基于SIMPACK和MATLAB的ABS联合仿真
基于 SIMPACK和 MATLAB的 ABS联合仿真
基于 SIMPACK和 MATLAB的 ABS联合仿真黄鼎友;张德华【期刊名称】《工业仪表与自动化装置》【年(卷),期】2013(000)003【摘要】不论是采用逻辑门控制算法还是采用PID控制算法,目前汽车制动防抱死系统ABS的研究往往都没有考虑到路面的不平度。
为了提高ABS的精度,降低开发成本,提高匹配效率,首先必须获得车辆各子系统的拓扑结构,再用多体动力学软件SIMPACK建立整车模型。
为了更加逼真的模拟实际道路情况,采用B级道路谱,在MATLAB中搭建4通道ABS的滑模控制器,进行了联合仿真。
该仿真模型,可以用于模拟分析不同工况、不同控制参数对制动性能的影响,可以方便快捷地验证不同控制策略的有效性。
结果显示:该方法可以逼真地模拟实际车辆制动过程,有效地缩短了制动时间和制动距离,提高了车辆的安全性,同时为ABS 的研发提供了一种新途径。
【总页数】5页(P20-23,29)【作者】黄鼎友;张德华【作者单位】江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013【正文语种】中文【中图分类】TP391.9;U461.6【相关文献】1.空气悬架SIMPACK与MATLAB联合仿真研究 [J], 李姣姣;陈龙;汪若尘2.基于SIMPACK和MATLAB的汽车半主动悬架模糊控制及联合仿真 [J], 刘勺华;贝绍轶;赵景波;陈龙3.基于ADAMS和MATLAB联合仿真的ABS试验分析 [J], 来翔;李守成4.基于ADAMS与MATLAB的汽车ABS控制策略的联合仿真 [J], 郑太雄;李倩敏;邬彪5.基于Matlab与ADAMS联合仿真的ABS系统分析 [J], 张辉;万芳;白锦洋;李陆浩;冯浩因版权原因,仅展示原文概要,查看原文内容请购买。
空气悬架SIMPACK与MATLAB联合仿真研究
空气悬架SIMPACK与MATLAB联合仿真研究李姣姣;陈龙;汪若尘【摘要】A multi-body dynamics model of an air suspension bus was built by using virtual prototype technique based on SIMPACK,and a neuron self-adaptive controller under MATLAB environment was designed. Then two road models -impulse input and random input were established by using the road builder in SIMPACK,and the co-simulation of SIMPACK and MATLAB were carried out,which results show that,comparing with the passive system, the air suspension system made up of the virtual prototype model and neuron self-adaptive control scheme can effectively reduce acceleration response in vertical vibration of the vehicle,restrain the variation in body atittude and improve the ride comfort.%利用虚拟样机技术建立了基于多体动力学软件SIMPACK的空气悬架客车模型,并基于神经元自适应控制理论在MATLAB中设计了神经元自适应控制器.通过SIMPACK中的路面编辑器建立了脉冲输入以及随机输入两种路面模型,进行了SIMPACK动力学模型与MATLAB控制策略的联合仿真研究.仿真结果表明,由车辆虚拟样机模型和神经元自适应控制策略组成的空气悬架系统,相比于被动悬架系统,有效降低了车身垂直振动加速度响应,抑制了车身姿态变化,改善了客车的行驶平顺性和乘坐舒适性.【期刊名称】《机械设计与制造》【年(卷),期】2012(000)001【总页数】3页(P185-187)【关键词】空气悬架;SIMPACK;神经元自适应;联合仿真【作者】李姣姣;陈龙;汪若尘【作者单位】江苏大学汽车与交通工程学院,镇江212013;江苏大学汽车与交通工程学院,镇江212013;江苏大学汽车与交通工程学院,镇江212013【正文语种】中文【中图分类】TH16;U463.331 前言随着人们对车辆平顺性要求的不断提高和悬架技术的发展,空气悬架因其自身的独有的特点,在车辆上的使用越来越广泛,因此,空气悬架成为当今汽车领域研究的一个热点。
基于MATLAB的汽车ABS制动过程仿真
现 M a 代 n u f a 制 c t u 造 r i n g 、 & 工 P r 艺 o c e s 装 s E 备 q u i p m e n t l ● 2 o l s  ̄ ¥ 4
基 于 MAT L AB的汽 车 A B S制 动 过 程 仿 真
宋龙龙 , 郑 培 , 范满珍
MAT L AB,s i mu l a t i o n o f t h e c h a n g i n g p r o c e s s o f s u c h p a r a me t e r s a s c e n t e r o f w h e e l s l i p,wh e e l s p e e d,l i n e s p e e d,g r o u n d
滑移率、 车轮 中心速 度、 线速度 、 地面制动力和制动 力矩等参数 的 变化过 程仿真 ; 第二 , 仿真 出不 同质 心位 置对 防抱
制动 系统的影响 。由仿真 图像 可以清晰 的看 出每 一 个参数 的 变化 过程 , 便 于对今 后 A B S的改进 有更好 的理 论依
据, 并且 可知 , 当质心 的位置 由后 向前 变大时 , 可 以使制动 时间缩短 , 确保行 车的安全 。
—
b r a k i n g f o r c e a n d b r a k i n g t o r q u e a r e c a r r i e d u n d e r t h e c o n d i t i o n s o f d e c o mp r e s s ,p r e s s u r e b o o s t a n d p r e s s u r e ma i n t a i n i n g
基于Simulink的汽车ABS建模与仿真
基于Matlab/Simulink 的汽车ABS 建模与仿真摘要:本文阐述了ABS(防抱死制动系统)的基本结构、原理和控制特点。
在Simulink 的环境下以ABS(防抱死制动系统)滑移率为对象进行控制,根据ABS 系统原理建立了ABS 单车轮的仿真模型,并得出仿真曲线,验证汽车ABS 具有良好的制动性能和方向操纵性。
Modeling and Simulation of the Anti-Lock BrakingSystem based on MATLAB/SimulinkAbstract :The article illustrates basic operations and control features of ABS system. Control the ABS Slip Ratio with Simulink, creates a single wheel ABS model according to the ABS principle. It produces Simulation curves ,which verifies that the Auto ABS has good braking performance and direction of the manipulation. 引言在遭遇紧急情况下,大多数驾驶员都会将制动踏板立即踩死。
在汽车制动时,如果车轮抱死滑移,车轮与路面间的侧向附着力将完全消失:如果只是前轮(转向轮)抱死滑移而后轮还在滚动,汽车将失去转向能力;如果只是后轮抱死滑移而前轮还在滚动,即使受到不大的侧向干扰力,汽车也将产生侧滑(甩尾)现象。
这些都极易造成严重的交通事故。
为了避免因车辆滑移而带来的交通事故,有必要研究一种以滑移率为对象进行控制的防抱死制动系统(ABS )。
ABS 是提高汽车安全性能的主要因素之一,对于具有较高非线性的汽车制动过程,很难建立精确的数学模型;随着计算机技术和软件技术的迅猛发展,仿真技术已成为国内外研究的热点,并且在汽车研发中获得了广泛应用。
基于Simulink 防抱死制动系统 (ABS) 系统仿真
THANKS
模型子系统、液压制动模型子系统、电机制动模型子系统。基于PID控制的ABS电动汽车单轮模型制动系统模
块的关系如图片所示
3
Simulink模型
2014
2015
2016
2017
车轮速度子系统
