基于双目视觉的深度图立体匹配算法研究改进
双目立体视觉区域局部匹配算法的改进及其实现

双目立体视觉区域局部匹配算法的改进及其实现作者:何人杰来源:《现代电子技术》2009年第12期摘要:匹配算法是双目立体视觉中关键技术之一。
这里讨论双目立体视觉区域局部匹配的相似性测度函数、局部相关匹配算法,并分析其复杂度,进而提出模板滑动的匹配算法。
在VC++平台上,通过双相机实验系统的标准测试图及实际场景图对所提方法进行验证。
分析和实验结果都表明了该改进算法的有效性和快速性。
关键词:双目立体视觉;区域相关;立体匹配;标准测试图中图分类号:TP391文献标识码:A文章编号:1004-373X(2009)12-068-03Improvement of Regional Related Match Algorithm forBinocular Stereo Vision and Its ImplementationHE Renjie(Electronics and Information School,Northwestern Polytechnica l University,Xi′an,710129,China)Abstract:Match algorithm is one of key techniques in the binocular stereo vision system.The similarity functions,the regional related match algorithms for Binocular stereo vision are discussed and the algorithmic complexity is analyzed.Moreover,a new improved regional related match algorithm by sliding pattern plate is proposed to decrease the matching time and a test software is designed by using VC++ and OPEN-CV.A number of experiments are carried out through the two-camera system and the standard test images as well as practical sense images.The analytical and experimental results show that the improved method is effective and its matching time is decreased greatly.Keywords:binocular stereo vision;regional related;stereo match;standard test image0 引言立体视觉是计算机视觉的一个重要分支,主要研究如何借助成像技术从图像中获取场景中物体的三维信息[1-3] 。
基于双目立体视觉的深度感知技术研究共3篇
基于双目立体视觉的深度感知技术研究共3篇基于双目立体视觉的深度感知技术研究1随着计算机科学技术的不断发展,双目立体视觉深度感知技术成为研究的热点之一。
本文将阐述该技术的发展历程和应用情况,并探讨当前的研究进展和发展趋势。
一、发展历程早期的双目立体视觉技术主要是通过人工对图像进行匹配来获取深度信息。
这种方法需要大量的人工投入,且匹配结果依赖于操作员的经验和技能,难以应用于实际生产中。
为了解决这一问题,研究者开始采用计算机算法来进行深度感知。
二、应用情况1. 机器人导航双目立体视觉技术在机器人导航中得到了广泛的应用。
机器人可以通过摄像机获取环境深度信息,从而避开障碍物,按照预设路径进行移动。
2. 三维建模双目立体视觉技术可以用于三维场景的建模。
通过获取物体的深度信息,可以建立物体的三维模型,从而更好地理解其形状和结构。
