robcad安装过程
【ROBCAD学习】robcad_最基本的操作过程
最基本的操作过程Robcad通常要创建两个文件夹,一个为Library;一个为Project。
Library一般存放固定的、不可更改的文件,比如:机器人,车型,测点,围栏,工装,水泥台等等。
Project一般存放的都是Library里的,在Robcad里可以被更改的文件。
Project里的文件可以更改过后,再放回Library文件里当库文件。
注:两个文件夹(包括两个文件夹)下的所有文件名必须是英文,中文不识别。
还有就是创建一个项目的时候最好是在Simulation文件夹下如:Simulation\jin\project或Simulation\jin\library。
以下是本行业使用Robcad的过程:1:打开软件在Robcad界面下,点击Setup,弹出Setup窗口→点击Project→Define→在Project name:填写项目名称→在Path:项目所在的Project的路径→点击Accept确认。
(这一步叫做“定义路径”)→点击Set library root(创建库的根目录)→删掉Filter,selection两栏中的内容,在Directories栏中找到项目的1Library路径,点击Filter键并确认。
创建好之后,点击Configuration→Store→User Project (保存)。
2:在Robcad界面下,点击Project→找到项目名称并点击进入。
弹出Layout窗口,点击Store as(另存) →在弹出窗口里填写另存名(这个时候Project文件下会出现-另存名的文件夹)。
在Layout窗口下点击Get component(获得组件),然后在Get component找出需要使用的诸如车型,机器人等等的组件。
将不需要的项目去掉,在Robcad界面下点击Setup→弹出Setup窗口→点击Projects→再点击Cancel选择要去掉的项目。
Sensor的安装方法(机器人关联Sensor)1.将传感器安装到机器人上在robcad界面下,点击上方工具栏中按钮Robcad,出现下拉菜单选择Workcell,在右下方出现工具框,选择Motion按钮,出2现Motion对话框,选择setting。
Robcad导入组件和装配
首先定义project和library文件夹
然后导入机器人
导入组件
点击get component,弹出左边窗口。 找出所要导入的组件文件,可在预览窗口查看。 按ok导入。
定义导入成功后,并用Placement调整位置
右键鼠标点击Display all,显示所有坐标,后面用到。
点击后下角的 motion按钮, 弹出右边窗口。
以Attach为例装配一组管线。
导入所需组件
通过XYZ移动把管线移动到目标位置。
在layout菜单里,选择Attach。弹出右边对话框。选鼠标点击要装配的组件(可多选), 然后把光标移动到Attach to:的选项,再用鼠标点击机器人任何位置,自动填充机器人 名字。按Accept确认操作,组件装配上。
装配成功!
关于组件的装配方法: 1.Mount,一般用于焊枪的粘结,工具带有自主运动性。而且此命令是坐标系对坐 标系的直接粘结,工具会自动准确装上.
2.Attach,通过移动组件到指定位置,建立和主体的连接关系的命令。 分one way,单向粘结,主随关系,组件随主体运动。 two way,双向粘结,对等关系,一齐双向运动。 3.Group,这个命令其实不算做装配,只是把组件移动到指定位置,然后编成一整 个模块移动。
首先定义project和library文件夹
点击Active mech,弹出窗口。 然后点击一下机器人,会自动填充机器人名字确认。
开始装配工具
鼠标点击Mo后点击一下工具上的要装配的坐标系,最后点击机器 人上装配位置的坐标系。按Accept,工具会自动粘合上去机器人。
robcad学习手册、资料、讲解
