其中,立体匹配算法是获取像素对应关系的关键。
三、立体匹配算法研究3.1 算法概述立体匹配算法是双目立体视觉三维重建中的核心算法,其主要任务是在左右视图中寻找对应点。
常见的立体匹配算法包括基于区域、基于特征和基于相位的方法。
这些方法各有优缺点,适用于不同的场景和需求。
3.2 基于区域的立体匹配算法基于区域的立体匹配算法通过计算左右视图中的像素灰度或颜色差异来寻找对应点。
该方法具有较高的匹配精度,但计算量大,易受光照、噪声等因素的影响。
常见的基于区域的立体匹配算法包括块匹配法、区域生长法等。
3.3 基于特征的立体匹配算法基于特征的立体匹配算法通过提取左右视图中的特征点(如角点、边缘等),然后根据特征点的相似性进行匹配。
该方法具有较高的鲁棒性,对光照、噪声等有一定的抵抗能力。
常见的特征提取方法包括SIFT、SURF等。
3.4 算法优缺点及改进方法每种立体匹配算法都有其优缺点。
例如,基于区域的算法精度高但计算量大;基于特征的算法鲁棒性高但可能丢失部分细节信息。
针对这些问题,研究者们提出了多种改进方法,如结合多种算法的优点进行融合匹配、优化特征提取和匹配策略等。
此外,随着深度学习和人工智能的发展,基于深度学习的立体匹配算法也逐渐成为研究热点,其在复杂场景下的匹配效果有了显著提升。
基于双目视觉的立体匹配算法优化研究
基于双目视觉的立体匹配算法优化研究随着科技的不断发展,立体视觉技术受到越来越多的关注。
而在立体视觉技术中,双目视觉是最为常见的一种。
双目视觉建立在人类视觉的基础之上,通过两只眼睛的不同视角来实现对物体的三维立体感知。
同时,对于计算机视觉领域来说,利用双目视觉也可以实现对三维物体的自动检测、识别和定位等诸多任务。
因此,针对基于双目视觉的立体匹配算法进行优化研究,具有重要的理论和应用意义。
一、双目视觉技术的基本原理双目视觉技术是通过将两个相机摆放在一定距离上,同时拍摄同一场景来获取立体图像。
左右相机之间的距离也称为基线,两个相机成像的图像之间存在着视差,即同一场景在两个成像平面上的像素点之间的距离差。
而这个视差大小与物体的深度是相关的。
因此,我们可以通过计算两个成像平面上像素点的视差,来计算物体的三维坐标。
二、立体匹配算法的基本原理立体匹配算法是通过计算左右两幅图像之间像素点的匹配程度,来实现对物体的三维重建。
立体匹配算法通常分为两个步骤:提取特征和进行匹配。
其中,特征提取是指从左右两幅图像中提取出关键的特征点,如角点和边缘等。
在特征提取之后,我们需要进行特征匹配,也就是对两副图像中的特征点进行匹配,找到它们的共同点。
而这个特征点的匹配程度,我们可以通过计算它们的相似度来进行评价。
最后,我们可以利用一些算法来计算每个像素点的视差,从而实现三维重建。
三、双目视觉技术存在的问题在实际应用中,双目视觉技术存在一些问题。
例如,由于环境中光照条件的不同,左右两个成像平面的亮度可能存在差异,从而影响了立体匹配算法的准确性。
同时,在大场景三维重建的过程中,匹配误差也可能会较大,从而导致重建效果不佳。
四、立体匹配算法的优化方向为了克服上述问题,我们需要对基于双目视觉的立体匹配算法进行优化。
目前,已经有许多研究展开,包括但不限于以下几个方向:1. 深度学习技术的应用随着深度学习技术的不断发展,越来越多的学者开始探索将深度学习技术应用于立体匹配算法中。
《基于双目视觉的立体匹配算法研究及应用》范文
《基于双目视觉的立体匹配算法研究及应用》篇一一、引言随着计算机视觉技术的不断发展,双目视觉技术已成为三维重建、机器人导航、自动驾驶等领域的重要技术手段。
其中,立体匹配算法是双目视觉技术的核心,其精度和稳定性直接影响着双目视觉系统的性能。
本文将介绍基于双目视觉的立体匹配算法的研究现状、原理及应用,并探讨其在实际应用中的优化与改进。
