几种外骨骼机器人技术详解
穿戴式下肢康复外骨骼机器人工作原理

穿戴式下肢康复外骨骼机器人是一种近年来备受关注的医疗机器人技术,它通过运用先进的科技手段,为行动不便的人提供强有力的助力,帮助他们重新获得行走的能力。
其工作原理可以分为多个方面来探讨:1. 传感器技术:穿戴式下肢康复外骨骼机器人通过精密的传感器技术,能够实时地感知人体的运动信号和力度,从而能够根据用户的动作需求做出相应的反应。
这种技术使得外骨骼机器人能够与用户的动作实时同步,提供更加灵活和个性化的康复训练。
2. 动力学原理:外骨骼机器人内置了多种智能驱动装置和电机,能够根据传感器的反馈信息,提供相应的动力支持。
这种动力学原理使得机器人能够根据用户的需要,调整力度和速度,帮助患者更好地完成康复训练。
3. 控制算法:外骨骼机器人的控制系统采用了先进的算法,能够根据用户的运动需求,实现高度智能化的控制。
这些算法能够通过不断的学习和优化,使得机器人能够更加准确地理解用户的意图,并做出相应的动作支持。
4. 结构设计:外骨骼机器人的结构设计也是其工作原理的重要组成部分。
通过先进的材料和工艺,机器人能够在提供足够支持的保持足够的轻便和便携性,使得患者在进行康复训练时能够更加自如。
总结来说,穿戴式下肢康复外骨骼机器人的工作原理是基于传感器技术、动力学原理、控制算法和结构设计的多方面技术的综合运用。
它通过对患者的运动需求进行感知和分析,提供相应的动作支持,帮助患者进行个性化的康复训练。
个人观点上,我认为穿戴式下肢康复外骨骼机器人的出现,为康复患者提供了全新的解决方案。
它不仅为患者提供了更加个性化和有效的康复训练方式,也为医疗机器人技术的发展开辟了新的方向。
希望这种技术能够不断得到改进和推广,为更多的康复患者带来希望和帮助。
至此,对于穿戴式下肢康复外骨骼机器人的工作原理,我们进行了较为详尽的探讨。
希望通过这篇文章,你能够更深入地理解这一主题,并对其有更深刻的认识。
穿戴式下肢康复外骨骼机器人是一种对行动不便的人群具有重要意义的医疗工具。
下肢外骨骼机器人简介及其在康复领域的应用

下肢外骨骼机器人简介及其在康复领域的应用随着现代科技的快速发展,机器人技术在医学领域的应用越来越广泛,其中下肢外骨骼康复机器人为康复医学中的一项重要创新。
这种高科技设备旨在帮助下肢功能障碍的患者恢复行走能力,提高生活质量。
本文将简单介绍下肢外骨骼康复机器人的原理、应用及其发展前景。
一、原理下肢外骨骼康复机器人是一种穿戴式设备,通过外骨骼结构支撑人体下肢,并可利用电动机、传感器和智能控制系统实现辅助行走。
其结构主要包括以下几个方面:1.外骨骼结构由轻质高强度材料制成,模仿人体下肢骨骼的形态和功能,为患者提供额外的支撑和保护。
2.动力系统通常由电动机或气动装置驱动,通过关节处的传动机构实现多自由度运动,辅助患者完成站立、行走及体位转移等。
3.传感器系统内置多种传感器,如加速度计、陀螺仪、力传感器等,实时监测患者的姿态和运动状态,提供精准的反馈数据。
4.智能控制系统基于人工智能和机器学习算法,能够根据传感器数据实时调整外骨骼的运动模式,确保患者的运动稳定性和舒适性。
二、应用下肢外骨骼康复机器人主要应用于以下几个康复领域:1.神经康复对于卒中、脊豌损伤及脑瘫等导致下肢功能障碍的患者,通过外骨骼机器人进行早期康复训练,有助于神经重塑和功能恢复。
2.骨科康复在下肢骨折、关节置换术后,患者可以借助外骨骼机器人进行步态训练,促进骨骼愈合和肌肉力量的恢复。
3.老年护理随着老龄化社会的到来,许多老年人面临行动不便的问题。
