CAN-bus拓扑结构解析
CAN总线系列讲座第二讲——CAN总线的结构

CAN总线系列讲座第二讲——CAN总线的结构
一CAN总线拓扑结构CAN是一种分布式的控制总线,总线上的每一个节点一般来说都比较简单,使用MCU控制器处理CAN总线数据,完成特定的功能;通过CAN总线将各节点连接只需较少的线缆(两根线:CAN_H和
CAN_L),可靠性也较高。
ISO11898定义了一个总线结构的拓扑:采用干线和支线的连接方式;干线的两个终端都端接一个120欧姆终端电阻;节点通过没有端接的支线连接到总线;对干线与支线的参数都进行了说明。
表1干线与支线的网络长度参数
CAN-bus位速率
总线长度
支线长度
节点距离
1Mbps
最大40m
最大0.3m
最大40m
5Kbps
最大10Km
最大6m
最大10Km
在实际应用中可以通过CAN中继器将分支网络连接到干线网络上,每条分。
CANBUS总线布线说明
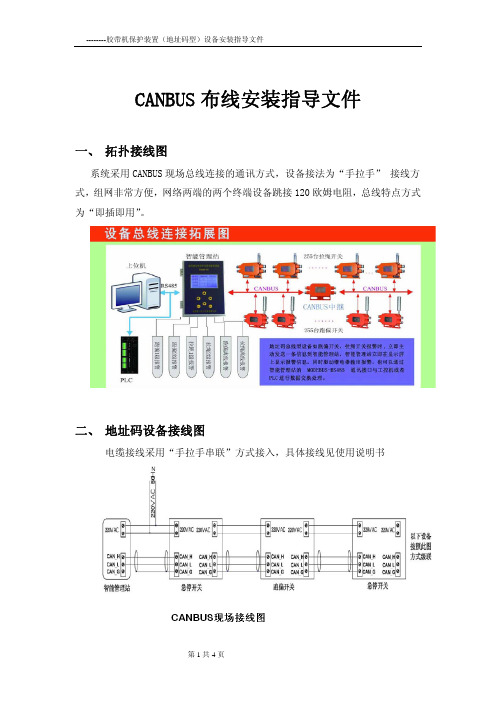
CANBUS布线安装指导文件一、拓扑接线图系统采用CANBUS现场总线连接的通讯方式,设备接法为“手拉手” 接线方式,组网非常方便,网络两端的两个终端设备跳接120欧姆电阻,总线特点方式为“即插即用”。
二、地址码设备接线图电缆接线采用“手拉手串联”方式接入,具体接线见使用说明书三、组件网络的基本原则组建网络的基本原则,见下图左面的A、B、C是不正确的,D、E、F是正确的。
不恰当、错误的组建网络在低速率、近距离下是可以完成通讯,但是在高速率、远距离情况下就得按照正确的连接方式进行组建网络。
四、网络搭建系统网络的组成可以由以下两个网络组合单一主网络:只有一个主干线网络。
子网络:分支网络。
CANBUS系统总线可以由多个子网络组成,每个子网络必须满足以下条件: (1)同一网络中允许挂接110个节点(2)传输距离最远为10千米(3)采用指定通讯电缆传输数据如果子网络超出以上任一条件,须增加CANBUS中继器来组成 多子网络。
以下是CANBUS单个网络的结构:子网络的拓展:因为现场建筑影响走线,需要有一大段没有终端设备接入电缆走线,此时增加了无用的电缆成本,因此可以考虑多组建一个子网络来减少成本的投入。
采用一个中继器作为子网络的拓展接入点,见下图五、终端匹配电阻接入在一个单一网络或者一个子网络中,要保证信息可靠传输,就要在通讯网络的两端终端设备接入120Ω匹配电阻。
才能在高速长距离中通讯中减少信号反射得到可靠的传输。
六、CAN总线方式优点:1、线路简单有利于综合布线,节省管线材,具有组网自由、安装方便、扩充容易,改造灵活。
2、硬件连接简单, 具有实时性强、可靠性高、通信速率快、结构简单、互操作性好、总线协议具有完善的错误处理机制、灵活性高和价格比高。
3、数据传输速率高,在传输距离小于40 m时,最大传输速率可达1 Mb/s,传输距离10km时速率达5kbps。
4、传输距离远,扰干扰能力强。
5、具有突出的可靠性、实时性和灵活性。
CAN-bus电缆、CAN-bus插座、CAN-bus布线规范

Signal assi gnment of wire and conn ection of earthing and terminator
CAN wire with connectors
DSUB9 connector (female or male) pin designation
Shield
(at outer wire shield) n.c.