二、双目视觉的立体匹配算法研究1. 算法概述双目视觉的立体匹配算法是通过分析两个相机从不同视角获取的图像,从而恢复出场景的三维信息。
立体匹配算法主要包括特征提取、特征匹配和视差计算三个步骤。
其中,特征提取是提取出两幅图像中的有用信息,特征匹配则是根据一定的匹配准则,将两幅图像中的特征进行匹配,最后通过视差计算得到场景的三维信息。
2. 算法原理立体匹配算法的原理是基于视差原理,即同一场景从不同视角观察时,物体在左右图像中的位置会有所偏差。
通过比较两幅图像中对应位置的像素或特征,可以计算出视差,从而得到场景的三维信息。
在特征提取阶段,算法会提取出两幅图像中的关键点或特征描述符,如SIFT、SURF等;在特征匹配阶段,算法会根据一定的匹配准则,如欧氏距离、互信息等,将两幅图像中的特征进行匹配;在视差计算阶段,算法会根据匹配结果计算出视差图,从而得到场景的三维信息。
三、立体匹配算法的应用双目视觉的立体匹配算法在多个领域得到了广泛应用。
在机器人导航领域,可以通过双目视觉系统实现机器人的三维环境感知和避障;在自动驾驶领域,可以通过双目视觉系统实现车辆的自主驾驶和道路识别;在三维重建领域,可以通过双目视觉系统实现场景的三维重建和模型构建。
此外,立体匹配算法还可以应用于虚拟现实、人机交互等领域。
四、立体匹配算法的优化与改进针对立体匹配算法在实际应用中存在的问题,如匹配精度低、计算量大等,研究人员提出了多种优化与改进方法。
首先,可以通过改进特征提取算法,提取出更鲁棒、更丰富的特征信息;其次,可以通过优化匹配准则和匹配策略,提高匹配精度和计算效率;此外,还可以通过引入深度学习等技术,实现更准确的特征匹配和视差计算。
《基于双目视觉的立体匹配算法研究及应用》范文
《基于双目视觉的立体匹配算法研究及应用》篇一一、引言随着计算机视觉技术的飞速发展,双目视觉立体匹配算法在三维重建、机器人导航、自动驾驶等领域得到了广泛应用。
本文旨在研究基于双目视觉的立体匹配算法,探讨其原理、方法及实际应用,以期为相关领域的研究提供参考。
二、双目视觉立体匹配算法原理双目视觉立体匹配算法是通过模拟人类双眼视觉原理,利用两个相机从不同角度获取场景的图像信息,通过计算两幅图像间的视差,从而恢复出场景的三维信息。
立体匹配是双目视觉的核心问题,其基本原理包括特征提取、特征匹配、视差计算等步骤。
1. 特征提取:在两幅图像中提取出具有代表性的特征点,如角点、边缘点等。
这些特征点将用于后续的匹配过程。
2. 特征匹配:利用一定的匹配算法,如基于区域的匹配、基于特征的匹配等,在两幅图像中寻找对应的特征点。
3. 视差计算:根据匹配得到的特征点,计算视差图。
视差图反映了场景中各点在两幅图像中的相对位移,从而可以恢复出场景的三维信息。
三、立体匹配算法研究针对双目视觉立体匹配算法,本文重点研究了以下几种方法:1. 基于区域的匹配算法:该类算法通过计算两幅图像中对应区域的相似性来寻找匹配点。
常见的区域匹配算法包括块匹配、窗口匹配等。
2. 基于特征的匹配算法:该类算法通过提取图像中的特征点,如角点、边缘点等,进行特征匹配。
常见的特征匹配算法包括SIFT、SURF等。
3. 视差计算优化方法:为了提高视差计算的精度和效率,研究者们提出了多种优化方法,如引入先验知识、利用多尺度信息、采用半全局匹配算法等。
四、立体匹配算法应用双目视觉立体匹配算法在多个领域得到了广泛应用,如三维重建、机器人导航、自动驾驶等。
本文将重点介绍其在以下两个领域的应用:1. 三维重建:通过双目视觉立体匹配算法,可以恢复出场景的三维信息,从而实现三维重建。
三维重建技术在游戏开发、虚拟现实、医疗影像处理等领域具有广泛应用。
2. 自动驾驶:双目视觉立体匹配算法可以用于自动驾驶系统的环境感知。
改进的双目立体视觉算法及其应用