3. 自动驾驶技术自动驾驶技术需要实时获取道路和控制车辆的距离信息。
双目立体视觉技术可以快速获取道路和障碍物的深度信息,从而实现车辆的自动行驶。
三、研究进展1. 基于神经网络的深度感知近年来,研究者开始采用神经网络算法来提高双目立体视觉技术的准确度和效率。
神经网络可以自动学习和提取深度特征,并可用于深度估计和场景重建。
此外,神经网络还可以通过增加训练数据进行模型优化。
2. 基于时间维度的深度感知时间开销是双目立体视觉技术中的瓶颈之一。
针对这一问题,研究者开始将时间维度引入到深度感知中。
该方法可以在时间和空间上对图像进行标定,从而提高双目立体视觉技术的速度和准确度。
3. 基于多传感器的深度感知双目立体视觉技术只能在有光线的条件下正常工作。
为了提高深度感知在不同环境下的准确度和鲁棒性,研究者开始探索多传感器融合技术。
该技术可以融合不同传感器获取的信息,从而更好地理解物体的深度和形状。
四、发展趋势随着双目立体视觉技术的不断进步,研究者开始探索其应用范围的拓展。
未来,双目立体视觉技术将会更好地与其他技术结合使用,例如虚拟现实、增强现实等。
《双目立体视觉三维重建的立体匹配算法研究》

《双目立体视觉三维重建的立体匹配算法研究》一、引言双目立体视觉技术是计算机视觉领域中的一项重要技术,其通过模拟人类双眼的视觉系统,利用两个相机从不同角度获取场景的图像信息,进而实现三维重建。
而立体匹配算法作为双目立体视觉三维重建中的关键技术,其准确性和效率直接影响到三维重建的效果。
本文旨在研究双目立体视觉三维重建中的立体匹配算法,分析其原理、优缺点及改进方法,为进一步优化三维重建效果提供理论支持。
二、双目立体视觉原理双目立体视觉原理基于视差原理,即通过两个相机从不同角度拍摄同一场景,获取场景的左右两个视图。
通过分析这两个视图中的像素对应关系,可以计算出场景中各点的三维坐标,从而实现三维重建。
其中,立体匹配算法是获取像素对应关系的关键。
三、立体匹配算法研究3.1 算法概述立体匹配算法是双目立体视觉三维重建中的核心算法,其主要任务是在左右视图中寻找对应点。
常见的立体匹配算法包括基于区域、基于特征和基于相位的方法。
这些方法各有优缺点,适用于不同的场景和需求。
3.2 基于区域的立体匹配算法基于区域的立体匹配算法通过计算左右视图中的像素灰度或颜色差异来寻找对应点。
该方法具有较高的匹配精度,但计算量大,易受光照、噪声等因素的影响。
常见的基于区域的立体匹配算法包括块匹配法、区域生长法等。
3.3 基于特征的立体匹配算法基于特征的立体匹配算法通过提取左右视图中的特征点(如角点、边缘等),然后根据特征点的相似性进行匹配。
该方法具有较高的鲁棒性,对光照、噪声等有一定的抵抗能力。
常见的特征提取方法包括SIFT、SURF等。
3.4 算法优缺点及改进方法每种立体匹配算法都有其优缺点。
例如,基于区域的算法精度高但计算量大;基于特征的算法鲁棒性高但可能丢失部分细节信息。
针对这些问题,研究者们提出了多种改进方法,如结合多种算法的优点进行融合匹配、优化特征提取和匹配策略等。
此外,随着深度学习和人工智能的发展,基于深度学习的立体匹配算法也逐渐成为研究热点,其在复杂场景下的匹配效果有了显著提升。
基于改进SIFT立体匹配算法的双目三维重建研究
第5期(总第222期)2020年10月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.5Oct.文章编号:1672 6413(2020)05 0004 03基于改进SIFT櫜立体匹配算法的双目三维重建研究童 欣,殷晨波,杜雪雪,马 伟(南京工业大学机械与动力工程学院,江苏 南京 211800)摘要:针对双目三维重建视觉匹配中图像视差计算和图像像素匹配效率低这一问题,提出一种改进SIFT立体匹配算法。
采用自适应模糊替换经典SIFT算法中的高斯模糊以解决高斯函数计算资源需求过大、时间过长的问题。
对比不同算法处理的图片,经改进的算法匹配率在91%左右,符合要求并随着图片分辨率的提高运行时间减少。
