基于CCD检测的循线移动智能汽车控制系统的研究与设计
基于线性CCD循迹的智能车系统设计
2
心距变化 率+ KA× 二 _, 其 中v为小车当前速度,
尺
参考文献
[ 1 】 邹淑彩 . 刷卡 式无人车在物料搬运 系统 中
的应用 … .航 空精密制造技术 , 2 0 1 4 . [ 2 ]郭佳 ,刘晓玉 ,昊冰 ,付 晓薇 .一种光 照
KI = 0 . 0 9 5 。 占空 比在 2 O % 的 情 况 下 , 智 能 车 能 以 2米 / 秒 的速 度 完 成 赛 道 。
移量转换成脉冲 或数 字量进 行输出,编码器 每 确的将 1 2 8个线性点 中间部分存在障碍物 的部
当赛道左 右边沿都 出现在线性 CC D采集 的图像中 ,即智能车行驶在直道上 ,直接通过 计算得到左右边沿 中间点作为赛道 中心线 。当 赛道左边 沿或右边 沿未能 出现在线性 CC D采 集的图像 中,即智能车处于弯道上 ,使用设置 好的赛道值分别对左、右边沿做加 、减运算得 到赛道中心线。当赛道左边沿和右边沿都未能
死。 确 定 要 给 的 转 角 公 式 为 G i v i n g a n g l e
=
减 速依赖于速度 闭环返 回的速度脉冲值的可靠 在 的少 数高电平置换成为低 电平,保证智能车 度和精确 度,因此为 了提高检测精 度选用精度 准确地扫 描到正确的图像。之后找出灰度值与
较 高的欧姆龙 5 0 0线光 电编码器。编码器安装
面 ,采用 s i m u l i n k 建模 ,这样 的仿真模 型可以
找到 P I D参数 K P、 K I 、 KD 的变 化 ,避 免 了 “ 黑
箱 ”调试参数的弊端 ,方便地 实现 、验证 和改 舵机控制采用 P D控制 ,增加 响应的快速 性及稳定 性,舵机 P WM 输 出占空 比= KP x偏 心距 + K Dx偏心距变化率 。通过对智能车系统 进行建模 ,将向心加速度的影响分量加入 ,最
毕业设计基于图像传感器的自动循迹智能车
系统软件流程图
软件的开发工具和系统的调试
• 1.CodewarriorV4.7软件及其应用 • Codewarrior软件是Metrowerks公司开发的软件集 成开发环境及IDE(intergrated develop inviroment),Freescale的单片机都可以在 codewarior IDE软件下进行开发,codewarrior IDE 为软件开发提供了一系列的工具
智能车系统的分析
• 1.系统模型总体框图
• 2.系统控制电源模块分析
• 3.系统软件模块的分析
• 从该结构图中可以看出,系统的软件模块主要有: • 1. 单片机系统的初始化,包括单片机系统时钟的初始化、 ATD模块的初始化、PWM模块的初始化、增强型时钟模 块的初始化,还有一些输入输出口的初始化; • 2. 图像信号的采集:通过对图像信号波形的学习,根据图 像信号的特点,采集有效图像信号; • 3. 图像信号的处理:将采集到的信号存储在单片机中,通 过对图像信号的分析和判断来识别路径,判断黑线中间位 置,判断道路是直线还是曲线,以及通过计算判断出曲线 的斜率,从而进一步的控制舵机的转角和驱动电机的转速。 • 4. 舵机转角的控制和电机转速的控制:通过控制PWM口 的信号输出可以实现对舵机转角和轮速的控制
研究课题:基于图像传感器的自 动循迹智能车系统设置
指导老师: 学生: 专业:车辆工程
智能车概述
