哈工大-测试技术与仪器-大作业一
哈工大测试大作业——传感器综合运用——题目四全解

传感器综合运用一、设计题目如图所示工件,在生产线的30°滑道上自上而下滑落,要求在滑动过程中检测工件厚度,并且计数。
图中4mm尺寸公差带为10μm。
图1.测量工件二、厚度检测传感器的选择电容传感器是把被测的机械量,如位移、压力等转换为电容量变化的传感器。
它的敏感部分就是具有可变参数的电容器。
其最常用的形式是由两个平行电极组成、极间以空气为介质的电容器(见图)。
若忽略边缘效应,平板电容器的电容为εA/δ,式中ε为极间介质的介电常数,A为两电极互相覆盖的有效面积,δ为两电极之间的距离。
δ、A、ε三个参数中任一个的变化都将引起电容量变化,并可用于测量。
因此电容式传感器可分为极距变化型、面积变化型、介质变化型三类。
极距变化型一般用来测量微小的线位移或由于力、压力、振动等引起的极距变化。
面积变化型一般用于测量角位移或较大的线位移。
介质变化型常用于物位测量和各种介质的温度、密度、湿度的测定。
与电阻式或电感式传感器相比,电容传感器具有四大优点:(l)分辨力高,常用于精密测量;(2)动态响应速度快,可以直接用于某些生产线上的动态测量;(3)从信号源取得的能量少,有利于发挥其测量精度;(4)机械结构简单,易于实现非接触式测量。
因此电容传感器在精密测量中占有重要的地位。
此外,电容器传感器还具有结构简单,价格便宜,灵敏度高,零磁滞,真空兼容,过载能力强,动态响应特性好和对高温、辐射、强振等恶劣条件的适应性强等优点。
因此,在本题中选择电容传感器作为厚度检测传感器。
三、电容传感器的检测原理电容式传感器可分为面积变化型、极距变化型、介质变化型三类,下面将分述其检测原理。
1、面积变化型电容传感器这一类传感器输出特性是线性的,灵敏度是常数。
这一类传感器多用于检测直线位移、角位移、尺寸等参量。
测量装置如图2所示。
图2.变面积式电容传感器其电容量计算公式为:002121212()22ln()ln()ln()x l l l l l C C C C r r r r r r lπεπεπε-∆∆∆∆=-=-=-=- 式中 L -外圆筒与内圆柱覆盖部分的长度21,r r -外圆筒内半径与内圆柱外半径 灵敏度0212ln()C C l r r l πε∆=-=-∆2、极距变化型电容传感器极距变化型电容传感器一般用来测量微小的线位移或由于力、压力、振动等引起的极距变化。
哈工大_测试技术与仪器_大作业_传感器的综合应用

哈尔滨工业大学测试技术与仪器大作业二——传感器的综合应用姓名:学号:10908104xx班级:0908104学院:机电学院专业:机械设计制造及其自动化日期:2011.6.23录*设计指导书 (3)一、厚度检测 (3)1、光强位移传感器测量厚度原理 (3)2、方案分析 (3)3、元器件选择 (3)二、计数器 (5)1、计数器 (5)2、设计方案 (5)3、系统组成 (5)参考文献 (8)*设计指导书:题目:如图所示的工件,根据图中所示测量要求(1)选用适合的传感器(需要分析其工作原理),并提供实际产品型号(最好有产品照片)、选型参数;(2)设计相应的测量方案,要求为计算机控制的测试系统;(3)绘制方案示意图;(4)绘制测量装置系统框图。
(5)如图所示工件,在生产线的30°滑道上自上而下滑落,要求在滑动过程中检测工件厚度,并且计数。
图中4mm尺寸公差带为10μm。
一、厚度检测1、光强位移传感器测量厚度原理:通过传感器接收受到光强随传感器探头到反光面距离的改变而变化,经光电变换器件转变为直流电压或电流信号后由电路输出。
该仪器受到,α,ε,η,Ζ),σ为反的电压为U=f(σ,Ι光表面的反射率;Ι为电源发光强度;α为光电转换效率;ε为电路增益;η为光路效率;Ζ为,反射面到传感器探头端口的距离。
假设当σ,Ια,ε,η,Ζ一定时,电压就是Z的函数。
2、方案分析该方案实现测量结果的前提依赖于其传感器在线性度、重复性、滞缓、灵敏度、分辨力、静态误差、稳定性、漂移等。