关键词:双目视觉;自适应模糊;SIFT改进算法;三维重建;立体匹配中图分类号:TP242.6+2∶TB115 文献标识码:櫜A江苏省研究生科研与实践创新项目(KYCX20_0999)收稿日期:2020 06 17;修订日期:2020 08 23作者简介:童欣(1997),女,江苏扬州人,在读硕士研究生,研究方向:机器视觉。
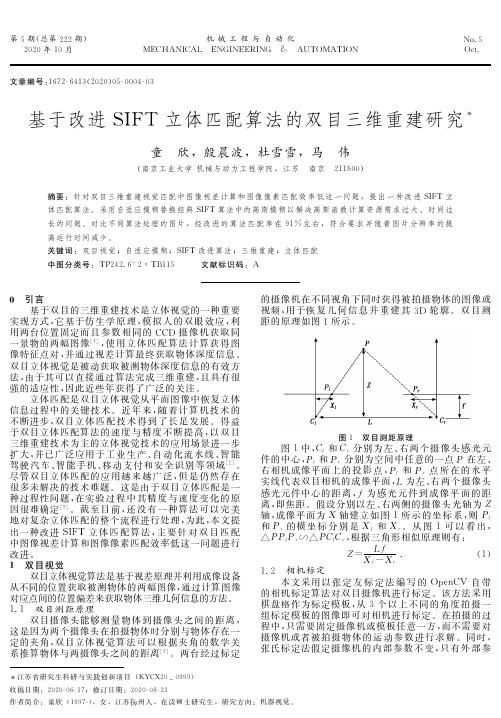
0 引言基于双目的三维重建技术是立体视觉的一种重要实现方式,它基于仿生学原理,模拟人的双眼效应,利用两台位置固定而且参数相同的CCD摄像机获取同一景物的两幅图像[1],使用立体匹配算法计算获得图像特征点对,并通过视差计算最终获取物体深度信息。
双目立体视觉是被动获取被测物体深度信息的有效方法,由于其可以直接通过算法完成三维重建,且具有很强的适应性,因此近些年获得了广泛的关注。
立体匹配是双目立体视觉从平面图像中恢复立体信息过程中的关键技术。
近年来,随着计算机技术的不断进步,双目立体匹配技术得到了长足发展。
得益于双目立体匹配算法的速度与精度不断提高,以双目三维重建技术为主的立体视觉技术的应用场景进一步扩大,并已广泛应用于工业生产、自动化流水线、智能驾驶汽车、智能手机、移动支付和安全识别等领域[2]。
《基于双目视觉的立体匹配算法研究及应用》范文
《基于双目视觉的立体匹配算法研究及应用》篇一一、引言随着计算机视觉技术的飞速发展,双目视觉立体匹配算法在三维重建、机器人导航、自动驾驶等领域得到了广泛应用。
本文旨在研究基于双目视觉的立体匹配算法,探讨其原理、方法及实际应用,以期为相关领域的研究提供参考。
二、双目视觉立体匹配算法原理双目视觉立体匹配算法是通过模拟人类双眼视觉原理,利用两个相机从不同角度获取场景的图像信息,通过计算两幅图像间的视差,从而恢复出场景的三维信息。
立体匹配是双目视觉的核心问题,其基本原理包括特征提取、特征匹配、视差计算等步骤。
1. 特征提取:在两幅图像中提取出具有代表性的特征点,如角点、边缘点等。
这些特征点将用于后续的匹配过程。
2. 特征匹配:利用一定的匹配算法,如基于区域的匹配、基于特征的匹配等,在两幅图像中寻找对应的特征点。
3. 视差计算:根据匹配得到的特征点,计算视差图。
视差图反映了场景中各点在两幅图像中的相对位移,从而可以恢复出场景的三维信息。
三、立体匹配算法研究针对双目视觉立体匹配算法,本文重点研究了以下几种方法:1. 基于区域的匹配算法:该类算法通过计算两幅图像中对应区域的相似性来寻找匹配点。
常见的区域匹配算法包括块匹配、窗口匹配等。
2. 基于特征的匹配算法:该类算法通过提取图像中的特征点,如角点、边缘点等,进行特征匹配。
常见的特征匹配算法包括SIFT、SURF等。
3. 视差计算优化方法:为了提高视差计算的精度和效率,研究者们提出了多种优化方法,如引入先验知识、利用多尺度信息、采用半全局匹配算法等。
四、立体匹配算法应用双目视觉立体匹配算法在多个领域得到了广泛应用,如三维重建、机器人导航、自动驾驶等。
本文将重点介绍其在以下两个领域的应用:1. 三维重建:通过双目视觉立体匹配算法,可以恢复出场景的三维信息,从而实现三维重建。
三维重建技术在游戏开发、虚拟现实、医疗影像处理等领域具有广泛应用。
2. 自动驾驶:双目视觉立体匹配算法可以用于自动驾驶系统的环境感知。
基于深度学习的双目立体视觉关键技术研究
基于深度学习的双目立体视觉关键技术研究随着深度学习技术不断地深入发展,其在计算机视觉领域的应用得到了越来越广泛的探索和应用,其中双目立体视觉技术便是其中的一个重要方向。
那么,基于深度学习的双目立体视觉关键技术究竟是什么?它有什么作用和应用场景呢?本文将对这些问题进行一定的探讨和分析。
一、什么是双目立体视觉技术?双目立体视觉技术是一种通过两个摄像机分别拍摄同一场景的图像,然后通过计算机视觉技术将这两张图像进行配对,最终得到一个三维的深度图像,以模拟人类双眼观察物体的效果。