• 智能车是一种轮式移动机器人,它能够自主进行路径识别、 决策规划以选择最佳的行驶状态,智能车集中运用了自动 控制、传感器技术、汽车电子、电气、计算机、机械等多 个学科的知识。随着控制技术、计算机技术和信息技术的 发展,智能车在工业生产和日常生活中已扮演了非常重要 的角色。车辆智能化是汽车工业今后的发展趋势,也是人 们对安全性、智能化要求越来越高未来汽车的发展方向。 随着计算机技术和信息技术为代表的高新技术的发展,智 能车辆技术的研究将会有突破性的进展。智能车辆系统的 实用化是智能车辆发展的前进方向,适应性强、环境适应 性好的智能车辆将是研究的重点。
基于CCD传感器智能寻迹模型车研究和实现
基于CCD传感器的智能寻迹模型车的研究与实现董长远长安大学汽车学院车辆工程系,陕西省西安市 710064摘要: 研究并实现了一种基于CCD传感器的智能寻迹模型车系统。
采用飞思卡尔公司HCS12 系列16位单片机MC9S12DG128作为核心控制单元,使用CCD 摄像头采集路面信息。
赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。
关键词:智能车;CCD传感器;路径识别;捷径Investigation & implementation of an intelligent-searching track car model based on CCD Image SensorDONG ChangYuanAutomobile School, CHANG-AN University, Xi’an City, Shanxi Province 710064,ChinaAbstract: An intelligent-searching track car model based on CCD image sensor is investigated and implemented. The intelligent car system, with Freescale HCS12 series 16 bit single-chip MC9S12DG128 as its control micro-processor, uses CCD camera to obtain lane image information.The main function that the intelligent car may achieve is that the car should track the black-guide-line automatically and move forward following the line as fast and stable as possible.Key words: intelligent car;CCD Image Sensor;lane detection;royal road1.引言车辆和我们的社会生活息息相关,然而当今车辆的智能化发展还不是很迅速,特别是在安全性,智能性,车与路之间交互信息等方面.当今的车辆技术与未来的智能车辆技术还存在着巨大的差距。
基于线性CCD的智能循迹小车设计

基于线性CCD的智能循迹小车设计作者:雷永锋刘勇黄喜恒来源:《科技视界》2014年第21期【摘要】本文针对线性CCD的工作特点,利用TSL1401-DK线性CCD作为传感器采集赛道信息,将路况信息传送给MC9S12XS128单片机,由单片机通过PID算法控制舵机的转角和电机的转速,实现了智能小车自动巡线的要求。