为了控制制动压力的变化率,该模型从期望的滑动量中减去实际滑动量,并将此信号 馈入 bang-bang 控制(+1 或 -1,具体取决于误差的符号,请参见上图 )。此开/关速 率通过一阶时滞,该时滞表示与制动系统的液压管路相关联的延迟,为施加到车轮上 的制动扭矩。
2
ABS防抱死系统原理
2 ABS的工作原理
ABS单轮模型
3
Simulink模型
3 simulink模型
添加项目
添加项目
单击编辑此项目的详 细内容
添加项目
添项目ห้องสมุดไป่ตู้
添加项目
单击编辑此项目的详
单击编辑此项目的详
细➢内在容理论分析的基础上,利用simulink对汽车防抱制动系统的各个子系统进行图形仿真建模,主要细包内括容单轮车辆
基于simulink模型 的车辆ABS系统
滑移率控制
CONTENTS
1 问题分析 2 ABS防抱死系统原理 3 simulink模型 4 仿真分析 5 结论
1
问题分析
1 问题分析
现状
在车辆紧急制动时,驾驶员踏板往往踩死, 这种情 况下,如果车轮抱死,车 轮与路面间 的侧向附着力将完全消失:如果只是前轮 转向 轮)先于后轮抱死, 汽车将失去转向能力;如 果只是后轮先于前轮抱死,汽车将产生侧滑( 甩尾)现象。ABS是提高汽车安全性能的主要 因素之一,对于 具有较高非线性的汽车制 动 过程,很难建立精确的数学模型。本文以轿 车为研究 对象,建立了ABS数 学模型,采用 Simulink仿真软件对ABS进行仿真。单击编辑副标题
基于MATLAB的汽车ABS制动系统仿真研究
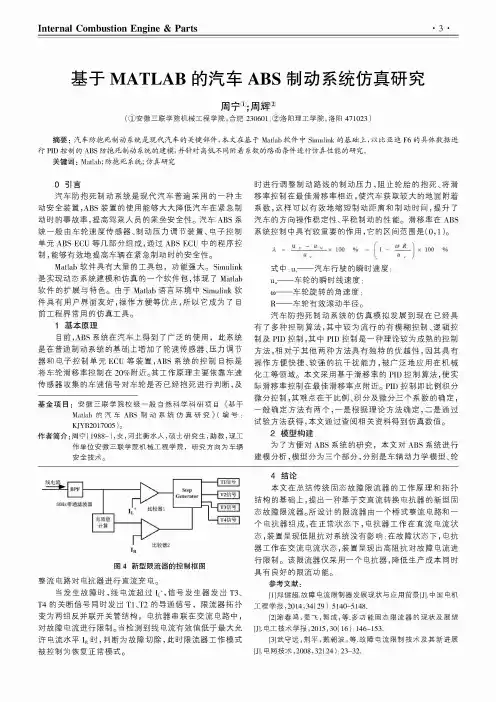
Internal Combustion Engine & Parts基于MATLAB的汽车ABS制动系统仿真研究周宁®;周辉于(①安徽三联学院机械工程学院,合肥230601;②洛阳理工学院,洛阳471023)摘要:汽车防抱死制动系统是现代汽车的关健部件,本文在基于Matlab软件中Simulink的基础上,以比亚迪F6的具体数据进 行PID控制的A B S防抱死制动系统的建模,并针对高低不同附着系数的路面条件进行仿真性能的研究。
关键词院Matlab;防抱死系统;仿真研究0引言汽车防抱死制动系统是现代汽车普遍采用的一种主 动安全装置,A B S装置的使用能够大大降低汽车在紧急制 动时的事故率,提高驾乘人员的乘坐安全性。
汽车A B S系统一般由车轮速度传感器、制动压力调节装置、电子控制 单元A B S EC:U等几部分组成,通过A B S E C U中的程序控 制,能够有效地提高车辆在紧急制动时的安全性。
M atlab软件具有大量的工具包,功能强大。
Simulink 是实现动态系统建模和仿真的一个软件包,体现了 Matlab 软件的扩展与特色。
由于M atlab语言环境中Sim u link软 件具有用户界面友好,操作方便等优点,所以它成为了目 前工程界常用的仿真工具。
1基本原理目前,A B S系统在汽车上得到了广泛的使用,此系统 是在普通制动系统的基础上增加了轮速传感器、压力调节 器和电子控制单元E C U等装置,A B S系统的控制目标是 将车轮滑移率控制在20%附近。
其工作原理主要依靠车速 传感器收集的车速信号对车轮是否已经抱死进行判断,及基金项目:安徽三联学院校级一般自然科学科研项目《基于 M atlab的汽车A B S制动系统仿真研究》(编号:KJYB2017005 )。
作者简介:周宁(1988-)女,河北衡水人,硕士研究生,助教,现工 作单位安徽三联学院机械工程学院,研究方向为车辆安全技术。
基于MATLAB的汽车ABS制动过程仿真
基于MATLAB的汽车ABS制动过程仿真ABS(Anti-lock Braking System,防抱死制动系统)是现代汽车上保证行车安全的重要制动系统之一。
ABS制动系统可以避免在制动时车轮抱死,从而提高了制动效果和稳定性。
为了深入理解ABS制动系统的工作原理和性能,本文将基于MATLAB软件进行汽车ABS制动过程的仿真。
一、建立模型和假设为了实现ABS制动过程的仿真,需要建立一个基于MATLAB 的系统模型。
该系统模型需要考虑以下几个方面:1. 汽车的运动方程。
2. 轮胎与地面的接触力,即摩擦力。
3. 制动器与车轮的接触力。
4. ABS控制器的控制策略。
在仿真过程中,假设车辆在制动前以一定的速度匀速行驶,制动时四个车轮的制动和抱死状态是相同的。
二、模型搭建在MATLAB界面中,首先利用simulink模块搭建模型。
模型如下:模型中包含了车辆运动方程、轮胎地面接触力、制动器与车轮接触力等模块。
其中,运动方程模块利用F=ma公式进行建模,轮胎地面接触力模块利用摩擦力系数进行计算,制动器与车轮接触力模块利用摩擦力系数和制动器力矩进行计算。
在模型中,还有制动器控制器模块,负责制动器的控制与调节。
制动器控制器可以采用PID算法或滑模控制算法来控制制动器的开闭和力矩大小。
三、仿真过程在进行仿真过程中,需要确定以下参数:1. 初始车速度v0=80km/h。
2. 初始刹车踏板角度θ=0。
3. 制动器摩擦力系数μs=0.7。
4. 刹车片初期转动半径r=0.05m。
在进行仿真操作前,应先在程序中设定好各参数,再设定仿真时间和仿真步长。
由于ABS制动过程会使用到控制器,因此应首先进行控制器的设计和仿真。
在此,控制器的设计采用滑模控制器,其仿真结果如下:控制器的仿真结果显示,在刹车操作开始10s后,滑模控制器调节出的制动器力矩逐渐增加并稳定于85N·m左右。
随着控制器的调节,车轮抱死现象得以解决、保持ABS制动状态下使车辆具备更好的稳定性和制动效果。
基于MATLAB/Simuli的汽车ABS半实… (
基于MATLAB/Simulink的汽车ABS半实物仿真摘要:本文所研究的是一种基于MATLAB/Simulink的汽车防抱死刹车系统(ABS)的半实物仿真的方法。
本方法利用Simulink提供的模型建立车辆的传动系模型、自动变速箱模型和ABS模型等。
所建成的这套半实物仿真系统既可在软件环境下对汽车进行仿真,也可以通过I/O接口与ABS系统相连接以观察系统的仿真效果,检验控制算法的合理性。
通过合理改变相应参数,本系统还可以模拟实际汽车在不同工况下的工作情况,极大提高了汽车电子设备的研发工作的效率。
同时,本系统也可用于教学演示。
关键词:Simulink,ABS,计算机仿真,半实物1 引言在汽车工业中,由于引进了大量的电子技术,使整车动力性、安全性、经济性、舒适性等性能得到大幅度提高。
为满足汽车电子设备研发的需要,我们建立了这套汽车电子半实物仿真系统。
本系统可以用来辅助汽车电子设备的设计、开发,减少实车实验的工作量,提高工作效率。
由于其良好的可操作性,也可作为教学演示软件使用。
2 半实物仿真由于计算机仿真是基于数学模型的仿真方法,虽然仿真成本较低,但仿真的效果取决于所建模型的质量。
在实际操作中,由于实物仿真系统很复杂,所以数学建模的难度较大。
有的系统甚至无法准确地建立数学模型。
而使用实物进行实验则受硬件设备及环境等因素的影响,成本过高,并且不容易模拟一些极限工况,所以应用也受到一定限制,而把实物系统放置在计算机仿真环节中进行仿真研究就可以解决上述问题,并能很好地综合以上两种方法的优点,所以,我们提出半实物仿真的思想。
在本文介绍的汽车半实物仿真系统中,既可以通过在计算机中建立数学模型进行仿真,也可以把仿真输出与实物汽车相连,以观察实际工作效果,验证所建数学模型的合理性和实物设备的效能。
从而降低成本,提高工作效率。
MATLAB以复数矩阵作为基本编程单元,集科学与工程计算、图形可视化、图形处理和多媒体等于一身,已在汽车工业等领域得到广泛的应用。
(仅供参考)simpack--matlab-联合仿真
SIMAT--The Link Between SIMPACK andMATLABSIMPACK Release8.816th March2006/SIMDOC v8.800COPYRIGHT INTEC GmbH2006cSIMAT:0.0-2Contents1Motivation 1.0-52Linear System Interface 2.1-72.1Linear System Matrices in MATLAB4.2...........2.1-7Motivation..........................2.1-7MATLAB-Format......................2.1-7MATRIX x-Format......................2.1-82.2Example Inverse Stick Pendulum..............2.2-93Co-Simulation Interface 3.1-133.1Co-Simulation........................3.1-13Motivation..........................3.1-13Principle Structure......................3.1-14How to Set Up the Co-Simulation Interface.........3.1-14SIMAT installation..................3.1-14Configuration