第2章 ARM技术概述
第二章 ARM9体系结构ppt课件

ARM9E-S ARM10TDMI,ARM1020E ARM11,ARM1156T2-S,ARM1156T2F-S, ARM1176JZ-S,ARM11JZF-S
.
2.1.1 ARM公司简介
ARM公司是知识产权IP ( Intellectual Property ) 公司,本身不生产芯片,只转让设计许可,由合 作伙伴公司来生产各具特色的芯片。
目前,全世界有几十家著名的半导体公司都使用 ARM公司的授权,其中包括Intel、IBM、 MOTOROLA、SONY、NEC、LG 、 ATMEL 等, 从而保证了大量的开发工具和丰富的第三方资源, 它们共同保证了基于ARM处理器核的设计可以很 快投入市场。
灵活方便的协处理器接口
ARM体系结构具有协处理器接口,允许接16 个协处理器。既可以使基本的ARM处理器内核尽 可能小,方便地扩充ARM指令集,也可以通过未 定义指令来支持协处理器的软件仿真。
低电压功耗的设计
考虑到ARM处理器主要用于手持式嵌入式系 统中,在设计中. 就十分注意功耗的设计。
2.1.3 ARM指令系统版本
难以优化编译成高效目标 代码
能优化编译成高效目标代码
.
2.1.2 ARM体系结构的特点
多种处理器模式 ARM体系结构定义了7种处理器模式:用户、 快 中断、中断、管理、终止、未定义和系统模式, 大大提高了ARM处理器的效率。
两种处理器工作状态 ARM状态(32位指令)和Thumb状态(16位指
令) 。 虽然ARM处理器本身是32位设计,但考虑到
第2章 ARM体系结构

• 控制位
–
程序状态寄存器PSR(Program Status Register)的最低8位I、F、T和 M[4:0]用作控制位。当异常出现时改变控制位。处理器在特权模式 下时也可由软件改变。
• 中断禁止位 I:置1,则禁止IRQ中断; F:置1,则禁止FIQ中断。 • T位 T=0 指示ARM执行; T=1 指示Thumb执行。 • 模式控制位 M4、M3、M2、Ml和M0(M[4:0])是模式位,决定处理器 的工作模式,如表2.3.1所列。
6 (最低)
6 5
数据中止
IRQ (外部中断请求) FIQ (快速中断请求)
中止(数据)
IRQ FIQ
中止模式
IRQ FIQ
0x0000,0010
0x0000,0018 0x0000,001C
2
4 3
2.4.2 异常类型的含义
(1)复位
• • 处理器的复位电平有效时,产生复位异常 当ARM处理器或协处理器遇到不能处理的指令时,产生未定义指令异常
2.4 ARM微处理器的异常处理
• 异常:在一个正常的程序流程执行过程中,由内 部或外部源产生的一个事件使正常的程序产生暂 时的停止,称之为异常。
2.4.1 ARM体系结构的异常类型
• ARM体系结构支持7种类型的异常
• 异常出现后,强制从异常类型对应的固定存储器地址开始 执行程序。这些固定的地址称为异常向量(Exception Vectors)。
M[4:0]模式控制位
M[4: 0] 10000 10001 10010 10011 10111
处理器工作 模式 用户模式 FIQ模式 IRQ模式 管理模式 中止模式
可访问的寄存器 PC,CPSR,R14~R0 PC,R7~R0,CPSR, SPSR_fiq,R14_fiq~ R8_fiq PC,R12~R0,CPSR, SPSR_irq,R14_irq, R13_irq PC,R12~R0, CPSR, SPSR_svc,R14_svc, R13_svc PC,R12~R0, CPSR, SPSR_abt,R14_abt, R13_abt
单片机课件第二章 ARM体系结构

2.5
ARM微处理器指令系统
2.5.1 基本寻址方式
寻址方式是根据指令中给出的地址码字段来实现寻找真实操作数地 址的方式,ARM处理器有9 种基本寻址方式。
1.寄存器寻址
操作数的值在寄存器中,指令中的地址码字段给出的是寄存器编 号,指令执行时直接取出寄存器值操作。
例如指令: MOV R1,R2 SUB R0,R1,R2
11111
系统模式