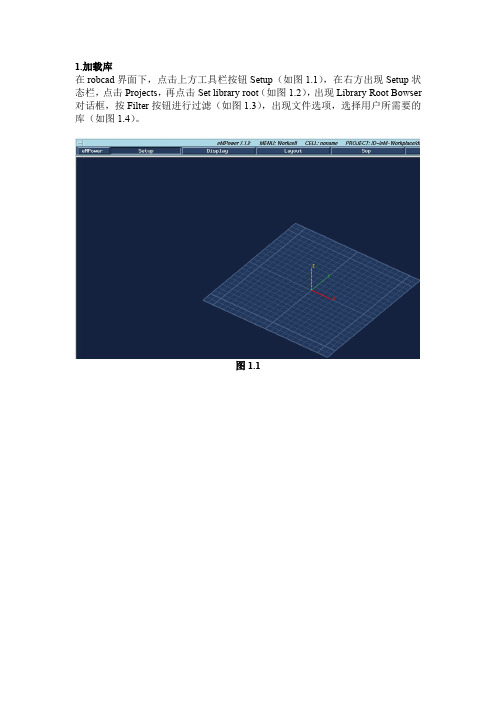
1.加载库在robcad界面下,点击上方工具栏按钮Setup(如图1.1),在右方出现Setup状态栏,点击Projects,再点击Set library root(如图1.2),出现Library Root Bowser 对话框,按Filter按钮进行过滤(如图1.3),出现文件选项,选择用户所需要的库(如图1.4)。
图1.1图1.2图1.3图1.42.加载车模在robcad界面下,点击上方工具栏按钮eMpower,出现下拉菜单选择Workcell (如图2.1)或者点击工具栏中按钮Layout(如图2.2),在右方出现Layout状态栏,点击Load cell(如图2.3),出现Load Cell对话框,选择用户所需要的车模(如图2.4)。
注:有时Cells框中无选项出现,按Thumbnails。
,出现选择对话框,选择用户所需要的车模(如图2.5)。
图2.1图2.2图2.3.图2.4图2.53.在画面中加入机器人在robcad界面下,点击上方工具栏按钮Layout(如图3.1),在右方出现Layou 状态栏,点击Get component(如图3.2),出现Get Component对话框,选择Libraries,选择用户所需要的机器人,Locate At:选择机器人位置,Instance Name:输入机器人名字(如图3.3)。
点击Locate At后的Position,出现Position对话框,点击Values,输入机器人所在位置的数据(如图3.4)。
图3.1图3.2图3.3图3.44.画面操作在robcad界面下,滚动鼠标中键滚轴拉远近视距,按住鼠标右键拖动进行画面的平移,同时按住鼠标中键+右键拖动进行画面的翻转。
5.控制机器人的运动在robcad界面下,点击上方工具栏中按钮eMpower,出现下拉菜单选择Workcell (如图5.1),在右下方出现工具框,选择Motion按钮(如图5.2),出现Motion 对话框(如图5.3),可按不同的坐标对机器人进行运动控制,点击Active mech,出现Mechanisms对话框(如图5.4),可选择机器人,点击编号或直接从界面中选择机器人。
Robcad学习教程(编者:温乃年)

1
2
4
3
2020/2/23
5
26
定义焊枪(1)
定义焊枪:(1)加载焊枪:将焊枪的CATIA数据导成Robcad的CO文件后,放至library
文件夹内。打开新Robcad后点Robcad内的Project 内的① Browse Project Tree后选择焊枪 co文件所在的文件后确定。然后再点击②Modeling后点击③Open后,选择所要定义的焊枪 后确定。
2 3
1
2020/2/23
27
定义焊枪(2)
定义焊枪:(2)定义焊枪动臂与不动臂:焊枪载入后点① Kinematics内的②Create
后在③Entities处先选择不动臂部分之后再选择动臂部分,按F9确定时选择④all。
1 2
3
4
2020/2/23
28
定义焊枪(3)
定义焊枪:(3)定义焊枪轴线:首先点① 2D Sketcher内选择②arc by three
1 2
4 5
3
2020/2/23
33
导出ROBCAD设备Layout
导出机器人等安装位置:打开ROBCAD后,点击ROBCAD内Modeling后,点击①Open后 在②Component处为最新平面布局图命名,然后点击③General Tools,再点击④Copy在 ⑤处选择机器人底座的安装位置面,然后再点击⑥Save保存,将会在project文件夹内自 动生成在②处所命名的co文件,之后可用ROBCAD将其转换成CAD文件。
points,在焊枪中轴处点3点后选择③Circle后确定成圆,然后再点④Point Center后选择先
Robcad_教程
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