外骨骼机器人可以为他们提供行走辅助,提升生活自理能力。
4.运动训练运动员在康复训练中使用外骨骼机器人,可以精确控制训练强度和动作模式,提高康复效果。
三、优势相比传统康复方法,下肢外骨骼康复机器人具有多项显著优势:1.提高康复效率通过精确的运动控制和数据反馈,显著缩短康复周期。
2.标准化训练通过标准化的程序,对同一类疾病,不同机构及不同治疗师采用标准方案实施治疗,实现训练方案的同质化。
3.数据追踪实时记录患者的康复数据,便于医生评估康复进展和调整治疗方案。
医疗外骨骼康复机器人的发展
医疗外骨骼康复机器人的发展医疗外骨骼康复机器人,简称为外骨骼机器人,是一种结合了人机交互技术、机械工程以及康复医学等学科的技术产品。
它通过智能化的电子设备,为运动功能丧失或障碍的患者提供力量与灵活性的辅助,以恢复患者的生理功能和日常生活能力。
外骨骼机器人通常由骨骼框架、传感器、关节驱动装置以及控制系统等组成,能够通过电脑控制完成对患者运动的模拟,并根据患者的需要进行调整和改进。
根据外骨骼机器人的功能和使用场景的不同,可以将其分为上肢外骨骼机器人、下肢外骨骼机器人以及全身外骨骼机器人。
上肢外骨骼机器人主要用于手臂和手部的康复训练,具有协助进行手部动作、握力恢复以及手指活动训练等功能。
下肢外骨骼机器人主要用于下肢运动能力受损患者的康复训练,可以通过模拟走路和爬楼梯等动作来帮助患者恢复日常行走和生活能力。
全身外骨骼机器人则是将上肢和下肢的功能融合在一起,更加全面地帮助患者进行康复训练。
医疗外骨骼康复机器人的发展历程可以追溯到20世纪50年代,但当时由于技术水平有限,设备笨重、成本高昂等问题,限制了机器人在康复领域的应用。
随着科技的进步,尤其是人工智能、传感器技术的快速发展,外骨骼机器人开始进入一个飞速发展的阶段。
现如今,外骨骼机器人已经逐渐实现了轻量化、智能化和便携化,可以为患者提供更为个性化的康复训练服务。
医疗外骨骼康复机器人在康复领域的应用前景广阔。
它可以帮助患者进行康复训练,恢复受损的运动功能,提高生活质量。
它可以减轻康复医生的负担,提高康复效果和效率。
外骨骼机器人还可以用于康复数据的收集和分析,为康复医学的研究提供重要的数据支持。
外骨骼机器人还可以应用于老年人日常护理、残疾人辅助活动等领域,进一步扩大了其应用范围。
目前医疗外骨骼康复机器人仍面临着一些挑战和问题。
成本问题是外骨骼机器人广泛应用的一个制约因素,高昂的价格使得其无法普及到广大患者中。
智能化程度和适应性有待进一步提高,机器人与患者的配合和交互能力仍然不足。
几种外骨骼机器人技术详解

HAL外骨骼机器人- 关键技术
HAL的双控制系统设计
运动意图估计
步态参考模型
HAL外骨骼机器人- 应用实例
HAL辅助残疾患者进行康复训练,提升患者训练的自主性,提 高康复效率,到2013年,已有160套HAL外骨骼在医疗机构应 用于康复训练测试。
HAL外骨骼机器人- 应用实例
HAL最新产品应用于福岛核电站的清理 工作,外骨骼可以防止核辐射,极大提 高工作效率
BLEEX外骨骼- 关键技术
• 拟人化结构设计技术
人步行时的 最大值 踝关节弯曲 踝关节伸展 踝关节外展 踝关节内收 膝关节弯曲 14.1° 20.6° 无效 无效 73.5° BLEEX的 最大值 45° 45° 20° 20° 121° 男性军人平 均最大值 35° 38° 23° 24° 159°
• BLEEX的受驱动关节都装有航空轴承,克服偏轴距和摩 擦力的影响,保持小断面、无间隙和低摩擦特性。 • BLEEX每条腿装有40多个不同类型传感器,实时获取运 动及力等信息。