第38卷第3期2017年3月哈尔滨工程大学学报Journal o!Harbin Engineering UniversityVol.38No.3Mar.2017改进的双目立体视觉算法及其应用苍岩,尹凤鸣,毕晓君(哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨150001)摘要:为了提高双目立体视觉算法正确匹配率,本文改进了特征点提取及立体匹配算法。
特征点提取部分,定义了尺度方向不变角点;在匹配计算部分,利用极线约束计算特征点的候选匹配角点,采用视差梯度约束和最大向量角准则多约束条件实现精确匹配。
对本文的改进算法进行了实验室以及水池试验验证:实验室中采集小盒图片;水池试验中,拖车带动船模在试验水池航行时,采集船后部的波浪图片。
实验结果显示,改进算法在水池实验图片处理中的正确匹配率比尺度不变特征变换(SIFT)算法高14%。
关键词:双目视觉;SIFT算法;角点检测;测量;特征提取;匹配算法D O I:10.11990/jheu.201603076网络出版地址:http://w w /kcms/d e t a i l/23.1390.u.20170111. 1443.002.html中图分类号:TP911文献标志码:A文章编号=1006-7043(2017)03-0465-06Improvement and application of a binocular stereo vision algorithmCANG Yan,YIN Fengming,BI Xiaojun(College o!Inlonnation and Communication Engineering,Harbin Engineering University,Harbin150001,China)Abstract :This paper aims at improving the feature point extraction and stereo match algorithm to increase the right matching rate ol binocular stereo vision.For the feature point extraction,w e defined corners with a fixed scale and direction.To calculate the stereo match algorithm,a pole line constraint was used to match the corners.A disparity gradient constraint and m a x i m u m vector angle criterion were combined as a multi-constraint condition to determine a one-to-one exact match.A box image collected in the lab room and wave images generated by a ship model towed by a trailer in the experiment pool were used as objects to test the proposed algorithm.The results show that the correct match rate ol the proposed algorithm i s 14% higher than the scale invariant feature transform (S I F T)algorithm.Keywords :binocular vision;scale invariant feature transform (SI F T);corner detection;measurement;feature extraction;match algorithm双目立体视觉是机器视觉的一种重要形式。