经过系统硬件电路搭建和软件程序编写,能够实现小车快速直行及循迹转弯等功能。
【关键词】线性CCD;智能小车;循迹;控制系统0 引言随着科技的进步和高等教育的发展,培养应用型人才成为高校人才培养的主要目标。
让在校大学生参与更多的实践活动不但能够增加动手和思考的能力,而且对于适应毕业后的工作有很大的益处。
全国大学生智能汽车竞赛就为在校学生提供了一个展示自己的平台,也促进了专业理论知识和实践能力的结合。
本论文设计的基于线性CCD的智能巡线小车控制系统就是利用学院大学生科技创新基金针对竞赛而开展的一项创新项目。
由于线性CCD的优良特性,使得在小车控制方面得到较好的应用,实现小车平稳、快速的行走。
1 系统总体设计本智能循迹小车由电源模块、单片机模块、舵机模块、线性CCD图像采集模块、显示和按键、无线通讯模块等模块组成,系统硬件结构框图如图1所示。
2 系统硬件设计本系统采用线性CCD作为传感器,采集来自前方赛道的信息,并将此信息处理后传送至单片机,通过软件处理,由舵机调整角度,驱动电机带动车轮行走。
单片机通过串口通讯模块实现和上位机之间的通讯,由按键实现现场参数调整,并可通过LCD实时显示运行参数。
下面对系统主要硬件模块进行阐述。
2.1 单片机控制模块本系统采用Freescal半导体公司生产的16位单片机MC9S12XS128作为控制器。
MC9S12XS128是一款针对汽车电子市场的高性能16位单片机,具有速度快、功能强、成本低、功耗低等特点。
MC9S12XS128总线速度40MHz,拥有128KB程序Flash和8KB DataFlash,用于实现程序和数据存储,均带有错误校正码(ECC),可配置8位、10位或12位ADC,3μs的转换时间,内嵌MSCAN模块用于CAN节点应用。
基于CCD传感器在智能汽车中的应用分析
基于 CCD传感器在智能汽车中的应用分析摘要:当前,汽车厂商数量越来越多,市场竞争愈发激烈,各汽车厂家为提升产品竞争力,提升自身市场发展潜力,也在不断寻找更为科学的车用传感器应用与发展模式,汽车智能化已成为市场的普遍趋势,而传感器更是汽车实现智能化的根本。
基于此,本文就CCD传感器在智能汽车中的应用进行简要分析。
关键词:CCD传感器;智能汽车;应用;1 CCD传感器原理及在汽车电子技术中发挥的作用1.1 CCD 传感器的工作原理CCD 图像传感器可以感知光线,将其转变为信号电荷,而信号电荷是可以存储以及读取的。
由此可见,CCD 图像传感器可以作为智能汽车循迹系统中的重要组成部分使用,其主要功能为:根据 CCD 图像传感器储存的有图像转换而来的数字信号进行分析,帮助智能汽车能够按照规定的路线行驶。
CCD 图像传感器通过将光反射的图像信号转变为信号电荷,以此来完成光电的转换,因此,CCD 图像传感器的精度和灵敏度直接决定了智能汽车控制系统反应的精度以及灵敏度。
1.2 CCD传感器在汽车电子技术中发挥的作用CCD传感器是现代汽车电子技术的基础环节,传感器的存在让汽车自动化、智能化控制成为可能,对提升汽车电子技术的水平有着积极的影响。
现阶段,行业工作者将汽车控制系统称之为闭环控制系统,而这一系统需实时搜集汽车运行的各类数据信号,只有保证这些数据信息的精准度与实时性,才能让汽车控制与运行更为安全可靠。
传感器可实时监控汽车各项性能参数,为闭环控制系统实时提供各项反馈信号,同时,亦可将与汽车安全运行相关的温度、压力、声音以及光等非常规信号转变为可被闭环控制系统有效识别的电信号,并可将这些数据信息在统一的逻辑下完成处理,最终实现汽车智能化控制。