相对于单目视觉技术,双目立体视觉技术能够提供更加丰富的信息,包括物体的距离、深度、大小等,这在机器人导航、三维重建、虚拟现实、安防监控等领域都有着广泛的应用。
二、基于深度学习的双目立体视觉关键技术传统的双目立体视觉技术主要是通过构建匹配代价函数,利用像素级别的匹配方法获取两幅图像之间的对应关系,并进而计算出深度信息。
然而,由于环境、光照、物体材质等因素的影响,传统的双目立体视觉技术往往难以获得准确的深度信息。
基于深度学习的双目立体视觉技术则可以通过神经网络的学习和训练,将图像中的区域特征提取出来,进而实现更加精准和准确的深度信息获取。
具体来说,基于深度学习的双目立体视觉关键技术主要包括以下方面:1、基于神经网络的立体匹配算法传统的立体匹配算法主要是通过计算左右两个视角内不同像素之间的匹配代价,并选择匹配代价最小的一组像素作为匹配结果。
而基于深度学习的立体匹配算法则是通过训练一个深度卷积神经网络(CNN)来提取出深度信息的特征,再通过卷积核匹配图像,从而获取更加精准和准确的深度信息。
2、深度学习的特征提取和表示学习利用深度学习模型可以对图像进行特征提取和表示学习,将图像中的区域特征提取出来,包括边缘、角点、纹理等。
这些特征能够进一步用于深度估计和视差计算等任务中,以提升深度信息的准确度和精度。
3、基于深度学习的图像生成和增强技术基于深度学习的图像生成和增强技术可以通过生成对抗网络(GAN)和卷积神经网络将图像进行合成和增强。
3D视觉中的立体匹配算法研究与改进
3D视觉中的立体匹配算法研究与改进在3D视觉领域中,立体匹配算法是一项重要的技术,用于处理立体图像的深度信息。
立体匹配算法旨在通过对图像中的对应点进行匹配,确定它们之间的距离,从而重构场景的三维结构。
本文将对3D视觉中的立体匹配算法进行研究与改进。
一、立体匹配算法的基本原理立体匹配算法的基本原理是通过比较左右两幅立体图像的像素信息,找到它们之间的对应点,并计算出距离或深度信息。
常用的立体匹配算法包括视差法、基于特征的立体匹配、图割算法等。
视差法是最传统的立体匹配算法之一。
它通过比较左右图像中像素的灰度值差异来确定对应点的视差值,再通过一定的几何关系计算出深度信息。
视差法简单易实现,但对于纹理丰富、边缘模糊等情况下的图像匹配效果不佳。
基于特征的立体匹配算法利用图像中的特征点(如角点、边缘等)进行匹配,以获得更准确的结果。
该算法通常包括特征提取、特征匹配和深度计算等步骤。
特征点的选择和匹配精度对立体匹配结果的准确性有着重要影响。
图割算法是一种基于图论的立体匹配算法,它将立体匹配问题转化为图割问题。
通过构建能量函数,利用图割算法来计算最小代价的匹配结果。
图割算法具有较高的准确性和鲁棒性,但计算复杂度较高,不适用于实时系统。
二、立体匹配算法的常见问题在实际应用中,立体匹配算法仍然存在一些问题,限制了其性能和应用范围。
主要问题包括视差失真、运动物体处理、低纹理区域匹配等。
视差失真是指由于视角变化或透视变换等原因导致匹配误差增大。
特别是在远处或大角度情况下,视差估计会出现积累误差,使得深度信息不准确。
解决视差失真问题的方法包括视角校正、立体图像重建等。
运动物体处理是指当场景中存在运动物体时,立体匹配算法难以准确地匹配对应点。
运动物体造成图像中的对应点轻微偏移,导致匹配错误。
针对这个问题,可以采用背景建模、光流估计等方法来提高立体匹配的稳定性。
低纹理区域匹配是立体匹配中的一个挑战性问题。
在低纹理区域,图像中的对应点很少或没有,难以准确匹配。
《双目立体视觉三维重建的立体匹配算法研究》
《双目立体视觉三维重建的立体匹配算法研究》篇一一、引言双目立体视觉技术是计算机视觉领域中的一项重要技术,它通过模拟人类双眼的视觉系统,利用两个相机从不同角度获取同一场景的图像信息,再通过一系列的图像处理技术,实现三维重建。
其中,立体匹配算法是双目立体视觉三维重建的关键技术之一。
本文将重点研究双目立体视觉三维重建中的立体匹配算法,并分析其原理、方法和存在的问题及解决方法。