《2024年基于双目视觉的立体匹配算法研究及应用》范文

《基于双目视觉的立体匹配算法研究及应用》篇一一、引言随着计算机视觉技术的快速发展,双目视觉立体匹配算法成为了计算机视觉领域中一项重要的研究方向。
该算法通过对双目相机捕获的图像进行匹配处理,可以获取物体的三维空间信息,进而实现物体的定位、识别、跟踪等功能。
本文将基于双目视觉的立体匹配算法进行深入研究,探讨其基本原理、研究现状、存在问题及改进措施,并分析其在现实生活中的应用场景和效果。
二、双目视觉的立体匹配算法基本原理双目视觉的立体匹配算法是基于两个不同视角下的图像信息进行立体匹配的过程。
首先,双目相机通过拍摄同一场景获取两个具有视差的图像;然后,利用图像处理技术对这两个图像进行特征提取和匹配;最后,根据匹配结果和两个相机之间的相对位置关系,计算得到物体在三维空间中的位置信息。
三、双目视觉的立体匹配算法研究现状及存在问题目前,双目视觉的立体匹配算法已经得到了广泛的研究和应用。
然而,在实际应用中仍存在一些问题。
首先,由于光照、遮挡、噪声等因素的影响,导致图像中的特征点难以准确提取和匹配;其次,对于复杂的场景和动态的物体,现有的算法仍难以实现高效的匹配;此外,对于立体匹配结果的精度和稳定性也仍需进一步提高。
四、基于改进的立体匹配算法针对上述问题,本文提出一种基于改进的立体匹配算法。
该算法通过引入多尺度特征融合、全局上下文信息等手段,提高特征点的提取和匹配精度;同时,采用优化后的视差估计和优化算法,进一步提高立体匹配结果的精度和稳定性。
具体而言,我们可以通过以下几个步骤来实现这一改进算法:1. 特征提取:采用多尺度特征融合的方法,将不同尺度的特征信息融合在一起,从而提高特征点的提取精度和稳定性。
2. 特征匹配:利用全局上下文信息,提高特征点的匹配精度。
通过计算每个特征点在周围区域内的上下文信息,进一步约束特征点的匹配结果。
3. 视差估计:采用优化后的视差估计方法,根据两个相机之间的相对位置关系和特征点的匹配结果,计算物体的视差信息。
《基于双目视觉的立体匹配算法研究及应用》
《基于双目视觉的立体匹配算法研究及应用》篇一一、引言随着计算机视觉技术的不断发展,双目视觉技术作为一种重要的三维信息获取手段,已经广泛应用于机器人导航、三维重建、物体识别和虚拟现实等领域。
而立体匹配作为双目视觉技术的核心问题,其算法的优劣直接影响到双目视觉系统的性能。
因此,本文旨在研究基于双目视觉的立体匹配算法,并探讨其在实际应用中的效果。
二、双目视觉系统概述双目视觉系统通过模拟人眼的视觉机制,利用两个相机从不同角度获取场景的图像信息,然后通过立体匹配算法对两幅图像进行匹配,从而恢复出场景的三维信息。
双目视觉系统主要由相机标定、图像获取、立体匹配和三维重建四个部分组成。
三、立体匹配算法研究3.1 立体匹配算法概述立体匹配是双目视觉系统的核心问题,其目的是在两幅图像中找到对应的特征点。
常见的立体匹配算法包括基于区域的匹配算法、基于特征的匹配算法和基于相位的匹配算法等。
3.2 基于双目视觉的立体匹配算法本文研究了一种基于双目视觉的立体匹配算法,该算法通过提取两幅图像中的特征点,然后利用特征点的相似性进行匹配。
在特征提取阶段,采用SIFT算法提取图像中的关键点,并计算关键点的描述子。
在匹配阶段,利用描述子之间的相似性进行匹配,并通过一定的约束条件剔除错误匹配点。
3.3 算法优化及性能分析针对立体匹配算法中的错误匹配问题,本文提出了一种基于视差连续性和唯一性的优化方法。
通过引入视差连续性和唯一性约束,可以有效地剔除错误匹配点,提高匹配精度。
同时,本文对算法的性能进行了分析,包括算法的时间复杂度和空间复杂度等方面。
四、应用研究4.1 三维重建应用通过将本文研究的立体匹配算法应用于三维重建领域,可以有效地恢复出场景的三维信息。