of the Co-Simulation.........3.1-17Configuration of the SIMAT block..........3.1-18Configuration of the SIMPACK Model.......3.1-21Autostart...........................3.1-22Start of the command server............3.1-23Simulation Output.....................3.1-24 4Limitations 4.0-255Platform and Version Support 5.0-27SIMAT:0.0-4CONTENTSSIMAT:1.MotivationA variety of tools highly optimized for a number of different specificationsexists in thefield of complex multidisciplinary simulation.Therefore it isoften advisable to use a multibody system(MBS)program together withanother application,e.g.a control design tool,to be able to take full ad-vantage of both programs’qualities,including“toolboxes“and“modules“developed for special purposes in special software environments.Furthermore,when different teams are established for model developmentand for control design,each of them can work in its familiar software envi-ronment,on different hardware platforms,share,interchange,and simulatemodels and results.This approach can also decrease software licence de-mands and hardware requirements.SIMPACK as an’open’MBS program offers an interface to different math-ematical analysis tools,among them MATLAB.The family of SIMAT-interfaces has been enlarged to meet differentrequirements.Figure SIMAT:1.0.1:SIMAT familyThe intention of these pages is to give a detailed explanation of how toinclude and simulate models defined in the SIMPACK program package withthe help of MATLAB as well as hints how to choose the interface versionwhich is suited best to one’s needs.One part of the MATLAB program package is the graphical blockoriented tool SIMULINK.SIMULINK enables the user to combineSIMPACK models,both linear and non-linear,with other elements,con-tinuous or discrete,e.g.control elements,to form a complete systemrepresented in a block diagram form.The whole system can afterwards beedited,simulated and evaluated in the MATLAB program environment.Itis therefore possible to develop and evaluate control systems for the modelby the application of the latest control design approaches(including neuralnetworks,fuzzy control,etc.).MBS programs describe mechanical systems by sets of differential equa-tions.There are two major types of differential equations:ordinary differ-ential equations(ODEs)and differential algebraic equations(DAEs).SinceSIMAT:1.0-6SIMAT:1.MOTIVATION the MATLAB-SIMULINK tool does not offer a DAE solver,the SIMPACKmodel has to be either restricted to MBS systems described by ODE equa-tions,e.g.to systems without constraints,or a fundamentally new solutionhas to be introduced.Within SIMAT,the so-called Co-Simulation Inter-face has been ing this interface SIMULINK handles SIMPACKDAE models as discrete elements and calls the SIMAT block atfixed timesteps,while the DAE model itself is integrated by the SIMPACK kernelbetween thesefixed time points(see chapter5for more details).The SIMAT Interface allows the introduction of linear system matrices(Lin-ear System Interface)or non-linear models,by means of th Co-Simulation,to MATLAB.If a Code-Execution(codeex)license is available the exportedcode can be included to MATLAB.This can be done either as continuous so-lution(ODEs only),or if an additional solver license is available,as discretesolution where DAEs can be taken into acountSIMAT:2.Linear System InterfaceSIMAT:2.1Linear System Matrices in MATLAB4.2 MotivationSystems represented by linear system matrices generated by use of the Lin-ear System Interface are easily interchangeable not only between programpackages,but also between different computer platforms.It is thus pos-sible to implement a model in SIMPACK,design a controller by the useof MATLAB tools and to work with the results in a MATLAB or a SIMPACKsimulation.SIMPACK offers the possibility to generate a set of linear system matricesfor a multi-body system implemented by SIMPACK.These matrices can