因此,对于现代汽车而言,传感器就是保证汽车持续稳定运行的根本,如果失去传感器,汽车电子技术对于汽车行业的价值将无从谈起。
对于行业工作者而言,为推动汽车电子技术自身价值与优势的提升,应合理运用各类传感器,并找到更为合适的应用策略,在汽车电子技术中合理运用传感器。
基于线性CCD追逐智能车系统的硬件设计
1 引言智能循迹小车涵盖机械、电子、电气、单片机、控制等多学科领域,是一个集环境感知、规划决策、自动行驶等功能于一体的综合系统,是高新技术的综合体。
目前,企业生产技术不断提高,对自动化技术要求不断提高,智能车以及在智能车基础上开发出来的产品成为自动化物流运输设备的关键,因此智能车的设计具有很强的实际意义。
本文以“恩智浦”杯智能车竞赛为背景,重点介绍线性CCD 追逐智能车系统的机械结构和硬件设计,结合相应的程序算法,经过不断改进、调试与优化,追逐智能车的行驶速度和稳定性得到明显的提高。
2 线性CCD 追逐智能车系统的整体结构线性CCD 追逐智能车系统分为7大模块:主控制器模块、电源模块、赛道信息采集模块、方向控制模块、速度控制电路模块、双车距离控制模块和停车线识别控制基于线性CCD 追逐智能车系统的硬件设计湖北师范大学机电与控制工程学院 张文财 叶梦君 黄仰来 雷改惠摘 要本文介绍以MK60DN512ZVLQ10单片机为微控制器,线性CCD 采集赛道信息的追逐智能车系统的硬件设计。
基于线性CCD 追逐智能车系统的硬件设计,详细描述了主控制器模块、电源电路模块、赛道信息采集模块、方向控制模块、速度控制电路模块、停车线识别模块和双车距离控制模块的设计。
通过测试,最终实现光电双车快速直行及循迹转弯等功能。
关键词MK60DN512ZVLQ10;线性CCD ;追逐模块,线性CCD 追逐智能车系统硬件整体设计框图如图1所示。
主控制器模块由K60最小系统板构成,是整个追逐智能车的大脑,完成整个智能车的各项任务的分配和执行[1]。
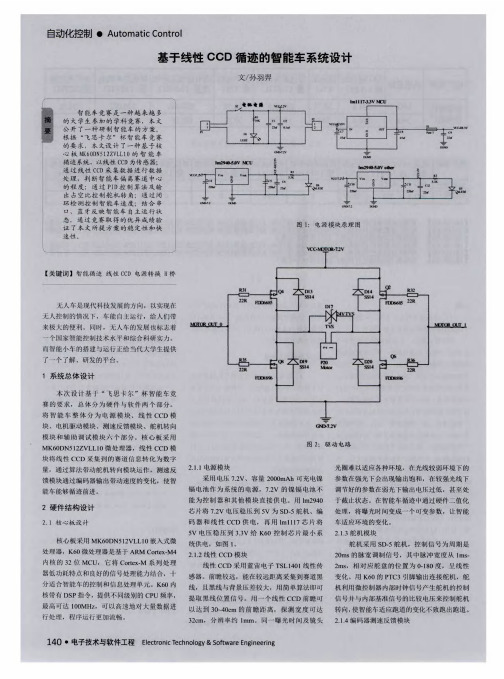
电源模块负责给其它各电路模块提供不同的电压,其中主控芯片MK60DN512ZVLQ10需要3.3V 电压;赛道信息采集模块中的TSL1401线性CCD 供电电压为5V ;方向控制模块中的FutabaS3010舵机供电电压为6V ;速度控制模块中的电机驱动电路需要7.2V 电压,驱动芯片74HC244需要5V 电压,测速编码器E6A2-CW3C 需要5V 供电;双车距离控制模块超声波需要5V 电压;停车线识别模块需要5V 电压。
基于线性CCD循迹智能车的设计与实现

基于线性CCD循迹智能车的设计与实现黄锦阳;胡傲;秦浩杰;赵春锋【摘要】所设计的智能车系统采用恩智浦公司的32位微控制器MK60DN512VLL10为核心控制单元,基于CCD摄像头的图像采样获取车道的图像信息,提取车道中心线,从而计算出小车与车道边界线间的位置偏差,采用PD方式对舵机转向进行反馈控制,采用PID的方式控制电机的转速,再结合特定算法分析前方车道信息,完成对智能小车速度的闭环控制.通过对整体方案、硬件、算法等方面的介绍,阐述该智能车设计中的思想和创新.【期刊名称】《现代计算机(专业版)》【年(卷),期】2018(000)021【总页数】4页(P77-80)【关键词】K60;线性CCD;二值化;PID控制【作者】黄锦阳;胡傲;秦浩杰;赵春锋【作者单位】上海工程技术大学工程实训中心,上海 201620;上海工程技术大学工程实训中心,上海 201620;上海工程技术大学工程实训中心,上海 201620;上海工程技术大学工程实训中心,上海 201620【正文语种】中文0 引言随着科学技术水平和生产力发展水平的提高,人们越来越追求智能化,而交通工具对未来社会的发展起着举足轻重的作用,智能汽车则是最重要的一个环节。