二、立体匹配算法的基本原理和常用方法1. 立体匹配算法的基本原理立体匹配算法是利用双目相机获取的左右两幅图像中的视差信息,通过匹配算法找出同一场景在不同视角下的对应点,进而实现三维重建。
其基本原理包括四个步骤:图像预处理、特征提取、立体匹配和三维重建。
2. 常用立体匹配算法(1)基于区域的立体匹配算法:该算法通过计算左右图像中每个像素点周围的区域相似度来确定视差值。
其优点是精度高,但计算量大,实时性较差。
(2)基于特征的立体匹配算法:该算法先提取左右图像中的特征点,再通过特征匹配来计算视差值。
其优点是计算量小,实时性好,但需要较好的特征提取算法。
(3)基于相位的立体匹配算法:该算法利用相位信息来计算视差值,具有较高的精度和稳定性。
但其对噪声敏感,且计算量较大。
三、存在的问题及解决方法1. 匹配精度问题:由于光照、遮挡、透视畸变等因素的影响,立体匹配算法的精度会受到影响。
为了提高匹配精度,可以采用多尺度、多特征融合的方法,提高特征提取的准确性和鲁棒性。
2. 实时性问题:在实际应用中,要求立体匹配算法具有较高的实时性。
为了解决这一问题,可以采用优化算法、硬件加速等方法来降低计算量,提高运算速度。
3. 视差图问题:视差图是立体匹配算法的重要输出结果之一。
视差图的质量直接影响着三维重建的精度和效果。
为了提高视差图的质量,可以采用多约束条件下的优化算法、后处理等方法来优化视差图。
四、研究进展与展望近年来,随着计算机视觉技术的不断发展,双目立体视觉三维重建技术也取得了较大的进展。
《基于双目立体视觉的测距算法研究》范文
《基于双目立体视觉的测距算法研究》篇一一、引言在现今的自动驾驶、机器人技术、以及3D计算机视觉领域,双目立体视觉测距算法以其准确度高、鲁棒性强的特点得到了广泛的应用。
本文旨在研究基于双目立体视觉的测距算法,深入探讨其原理、应用及其优缺点,并通过实验分析验证其有效性。
二、双目立体视觉原理双目立体视觉是通过模拟人类双眼的视觉过程,利用两个相机从不同角度获取同一场景的图像,再通过图像处理技术恢复出场景的三维信息。
其基本原理包括图像获取、图像校正、特征提取、立体匹配和三维重建等步骤。
三、测距算法研究基于双目立体视觉的测距算法主要分为以下几个步骤:1. 图像获取与预处理:首先,通过两个相机获取同一场景的左右图像,然后进行预处理,包括去噪、灰度化等操作,以便后续处理。
2. 特征提取与匹配:在预处理后的图像中提取特征点,如SIFT、SURF等算法。
然后,通过立体匹配算法找到对应点,如基于区域的匹配算法、基于特征的匹配算法等。
3. 计算视差:通过立体匹配得到的对应点计算视差,即同一物体在不同相机图像中的位置差异。
视差反映了物体在空间中的深度信息。
4. 深度信息恢复与测距:根据视差和双目相机的基线距离计算深度信息,从而得到物体的三维坐标。
再结合相关算法计算得到物体与相机的距离。
四、算法优化与改进为了提高测距精度和鲁棒性,可以采取以下措施对算法进行优化和改进:1. 优化特征提取与匹配算法:采用更先进的特征提取与匹配算法,如深度学习算法等,提高匹配精度和速度。
2. 引入约束条件:利用先验知识或已知信息引入约束条件,如顺序一致性约束、极线约束等,以减少错误匹配的概率。
3. 深度学习算法的融合:将深度学习算法与双目立体视觉测距算法相结合,通过大量数据训练得到更准确的模型。
4. 多重校正技术:在图像获取阶段引入多重校正技术,以消除相机之间的几何畸变和光畸变等影响测距精度的因素。
五、实验分析本文通过实验验证了基于双目立体视觉的测距算法的有效性。
《2024年基于双目立体视觉定位和识别技术的研究》范文
《基于双目立体视觉定位和识别技术的研究》篇一一、引言随着科技的飞速发展,计算机视觉技术在众多领域中得到了广泛的应用。
其中,双目立体视觉定位和识别技术以其高精度、高效率的特点,在机器人导航、三维重建、无人驾驶等领域中发挥着重要作用。
本文旨在研究基于双目立体视觉的定位和识别技术,探讨其原理、方法及应用领域,以期为相关领域的研究提供参考。