工程应用笔记
目录
1.适用范围................................................................................................................ 1 2.电缆选择................................................................................................................ 2
2.1 2.2 2.3 最低要求 ...................................................................................................................2 电缆选择的要素 .......................................................................................................2 电缆选择的极限值 ...................................................................................................2 2.3.1 电缆结构 ...........................................................................................................2 2.3.2 电缆有效电阻 ...................................................................................................3 2.3.3 DB9 连接器的有效电阻 ..................................................................................3 2.3.4 电缆适用类型示例 ...........................................................................................3 2.4 取决于电缆长度的波特率 .......................................................................................5 2.4.1 CiA推荐的位定时 ............................................................................................5 2.4.2 采用本文 CAN接口时最大的导线长度.........................................................6 2.5 布线长度、节点数量、线缆线径之间的关系 .......................................................7 配线和连接 ...............................................................................................................9 DB9 连接方式的插座与插头 ................................................................................10 OPEN5 连接器 .......................................................................................................13
矿用canbus概述

1. 现场总线CAN-bus 在煤矿通讯中的上风煤矿生产是与国计民生密切相关的一个领域。
其中,煤矿安全无疑是大家关注的热门之一,不仅对社会经济有影响,更关系到每个矿业职员的生命安全。
煤矿系统中原先的各类独立设备已经不能够满足现代化煤矿生产的需求;组建一个技术先进的煤矿通讯网络,对煤矿的工作职员、现场环境参数进行监测、控制,形成一个能够满足地域化控制、符合煤矿安全要求的煤矿数据/信息治理系统,这已经是煤矿行业的发展大趋势。