智能小车系统是智能汽车的一个缩影,两者在信息获取、信息处理、控制系统构成以及车辆整体设计方案方面有着许多相似之处。
因此,研究智能小车的必要性显而易见。
智能小车主要由核心控制模块、电源管理模块、路径识别模块、车速测定模块、电机驱动模块、舵机等组成。
本文主要研究在使用线性CCD的基础上,由单片机控制自主循迹的智能车。
智能车的主控制器为K60单片机,设计智能车各个模块单元的控制,以实现智能车在无人操作下智能循迹,实现自动驾驶。
1 系统整体设计智能车系统的基本结构可以分为三部分组成:传感器、控制器和执行器。
智能小车是以检测车道两边黑线为基础,通过单片机处理信号从而实现对车体能够自主沿着预设的道路路径智能行驶。
基于CCD摄像头的智能车系统设计

基于CCD摄像头的智能车系统设计摘要随着电子技术与智能控制的发展,智能车的已经成为自动控制领域内的一个研究热点。
第一章绪论1.1研究背景1.1.1 智能车的发展历程智能车的发展是从自动导引车(Automatic Guided Vehicle,AGV)起步的。
AGV是指装有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护及各种移栽功能的运输车辆。
1913年,美国福特汽车公司首次将有轨导引的AGV代替输送机用到底盘装配上。
1953年,美国Barrett Electric公司制造了世界上第1台采用埋线电磁感应方式跟踪路径的自动导向车,也被称作“无人驾驶牵引车”。
20世纪60年代和70年代初,AGV仍采用这种导向方式。
在20世纪70年代和80年代初,AGV的应用领域扩大而且工作条件也变得多样化,因此,新的导向方式和技术得到了更广泛的研究与开发。
随着电子和计算机技术的发展,视觉导航和激光导航成为了热门的研究方向。
由此出现了智能车的概念。
从1987年到1994年,在欧洲展开可“普罗米修斯” (Prometheus Program for the European traffic of highest efficiency and unprecedented safety)EUREKA项目。
该项目中颇具代表性的是戴姆勒——奔驰公司研制的VITAⅡ试验车,于1994年10月在巴黎附近的一条告诉公路上进行了车辆导航试验,在长达几千公里的普通三车道路段中采用了驾驶员辅助驾驶和车辆自主驾驶相结合的导航方法。
德国联邦大学(UBM),从20世纪80年代初期就开始了智能车辆自主导航研究,其合作伙伴是德国戴姆勒—奔驰汽车公司。
其中最具代表性的是一辆由豪华型本车500SEL改装成的VaSoRs-P试验车。
VaSoRs-P 试验车在高速公路和普通公路上进行了大量的试验,试验内容包括跟踪车道线,躲避障碍以及自动超车等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A D 和 A D 两组 , T0 T1 为保证 A D转换 的精度 , 给该模块加 / 要
采用 70 ,86和一块 V 1 8 570 S 开关 型 D C—D C升压集成 电路 实 现, 驱动电机 芯片直接 用 7 2V电池供电。 . 12主控制器简介 .