二、双目立体视觉技术原理双目立体视觉技术是通过模拟人眼视觉系统,利用两个相机从不同角度获取同一场景的图像信息,再通过图像处理技术提取出场景的三维信息。
其主要原理包括摄像机标定、图像预处理、特征提取与匹配、三维信息重建等步骤。
1. 摄像机标定摄像机标定是双目立体视觉技术中的重要环节,它旨在确定摄像机的内部参数和外部参数。
内部参数包括摄像机焦距、主点坐标等,外部参数则描述了摄像机与世界坐标系之间的关系。
通过标定,可以获取到摄像机在三维空间中的位置和方向。
2. 图像预处理图像预处理包括灰度化、去噪、二值化等操作,旨在提高图像的质量,以便后续的特征提取与匹配。
其中,灰度化可以将彩色图像转换为灰度图像,降低计算复杂度;去噪可以消除图像中的噪声干扰;二值化则将图像转换为二值图像,便于特征提取。
3. 特征提取与匹配特征提取与匹配是双目立体视觉技术的核心步骤。
通过提取图像中的特征点、线、面等信息,建立场景的三维模型。
特征匹配则是根据提取的特征信息,在两个相机获取的图像之间寻找对应关系,为三维信息重建提供依据。
三、双目立体视觉定位技术双目立体视觉定位技术是利用双目立体视觉系统获取场景的三维信息,实现目标的定位。
其主要方法包括基于特征点的定位方法和基于区域匹配的定位方法。
1. 基于特征点的定位方法该方法首先在两个相机获取的图像中提取特征点,然后通过特征匹配找到对应关系,最后利用三角测量原理计算目标的三维坐标。
该方法具有较高的精度和稳定性,适用于各种复杂环境。
2. 基于区域匹配的定位方法该方法通过在两个相机获取的图像中寻找相同的区域,然后利用区域内的像素信息进行匹配,实现目标的定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的点即确定了扫描线上特征点的最佳匹配关系。
在具体的匹配过程中,可以引入根据顺序一致性约束条
件,该条件限制了相关系数平面中匹配路径的走向只能在0。 ~90。的范围内,将上式进一步简化为:
V(z,s)一maxEV(x一1,5),V(z一1,s一1),
y(z,s一1),V(z,s一1)l+C(x,5)
(8)
计算机测量与控制·2。譬’16(9)1332
. · .·
文章编号:1671—4598 C2008109—1332—03
Computer Measurement & ControII
中圈分类号:TP301.6
文献标识码:B
r磊i手FI三丽 I瞒,.1似,·o I
基于双目视觉的深度图立体匹配算法研究改进
在区域相关匹配的基础上,这里引入动态规划技术来选择 最优的匹配点。由于用来匹配的图像对事先已经进行外极线校 正,所有外极线等同于水平扫描线,所以匹配点只在对应的扫 描线上寻找,依次对每条水平扫描线上的像点进行匹配。对于 某一条扫描线(如第Y条),取右图扫描线为视差空间图的垂 直坐标轴,取左图扫描线为水平坐标轴,图中位于坐标(z, s)的值等于右图像位于(z,y)的特征点与左图像(s,y) 处的特征点的支持窗口之间的区域相关值,描述右图特征点 (z,y)与左图特征点(s,y)相匹配的程度。在选定视差搜 索范围。一d后,根据前面区域相关匹配的结果,若匹配时采 用的两幅图像宽度均为N,则每一条扫描线上所有特征点的 相关值构成一个N×N矩阵,所以视差空间图像平面也叫相 关系数矩阵平面。由于有视差搜索空间限制,该矩阵中也仅有 有限个元素值不为零。
(b)7 x7窗口 图4互相荧算法
(c)9 x9窗口
4.2引入改进动态规划的匹配算法实验 本实验所用的匹配源图像是立体匹配标准测试图像对,标
准测试图像选用University of Tsukuba提供的Tsukuba图像对 和R.Szeliski and R.Zabih提供的Map图像,实验结果如图 5所示。
立体匹配的过程大体可分为3步;确定匹配基元,定义测 度函数,选择搜索策略。根据匹配基元的不同,立体匹配算法 分为3类:区域匹配、特征匹配和相位匹配。
2 区域相关立体匹配算法 2.1基本区域相关匹配算法