PC,R14~R0,CPSR(ARM v4及以上版本)
并非所有的模式位组合都能定义一种有效的处理器模式。其他组合的 结果不可预知。
2.2 ARM微处理器的寄存器结构
2.2.4 Thumb状态的寄存器集
2.2 ARM微处理器的寄存器结构
2.2.4 Thumb状态的寄存器集
Thumb 状态的寄存器在ARM 状态的寄存器上的映射
在Thumb状态下,程序计数器PC(Program Counter)使用位[1]选 择另一个半字。ARM处理器在两种工作状态之间可以切换。
Thumb状态:当操作数PSR控制位T为1时,执行BX指令进入Thumb 状态。如果处理器在Thumb状态进入异常,则当异常处理(IRQ、 FIQ、Undef、Abort和SWI)返回时,自动转换到Thumb状态。(异 常都是在ARM 状态中执行) ARM状态:当操作数PSR控制位T为0时,执行BX指令进入ARM状态 ;处理器发生异常(IRQ、FIQ、Reset、Undef、Abort和SWI)。在 此情况下,把PC内容复制到异常模式的链接寄存器中,并且异常处 理将从异常向量地址开始。
sys(系统模式):运行具有特权的操作系统任务。
und(未定义指令中止模式):当未定义的指令执行时进入该 模式,可用于支持硬件协处理器的软件仿真。
02-ARM技术概述

2.1 ARM体系结构的发展历史和技术特征
1. ARM发展的历程 2. ARM体系结构的技术特征
1、ARM发展的历程
最近10多年来ARM技术的突出成果表现在:
使用“Thumb”的新型压缩指令格式,使得应用系统开 发可降低系统成本和功耗; ARM9、ARM10、Strong-ARM 和 ARM11 等 系 列 处 理 器的开发,显著地提高了ARM的性能,使得ARM技术 在面向高端数字音、视频处理等多媒体产品的应用中更 加广泛; 更好的软件开发和调试环境,加快用户产品开发; 更为广泛的产业联盟使得基于ARM的嵌入式应用领域 更加广阔; 嵌入在复杂SoC中、基于ARM核的调试系统代表着当 今片上调试技术的前沿。
V4T
V4 V4T V5TE V5TE V6 V7
ARM9E-S
ARM10TDMI,ARM1020E ARM11,ARM1156T2-S,ARM1156T2F-S,ARM1176JZ-S, ARM11JZF-S Cortex A7,Cortex A8,Cortex A9
2、ARM体系结构的演变
1)Thumb指令集(T变种) Thumb指令集是把32位的ARM指令集的一个子集重 新编码后而形成的一个特殊的16位的指令集 2)长乘指令(M变种) 长乘指令是一种生成64位相乘结果的乘法指令(此 指令为ARM指令),M变种增加了两条长乘指令
2.6 ARM寄存器组成
1. 2. 3. ARM寄存器组成概述 ARM状态下的寄存器组织 Thumb状态下的寄存器组织
1、ARM寄存器组成概述
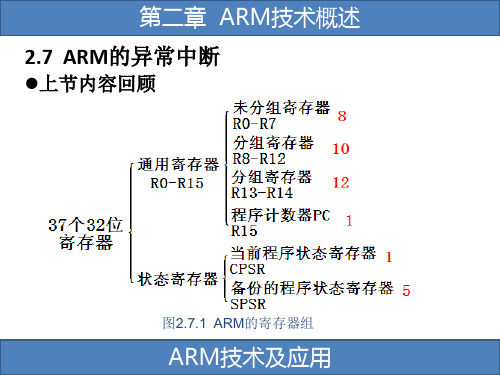
ARM处理器总共有37个寄存器,可以分为以下两类 寄存器 :31个通用寄存器 R0~R15 R13_svc、R14_svc R13_abt、R14_abt R13_und、R14_und R13_irq、R14_irq R8_fiq ~ R14_fiq 6个状态寄存器 CPSR、SPSR_svc、SPSR_abt、SPSR_und、 SPSR_irq和SPSR_fiq
第2章 ARM微处理器概述
工业控制领域:
作为32位 的RISC 架构,基于ARM 核的微控制器芯片不
但占据了高端微控制器市场的大部分市场份额,同时也 逐渐向低端微控制器应用领域扩展,ARM 微控制器的低 功耗、高性价比,向传统的8 位/16 位微控制器提出了挑 战。
无线通讯领域:
目前已有超过85%的无线通讯设备采用了ARM 技术,
ARM体系结构的变种
(4)J变种(Java加速器Jazelle)
ARM的Jazelle技术将Java的优势和先进的32位RISC芯