3、元器件选择①芯片avrmega16l选择avr作为MCU处理的芯片具有比89c51有如下几个优点,工作电压范围为2.7~6.0V,电源抗干扰性能强;片内集成16位指令的程序存储器,总线采用哈佛结构,程序存储器和数据存储器分开组织和寻址;采用CMOS工艺技术,精简指令RISC结构,用32个通用工作寄存器代替了累加器,具有较高的MIPS/MHZ 的能力,具有高速度,低功耗,休眠功能,指令执行速度可达50ns;自带8路复用的单端输入通道的AD转换,具有10位精度,65~260微妙的转换时间,7路差分输入通道,具有可选的2.56VADC的参考电压,连续转换或单次转换模式,ADC转换结束中断。
哈工大机电液系统测试技术大作业 电液伺服阀性能测试解析
H a r b i n I n s t i t u t e o f T e c h n o l o g y机电液系统实验测试技术大作业(二)设计方案:电液伺服阀性能测试系统学院:机电工程学院专业:机械设计制造及其自动化班级:学号:姓名:指导老师:时间:哈尔滨工业大学目录前言 (2)系统组成及功能 (2)电液伺服阀测试系统原理 (2)电液伺服阀特性测试 (3)静态测试 (3)动态测试 (9)传感器选型 (10)体会与心得 (10)参考文献 (11)1.前言电液控制伺服阀简称伺服阀,相对于普通液压系统中的常规阀来说,伺服阀是一种高级的、精密的液压元件。
伺服阀既是信号转换元件,又是功率放大元件。
在电液伺服控制系统中,伺服阀将系统的电气部分与液压部分连接起来,实现电液信号的转换与放大,对液压执行元件进行控制,具有控制精度高、响应速度快、信号处理灵活、输出功率大和结构紧凑等优点。
为了更好地利用电液伺服阀,必须对它进行充分的实验。
2.系统组成及功能电液伺服阀测试系统主要由泵站系统、测试台、计算机测控系统等组成。
小泵额定压力为21 MPa,流量10 L/min;大泵额定压力为7 MPa,流量90 L/min。
测试台设计成两个工位,即电液伺服阀静态测试工位和动态测试工位。
测控系统主要包括:电源开关电路、信号调理器、Avant测试分析仪、控制软件(液压CAT控制测试软件)和计算机系统。
测控系统实施对液压能源、液压测试台的控制,实现对电液伺服阀某项或多项液压参数测试的油路转换,同时采集各项所需的液压参数,经软件处理获得符合电液伺服阀试验规范要求的曲线、数据、报表等。
实现了对电液伺服阀的动、静态特性的实时显示及描绘,并自动进行相关数据分析和处理。
3.电液伺服阀测试系统原理电液伺服阀测试系统原理图如图1所示。
4.电液伺服阀特性测试4.1静态测试测试系统示意图如图2:图2 静态实验装置典型回路(1)空载流量特性测试用下列实验步骤测出输入电流与负载压降的变化关系,从而绘制空载流量特性曲线。
哈工大-测试技术大作业一-三角波

哈工大-测试技术大作业一-三角波本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.March一、设计题目二、求解信号的幅频谱和相频谱三角波的信号数学表达式为:⎪⎪⎩⎪⎪⎨⎧<<-<<-=4/34/,4244/,4)(000000T t T t T A A T t T t T At x其傅里叶级数展开式为)5sin 2513sin 91(sin 8)(0002⋯++-=t t t At x ωωωπ 由此可以写出其信号的幅频谱图和相频谱图: 1.单边谱 幅频谱函数⋯==,5,3,1,822n n AA n π 相频谱函数⎪⎪⎩⎪⎪⎨⎧⋯=-⋯==,11,7,3,2,9,5,1,2n n n ππϕ 幅频谱、相频谱图如下所示:2.双边谱信号的傅里叶级数的复指数展开为:])(31[4)(00002322222⋯++-+=----t j j tj j tj jtj je e e e ee eeA t x ωπωπωπωππ则2222142121nA A b a C n n n n ⋅==+=π nnn a b arctan-=ϕ 可以画出幅频谱及相频谱如下图所示:三、画出系统H(s)的Bode 图 1.