beused in other simulation and system analysis tools like MATLAB or MATRIX x.MATLAB is able to read either format,generated from SIMPACK,if theyhave thefile extension’∗.m’.MATLAB-FormatBy application of the corresponding option SIMPACK automatically gen-erates afile in the MATLAB’∗.m−file’-format.The matrices have thefollowing form:A=[-.138730020788E+02.184742168926E+02.943934646297E+01-.310978870480E+03-.687226020569E+04-.566604517831E+05.471759253145E+04-.183519688420E+04-.100766856356E+04];B=[...];C=[...];D=[...];This model description can be loaded into MATLAB workspace just by exe-cuting model descriptionfileFILENAMESIMAT:2.1-8Linear System Matrices in MATLAB4.2The linear system matrixes are then available in the MATLAB workspace.MATRIX x-FormatSimilarly it is possible to generate linear system matrices in the MATRIX x’∗.ms’-format.In this case the matrices have the following form:A=[-.138730020782E+02,.184742168925E+02,.943934646297E+01;-.310978870482E+03,-.687226020569E+04,-.566604517331E+05;.471759253144E+04,-.183519688423E+04,-.100766856256E+04];B=[...];C=[...];D=[...];mv FILENAME.ms FILENAME.mExample:Inverse Stick Pendulum SIMAT:2.2-9SIMAT:2.2Example:Inverse Stick PendulumThe well known inverse stick pendulum will be the example ofapplication of the Linear System Interface.(see also$SIM-PACK/interfaces/simat/example)1.Create a working directory including:•thefile stick pen.sys•thefile stick pen.ani2.Start SIMPACK.Open the model stick pen and create the linearsystem matrices in the MATLAB m-file format(CALCULATIONS->Linear System Matrices->For SIMPACK+MATLAB).3.Simpack generates the MATLABfile stick pen.m in your current di-rectory.4.Start MATLAB.Load the linear system matrices to the workspace withthe command’stick pen’5.Now you can check the eigenvalues of the A-matrixeig(A)ans=2.9714-2.9714Since the matrix C is still null,now define C.Depending on the choice of C the system is either completely observ-able or not completely observable.It can be checked with the helpof MATLAB if the Control Toolbox is available:(a)C=[0,1,0,0](measurement of the pendulum angle)rank(obsv(A,C))(determine observability)ans=2system not observable with C=[0,1,0,0](b)C=[1,0,0,0](measurement of the wagon displacement)rank(obsv(A,C))(determine observability)ans=4system observable with C=[1,0,0,0]rank(ctrb(A,B))(determine controllability)ans=4system fully controllable6.Try to stabilize the system with the use of pole placement.Shift theclosed-loop poles to(-1,-1,-2.97,-2.97).The Control Toolboxoffers the routines place and acker.Tofind the feedback coefficientvector type:SIMAT:2.0-10Example:Inverse Stick PendulumFigure SIMAT:2.2.1:Inverse Stick PendulumK=acker(A,B,[-1,-1,-2.97,-2.97])(For function place no two poles can exactly have the same values,the difference between two poles may be very small,though.)MATLAB will answer:K=1.0e+03*0.0450 1.58640.12020.5573ing the SIMULINK State-Space block and these Parameters asfaktors for the states in a feedback loop a stable control loop can bebuild upExample:Inverse Stick Pendulum SIMAT:2.0-11Figure SIMAT:2.2.2:Inverse Stick PendulumSIMAT:2.0-12Example:Inverse Stick PendulumSIMAT:3.Co-Simulation InterfaceSIMAT:3.1Co-SimulationMotivationThe Linear System Interface described in the chapter SIMAT:2providesthe SIMULINK integrator with the state derivatives(the so-called right-hand-side)of the linearised SIMPACK model at a given integration step.This method is restricted to linearised models.However,also non-linear models should be integrated to MATLAB.As manymechanical systems contain constraints,their mathematical models havethe form of a DAE equation and therefore cannot be directly simulatedwithin SIMULINK,because there are no DAE solvers in the SIMULINK tool.Furthermore,the mechanical SIMPACK-model and that part of the modelset up in SIMULINK might require different numerical algorithms,i.e.in-tegration methods.To overcome