片完美地结合在一起。Jazelle技术提供了Java加速功能, 可以得到比普通Java虚拟机高得多的性能。与普通的 Java虚拟机相比,Jazelle使Java代码运行速度提高了8 倍,而功耗降低了80%。 Jazelle技术使得程序员可以在一个独立的处理器上同时 运行Java应用程序、已经建立好的操作系统、中间件以 及其他的应用程序。与使用协处理器和双处理器相比, 使用单独的处理器可以在提供高性能的同时保证低功耗 和低成本。 J变种首先在ARM体系版本4TEJ中使用,用字母J表示。
使用电池供电的高性能的便携式设备。这些 设备一方面需要处理器提供高性能,另一方 面又需要功耗很低。SIMD功能扩展为包括音 频/视频处理在内的应用相同提供了优化功能。 它可以使音频/视频处理性能提高4倍。 Version 6首先在2002年春季发布的ARM11 处理器中使用。
2.2.3 ARM体系结构的变种及版本 命名格式
Version 4(v4)
该版本增加了下列指令:
半字加载和存储指令; 加载带符号的字节和半字数据的指令; 增加mb状态; 增加了处理器的特权模式。 该版本不再强制要求与以前的26位地址空间 兼容。
ARM体系架构

该例中用6个时钟周期执行了6条指令 所有的操作都在寄存器中(单周期执行) 指令周期数 (CPI) = 1
高速缓存(CACHE)
1、为什么采用高速缓存 微处理器的时钟频率比内存速度提高快得多,高速缓存可以提 高内存的平均性能。
2、高速缓存的工作原理 高速缓存是一种小型、快速的存储器,它保存部分主存内容的
拷贝。
高 数据
速
CACHE
CPU
缓 存
主存
控
制
地址
器
数据
总线和总线桥
CPU
高速总线
低速设备
低速总线
软硬功能分配 复杂指令增加硬件的复杂度,使指令执行周期大大加长 ,直接访存次数增多,数据重复利用率低。
不利于先进指令级并行技术的采用 流水线技术
RISC基本设计思想
精简指令集:保留最基本的,去掉复杂、使用频度不高的指令 (选取运算指令、加载、存储指令和转移指令作主指令集) ,以减小CPI: CPUtime=Instr_Count * CPI * Clock_cycle
CISC的主要缺点
指令使用频度不均衡。 高频度使用的指令占据了绝大部分的执行时间,扩充的 复杂指令往往是低频度指令。
大量复杂指令的控制逻辑不规整,不适于VLSI工艺 VLSI的出现,使单芯片处理机希望采用规整的硬联逻辑 实现,而不希望用微程序,因为微程序的使用反而制约 了速度提高。(微码的存控速度比CPU慢5-10倍)。
IC—程序中指令数,CPI—每条指令执行所有周期数
ARM入门教程.pdf

目录第1章 ARM微处理器概述 51.1 ARM-Advanced RISC Machines 51.2 ARM微处理器的应用领域及特点 51.2.1 ARM微处理器的应用领域 51.2.2 ARM微处理器的特点 61.3 ARM微处理器系列 61.3.1 ARM7微处理器系列 61.3.2 ARM9微处理器系列 71.3.3 ARM9E微处理器系列 71.3.4 ARM10E微处理器系列 71.3.5 SecurCore微处理器系列 81.3.6 StrongARM微处理器系列 81.3.7 Xscale处理器 81.4 ARM微处理器结构 81.4.1 RISC体系结构 81.4.2 ARM微处理器的寄存器结构 91.4.3 ARM微处理器的指令结构 91.5 ARM微处理器的应用选型 101.6 本章小节10第2章 ARM微处理器的编程模型 112.1 ARM微处理器的工作状态 112.2 ARM体系结构的存储器格式 112.3 指令长度及数据类型 122.4 处理器模式 122.5 寄存器组织 132.5.1 ARM状态下的寄存器组织 132.5.2 Thumb状态下的寄存器组织 152.5.3 程序状态寄存器 162.6 异常(Exceptions) 182.6.1 ARM体系结构所支持的异常类型 182.6.2 对异常的响应 182.6.3 从异常返回 192.6.4 各类异常的具体描述 192.6.5 异常进入/退出小节 202.6.6 异常向量(Exception Vectors) 202.6.7 异常优先级(Exception Priorities) 212.6.8 应用程序中的异常处理 212.7 本章小节21第3章 