一阶系统使用MATLAB 程序,输入:num=[1]; den=[0.01,1]; bode(num,den);得一阶系统的Bode 图如下:2.二阶系统取n ω=150rad/s ,ζ=0.5,在MATLAB程序,输入:num=[6000]; den=[1,150,22500];bode(num,den);得二阶系统的Bode 图如下:四、分析输出信号 1.一阶系统对于该输入信号可以根据其傅里叶级数对每一项单独的计算系统输出响应,然后相加即可。
)5sin 2513sin 91(sin 8)(0002⋯++-=t t t At x ωωωπ 取t A t x 021sin 8)(ωπ=,将其输入至一阶系统101.01)(+=s s H ,可得:)]01.0arctan(sin[)01.0(18)()(002221ωωωπ-+==t At x t y o]5729.0sin[5654.810︒-=t 同理将t A t x 0233sin 98)(ωπ-=、t At x 0255sin 258)(ωπ=…代入,将各项响应相加即可求解输出该信号对一阶系统的响应。
测试技术与仪器 01
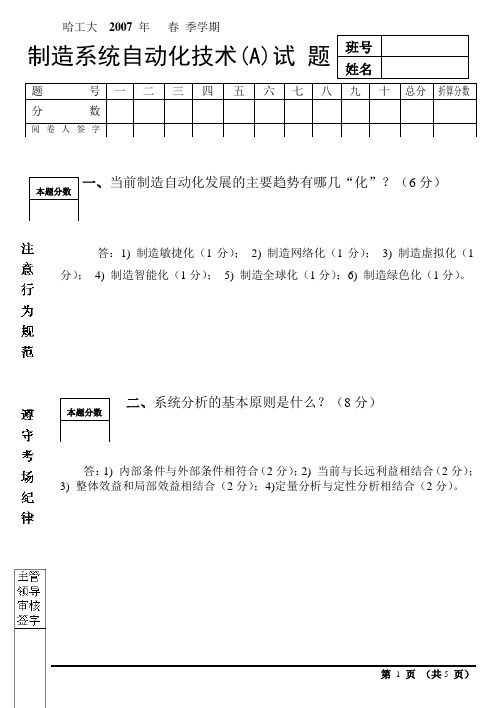
哈工大 2007 年 春 季学期制造系统自动化技术(A)试 题一、当前制造自动化发展的主要趋势有哪几“化”?(6分)答:1) 制造敏捷化(1分); 2) 制造网络化(1分); 3) 制造虚拟化(1分); 4) 制造智能化(1分); 5) 制造全球化(1分);6) 制造绿色化(1分)。
二、系统分析的基本原则是什么?(8分)答:1) 内部条件与外部条件相符合(2分);2) 当前与长远利益相结合(2分);3) 整体效益和局部效益相结合(2分);4)定量分析与定性分析相结合(2分)。
三、控制系统一般由哪几部分组成?各部分功用如何?(8分)答:控制系统一般由控制器、执行机构、被控对象及检测与转换装置构成。
(4分)检测与转换装置用于将检测被控量,并将检测到的信号转换为标准信号输出。
(1分)控制装置用于将检测装置输出信号与设定值进行比较,按一定的控制规律对其偏差信号进行运算,运算结果输出到执行机构。
(1分)执行机构是控制系统环路中的最终元件,直接用于控制操作变量变化,驱动被控对象运动,从而使被控量发生变化。
(1分)被控对象是控制系统所要操纵和控制的对象。
(1分)四、如何将一个机械加工车间的若干台数控设备形成DNC系统?该系统主要功用有哪些?(7分)答:一是通过数控设备配置的串口(RS-232协议)接入DNC网络,二是通过数控设备配置的以太网卡(TCP/IP协议)接入DNC网络。
(2分)系统主要功用:(1)程序双向通讯功能(2)信息采集功能(3)与生产管理系统的集成功能(4)数控程序管理功能(5)与PDM系统集成功能。
(5分)五、简述步伐式输送装置的型式、原理、特点和应用场合。
(10分)答:常用的步伐式输送装置有弹簧棘爪式、摆杆式、抬起带走式及托盘式四种。
(2分)(1)弹簧棘爪式输送带:输送杆在支承滚子上往复移动,向前移动时棘爪推动工件或随行夹具前进一个步距;返回时棘爪被后一个工件压下从工件底面滑过,退出工件后在弹簧作用下又抬起。
哈工大机械工程测试基础大作业1信号的分析与系统特性

"测试技术"课程大作业1作业题目:信号的分析与系统特性学生姓名:评阅教师作业成绩2015年春季学期信号的分析与系统特性一、设计题目写出下列信号中的一种信号的数学表达通式,求取其信号的幅频谱图(单边谱和双边谱)和相频谱图,若将此信号输入给特性为传递函数为)(s H 的系统,二、求解信号的幅频谱和相频谱1、写出波形图所示信号的数学表达通式在一个周期中题中三角波可表示为如下所示:4T A ,4400T t T <<-=)(t x042T AA -,44400T t T <<其傅里叶级数展开式为...)5sin 2513sin 91(sin 8)(0002++-=t t t At x ωωωπ 2、求取其信号的幅频谱图和相频谱图 (1)单边谱幅频谱函数为228πn Aa n =,n=1,3,5… 2/π,n=1,5,9…相频谱函数为=n ϕ2/π-,n=3,7,11…则幅频图和相频图如下所示:图1.