煤矿企业内部通过煤矿通讯网络传输各类现场数据;通常传输的是来往于各个现场设备之间的控制类数据,一般都属于小流量、实时数据。
煤矿通讯主要涉及以下两个方面的应用:●考勤和巡检系统●作业现场环境监测同时,煤矿通讯具有非常明显的自身行业特点:●设备符合本质安全要求●现场环境恶劣●通讯间隔较远●数据传输要求可靠实时●同一网络设备节点较多按国家对煤矿企业中现场通讯设备的参数要求,目前在煤矿行业中可运行的常见通讯方式有串行通讯RS-485、现场总线CAN-bus、调制解调Modem、无线通讯等几种方式。
本文将对比这几种通讯方式,并结合实际项目的运行经验,从而汇总一些煤矿行业应用现代化通讯的特点、上风,并且先容现场总线CAN-bus 的主要上风。
1、串行通讯RS-485国际EIA 协会在1983 年制定了RS-485 标准,这是一个串行通讯的电气标准。
与第一代的RS-422 标准相比,RS-485 标准支持多点、双向通讯能力,即答应多个发送器连接到同一条总线上,同时增加了发送器的驱动能力和冲突保护特性,扩展了总线共模范围。
RS-485 标准是一种实现本钱较低的多点网络通讯方式,通用RS-485 收发器的价格低于10 元/个;RS-485 网络是最常见到的通讯方式之一,单一网络能够连接32 个节点,通讯间隔够达到1200 米;RS-485 设备可以基于普通单片机UART 端口进行开发,电路设计简单。
CAN-bus拓扑结构详解

Node 2
Node n
R
R
致远电子
传递价值 成就你我
http://www.embedcontrol. com
网络长度参数
CAN-bus 位速率:1Mbps
总线长度:最大40m 支线长度:最大0.3m 节点距离:最大40m
CAN-bus 位速率:5Kbps
总线长度:最大10Km 支线长度:最大6m 节点距离:最大10Km
CAN-bus国际标准 ISO 11898
ISO 11898-1/2/3 ISO 11898-4
注意:
CAN-bus 底层协议只定义物理层、数据链路层。 CAN 2.0规范、国际标准ISO 11898是设计CAN应用系统的基本依据。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
NODE
致远电子
传递价值 成就你我
http://www.embedcontrol. com
线性拓扑的扩展(二)
多条分支网络通过集线器(HUB)连接到干线 每个分支网络符合ISO 11898标准
CAN-bus CANhub 集线器
- Acceptance Filtering - Overload Notification - Recover Management
http://www.embedcontrol. com
CAN节点与总线连接
CAN节点通过支线连接到总线
总线型拓扑概念

总线型拓扑概念1. 概念定义总线型拓扑(Bus Topology)是计算机网络中最简单的拓扑结构之一,它是指所有计算机节点都通过一条共享的传输介质连接在一起的网络结构。
在总线型拓扑中,所有节点都直接连接到同一条传输介质上,没有任何中央控制节点。
总线型拓扑的特点包括: - 所有节点都共享同一条传输介质。
- 传输介质通常是一根电缆或光纤。
- 每个节点通过一个适配器与传输介质相连。
- 数据通过广播方式发送到整个网络。
2. 关键概念2.1 传输介质总线型拓扑中最重要的概念是传输介质。
它是连接所有计算机节点的物理通道,可以是电缆、光纤或无线信号等。
传输介质通常是双向的,可以同时进行数据的发送和接收。
2.2 节点在总线型拓扑中,每台计算机被视为一个节点。
每个节点通过一个适配器(也称为网络接口卡)与传输介质相连。
适配器将数据从计算机转换成能够在传输介质上传输的格式,并负责将数据发送到总线上或接收总线上的数据。
2.3 总线总线是连接所有节点的物理通道,它承担着数据传输的任务。
总线可以是一根电缆或光纤,也可以是无线信号。
在总线型拓扑中,所有节点都通过总线进行通信。
2.4 数据传输在总线型拓扑中,数据通过广播方式进行传输。
当一个节点发送数据时,它将数据发送到总线上,并且所有其他节点都能够接收到这个数据包。
每个节点根据自己的地址来判断是否要接收这个数据包。
如果地址与自己匹配,则接收并处理该数据包;如果地址不匹配,则忽略该数据包。
2.5 冲突检测由于多个节点共享同一条传输介质,可能会出现冲突问题。
当两个或更多个节点同时发送数据时,它们的信号会在传输介质上发生碰撞,导致信号干扰和数据丢失。
为了解决这个问题,总线型拓扑通常采用冲突检测机制来避免碰撞发生。
3. 重要性和应用3.1 简单易实现总线型拓扑是计算机网络中最简单的拓扑结构之一,它的实现非常简单。