these problems,the Co-Simulation Interface was developed.Now,both simulated subsystems(in SIMULINK and in SIMPACK)can takeadvantage of highly optimized integrators for their specific tasks from theoriginal environments,also the maximal integration step-size can be usedfor both subsystems,independent from their mathematical description.SIMULINK enables the user to create and simulate so-called mixed typesystems.That means that both continuous and discrete blocks can be ar-bitrarily combined in one block diagram.Therefore the Co-Simulation In-terface can be embedded into an ordinary discrete block on the SIMULINKside,pretending discrete behaviour of the interface block to SIMULINK,while the whole SIMPACK model is simulated inside SIMPACK as a conti-nous model between the discrete time points(seefig.SIMAT:3.1.1).Figure SIMAT:3.1.1:Co-simulation integration procedureSIMAT:3.1-14Co-SimulationPrinciple StructureThe SIMAT Co-Simulation Interface is a two-prozess solution.Bothprozesses SIMPACK and MATLAB are solving their part of the equationsystem independently between discrete time points.The discrete timepoints are determined by the sample time period which has to be givenas a parameter by the user.If one sample time period is elapsed bothsolvers are forced to stop and the interconnecting vectors[U]and[Y]areexchanged.After that the simulation continues untill the next time stepis reached.All time steps are equidistant.The SIMAT Co-Simulation isa Master-Slave configuration.The integration parameters like start time,end time,sample time are given by the Master(MATLAB)on which theSlave(SIMPACK)reacts.System specific results can be postprocessed ineither system,this means results are available in the SIMPACK General2D plot and3D Animation.The data exchange is carried out by a socketbased TCP/IP communication.With that both systems don’t have to beavailable on one computer but within a computer network,where the com-puters with either software can be identified by their IP-address.Even aCo-Simulation via the Internet is possible.The comunication is carried outby a Client-Server configuration.The Server(SIMPACK)creates a socketon it’s local PC to which the Client(MATLAB)connects.The socketcan be identified by it’s port number and the local PC’s IP-Address.Theconection between MATLAB and the CO-Simulation socket is realised byan SIMULINK S-Function which can be parametrised by the apropriateSIMAT block To start a SIMAT Co-Simulation SIMPACK has always to bestartedfirst.Any modifications within the SIMAT-block require a runningserver as MATLAB carries out an initialisation call of the S-Function assoon as a block modification is confirmed.How to Set Up the Co-Simulation InterfaceSIMAT installationTo use the Co-Simulation the path where the SIMAT-block and the apro-priate S-Function are positioned have to be made available for MATLAB.Thefiles are located in:$SIMPACK/run/interfaces/simat/¡MATLAB Release¿/$SIMPACK CPUTYPand can be accessed via the MATLAB GUICo-Simulation SIMAT:3.1-15Figure SIMAT:3.1.2:set MATLAB path to SIMATfilesSIMAT:3.1-16Co-SimulationThe path setting has only to be done once a new SIMPACK version isinstalled.If the path was set correctly SIMAT is available by typing”simat”to the MATLAB shell.The SIMAT block can be treated like and SIMULINKS-Function blockFigure SIMAT:3.1.3:SIMAT co-simulation window(I)Co-Simulation SIMAT:3.1-17 Configuration of the Co-SimulationFigure SIMAT:3.1.4:Co-Simulation Configuration WindowThe communication and consistency settings are:•Serial/Parallel Communication Set the Communication Mode for theCo-Simulation.–With enabled serial Communication Mode(is also the defaultMode)the Co-Simulation Master integrates within the currenttime-intervalfirst and transfers the results after the integrationto the Co-Simulation Slave.Now the Slave integrates to theend of the current time-interval and transfers the results to theMaster.