单边幅频图图2.单边相频图(2)双边谱傅里叶级数的复指数展开为:]31[4)(000032322222⋯++-+=----t j j tj j tj jtj je e e e ee eeAt x ωπωπωπωππ则2222142121nA A b a C n n n n ⋅==+=π nnn a b arctan-=ϕ 则幅频谱、相频谱图如下图所示:图3.双边幅频图图4.双边相频图三、分析其频率成分分布由信号的傅里叶级数形式及其频谱图可以看出,三角波信号的频谱是离散的,其幅频谱只包含常值分量、基波和奇次谐波的频率分量,谐波的幅值以1/n 2的规律收敛,在其相频谱中基波和其各次谐波的相位为2π或-2π。
四、画出H(s)的伯德图1、一阶系统传递函数的伯德图一阶系统的传递函数为1025.01)(+=s s H ,则Bode 图为:图5.一阶系统的伯德图2、二阶系统传递函数的Bode 图二阶系统的传递函数为22900126036000)(++=s s s H ,则Bode 图为:图6.二阶系统的伯德图五、讨论信号的失真情况若将题中所给信号输入传递函数为H (s )的系统中,求其响应,则有:1、一阶响应对于该输入信号可以对每一项单独计算系统输响应,然后相加即可。
哈工大实验方法第一次大作业概要
哈尔滨工业大学试验方法及数字信号处理分析————第一次大作业数字滤波器设计指导老师:包钢学生姓名:陈方鑫学生学号:15S008043第一部分 作业题目一、设计题目1、杂波信号:()sin(210)sin(280)sin(2200)t x t t t πππ=⨯+*+⨯2、要求:(1)绘出杂波信号波形。
(2)分别用FIR IIR 滤波器设计低通和带通滤波器,保留10Hz ,80Hz 频率。
绘出滤波后波形,并与理想波形比较。
(3)在原信号加上白噪声信号,再比较分析。
第二部分 具体设计内容第一节 卷积滤波器的设计一、低通滤波1、低通滤波器参数计算 (1)FIR 滤波频率响应:212()N j fi t i i N H f f e π∆-=-=∑…………①(2)低通期望频率响应:1;0()0;0,f FH f f f F≤≤=≤≥………②(3)通过①、②计算滤波因子 当0i =时,'2f F t ∆= 当0i ≠时,sin(2)'Fi t f iππ=取'f f =可得近似理想低通滤波器:21N k i k ii N y f x -=-=∑(4)由于题目x (t )的最高频率fmax=200。
基于采样定理,f’>2fmax=400。
本例取f’=5fmax=1000。
故 t=0.001s。
2、设计程序程序参数:1t t;F=低通截止频率;t=0:10^-3:0.5;t1=10^-3;F=20;x=sin(2*pi*10*t)+sin(2*pi*80*t)+sin(2*pi*200*t);x1=sin(2*pi*10*t);f(1)=2*F*t1;i=2;while i<60f(i)=sin(2*pi*F*i*t1)/(pi*i);i=i+1;endfor k=61:440y(k)=0;for i=1:60;y(k)=f(i)*(x(k-i)+x(k+i))+y(k);endendy(length(t))=0;plot(t,x,'r',t,x1,'b',t,y,'k');legend('原图','理想图','滤波图');title('F=20');xlabel('x');ylabel('y');3、结果分析F=15放大图放大图放大图分析:上图展示了FIR 低通滤波的总体情况,并分别对F 取15,20,30值时做了对比研究。
哈工大仪器科学与技术学科仪器科学与技术概论题库