只需要一根传输介质和适配器即可连接多台计算机。
这种简单性使得总线型拓扑在小型局域网中得到广泛应用。
汽车车身电控系统检修-CANBUS总线系统结构及传输原理
CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
(4)数据总线 CAN数据总线是用于传输数据的双向数据线,分为CAN高位(CAN-High)线和 CAN低位(CAN-Low)数据线。数据没有指定接收器,数据通过数据总线发送给各 控制单元,各控制单元接收后进行处理。
CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
(4)数据总线 CAN数据总线采用两条线相互扭结成双绞线,两条线上的电位是相反的,如果一条 线的电压是5V,另一条线就是0V,两条线的电压总和等于常值。双绞线可以有效防 止对车辆内的其他设备产生电磁干扰,同时也可消除因为电压在CAN数据总线上快 速变换而产生的磁场干扰。
CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
CAN-BUS数据总线的数据传输原理在很大 程度上类似电话会议的方式。一个用户 (控制单元)向网络中“说出”数据,而 其他用户“收听”到这些数据。若控制单 元认为这些数据对它有用,它就接收并且 应用这些数据,而其他控制单元也许不会 理会这些数据。故数据总线里的数据并没 有指定的接收者,而是被所有的控制单元 接收及计算。
CAN-BUS总线系统结构及传输原理
三、CAN-BUS数据总线的传输过程
数据的具体传输过程: ③ 接收数据。所有与CAN-BUS数据总 线相连构成网络的控制单元成为接收器, 从CAN-BUS数据总线上接收数据。 ④ 检查数据。控制单元对接收到的数据 进行检查,看是否是其功能所需。 ⑤ 接受数据。如果所接收的数据是需要 的,它将被认可及处理,反之将其忽略。
CANBUS协议-物理层及链路层详细分析
CAN如何工作(二)
CAN 能够使用多种物理介质,例如双绞线、光纤等,最常用的就 是双绞线。信号使用差分电压传送,两条信号线被称为“CAN_H” 和 “CAN_L”, 静态时均是2.5V 左右,此时状态表示为逻辑1 ,也可 以叫做“隐性” 。用CAN_H 比CAN_L 高表示的逻辑0, 称为“显 性”,此时通常电压值为CAN_H =3.5V 和CAN_L = 1.5V 。
CAN,全称为“Controller Area Network”, 即控制器局域 网,是国际上应用最广泛的现场总线之一。最初,CAN 被设计作为汽 车环境中的微控制器通讯,在车载各电子控制装置ECU 之间交换信 息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、 仪表装备、电子主干系统中,均嵌入CAN 控制装置。
流控帧在不同的车上可能会不一样。
命令交互方式(四)
发多帧回一帧:
Tools : 08H FCH00H 10H 16H 01H 02H 03H 04H 05H 06H ECU : 08H FDH00H 30H 00H 00H 00H 00H 00H 00H 00H Tools : 08H FCH00H 21H 07H 08H 09H 0AH0BH 0CH 0DH Tools : 08H FCH00H 22H 07H 0EH 0FH 10H 11H 12H 13H Tools : 08H FCH00H 23H 14H 15H 16H 00H 00H 00H 00H ECU : 08H FDH00H 04H 41H 02H FFH 01H 00H 00H 00H
CANBUS协议物理层 及链路层详细分析
2012-2-20
目的
本文档的目的是指导我们熟悉CANBUS通讯协议的物理层及链路层,便于我 们更好的开展有关CANBUS的相关工作。
can总线拓扑结构方案
CAN总线拓扑结构方案简介CAN(Controller Area Network)总线是一种常用于现代汽车、工业控制和其它应用的串行通信协议。
它的主要特点是高可靠性、实时性和高带宽,被广泛应用于车载电子系统和工业领域。
在CAN总线系统中,拓扑结构方案的设计起着至关重要的作用。
本文将介绍几种常见的CAN总线拓扑结构方案,并对各种方案的特点、优缺点进行比较和分析。
单总线拓扑结构单总线拓扑结构是最简单的拓扑结构方案,也是最常用的方案之一。
在单总线拓扑结构中,所有节点都直接连接到同一根总线上。
节点之间通过总线共享数据和通信。
特点•简单、容易实现和维护。
•总线长度可以较长,适合中大型系统的应用。
•总线上只有一个主节点,其他节点均为从节点。
优点•简化硬件设计,减少成本。