本文采用多个相机从不同角度获取场景的图像信息,然后利用本文研究的立体匹配算法对图像进行匹配,并采用三维重建算法恢复出场景的三维模型。
4.2 机器人导航应用本文还将研究的立体匹配算法应用于机器人导航领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
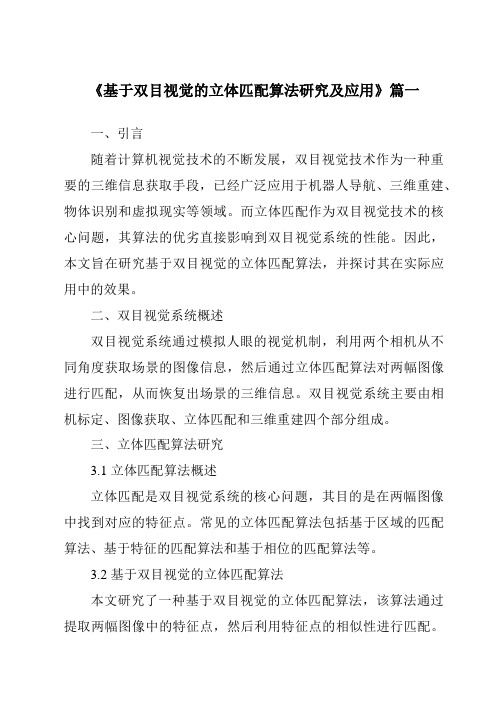
图1局部相关算法原理示意图
1.3局部相关匹配算法的时间复杂度
在图1(a)中坐标为(z,y)的像素点,算法要计算
图1(b)中所有相关像素的相似性。根据极线约束以及
视差约束,在图1(b)中只需计算同一极线上,视差范围
内的像素相似性即可,需要的计算量为:
T(。.v)=d。,行2
(1)
式中:rl为正方形窗口边长;d。,为最大视差。设W为图
算法实时性有了较大提升。
2双目立体视觉区域局部匹配算法的实现
2.1 实验环境 该研究的实验主要是通过计算机编程实现区域局
部匹配算法,并在双相机系统上利用标准和实际场景图 像进行验证性实验的。以VC++6.0及oPENCV为编 程环境,完成验证软件设计。
该研究的验证实验使用了西安交通大学系统工程 所的实验设备(如图2所示)。丽只摄像机平行放置,其 位置姿态参数已由标定结果给出,如表2所示。
根据匹配基元的不同,现有的立体匹配方法可大致 分为三类:基于特征的匹配‘4矗],基于区域的匹配‘63和 基于相位的匹配【7]。
本文重点研究双目视觉立体匹配中基于区域的局 部匹配算法,对基于SAD(Sum of Absolute Difference) 的区域匹配算法通过模板滑动进行了改进。经分析和 多次实验结果表明,该改进算法具有有效性和快速性。
[8]Cyganek B,Borgosz J.A Comparative Study of Performance
and Implementation of SomeArea—based StereoAlgorithms [A]·CAIP[C]·2001,21(24):709—716·
[9]夏永泉·计算机视觉中双目匹配相关技术的研究[D]·南京:
通过SAD约束计算能匿最小匹配点
通过畦艇^计霄街纠的税差. 获铂整幅l冬I的税置图
3结语
这里对双目立体视觉中的区域局部匹配算法进行 讨论,对现有SAD算法进行了改进,较显著地提高了匹 配速度。在实验平台上较好地完成了对标准图像及现 实场景图像的视差图获取,验证了算法的有效性和快 速性。
对卉右图像进行采样 创建模板,x.Ni蹦进行搜索
场景图对所提方法进行验证。分析和实验结果都表明了该改进算法的有效性和快速性。
关键词:双目立体视觉;区域相关,立体匹配;标准测试图
中图分类号:TP391
文献标识码:A
文章编号:1004—373X(2009)12—068—03
Improvement of Regional Related Match Algorithm for Binocular Stereo Vision and Its Implementation
由之前的计算结果得到,有迭代公式:
P(x+1,Y,d)一P(x,Y,d)+[I fL(z+竹+1,y)一
JR(z+打+1+d,y)I—I JL(z一以,y)一
JR(z一,l+d,y)I]
(3)
即在模板滑动时,不需要重新计算整个窗口的
SAD,而只需计算薪的一列SAD。分析可知,改进后算
法的时间复杂度由O(WHd。。n2)降为O(WHd。。咒),
参考文献
I-1]章毓晋.图像工程(下册)图像理解i-M].2版.北京:清华大 学出版社,2007.
[2]何明一,卫保国.数字图像处理[M].北京:科学出版
社,2008.
[3]游素亚.立体视觉研究的现状与进展[J].中国图像图形学
报,1997,2(1):1—2.