ARM微处理器的指令系统 223.1 ARM微处理器的指令集概述 223.1.1 ARM微处理器的指令的分类与格式 223.1.2 指令的条件域 233.2 ARM指令的寻址方式 233.2.1 立即寻址 243.2.2 寄存器寻址 243.2.2 寄存器间接寻址 243.2.3 基址变址寻址 243.2.4 多寄存器寻址 253.2.5 相对寻址 253.2.6 堆栈寻址 253.3 ARM指令集 253.3.1 跳转指令 253.3.2 数据处理指令 263.3.3 乘法指令与乘加指令 303.3.4 程序状态寄存器访问指令 323.3.5 加载/存储指令 323.3.6 批量数据加载/存储指令 343.3.7 数据交换指令 353.3.8 移位指令(操作) 353.3.9 协处理器指令 363.3.10 异常产生指令 383.4 Thumb指令及应用 383.5 本章小节39第4章 ARM程序设计基础 404.1 ARM汇编器所支持的伪指令 404.1.1 符号定义(Symbol Definition)伪指令 404.1.2 数据定义(Data Definition)伪指令 414.1.3 汇编控制(Assembly Control)伪指令 434.1.4 其他常用的伪指令 454.2 汇编语言的语句格式 484.2.1 在汇编语言程序中常用的符号 494.2.2 汇编语言程序中的表达式和运算符 494.3 汇编语言的程序结构 524.3.1 汇编语言的程序结构 524.3.2 汇编语言的子程序调用 524.3.3 汇编语言程序示例 534.3.4 汇编语言与C/C++的混合编程 554.4 本章小节56第5章应用系统设计与调试 575.1 系统设计概述 575.2 S3C4510B概述 585.2.1 S3C4510B及片内外围简介 585.2.2 S3C4510B的引脚分布及信号描述 615.2.3 CPU内核概述及特殊功能寄存器(Special Registers) 675.2.4 S3C4510B的系统管理器(System Manager) 725.3 系统的硬件选型与单元电路设计 825.3.1 S3C4510B芯片及引脚分析 825.3.2 电源电路 835.3.3 晶振电路与复位电路 835.3.4 Flash存储器接口电路 855.3.5 SDRAM接口电路 895.3.6 串行接口电路 935.3.7 IIC接口电路 945.3.8 JTAG接口电路 955.3.9 10M/100M以太网接口电路 965.3.10 通用I/O接口电路 1005.4 硬件系统的调试 1015.4.1 电源、晶振及复位电路 1015.4.2 S3C4510B及JTAG接口电路 1025.4.3 SDRAM接口电路的调试 1035.4.4 Flash接口电路的调试 1055.4.5 10M/100M以太网接口电路 1055.5 印刷电路板的设计注意事项 1055.5.1 电源质量与分配 1055.5.2 同类型信号线的分布 1065.6 本章小节 106 第6章部件工作原理与编程示例 1076.1 嵌入式系统的程序设计方法 1076.2 部件工作原理与编程示例 1086.2.1 通用I/O口工作原理与编程示例 1086.2.2 串行通讯工作原理与编程示例 1116.2.3 中断控制器工作原理与编程示例 1206.2.4 定时器工作原理与编程示例 1236.2.5 GDMA工作原理与编程示例 1276.2.6 IIC总线控制器工作原理 1336.2.7 以太网控制器工作原理 138主要特性139MAC功能模块 140 带缓冲DMA接口(Buffered DMA Interface) 144以太网控制器特殊功能寄存器(Ethernet Controller Special Registers) 147MAC寄存器(Media Access Control(MAC)Register) 154以太网控制器的操作(Ethernet Controller Operation) 160发送一个帧(Transmitting a Frame) 162接收一个帧(Receiving a Frame) 