•节省总线线缆和器件的使用。
缺点•对于大型系统,总线长度过长会导致信号衰减和反射现象。
•节点数过多时,总线的负载会过重,影响总线性能。
星型拓扑结构星型拓扑结构是另一种常见的拓扑结构方案。
在星型拓扑结构中,所有节点都通过独立的连线连接到主节点(集线器或交换机)。
特点•易于添加或移除节点,不影响其他节点的通信。
•可以通过改变主节点的位置来改变系统的结构。
优点•总线长度可以更长,较少信号衰减和反射问题。
•每个节点之间的通信不会影响其他节点的通信。
缺点•需要更多的线缆。
•需要额外的集线器或交换机等设备。
环型拓扑结构环型拓扑结构是一种将所有节点构成环形的拓扑结构方案。
在环型拓扑结构中,每个节点都与相邻的节点连接,形成一个闭环。
特点•每个节点之间可以直接通信,无需通过中间节点。
•所有节点都能接收到通过总线传输的数据。
优点•可以实现较高的传输速率。
•可以实现实时性较高的通信。
缺点•每个节点都需要两个接口,增加成本。
•添加或移除节点需要重新布线。
混合拓扑结构混合拓扑结构是将多种拓扑结构方案结合在一起的方案。
在混合拓扑结构中,可以同时使用单总线、星型、环型等多种拓扑结构。
canbus总线
CAN总线1. 简介CAN(Controller Area Network)总线是一种串行通信协议,广泛应用于汽车、工控等领域中。
它是一种高可靠性、高抗干扰的通信方式,具有多主机、多从机的结构,能够支持多个节点之间的通信。
2. CAN总线的特点2.1 高可靠性CAN总线采用差分传输方式,通过在两条通信线上分别传输互补的信号来实现数据传输,可以有效地抵抗传输线上的电磁干扰和噪声。
此外,CAN总线拥有校验机制,当数据传输过程中发生错误时,接收端可以通过异或校验位来检测错误,并进行纠正。
2.2 多主从结构CAN总线可以支持多个主机和多个从机的通信。
主机用于发送命令和控制数据的节点,从机用于接收并执行命令的节点。
这种结构使得CAN总线非常适用于分布式控制系统,能够实现多个节点之间的实时通信。
2.3 高速通信CAN总线的通信速率可以达到几百kbps甚至几Mbps,可以满足多数应用的通信需求。
高速通信可以保证节点之间的实时性,并且降低通信延时。
2.4 灵活的网络拓扑结构CAN总线支持多种网络拓扑结构,包括总线型、星型、树型等。
这种灵活的结构使得CAN总线可以适用于不同的应用场景,如汽车电子系统中的各种控制模块之间的通信。
3. CAN总线的应用3.1 汽车领域CAN总线在汽车领域中得到了广泛应用。
汽车中有许多控制模块,如发动机控制单元(ECU)、制动控制单元(BCU)、车身控制单元(BCU)等,这些模块之间需要进行实时通信才能保证汽车的正常运行。
CAN总线通过其高可靠性和实时性,成为了汽车电子系统的首选通信协议。
3.2 工控领域在工控领域中,CAN总线也得到了广泛应用。
工控设备通常需要各种传感器和执行器之间的实时通信,以实现工艺过程的监控和控制。
CAN总线可以提供高可靠性的通信,并且支持多主从结构,非常适用于工控场景。
4. CAN总线的实现4.1 硬件实现CAN总线的硬件实现主要包括CAN控制器和CAN收发器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
http://www.embedcontrol. com
CAN-bus拓扑结构和传输介质
Version 1.20版
2006年5月
致远电子
传递价值 成就你我
http://www.embedcontrol. com
CAN底层协议
CAN-bus 规范( Version 2.0 )
CAN2.0A :CAN标准报文格式 CAN2.0B :CAN标准报文格式和扩展报文格式
CAN-bus 传输介质
致远电子
传递价值 成就你我
http://www.embedcontrol. com
物理层
Logical Link Control (LLC)
OSI参考模型
Application Presentation Session Transport Network Data Link Layer
系统设计原则
复杂系统有二个基本设计原则
集中式 分布式
大部分网络协议,如CAN-bus、ProfiBus、 EtherNet、USB、IrDA® 等都采用了把智能 单元分布在整个网络中的分布式设计原则。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
分布式的控制原则
Node 2
Node n
R
R
致远电子
传递价值 成就你我
http://www.embedcontrol. com
网络长度参数
CAN-bus 位速率:1Mbps