–With enabled parallel Communication Mode both Co-Simulation Partner integrates parallel to the end of the cur-rent time-interval and transfers then there both results to theCo-Simulation Partner.SIMAT:3.1-18Co-Simulation–This setting is also available via command line option--comm=serial or--comm=parallel.Note,the commandline setting will overwrite the num6-file settings.•Enable/Disable Consistency Set the Consistency Flag for the Co-Simulation.–With enabled Consistency(is also the defaultflag),both Co-Simulation Partner creating a consistent start vector U0be-fore the Co-Simulation Init-Call.Note:Start vector for theConsistency-Call is the U0vector defined in the sys-file–With disabled Consistency,both Co-Simulation Partner startingthe Co-Simulation with the U0vecter defined in the sys-file.–This setting is also available via command line option--cons=enabled or--cons=disabled.Note,the The com-mand line setting will overwrite the num6-file settings.From the command line:>simpack--help...****cosim_server[OPTION]TASK-FLAG MODEL-NAME**cosim_client[OPTION]TASK-FLAG MODEL-NAME**----------**master(default)**slave**matlab**amesim****OPTION:--port[=PORT-NUMBER](default20000)**-------**--address[=IPv4-ADDRESS](default127.0.0.1)****--comm[=COMMUNICATION-FLAG]**serial(default)**parallel****--cons[=CONSISTENCY-FLAG]**enabled(default)**disabled****--load-model[=LOAD-MODEL-FLAG]**active(default)**passive**...Configuration of the SIMAT blockThe Co-Simulation can be carried out with several options:1.both systems(SIMPACK and MATLAB)accessible to one or differentcomputers2.SIMPACK Co Simulation will be started manually by the user orautomatically by MATLABCo-Simulation SIMAT:3.1-19 In any case the”Sampling Period”and the”TCP-Port”of server processhave to be given.Figure SIMAT:3.1.5:SIMAT parameter block1.The TCP-Port has to be equal to the cosim.slave.port given in theSIMPACK¡model¿.num6file if no”Auto start”option is selected.If the”Auto start”Option is selected the TCP-Port must be equalto the port number given with the Command Server execution(seebelow)2.in case SIMPACK is installed on a different machine theRemote Server button has to be selected and the internet addressof the remote server process has to be edited in the line belowFigure SIMAT:3.1.6:SIMAT Remote Server3.The Auto start button has to be selected if the SIMPACK Co-Simulation should be started by MATLAB.The path and the nameof the SIMPACK model have to be edited in the line belowSIMAT:3.1-20Co-SimulationFigure SIMAT:3.1.7:Enable auto startFigure SIMAT:3.1.8:U-Vector UpdateCo-Simulation SIMAT:3.1-21Configuration of the SIMPACK ModelTo carry out the SIMAT Co-Simulation the SIMPACk Model needs to haveat least one input(u-vector)and one output(y-vector).Both can bedefined via the according icons in the SIMPACK gui1.In the given example thefirst external input(u-vector)to SIMPACKis allocated to thefirst internal time signal.Like in Time Excitationsthe internal time signals can be used as time depending externalforces or in rheonomic joints.Figure SIMAT:3.1.9:definition of the u-vectorSIMAT:3.1-22Co-Simulation2.The y-output vector can contain any values available in SIMPACK likeJonit states,Forces,Constrained Forces etc.and are to be defindevia the apropriate icon.Figure SIMAT:3.1.10:definition of the y-vector3.If the Co-Simulation is started manualy the port on which thesocket will be installed has to be edited in the¡model¿.num6fileby:cosim.slave.port=¡port¿If the configuration of the SIMPACK model is complete the Co-Simulationcan be started:AutostartIf the user enables the auto start mechanism within the SIMAT parameter-block GUI,then the SIMPACK model name must be given.Note that thismodel must contains the full path including the sys-extention.To usethis functionality,it is necessary to have a waiting command serveravailably(see SIMAT:3.1).If the command server runs on a remotemachine it is