1626.2.8 Flash存储器工作原理与编程示例 1626.3 BootLoader简介 1676.4 本章小节 167 第7章嵌入式uClinux及其应用开发 1687.1 嵌入式uClinux系统概况 1687.2 开发工具GNU的使用 1707.2.1 GCC编译器 1707.2.2 GNU Make 1727.2.3 使用GDB调试程序 1777.3 建立uClinux开发环境 1807.3.1 建立交叉编译器 1817.3.2 uClinux针对硬件的改动 1847.3.3 编译uClinux内核 1857.3.4 内核的加载运行 1877.4 在uClinux下开发应用程序 1887.4.1 串行通信 1907.4.2 socket编程 1957.4 .3 添加用户应用程序到uClinux 2027.4.4 通过网络添加应用程序到目标系统 2057.5 本章小结 207 第8章ARM ADS集成开发环境的使用 2098.1 ADS集成开发环境组成介绍 2098.1.1 命令行开发工具 2098.1.2 ARM运行时库 2188.1.3 GUI开发环境(Code Warrior和AXD) 2198.1.4 实用程序 2218.1.5 支持的软件 2218.2 使用ADS创建工程 2228.2.1 建立一个工程 2228.2.2 编译和链接工程 2258.2.3 使用命令行工具编译应用程序 2298.3 用AXD进行代码调试 2308.4 本章小结 233第1章 ARM微处理器概述本章简介ARM微处理器的一些基本概念、应用领域及特点,引导读者进入ARM技术的殿堂。
ARM的异常和中断
指令预取中止 0x0000000c 数据访问中止 0x00000010 外部中断 快速中断 0x00000018 0x0000001c
ARM技术及应用
第二章 ARM技术概述
2.7.3 ARM的异常中断向量表 异常中断向量表的大小为32字节; 每个异常中断向量占4个字节,存放一个跳转指令 或向PC寄存器中赋值的数据访问指令; 异常中断响应时,程序计数器PC会指向相应的异常 中断向量,执行跳转指令跳转至相应的异常中断服务 程序中继续执行。
Uboot:免费开源的BootLoader,支持多种处理器 本例Uboot版本: 1.3.2 本例代码:/uboot-1.3.2/cpu/arm920t目录下的start.S ,是系统在Uboot引导下执行的第一段代 Uboot 码。
ARM技术及应用
第二章 ARM技术概述
代码片段分析:
.globl _start _start: b start_code ldr pc, _undefined_instruction ……………….. ldr pc, _irq ldr pc, _fiq _undefined_instruction: .word undefined_instruction ……………………….. __irq: .word irq _fiq: .word fiq
ARM技术及应用
第二章 ARM技术概述
2.7.4 ARM的异常中断响应过程
图2.7.3 异常中断响应过程
ARM技术及应用
第二章 ARM技术概述
2.7.5 ARM的异常中断的返回 复位异常处理程序执行完毕后,不用返回。
图2.7.4 异常中断的返回
ARM技术及应用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章 ARM技术概述
2.RISC
80年,全面提出RISC的设计思想
《精简指令集计算机概述》 精简指令集计算机概述》
80初期,给予RISC有力的支持
RISC处理器原型机的优良性能 处理器原型机的优良性能
80中期,一些公司采用RISC体系结构
最成功当属ARM系列处理器 系列处理器 最成功当属
第2章 ARM技术概述
• 优点: 优点:
处理器管芯面积小 开发时间短成本低 容易实现高性能 代码密度低 不能执行x86代码 给优化编译程序带来困难
• 缺点: 缺点:
第2章 ARM技术概述
ARM组织结构简介 2.2 ARM组织结构简介