总线长度:最大40m 支线长度:最大0.3m 节点距离:最大40m
CAN-bus 位速率:5Kbps
总线长度:最大10Km 支线长度:最大6m 节点距离:最大10Km
- Acceptance Filtering - Overload Notification - Recover Management
例二:DeviceNet网络支线<0.3米。
Termination Resistor RT
CAN_H
CAN Busline
CAN_L
RT
致远电子
传递价值 成就你我
http://www.embedcontrol. com
线性拓扑示例
符合ISO 11898网络拓扑结构的CAN网络
NODE
NODE
NODE
线性拓扑
线性拓扑
ISO 11898定义了一个单线结构的拓扑
采用干线和支线的连接方式
干线的两个终端都端接一个终端电阻
节点通过没有端接的支线连接到总线 对干线与支线都规定了参数限制
致远电子
传递价值 成就你我
http://www.embedcontrol. com
线性拓扑示意图
ISO 11898 CAN-bus网络拓扑示意图
CAN是一种分布式的控制总线
很多控制器协同完成特定功能的任务;
每个节点一般来说比较简单,使用微型单片机; 更高的可靠性; 较少的线缆。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
CAN-bus拓扑结构
致远电子
传递价值 成就你我
http://www.embedcontrol. com
的不同;
总线电缆的串联阻抗、总线节点的输入阻抗而使
信号幅值下降。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
总线有效长度与传输速率
基本公式: ×
Max Bit Rate [Mbps] Max Bus Length[m]
≤ 60
致远电子
传递价值 成就你我
NODE
NODE
NODE
NODE
NODE
NODEΒιβλιοθήκη NODENODENODE
NODE
NODE
致远电子
传递价值 成就你我
http://www.embedcontrol. com
线性拓扑的扩展(二)
多条分支网络通过集线器(HUB)连接到干线 每个分支网络符合ISO 11898标准
CAN-bus CANhub 集线器
http://www.embedcontrol. com
CAN节点与总线连接
CAN节点通过支线连接到总线
CAN-Controller
TX0 TX1 RX0 RX1
支线长度的限制: 例一:单分支<6米,总长<30米;
TxD
RxD
Ref Rs
CAN Transceiver PCA82C250
CAN_L CAN_H
CAN-bus国际标准 ISO 11898
ISO 11898-1/2/3 ISO 11898-4
注意:
CAN-bus 底层协议只定义物理层、数据链路层。 CAN 2.0规范、国际标准ISO 11898是设计CAN应用系统的基本依据。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
Node 1
Termination
Node 2
… …
Node n
CAN Busline
120
CAN_H CAN_L
120
L
致远电子
传递价值 成就你我
http://www.embedcontrol. com
ISO11898-2标准
3.5 V
CANH
2.5 V
CANL
1.5 V
Node 1 Termination
其他CAN-bus网络
CAN-bus CAN-bus CAN节点 CAN节点 CAN节点
CAN-bus
其他CAN-bus网络
CAN节点
CAN节点
CAN节点
CAN节点
CAN节点
CAN节点 终端电阻
CAN节点 终端电阻
CAN节点 终端电阻
致远电子
传递价值 成就你我
http://www.embedcontrol. com
NODE
NODE
NODE
NODE
NODE
NODE
致远电子
传递价值 成就你我
http://www.embedcontrol. com
线性拓扑的扩展(一)
分支网络通过中继器(Reapter)连接到干线 每个分支网络符合ISO 11898标准
Repeater Repeater Repeater
NODE
允许的最大支线长度计算请参考《PCA82C250应用指南》。
致远电子
传递价值 成就你我
http://www.embedcontrol. com
总线最大线路长度
总线最大线路长度基本取决于以下物理条件
连接的总线节点、CAN 控制器、收发器等元件的
循环延迟以及总线的线路延迟;
由于节点间相关的振荡器容差而造成位定时额度