BLEEX外骨骼- 关键技术
• 依据传感器信息,基于最小化人 机交互作用设计控制策略,控制 BLEEX伴随人体运动,保证了人 体运动的安全、自由。
科 幻 中 的 超 级 战 士 佩 戴 BLEEX
的 士 兵
BLEEX外骨骼- 技术指标
• BLEEX有两个动力拟人腿,单腿有7DOF (髋关节3DOF,膝关节1DOF,踝关节 3DOF) • 连杆采用轻质钛合金材料 • 混合液动—电动能量供给单元,能源可
维持20h持续工作
• 直线液压驱动(小巧/轻质/大力) • 自重38kg,最大负载37kg,最大负载步 行速度0.9m/s,无负载步行速度1.3m/s
HAL外骨骼机器人- 市场分析
世界十大机器外骨骼
外骨骼的本来含意是指动物的外部骨骼,用于支撑或保护内骨骼。
科学家已研制出不少性能卓越的外骨骼,帮助有需要的人更有效地打理他们的日常生活和工作。
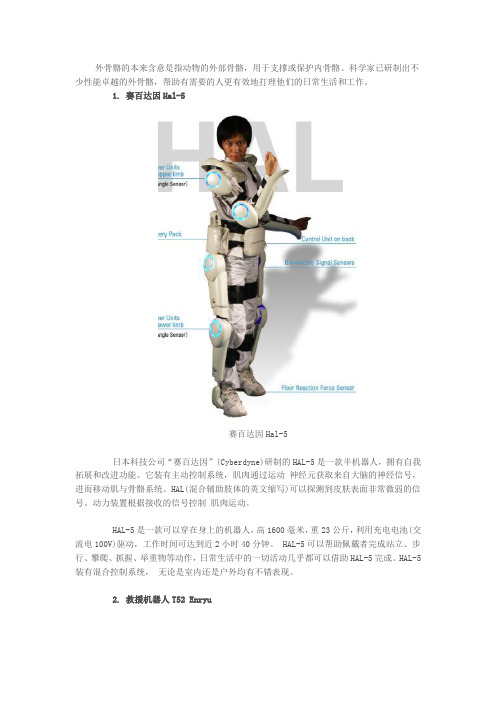
1. 赛百达因Hal-5赛百达因Hal-5日本科技公司“赛百达因”(Cyberdyne)研制的HAL-5是一款半机器人,拥有自我拓展和改进功能。
它装有主动控制系统,肌肉通过运动神经元获取来自大脑的神经信号,进而移动肌与骨骼系统。
HAL(混合辅助肢体的英文缩写)可以探测到皮肤表面非常微弱的信号。
动力装置根据接收的信号控制肌肉运动。
HAL-5是一款可以穿在身上的机器人,高1600毫米,重23公斤,利用充电电池(交流电100V)驱动,工作时间可达到近2小时40分钟。
HAL-5可以帮助佩戴者完成站立、步行、攀爬、抓握、举重物等动作,日常生活中的一切活动几乎都可以借助HAL-5完成。
HAL-5装有混合控制系统,无论是室内还是户外均有不错表现。
2. 救援机器人T52 Enryu救援机器人T52 EnryuT52 Enryu是机器人家族的一个大块头,重量近5吨,身高达到3米。
它非常强劲,可以帮助救援人员清理路面上的碎片。
T52 Enryu可以在任何灾害的救援工作中派上用场,例如地震。
它靠液压驱动,也被称之为“超级救援机器人”,能够举起重量近1吨的重物,机械臂则可以完成所有类型的动作。
T52 Enryu由日本公司Tmsuk 于1994年3月设计,而后在长冈技术科学大学接受测试。
测试中,它成功从雪堆上举起一辆汽车。
3. 松下充气式外骨骼松下充气式外骨骼松下充气式外骨骼在设计上用于帮助瘫痪患者。
它的肘部和腕部装有传感器,允许手臂控制8块人造肌肉。
人造肌肉内装有压缩空气,用于挤压瘫痪部位。
4. 伯克利·布里克外骨骼伯克利·布里克外骨骼伯克利·布里克外骨骼由美国国防高级研究计划局(DARPA)设计,致力于帮助士兵、营救人员、野火消防员以及其他所有应急人员的Bleex计划为设计提供资金支持。
六自由度外骨骼式上肢康复机器人设计

六自由度外骨骼式上肢康复机器人设计一、概述随着现代医疗技术的不断进步,康复机器人已成为辅助患者恢复肢体功能的重要工具。
六自由度外骨骼式上肢康复机器人作为一种先进的康复设备,旨在通过模拟人体上肢运动,帮助患者实现精准、高效的康复训练。
本文将对六自由度外骨骼式上肢康复机器人的设计进行详细介绍,包括其结构组成、工作原理、控制策略以及临床应用等方面的内容。
六自由度外骨骼式上肢康复机器人是一种可穿戴式的康复设备,能够紧密贴合患者上肢,通过精确控制各关节的运动,实现上肢的全方位康复训练。
该机器人具有六个自由度,可模拟人体上肢的各种复杂运动,为患者提供个性化的康复训练方案。