10
数字信号处理原理与其在现实生活中 应用研究
12
虚拟仪器技术发展现状
13
压缩感知技术的研究现状 与应用
14
微控制器发展现状分析
数字信号广泛存在于现实生活中,数字信号处理方法已逐 步取代模拟信号处理方法成为当代信号处理的主流技术。 本项目通过查阅资料,明确数字信号处理相对于模拟信号 处理的差别,理解数字信号处理的基本原理,结合大学物 理及高等数学等课程的学习,理解信号频谱、傅立叶分析 等关键概念的具体含义,了解数字信号处理发展现状及典 型应用领域;了解数字信号处理的软硬件实现方法,明确 数字信号处理器的发展现状,掌握常用数字信号处理器型 号及选取原则;最终以语音信号处理为背景,明确数字信 号处理的基本过程。项目进行期间通过教师的指导,循序 本项目的目的在于引导学生探索测试、测量的概念和具体 应用,以此激发专业学习兴趣。可以身边的一个实例开 始,比如每天都用到的手机、MP3等电子设备,是否需要测 试呢?在什么时间、地点、产品阶段进行测试?针对具体 的设备,它的测试是如何进行的呢?需要什么样的设备? 技术手段?用什么标准来判断测试通过呢?如果不通过, 怎么办呢?具体指导过程,可以通过资料搜集、整理分 析,形成最终的项目研究报告。如果可能的话,可以进一 步与相应的企业和科研结构取得联系,学生通过参观走 访,了解产品设计、生产、测试的流程。 了解虚拟仪器在测试测量领域的巨大优势和应用前 景,以及虚拟仪器的研究现状和发展趋势。 1、调研虚拟仪器技术发展状况:目前国际仪器厂商在虚拟 仪器方面的发展情况,发展趋势、发展策略、已经上市的 产品,正在研发的项目; 2、中国国内企业研发的产品与项目、研发单位情况、产品 性能与价格; 3、虚拟仪器在电子、通讯以及生产制造等领域的应用情 况; 4、我校虚拟仪器的研发情况; 5、虚拟仪器和电子、通讯、测试测量等学科间的关系。 调研方式:查阅国内外文献,检索国外各大仪器厂商 网页,调研Agilent, NI 近几十年来,数字信号处理在信号处理领域取得了巨大的 成功。在这个过程中,奈奎斯特(Nyquist)采样定理作为 从模拟信源转换到数字信息的最主要的理论依据,起到了 非常重要的作用。然而,随着各领域对信息需求量的增 加,信号的带宽越来越宽,为了获得信号,采样设备需要 不断地提高采样率,进而产生了数量巨大的采样数据,这 给采样数据的获取、存储、传输、处理与分析带来了巨大 的压力。在这种情况,相关学者提出基于压缩感知技术解 决上述问题,压缩感知的基本概念于2004年提出,2006年 发表正式论文,随后被美国科技评论杂志评为200 微控制器(Microcontroller Unit,即MCU)是将微型计 算机的主要部分集成在一个芯片上的单芯片微型计算机。 经过多年的发展,其成本越来越低,而性能越来越强大, 这使其应用已经无处不在,遍及各个领域。例如电机控制 、条码阅读器/扫描器、消费类电子、游戏设备、电话、 HVAC、楼宇安全与门禁控制、工业控制与自动化和白色家 电(洗衣机、微波炉)等。本题目要求学生通过查阅文献资 料、搜索互联网以及走访相关行业的公司、企业,了解微 控制器的发展历史和现状。对微控制器的应用领域和典型 案例进行分析,特别是对当
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Harbin Institute of Technology
测试技术与仪器大作业一
设计题目:信号的分析与系统特性
院系:英才学院
班级: 1036***
姓名: ******
学号: **********
时间: 2013.07.01
工业大学
一、设计题目
二、求解信号的幅频谱和相频谱
)1-(cosn (-A)e 1e 1(t)e 10
2
t
jn -0
t jn -0
2
t jn -0
02
02
00ππ
ωωωn A
j dt T dt A T dt x T C T T n T T =+
=
=
⎰⎰
⎰
--
当⋅⋅⋅±±±=,5,3,1n 时,π