[4]Hajar Sadeghi,Payman Moallem。Monadjemi S A.Feature
像的宽度;H为图像的高度,对于整幅图片,全部相似
性的计算量为:
T一
∑ 丁“D—WHd。。,z2
(2)
0≤i<W.0≤j<H
易知,局部相关匹配算法的时间复杂度为
O(WHd。,恕2)。
1.4局部相关匹配算法的改进
若假设匹配窗口的边长为2,z+1,对于每行像素,
H
其相似性测度函数为P(x,Y,d)一∑I IL(工+i,y)一
收稿日期:2008—09—11 68
万方数据
1双目立体视觉区域局部匹配的理论基础
1.1相似性测度函数 匹配算法的实质就是估计待匹配点和候选匹配点
之间的相似性程度,评价这种相似性程度度量方法有多 种。由于单个像素点所包含的信息太少,因而只依据单 个像素点是的信息建立度量方法可靠性较差。为了提 高相似性度量方法的可靠性,一般需要在匹配点上的一 个小邻域内的像素点集合中进行。
局部相关匹配算法是以基准图像中待匹配点为中 心像素来创建一个大小为”×It/的矩形窗,由该窗口内
的像素灰度分布来表征该像素。在第二幅图像中,沿极
线在视差范围内取出与基准点邻域同样大小为挖×力的
像素邻域,依次与匹配点的窗口进行比较,最大相似性
对应的点就是最佳匹配。整个匹配过程如图1所示。
襄1几种相似性测度函数
卉,\
r耥i
图3 系统算法流程图 2.3 实验结果
部分实验结果如图4所示。
图4 实验结果
由图4可知n0],实验得到的图片较好地完成了对 现实场景中的匹配,可以较直接地从所得视差图中获得 物体的深度信息。
同时,图像边缘处的匹配精度受到图像边界的影
。螺葺较奎,真实罂图片中噪声较大,导致误匹配较
多。如何减少误差,提高精度是现在和今后重点考虑的 问题之一。
万方数据
图2试验系统
表2相机标定参数表{以像素为单位)
参数指标
左相机
右相机
焦距
699.85
696.15
相机中心
[392.34 283.94]
[389.26 308.18]
畸变
[一o.270 20 0.454 483[一o.239 75 0.256 22]
旋转角/rad
口=0.013 77,口一0.001 07,y一0.000 38
名称
公式
SAD
∑
J1.(z+i,y+』)一IR(x+dz+f,y+』)
‘I·j)∈U
∑I[JlJ(z+f,y+J)一五ij石-]一
ZSAD
‘‘·j)∈U
[IR(x+以+f,Y+J)一五ii干刁万]
SSD
∑[JIJ(z+i,y+J)一IR(z+d,+f,y+J)]2
∑[11,(z+i,,+J)一i了而]一
ZSSD ‘f·j)∈U [IR(x+以+i,Y+,)--—IR(X+—d.,y)]2
∑[JI.(z+i,,+J)一JR(z+d,+i,y+,)]2
^/∑IL(z+i,y+,)2∑IR(x+d,+f.y+J)2
V(i·J,EU
ti,J)∈U
SCP
∑Ii,(z+i,y+j)IR(X+以+i,y+J)
JR(z+i+d,3,)I;在模板向右滑动时,P(x+1,Y,d)可
双目立体视觉区域局部匹配算法的改进及其实现
何人杰
(西北工业大学电子信息学院陕西西安710129)
摘要:匹配算法是双目立体视觉中关键技术之一。这里讨论双目立体视觉区域局部匹配的相似性测度函数、局部相
关匹配算法,并分析其复杂度,进而提出模板滑动的匹配算法。在VC++平台上,通过双相机实验系统的标准测试图及实际
tiple Cameras with Disjoint Views[A].Ninth IEEE Interna— tional Conference on Computer Vision[C].2003(2):
相对位移/mm
tl一87.921,t2—1.205,t3—4.980
摄像机与处理计算机之间通过双1394总线连接, 计算机中配备2块64位PCI一1394卡,以适应摄像机 高速图像流的要求。摄像机的主要参数如表3所示。
衰3摄像机参数
摄像机特性 CCD传感器 CCD最大像素
参数 Sony Progressive Scan CCDs
HE Renjie
(Electronics and Information schooI.Northwestern Polytechnical University,Xi’an,710129,China)
Abstract:Match algorithm is one of key techniques in the binocular stereo vision system.The similarity functions,the re— gional related match algorithms for Binocular stereo vision are discussed and the algorithmic complexity is analyzed.Moreover, a new improved regional related match algorithm by sliding pattern plate is proposed to decrease the matching time and a test software is designed by using VC++and OPEN—CV.A number of experiments are carried Out through the two—camera sys— tem and the standard test images as well as practical sense images.The analytical and experimental results show that the im— proved method is effective and its matching time is decreased greatly.
[10]南三三茹箍est眦渊。‰R雠眦h[EB伽
。