机器人还配备了智能传感系统,能够实时监测患者的运动状态,为医生提供精准的康复数据,从而优化康复治疗方案。
在结构组成方面,六自由度外骨骼式上肢康复机器人主要包括机械臂、驱动系统、传感系统以及控制系统等部分。
机械臂采用轻质材料制成,具有良好的穿戴舒适性和运动灵活性;驱动系统采用高精度电机,可实现精确、快速的运动控制;传感系统包括多个角度传感器和力传感器,能够实时监测机械臂和患者上肢的运动状态和交互力;控制系统则负责整合传感数据,实现机器人的运动规划和控制。
六自由度外骨骼式上肢康复机器人作为一种先进的康复设备,具有广泛的应用前景和市场需求。
本文旨在通过对该机器人设计的详细介绍,为相关领域的研究人员和技术人员提供参考和借鉴,推动康复机器人技术的不断发展和创新。
1. 上肢康复机器人的研究背景与意义随着人口老龄化的加剧以及各类事故、疾病对人们身体健康的威胁日益显著,上肢功能障碍患者数量呈现出逐年上升的趋势。
这些障碍往往由中风、外伤、神经系统疾病等多种原因引起,严重影响了患者的日常生活和工作能力,给个人、家庭和社会带来了沉重的负担。
寻求一种高效、安全的上肢康复治疗方法显得尤为重要。
在此背景下,上肢康复机器人的研究与应用应运而生,成为了医疗康复领域的重要发展方向。
几种外骨骼机器人技术详解
几种外骨骼机器人技术详解外骨骼机器人是一种以增强人类身体机能为目标的机器人,它采用物理学、生理学、力学和电子学等多种学科的知识和技术进行研发。
外骨骼机器人在医疗、军事、工业和娱乐等领域中都有广泛的应用。
本文将介绍外骨骼机器人的几种技术,包括机械式外骨骼、液压式外骨骼、气压式外骨骼和神经控制式外骨骼。
机械式外骨骼机械式外骨骼是一种由机械构造组成的外骨骼,通过人机接口传递外部控制信号来控制机械式外骨骼的运动。
机械式外骨骼主要由外骨骼结构、传递力矩机构和外骨骼控制器组成。
机械式外骨骼的优点是结构简单、制造成本低廉、维护保养容易。
但机械式外骨骼的缺点是结构笨重、运动自由度有限、对人体影响较大等。
液压式外骨骼液压式外骨骼是一种由液压机构构成的外骨骼,通过液压传动来实现加强人体动力功能的一种技术。
液压式外骨骼主要由外骨骼结构、液压动力机构和液压控制器组成。
液压式外骨骼的特点是力矩大、运动自由度高、对人体影响较小。
但液压式外骨骼的缺点是制造成本较高、液压泄漏等问题。
气压式外骨骼气压式外骨骼是一种由气动机构构成的外骨骼,通过气压传动来实现外骨骼的动力增强。
气压式外骨骼主要由外骨骼结构、气压动力机构和气压控制器组成。
气压式外骨骼的优点是运动自由度高、对人体影响小、动力输出快速精准。
但气压式外骨骼的缺点是普及程度较低、气压控制系统复杂、对气压动力的稳定性要求高。
神经控制式外骨骼神经控制式外骨骼是一种由神经学和计算机技术组成的外骨骼,通过神经控制来直接实现对外骨骼运动的控制。
神经控制式外骨骼主要由外骨骼结构、神经控制装置和计算机控制器组成。
神经控制式外骨骼的优点是操作方便、控制精准、运动自由度高、可根据体感反馈进行调整。
神经控制式外骨骼的缺点是技术成熟度较低、对神经控制的装置和计算机处理速度有一定的要求。
来说,以上几种外骨骼机器人技术各有优缺点,在不同领域中选择合适的外骨骼机器人技术可以提高生产效率,促进人类运动康复,将军事作战力量提升到新的高度,增加娱乐性等。
外骨骼机器人类型与关键技术分析

总664期第二期2019年1月河南科技Henan Science and Technology 外骨骼机器人类型与关键技术分析岳海波王伟(郑州机电工程研究所,河南郑州450015)摘要:随着科技水平的不断进步,各技术行业都得到了迅速发展。