24
目录
通用功能模块
1. Display模块: Viewing: ① View direction:以某实体为中心视角; ② View Points:创建某一视角; ③ Viewing panel:调整3D窗口亮度、地板大小和地板高度等; ④ Open graphics windows:同时打开多个3D窗口; ⑤ Cell view:保存窗口设置
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
15
目录
基本操作 2. 鼠标操作: 左键:选择功能; 中键:放大和缩小视角功能; 右键:现实对象的平移; 中键+右键:0~180度旋转; 3. 其他快捷键:见右图所示,在Setup 模块下的Hot key viewer中可以查看 其他快捷键的命令
F5:窗口设置
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
13
目录
基本操作 1. 键盘快捷键操作: F10:切换显示模式,按F10键,3D窗口中的资源会在“shaded”和“wireframe” 之间 切换; F11:选取模式切换,按F11键,选取模式会在“Snap”和“Where picked”之间切换;
选取对象
功能菜单
Transfer Panel
步进行程 绝对位置
相对移动
Robcad V9.0
北京迪基透科技有限公司
2015/10/20
18
目录
资源布局
1. Placement Editor命令: Xyz Shift:
在相应的方向输入距离即可完成移动。
robcad教学

1.工作路径设置完成后,将co数据copy到library文件夹中。
2.点击Workcell
3.点屏幕右侧的Get component。
4.在黄框中选择要读入的co文件,点ok即可导入。
屏幕操作
1. 屏幕移动:按住右键拖动。
2. 缩放: 按住中键左右拖动。向右方大,向左缩小。
3. 旋转视角:同时按住中键和右键拖动。
手动操作机器人运动
1.导入一个机器人co
2.点屏幕右下角的motion图标
3.点Active mech,选择要控制的机器人。可以在列表中选,也可直接点选模型
5.双击一个关节,按住鼠标中键左右拖动,机器人就可相应转动。
6.取消控制机器人可点击View小老鼠。
项目文件夹中必须包含project和library两个文件夹。
project文件夹存放ce数据;library文件夹存放co数据,但co数据不能直接放到library文件夹中,必须再创建下一级文件夹分类存放。
设置工作路径
设置工作路径有两种方式:临时设置、永久设置。
临时设置:
1.设置project路径:点屏幕左上角的Robcad 点Project选种数据格式:ce和co
ce和co都是文件夹形式,里面包含许多个数据文件,其中有个文件是预览图。预览图需要手动添加。添加方法后叙介绍。
ce数据相当于CATIA的product文件,只包含装配信息。
co数据相当于CATIA的part文件,包含三维数据。
Robcad数据存放结构
2.点屏幕左上角的Robcad ? 点Project选项 ? 如下图,出现一个以第一步定义的Project name为名称的选项,点击该选项。
Robcad 9.0安装教程
安装准备0.安装过程中,需要注意,第一,在自己设定安装路径时,不能出现空格,中划线,或者中文字样,并且不允许电脑插着U盘或者移动硬盘,电脑配置较低,建议不安装本软件,安装前关闭各种防护软件。
整个过程在30分钟以上,请安心等待。
1.首先对电脑进行简单设置。
2.桌面右击选择个性化,后选择Windows7 Basic3.打开用户账户选择“用户账户控制设置”(图2),进入账户设置(图3),选择从不通知。
重启电脑设置才能生效。
下面进入安装过程1.打开ROBCAD_9.0,选择Runme应用程序,双击打开,出现图示画面,点击Install Robcad9.0进入安装界面。