2.2.1三级流水线 三级流水线ARM的组织 三级流水线 的组织 (及冯诺曼结构) 2.2.2五级流水线 五级流水线ARM的组织 五级流水线 的组织 (及哈佛结构)
第2章 ARM技术概述
2.2.1三级流水线ARM的组织
1)ARM的3级流水线介绍 ) 的 级流水线介绍
到ARM7为止的ARM处理器使用的简单 3级流水线分别为 取指级 (fetch) 译码级 (decode) 执行级 (execute)
第2章 ARM技术概述
ARM单周期指令的3级流水线操作 1 fetch1 decode1 execute1 fetch4 decode4 2 3 fetch3 decode3 execute3 时间 fetch2 decode2 execute2 fetch5
2.1ARM体系结构的发展历史 2.1ARM体系结构的发展历史
ARM发展的历程 2.1.1 ARM发展的历程 RISC体系结构 2.1.2 RISC体系结构
第2章 ARM技术概述
ARM发展的历程 2.1.1 ARM发展的历程
83年至85年第一片ARM处理器问世 85年,测试成功 90年,成立独立公司 ARM公司处于领先地位 ARM7核出现,被普遍认可和应用
第2章 ARM技术概述
第二章 ARM技术概述 技术概述
本章将对ARM技术进行全面论述,通过 本章的学习,使大家对ARM技术有比较全面 的了解和掌握。
第2章 ARM技术概述
本章的主要内容为:
2.1 ARM体系结构的发展历史 2.2 ARM组织结构简介 2.3 ARM片上总线AMBA
第2章 ARM技术概述
第2章 ARM技术概述
第2章 ARM技术概述
第2章 ARM技术概述
第2章 ARM技术概述
第2章 ARM技术概述
ARM多周期指令的3级流水线操作
第2章 ARM技术概述
三级流水线、 三级流水线、冯·诺曼结构的缺点 3级: 级 冯诺曼: 冯诺曼: 每级指令工作量不统一 指令和数据存储器没有分开
当执行多周期指令时,必然造成ARM 流水线间断。
第2章 ARM技术概述
பைடு நூலகம்
2)ARM 3级流水线下 的行为 ) 级流水线下PC的行为 级流水线下
在3级流水线的执行过程中,当通过R15寄存 器直接访问PC时,必须考虑到此时流水线的执行 过程的真实情况
三级流水线的PC行为
第2章 ARM技术概述
2.2.2五级流水线ARM的组织
第2章 ARM技术概述
ARM核/ CPU
片上 RAM
测试接口 控制 外部总线 接口 UART APB 定时器 并行接口
AHB或ASB DMA 控制器 桥路
AMBA总线的逻辑结构图
3级,40MHz,8KBCache 级 ,
第2章 ARM技术概述
95年,Strong ARM
5级,200MHz 级
96年,ARM8
5级,>70MHz 级
97年,XScale
7级,200~600MHz 级 1GHz
97年,ARM9
5级,>200MHz 级
ARM10
6级 级
01年,ARM11
8~9级,500~700MHz 级
使用5级流水线的ARM处理器包含下 面5个流水线级 取指 译码 执行 缓冲\数据 回写
第2章 ARM技术概述
3级、5级流水线比较
3级
5级
第2章 ARM技术概述
2.3 ARM片上总线AMBA ARM片上总线AMBA 片上总线
先进的微控制器总线体系结构 AMBA是ARM公司公布的总线标准 是 公司公布的总线标准
第2章 ARM技术概述
RISC体系结构 2.1.2 RISC体系结构
1.CISC 2.RISC
第2章 ARM技术概述
1.CISC
微处理发展 计算机体系结构的优化 制造工艺的发展
√
到20世纪70年代止,微处理的发展基本上 归功于第2点 此时,人们开始研究指令集合理化
第2章 ARM技术概述
发现: 发现: 20%~80% CISC指令长短不统一 软、硬件设计出现矛盾
AHB(Advanced High-performance Bus): 用于连接高性能系统模块。它支持突发数据 传输方式及单个数据传输方式,所有时序参 考同一个时钟沿。 ASB(Advanced System Bus):用于连接高 性能系统模块,它支持突发数据传输模式。 APB(Advance Peripheral Bus):是一个简单 接口支持低性能的外围接口。