ERV_控制箱使用说明书
ERV阀技术标准

Q/CDT 宁夏大唐国际大坝发电公司企业标准Q/CDT-DBpc.-2008(压力控制泄放阀)技术标准2008-00-00编制2008-00-00发布(宁夏大唐国际大坝发电公司)发布目次前言 (1)1 范围 (1)2 引用文件和资料 (1)3 概述 (1)4 设备参数 (1)5 零部件清册 (1)6 检修专用工器具 (2)7 检修特殊安全措施 (2)8 维护保养 (2)9 检修工序及质量标准 (3)10 检修记录 (6)前言为实现企业设备技术管理工作规范化、程序化、标准化,制定本标准。
本标准由(设备工程部)提出。
本标准由设备工程部归口并负责解释.本标准起草单位:本标准主要起草人:本标准是首次发布。
(ERV阀门)技术标准1 范围本标准规定了(ERV 压力控制泄放阀)的概述、设备参数、零部件清册、检修专用工器具、检修特殊安全措施、检修工序及质量标准、检修记录等相关的技术标准。
本标准适用于的技术管理工作。
2 引用文件和资料下列文件中的条款通过本标准的引用而成为本标准的条款.凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准.Crosby ERV型压力操纵泄放阀安装,运行及维修说明书■《阀门检修工艺规程》的2。
2《火力发电厂锅炉检修技术培训》注2。
3《中华人民共和国工人技术标准》■《电业安全工作规程》热力和机械部分3 概述ERV压力控制是一个大容量、动力驱动压力泄放阀。
运行方式为电力控制、先导操作以及压力负载.通过压力传感器提供的压力信号控制阀上的电磁线圈动作,泄放可在2%~10%范围内调节回座压差。
泄放阀也能通过一个三位面板开关进行手动操作。
ERV压力控制泄放阀一般安装在过热器联箱上,带有一个隔离阀,隔离阀安装于泄放阀与联箱之间。
4 设备参数4.1 技术规范5 零部件清册6 检修专用工器具7 检修特殊安全措施7.1 解体阶段安全措施7。
Quick 8802 系列数控伺服控制系统使用说明书
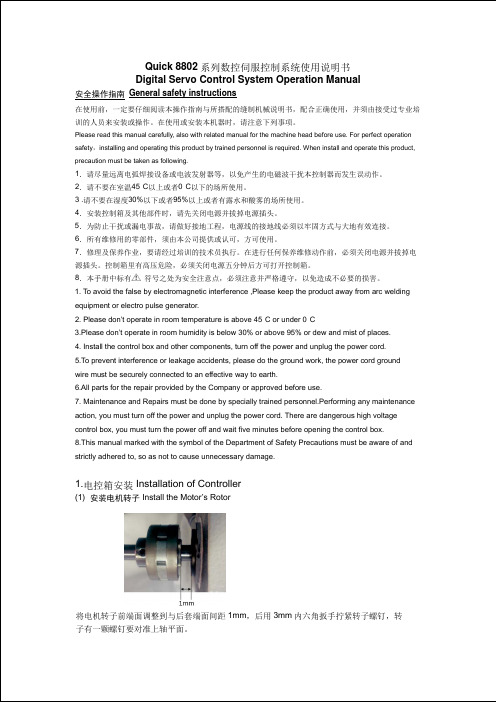
Quick 8802 系列数控伺服控制系统使用说明书 Digital Servo Control System Operation Manual安全操作指南 General safety instructions在使用前,一定要仔细阅读本操作指南与所搭配的缝制机械说明书,配合正确使用,并须由接受过专业培训的人员来安装或操作。
在使用或安装本机器时,请注意下列事项。
Please read this manual carefully, also with related manual for the machine head before use. For perfect operation safety , i nstalling and operating this product by trained personnel is required. When install and operate this product, precaution must be taken as following.1 .请尽量远离电弧焊接设备或电波发射器等,以免产生的电磁波干扰本控制器而发生误动作。
2 .请不要在室温 45 °C 以上或者 0 °C 以下的场所使用。
3 . 请不要在湿度 30 % 以下或者 95 % 以上或者有露水和酸雾的场所使用。
4 .安装控制箱及其他部件时,请先关闭电源并拔掉电源插头。
5 .为防止干扰或漏电事故,请做好接地工程,电源线的接地线必须以牢固方式与大地有效连接。
6 .所有维修用的零部件,须由本公司提供或认可,方可使用。
7 .修理及保养作业,要请经过培训的技术员执行。
在进行任何保养维修动作前,必须关闭电源并拔掉电源插头。
控制箱里有高压危险,必须关闭电源五分钟后方可打开控制箱。
8 .本手册中标有 符号之处为安全注意点,必须注意并严格遵守,以免造成不必要的损害。
. To avoid the false by electromagnetic interference ,Please keep the product away from arc welding 1 equipment or electro pulse generator.2 . Please don’t operate in room temperature is above 45°C or under 0°C ·3 .Please don’t operate in room humidity is below 30% or above 95% or dew and mist of places.4 . Install the control