安装过程中,一直点击NXET,直至程序安装完成,直到安装成功,出现下图画面,选择不立刻重启,然后选择“Finish”,退出Runme 安装程序。
2.选择安装文件夹ROBCAD_9.0.1r_PC并打开,选择文件ROBCAD_9.0.1r_PC文件夹打开后选择Robcad901r文件,双击打开安装等待,中途出现“下一步”则点击“下一步”。
安装完成后出现下图,点击“finish”等待计算机重启。
3.开机后出现图,选择ok4.进入安装程序ROBCAD_9.0,选择bin文件夹中的roblms文件并复制,粘贴至文件安装位置C:\Robcad\bin\lm,(此路径为默认安装路径,如果安装文件位置变化,需要自己做出调整)。
5.进入安装程序ROBCAD_9.0,选择usr文件夹中.robcad并复制,粘贴至C:\Robcad\usr,(同样的不是默认的安装路径时,自己做出调整),到此基本完成安装过程。
6.再安转换插件(jt文件转换为co)7.装cad translater安装完成后,不需重启电脑,即可打开Robcad了。
浩辰CAD2012机械版安装手册
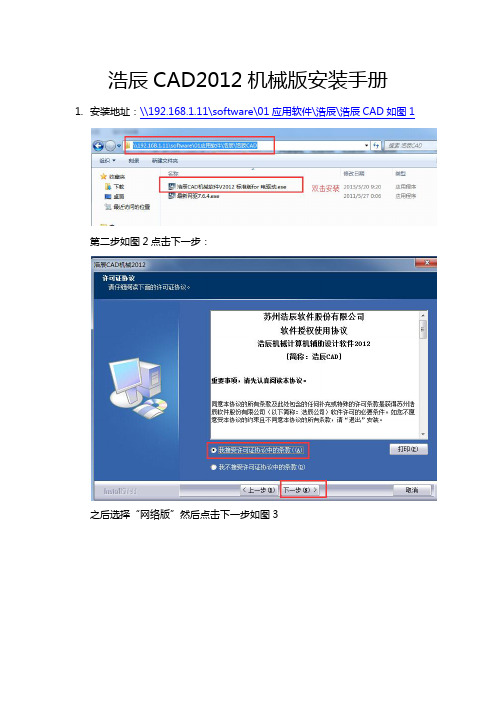
浩辰CAD2012机械版安装手册 1.安装地址:\\192.168.1.11\software\01应用软件\浩辰\浩辰CAD如图1
第二步如图2点击下一步:
之后选择“网络版”然后点击下一步如图3
然后选择安装路径:如图4,一般默认D盘不用动,该软件不是很大,1-200M 然后点击下一步:
下一步:如图5
如图6
安装过程中,等待几分种,弹出后如图7点击完成
完成后,默认软件是试用期30天,接下来激活为正式版。
方法
点击桌面左下角“开始”按钮找到“所有程序”选择“浩辰CAD机械2012”文件夹,选择“软件授权和启动设置”如图8
打开后将两个选项勾选“网络版”“启动时选择CAD平台”
服务器IP地址改为:192.168.1.7
启动设置不要动,默认即可。
如图9
确定完成后,打开桌面软件“浩辰CAD机械2012”图标,如图10
软件打开后,顶部显示为专业版,说明该软件激活完成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安装准备
0.到此基本完场安装过程,安装过程中,需要注意,第一,在自己设定安装路径时,不能出现空格,中划线,或者中文字样,并且不允许电脑插着U盘或者移动硬盘,电脑配置较低,建议不安装本软件,安装前关闭各种防护软件。
整个过程在30分钟以上,请安心等待。
1.首先对电脑进行简单设置。
2.桌面右击选择个性化,后选择Windows7 Basic,关闭,见图1
图1
3.打开用户账户选择“用户账户控制设置”(图2),进入账户设置(图3),选择从不通知
图2 图3
下面进入安装过程
1.打开ROBCAD_9.0,选择Runme应用程序,双击打开,出现图1画面,
图1
2.选择箭头所指,等待程序安装,过程中出现“next”,选择“next”,直到安装成功出现图2画面,选择不立刻重启,然后选择“Finish”。
图2
3.选择安装文件夹ROBCAD_9.0.1r_PC并打开,选择文件ROBCAD_9.0.1r_PC文件夹打开后选择Robcad901r文件,双击打开安装等待,中途出现“下一步”则点击“下一步”。
安装完成后出现图3,点击“finish”等待计算机重启。
图3
4.开机后出现图4,选择ok
图4
5.进入安装程序ROBCAD_9.0,选择bin文件夹中的roblms文件并复制,粘贴至文件安装位置C:\Robcad\bin\lm,(此路径为默认安装路径,如果安装文件位置变化,需要自己做出调整)。
6.进入安装程序ROBCAD_9.0,选择bin文件夹中.robcad并复制,粘贴至C:\Robcad\usr,(同样的不是默认的安装路径时,自己做出调整),到此基本完场安装过程,安装过程中。