necessary to specify the internet address(IPv4-address)ofthe remote host.If all parameters with the parameter-block GUI are set,press apply to connect to the command server.Now it is possible to start,stop or hold up the simulation within the Simulink GUI.NOTE:After astop-simulation,it is possible to start the simulation again,withoutany action on the SIMPACK GUI!Co-Simulation SIMAT:3.1-23Figure SIMAT:3.1.11:start SIMAT Co-SimulationFigure SIMAT:3.1.12:Enable auto startStart of the command serverIf the command server is not started yet,then check out the followingsteps:•start a SIMPACK command shell,because the command-server needsthe SIMPACK environment.•start the command server via>$SIMPACK/run/bin/bin_$SIMPACK_CPUTYP/cmd_server$EXEEXT20000listening on port20000.•if the port is available,the command server is ready and waiting forclients to connect...************************************************************************This is the SIMPACK command-server with TCP/IP socket interface.**SIMPACK Release8800.SIMAT:3.1-24Co-SimulationFigure SIMAT:3.1.13:Enable remote server**Copyright INTEC GmbH,D-82234Wessling,Germany.**********************************************************************[cmd]Creating socket at port20000.[cmd]Command server ready and waiting for client to connect.>•if you start the command server on a remote machine,notice theinternet address(IPv4)for the SIMAT-Block.Simulation OutputTo use the SIMPACK post-processing after simulation the SIMPACK MBSmodel states as well as the SIMULINK inputs to the SIMPACK model canbe saved into separatefiles during simulation run time.The outputfilesare located in the output directory.The name of the targetfile for the states is<model>.izu.If the sampling period is non-zero,the Co-Simulation Interface will writethe SIMULINK integration results into thisfile for every sampling period ofthe SIMPACK block.Additionally,information about the input vector to the SIMPACK MBSmodel is saved in thefile<model>.uex.The twofiles will be used by the SIMPACK postprocessing modules.Re-sults and movements can be plotted and animated within SIMPACK.Thisrequires processing of the data with the execution of the SIMPACK module’calculate measurements’from the SIMPACK menu.SIMAT:4.LimitationsMBS programs describe mechanical systems by sets of differential equa-tions.There are two major types of differential equations:ordinary dif-ferential equations(ODEs)and differential algebraic equations(DAEs).Amulti body system without closed loops(and therefore without constraints)can in most cases be represented in the explicit form of an ODE.On theother hand,systems with closed loops(and thus with constraints)are repre-sented in the form of DAEs.Unfortunately the present SIMULINK version,1.3c,offers ODE solvers only.For that reason,the SIMAT Function CallInterface(chapter4)is restricted to systems which can be solved by anODE solver,in other words,systems without kinematically closed loops.However,SIMPACK systems in DAE formulation can be simulated withinSIMULINK with the help of the Co-Simulation interface,which transformsa SIMPACK DAE model to a SIMULINK discrete block during simulation.While there can be an unlimited number of SIMPACK models via the LinearSystem Interface and the Symbolic Code Interface,only one model usingthe Function Call Interface or the Co-Simulation Interface can be used ina SIMULINK model at the same time.SIMAT:4.0-26SIMAT:4.LIMITATIONSSIMAT:5.Platform and Version SupportSIMAT is available for Windows and for RedHat Linux(Redhat8-RedHatES4)on32bit platforms.。
基于SIMPACK和MATLAB的汽车半主动悬架模糊控制及联合仿真
s se b s d o MPACK a d MATL y t m a e - n SI n AB
L U h o h a, EI h o y2Z I S a - u IB a - i, HAO Jn - o, HEN L n S ig b 2C og
( c ol f uo o i n ier g C a gh uIs tt o c a o i T c nlg ,h n zo 4 C ia h o o tm bl E gn ei , h n zo tue f S A e n n i Meht nc eh o yC agh u2 1 , hn ) r o 1 36
2基于 SM A K整车动力学模 型 IP C
21前悬 架模型 .