区域相关匹配算法[11是一种经典的立体匹配算法,它可以 得到稠密的视差图。因为单个像紊的灰度不能够提供足够的信 息,所以该算法先以基准图中一个像素点为中心创建一个邻域 支持窗口,用邻域像素的灰度值分布来表征该像素,然后从待 匹配图中寻找这么一个像素,以其为中心创建同样的一个窗 口,使其邻域像素的灰度值分布与前者的相似性必须满足一定 的阈值条件。对于己经进行外极线校正的立体图像对,可以认 为匹配的对应点在图像的同一行上,如图1所示。
对于左图像中点Il(z,y),可以从右图中同一水平扫描 线上搜索其匹配点。这之前,我们首先要定义描述两个窗口灰 度分布差异的灰度相关测度函数,当两个窗口包含的灰度信息
收稿日期:2008—05—08;修回日期:2008—06—10。 作者简介:周亦鸱(1969一),男,博士,主要从事计算机图像视觉处 理、图像算法、交通运输规划及安全方向的研究.
周亦鹏
(西北工业大学自动化学院,陕西西安710068)
摘要:双目立体视觉可以直接模仿人眼与人类视觉的立体感知过程,是计算机视觉研究的核心课题之一。文章主要针对图像的立体 匹配算法研究,对区域相关算法进行了分析。在传统的NCC基本灰度相关度测度函数的基础上,将动态规划优化理论引入到匹配中,提 高了匹配的速度和准确度。实验表明.本文算法能够满足目标跟踪试验要求,具有重要的理论意义和较高的实用价值。
Y,d),把
了丽一丽矗面而。圣娶-(x-k i,y+川6)
Iz(z+d,y)一
—(2—j二_若生丽∑ J。(z+fd,y+歹)代m(2n +1)
+1)f幺,笪“~”一……“。
人COT,'(z,y,d)整理简化后的结果为:
cov(x,y,d)一∑∑[J,(z+f,,+J)·J2(z+i+d,y+』ห้องสมุดไป่ตู้一
mr(z,Y,I,)i=…∑一∑“[J,(z+f,,+j)一i百丽]2(4) mr(x--[-d,Y,Iz…);一一∑≈∑[J。(z+i+d,y+j)一瓦iiF丽]2
(5)
从上式可以看出,该函数的计算量相当大,但是在窗口移
动过程中存在很多重复计算,所以对上式我们可以进行一定的
简化。通过以下途径可以提高相关计算速度。计算co”(z,
(2m+i1=-)m(i2一n+1)11石Iy)·五(至—千砑]
3基于动态规划的全局最优搜索策略
3.1动态规划简介 动态规划[43是解决多阶段决策最优化问题的方法。利用最
优化原理求解多阶段决策最优化的过程,称为动态规划。适用 于动态规划方法的问题必须满足最优化原理和无后效性。动态 规划的基本思想是:将过程分成若干个互相联系的阶段,即子 问题。将各阶段按照一定的次序排列好之后,对于某个给定的 阶段状态,先求解子问题;对于重复出现的子问题,只在第一 次遇到时进行求解并把答案保存,以后遇到时直接引用答案。 3.2引入动态规划的区域相关匹配优化
圈1区域相关匹配原理
相同或相近时,测度函数值达到最小。常见的归一化互相关算 法NCC灰度相关测度函数如下:
(1)归一化互相关算法Ned胡(NormalizedCross Corre—
lation):
∑∑Ⅱo+id+J)一五石jI]·[b+i+d∥+力一i石干砑
,’\一J/—_∑I ∑Ellb-4-i,y-4-j)一…^—砑1∑∑[k+i+dd州)一i五耳劢
(a)原Tsakuba图像
Co)LOG卷积后的图像
(c)预处理后的图像
图3匹配源图像预处理
然后对预处理后的图像对进行基本区域相关匹配的实验。 应用归一化互相关灰度测度函数实验,每组实验中又选择大小 不同的窗口进行多次实验。
本实验选择的窗口为5×5,7×7和9×9大小的方形窗 口,视差搜索范围d一30,实验结果如图4所示。实验表明, 对于这种测度函数,窗口大小的选择对匹配结果的影响还是相 当大的:很明显,匹配窗口较小时,出现很多不连续点,误匹 配较多,而窗口较大时,图像边缘特征变得很模糊。所以匹配
范围限定等策略,利用从相关参数矩阵中寻找最优路径,实现 了立体匹配。可以看出,本方法在视差连续的地方效果较好, 本文研究的改进动态规划匹配算法完全可以描绘场景的深度信 息,同时也较好地满足了从视差图中把要跟踪的目标从场景中 分离的要求。