在此背景下,人们希望设计出一种辅助人体动作,以达到提升人体运动能力或帮助人体肢体进行康复的机械装置,因此,外骨骼机器人应运而生。
外骨骼机器人是一种可穿戴的智能化机械装置,应用人机工程学、仿生学等相关知识将人与机器人结合在一起,实现人与机器人的优势互补,拥有巨大的发展潜力。
本文首先介绍了外骨骼机器人的类型,然后从外骨骼机器人构型、驱动技术、控制技术等方面入手,介绍了外骨骼机器人关键技术,最后在此基础之上,展望未来外骨骼机器人的发展趋势。
关键词:外骨骼机器人;构型;驱动技术;控制技术中图分类号:TP242文献标识码:A 文章编号:1003-5168(2019)02-0023-05Exoskeleton Robots Types and Key Technologies AnalysisYUE Haibo WANG Wei (Zhengzhou Institute of Mechanical and Electrical Engineering ,Zhengzhou Henan 450015)Abstract:With the continuous progress of science and technology,various technology industries have developed rap⁃idly.In this context,people hope to design a mechanical device to assist human motion in order to improve human motion abilityor help human limbs to recover.Therefore,exoskeleton robots emerge as the times require.Exoskele⁃ton robot is a kind of wearable intelligent mechanical device.It combines human and robot by using ergonomics,bion⁃ics and other related knowledge to realizecomplementaryadvantages betweenhumanandrobot,and hasgreat devel⁃opment potential.Firstly,the types of exoskeleton robots were introduced.Then,the key technologies of exoskeleton robots were introduced from the aspects of configuration,driving technology and control technology of exoskeleton ro⁃bots.Finally,based on this,the development trend of exoskeleton robots in the future was prospected.Keywords:exoskeleton robot ;configuration ;drive technology ;control technology 外骨骼(Exoskeleton )这一名词来源于生物学昆虫和壳类动物的坚硬外壳,其作用在于支撑、运动、防护三项功能紧密结合。