吕河 教型轿车前悬架采用麦弗逊式独立悬架。 SMP C 在 1 AK
★ 来稿 口 : 1— 2 1 -基金项 目: 期 2 10 — 0 k 0 江苏省科技支撑项 日( E 0 8 1 ) B 2 0 14 l前悬架模 拓扑 锂
we e r d c d b 0 6 , 80 % 。 04 % . 21 % r s e t ey c mp r d wi a sv u p n i n s se r e u e y 1 . % 1 .3 7 2 .8 1 .3 e p c i l o a e t p s ie s s e so y tm v h
应用于控制系统分析与设计的1具箱 , 二 对控制系统仿真技术的发
展 和应用起到巨大的推动作用IJ 。 应用 SMP C I A K和 MA L B软 TA
件对装有半主动悬架的昌河某微型轿 车进行整车动力学联合仿 真分析。采用 多体动力学软件 SMP C / A K建立整车动力学模型 , 利用 MA L BSm l k T A / ui 设计模糊控制器 ,通过建立车辆联合仿 i n 真 系统来进行控制 , 研究车辆半主动悬架系统行驶平顺性 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s i g n e d u n d e r t h e MATL AB/s i mul i n k e n v i r o n me nt ,a t l a s t C O — s i mu l a t i o n wa s c a r ie r d o u t .I t ’ S e a s y t o e mu— l a t e t h e e f f e c t o f d e f e r e n t wo r k i ng c o n d i t i o n s a n d c o n t r o l pa r a me t e r s o n b r a k i n g p e r f o r ma n c e .Th e r e s u h s s ho we d t h a t t h e mo d e l c a n we l l s i mu l a t e t h e t r u e b r a k i ng c o n d i t i o n a nd e f f e c t i v e l y s h o r t e n b r a k i n g d i s — t a n c e a nd t i me, i mp r o v e t h e s a f e t y o f t h e v e h i c l e a n d a l s o p r o v i d e s a n e w me t h o d or f t h e r e s e a r e h
h i c l e wa s e s t a b l i s h e d b y S I MP ACK ,t h e n,s l i di n g mo d e c o n t r o l l e r f o r f o u r — wh e e l v e hi c l e b r a k i n g wa s d e —
・
2 0・
工业仪表与 自动化装置 Βιβλιοθήκη 2 0 1 3年第 3期
基于S I MP AC K 和 MAT L A B的 A B S联合 仿 真
黄鼎友 , 张德华
( 江 苏大 学 汽车 与交通 工程 学院 , 江苏 镇江 2 1 2 0 1 3 ) 摘要 : 不论 是 采 用逻 辑 门控 制 算 法还是 采 用 P I D控 制 算 法 , 目前汽 车制 动 防抱 死 系统 A B S的 研 究往 往都 没有 考虑到路 面的不平度 。 为 了提 高 A B S的精 度 , 降低 开发 成本 , 提 高 匹配效 率 , 首先
必须 获得 车辆各 子 系统 的拓扑 结构 , 再 用 多体动 力 学软 件 S I MP A C K建 立整车模 型 。为 了更加 逼真 的模 拟 实际道 路 情况 , 采用 B级 道路谱 , 在M A T L A B 中搭 建 4通道 A B S的滑模控 制 器 , 进 行 了联 合
仿真 。该仿 真模 型 , 可以用 于模 拟 分析不 同工 况、 不 同控制 参 数 对制 动性 能的影 响 , 可 以方便 快捷 地验 证 不 同控 制策略 的有 效性 。结果显 示 : 该 方法 可 以逼 真地模拟 实际车辆制 动过程 , 有效 地缩短
s t u d y d i d n o t t a k e i n t o c o n s i d e r a t i o n o f t h e r o a d s u r f a c e r o u g h n e s s .I n o r d e r t o i mp r o v e t h e a c c u r a c y,
ma t c h i n g e ic f i e n c y a nd r e d uc e t h e c o s t o f d e v e l o p me n t .F i r s t a mu l t i—b o d y d y n a mi c mo d e l o f a f u 1 1 v e —
C0 . s i m ul a t i o n o f ABS f o r v e hi c l e s ba s e d o n S I M PACK a n d M ATLAB
HUAN G Di n g y o u,Z HANG D e h u a
( S c h o o l o fA u t o m o b i l e a n d z 呦 c E n g i n e e r i n g, J i a n g s u U n i v e r s i t y , J i a n g s u Z h e n j i a n g 2 1 2 0 1 3, C h i n a ) Ab s t r a c t : Wh e t h e r u s i n g t he l o g i c g a t e c o n t r o l a l g o r i t h m o r u s i n g P I D c o n t r o l a l g o r i t h m ,t h e p r e s e n t