关键词:双目视觉t立体匹配算法I相关匹配优化;视差范围
Improve Algorithm Based on the Depth Map Binocular Stereo Matching
Zhou Yipeng (Department of Automation,Northwestern Polytechnical University,Xi'an 710068,China) Abstract:Binocular stereo vision can directly imitate the human eye and human visual perce·ption of three--dimensional,computer vision is the core topic of study.This paper mainly for a three-dimensional image matching algorithm research,the regional correlation algorithm was analyzed.In the traditional NCC basic gray correlation function of the measure on the basis of dynamic programming optimization theory will be introduced to the match,improved matching speed and accuracy.Experiments show that the algorithm can meet the test requirements of target tracking and it is an important theoretical and practical value. Key wolds:binocular visiont stereo matching algorithm}matching optimization;parallax scope
由此可见,参与比较的路径减少,再加上视差范围的限
定,使计算的复杂度大大减小,能够快速找到匹配的最佳路 径,从而实现致密视差图的恢复。
4实验及分析
4.1 区域标准相关匹配算法窗口大小选择对结果的影响 本实验使用的匹配源图像对是由University of Tsukuba提
供的Tsukuba图像对,图像大小为38,1*288像素。实验前先 对图像进行预处理,用口=1.0的7×7LOG离散内核进行卷 积[6]。结果如图3所示,图中只列出了图像对中的左图的处理 结果。预处理后的图像与原图像相比较,很容易看出边缘特征 变得更加明显了。
V(z一3,s一1),…,]+C(工,s)
(7)
其中,max为求最大值符号,V(z,s)为阶段路径达到z位
置的累积价值,C(z,s)为右图第z个特征点与左图第s个
特征点的相关值。搜索时从相关系数矩阵平面的左上角V(1,
1)出发,在选定的搜索视差范围d内寻找到达右下角V(N, N)点的最佳路径,沿该路径累积的匹配价值最大,该路径上
Q)
以上是区域相关立体匹配中的归一化互相关基本算法,这 种方法中窗口的选择很重要,具体的影响将在实验中分析。 2.2区域相关匹配算法的一些改进 2.2.1视差范围约束
这起源于心理物理实验,它表明人类视觉系统只能融合比 某个限度小的立体图像[3]。将该结果应用于立体视觉的研究 中,可以大大减少立体匹配寻找匹配点时的搜索长度,大大减 少计算时间。对于双目立体图像对‘“,如图1所示,可以预先 设定视差范围(一d,+d),对于左图像中点L(z,y),可 以在右图中同一水平扫描线上设定视差范围内搜索其匹配点, 即从L(z—d,y)到Jz(z+d,j,),这样就避免了搜索整个 扫描线,提高了效率。这种约束对于不同测度函数的区域匹配 都是适用的。 2.2.2归一化互相关函数的加速计算方法