差控 制等 主要控制功能提 出了 图1 智 能 汽 车控 制 系统 示 意 图 解决 方案 。如 图 1 所示 。
中保持 一 定 的 稳 定性 和平 顺 性, 控制 系统 中对 导 引线 路径
信息识别 、 径定 位 与方 向偏 路
梯 形 视 野 区 域
电源模块 为系统其 他各 电路 运行 提供 合适 的 电压。车
载主 电源为 1 7 2V, h可充电镍镉蓄电池。 由于主控 块 . 2A/
制器 、 机 、 舵 摄像头分别需要 5 6V 1 V等 电压供 电, 别 、 V、 2 分
径识别电路、 电机驱动电路、 车速传感电路、 舵机驱动电路。采用边缘提取算法提取 出路径信息 , 调试后最终完成 了偏重于行驶稳
定的理 想车模 , 实现 ቤተ መጻሕፍቲ ባይዱ小车 沿黑 线稳 定快速 的 前进 。
关 键词 : 智能 汽车 路径 识 别 图像 采集 边缘提 取
中图分 类号 :P7 T 24
J AO n i I Xixn,W ANG ih i M n u
Ab tac :A mat c ro ut—r c ig b s d o sr t s r a fa o ta kn a e n CCD mea dee to s ito u e . Mo e a n Ca r tc in wa nr d c d d lc ra d MC9 2 S1 XS1 8 we e a ptd 2 r do e . Cic t o uo ma t d n i c to rui fra t si ie tf a in,moo rv s c i trd e,s e d snsr,s r od ie wee d sg d a d prd c d.Afe e ae x ei n so h i p e e o e v rv r e ine n o u e trrpe td e p rme t n te a ta H wa cu lr n y,t e me d d a d i r v d,te a s mbld mo e a c mp a ie n sa l yfn lyc mpltda d c ud r n ao g te h n a n e n mp o e h se e d lc rwhih e h szd o tbit al o i i ee n o l u n h l blc ie sa l nd fs. a k ln tb y a a t Ke y wor s:ma tc ;u o tc ie tf ain;ma e s mpi g;dg —ec n d s r a a tmai d nii t r c o i g a ln e e fthig
文献标 识码 : A
文章 编号 :02— 862 1 }3- 03— 4 10 68 (00 0 05 0
Re e r h a d De i n o t -r c i g S s a c n sg f Au o t a k n ma tCa n r lS s e s d o r r Co t o y tm Ba e n CCD a r C me a
l 智 能车控 制 系统硬 件 结构 与设计 方案
智能车控制系统设计为 : 电源管 理模块 为其 他模块 提供
MC S2 S 2 9 1X 18单片机 的片 内存 储器 有 18 的 F A H, 2K LS 1K的 R 2 AM,K的 E P O 4 E R M。主要有 电压 调整模块 、 在线调
以电动模 型车为研究对 象 , 通过车载 C D摄像头动态摄取 路 C 面图像 , 识别 白色场地 中的任意黑色带状 导引线 , 控制电动小
车 以设定速度 沿导 引线 自动行
图2 系统结构框图
沿着 路线稳定 快速 的行驶 。 1 1电源管理模块 .
驶, 为使 电动小 车在 行驶 过程
O 引言
汽车智能化相关 的技术 问题 已受到 汽车制 造商 们 的高 度重视 , 其主要技术 中具 有 自动控 制车速 、 自主寻 路 、 自动导 航、 主动避撞 、 自动 电子 收费 、 人驾 驶等 功能 的“自动驾 驶 无 仪” 的构想必将依赖于电子技术实 现。智能汽 车是今后 国 内
试 模 块 、 钟 产 生 模 块 , 时模 块 、/ 转 换模 块 、WM 模 块 、 时 定 AD P
合适 的电压 , 由安装在智能 车前端 的摄像头拍摄 车体 前方道
C N模块 组 成。 1 A 6路 1 0位 精 度 的 A D转 换 模 块 , 为 / 分
路, 从拍摄 的道路 图片 中提取黑色引导线信息送到智能车 1 6
外汽车发展的热点领域 , 未来汽 车发展 的必然趋势 。本 文 是
位 的控 制 器 处 理 器
MC S 2 S2 , 断 9 1X 18 判
车身相对前方引导线 位置 , 再结 合 速 度 传
感 器 获 取 的 当前 速
度 , 据算 法 对 舵 机 根
转向和驱动电机转 速 进行 调整 , 智 能 车 使
・
53 -
基于 C D检测的循线移动智能汽车控制系统的研究与设计 木 C
焦 欣欣 , 民慧 王
( 州 大学 电 气工程 学 院 , 州 贵 阳 500 ) 贵 贵 50 3 摘 要 : 文介 绍 了一种 基 于 C D摄像 头循 迹 的智 能汽 车的 方案 , 用标 准 的 车模 和 M 9 1X 18单 片机 , 本 C 采 C S2 S2 自行 设 计 和制 作 了路