n A j
C n 2-= 当⋅⋅⋅±±±=6,4,2,0,n 时,0=n C 幅频谱函数为:
π
n A
C n 2=
,⋅⋅⋅±±±=,5,3,1n πn A
C A n n 42==,⋅⋅⋅=,5,3,1n
相频谱函数为:
,...5,3,12
--arctan arctan
==∞==n C C nR nI n ,)(π
ϕ ,...5,-3,-1-2
arctan arctan
==∞+==n C C nR nI n ,)(πϕ 双边幅频图:
单边幅频图:
双边相频图:
单边相频图:
三、频率成分分布情况
方波由离散的频率成分组成。
基频为0
02T π
ω=
,其余频率为基频的奇数倍。
四、系统)(s H 的伯德图
1)一阶系统传递函数1
1
)(+=
s s H τ,0.008s τ=,伯德图为:
-40-30
-20
-10
M a g n i t u d e (d B
)10
10
10
10
10
P h a s e (d e g )
Bode Diagram
Frequency (rad/s)
二阶系统2
2240)(n
n n
s s s H ωζωω++=
,ζ= 0.65,n ω= 100。
伯德图为:
-60-40-20020
40M a g n i t u d e (d B )10
10
10
10
10
P h a s e (d e g )
Bode Diagram
Gm = Inf dB (at Inf rad/s) , P m = 11.9 deg (at 634 rad/s)
Frequency (rad/s)
五、将此信号输入给特性为传递函数为H (s )的系统
1)一阶系统响应
方波信号的傅里叶级数展开为:
∑∞
=⎪⎭⎫
⎝⎛=10sin 4(t)n t n n A x ωπ
,⋅⋅⋅=,5,3,1n
根据线性系统的叠加原理,系统对(t)x 的响应应该是各频率成分响应的叠加,即
[]{}∑∞
=⎪⎭
⎫ ⎝⎛+=10/-000)
(sin -)(sin )(4(t)n t n e n t n n A n A
y ωϕωϕωωπ
τ,⋅⋅⋅=,5,3,1n
其中
2
0011)()
(ωτωn n A ⋅+=
)(00arctan -)(ωτωϕn n ⋅=
故:
[]∑∞
=⎪⎪⎭⎫ ⎝
⎛⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+++=1200/-0020)(1)(arctan -sin 114(t)n t n n e n t n n n A y ωτωτωτωωτπτ)(,⋅⋅⋅=,5,3,1n
各个频率成分幅值失真为:2
0011-1)(-1)
(ωτωn n A ⋅+=
相位失真为:)(00arctan -)(ωτωϕn n ⋅=
因此,若想减小失真,应减小一阶系统的时间常数τ。
2)二阶系统响应
同一阶系统响应,系统对(t)x 的响应应该是各频率成分响应的叠加,即
[]∑∞
=⎪⎪⎭
⎫ ⎝⎛⎭⎬⎫⎩⎨⎧++=13d -000)t (sin -)(sin )(4(t)n t
d n
e n t n n A n A y ϕωωωωϕωωπξω,⋅⋅⋅=,5,3,1n 其中
2
2
20
04]-
[11
)()
(
)(n
n
n n n A ωωξωωω+=
2n
0n
0-12arctan -)()
()(
ωωωωξωϕn n n =
2-1ξωωn d = 2
2
02
32--1-12arctan
-ξωωξξϕ⎪⎪⎭
⎫ ⎝⎛=n n
各个频率成分幅值失真为:2
2
20
04]-[11
-
1)(-1)
(
)(n
n
n n n A ωωξωωω+=
相位失真为:2n
0n
0-12arctan -)()
()(
ωωωωξωϕn n n =
因此,若想减小失真,阻尼比ξ宜选在0.65~0.7之间,频率成分中不可忽视的高频成分的频率应小于(0.6~0.8)n ω,即n ω应取较大值。