box and other components, turn off the power and unplug the power cord.5 .To prevent interference or leakage accidents, please do the ground work, the power cord ground wire must be securely connected to an effective way to earth.6 .All parts for the repair provided by the Company or approved before use.7 . Maintenance and Repairs must be done by specially trained personnel.Performing any maintenance action, you must turn off the power and unplug the power cord. There are dangerous high voltage control box, you must turn the power off and wait five minutes before opening the control box. 8 .This manual marked with the symbol of the Department of Safety Precautions must be aware of and strictly adhered to, so as not to cause unnecessary damage.1. 电控箱安装 Installation of Controller(1) 安装电机转子 Install the Motor’s Rotor将电机转子前端面调整到与后套端面间距1mm ,后用3mm 内六角扳手拧紧转子螺钉,转 子有一颗螺钉要对准上轴平面。
H3C ER3100V101R004版本说明书

H3C ER3100V101R004版本说明书杭州华三通信技术有限公司H3C ER3100V101R004版本说明书关键词:ER3100 R003 发布摘要:此版本为路由器ER3100第四个正式发布版本,支持丰富的负载均衡、ACL等特性,提供web管理方式。
缩略语:缩略语英文全名中文解释VLAN Virtual Local Area Network 虚拟局域网ServiceofQoS Quality服务质量ACL Access Control List 访问控制列表目录1 版本信息 (4)版本号 (4)历史版本信息 (4)版本配套表 (4)2 版本使用限制及注意事项 (4)版本使用限制 (4)注意事项 (4)3 存在问题与规避措施 (5)4 解决问题列表 (5)4.1.1 问题一 (5)5 配套资料 (5)配套资料清单 (5)配套产品资料的获取方法 (6)6 版本升级操作指导 (6)通过WEB方式升级 (6)通过TFTP方式升级 (7)表目录表1 历史版本信息表 (4)表2 版本配套表 (4)表3 配套手册清单 (5)表4 从网站查询和下载资料的说明 (6)1 版本信息版本号版本号:ER3100V101R004历史版本信息表1历史版本信息表版本号基础版本号发布日期备注ER3100V100R001首次发布2007-06-15无ER3100V101R002 ER3100V100R001 2007-07-16增加了新特性,解决了上一版本部分问题ER3100V101R003 ER3100V100R002 2007-10-09增加了新特性ER3100V101R004 ER3100V100R003 2008-4-15 解决弹性带宽出借之后收不回问题版本配套表表2版本配套表产品系列H3C型号ER3100目标文件名称ER3100V101R004.bin备注无2 版本使用限制及注意事项版本使用限制无。
注意事项无3 存在问题与规避措施1. 问题 1首次发现版本:ER3100V100R001问题描述:访问控制规则添加过多会影响设备转发性能。
serv-u10.0.0使用说明
Serv-U10.0.0使用说明快速入门指南Serv-U设计的配置简单,其灵活性和控制功能使您得以在可能的最佳安全保护下与其他人方便地共享文件。
快速入门指南将帮助您安装服务器,创建首个域,并向新域中添加用户帐户。
一旦完成这些简单步骤,您就能连接到新的文件服务器并开始传输文件!安装如果您是首次安装Serv-U,只需遵照安装屏上的指令选择安装目录并配置桌面快捷方式,以便快速访问服务器。
您也可选择将Serv-U 作为系统服务安装,这意味着当Windows 启动时自动启动Serv-U——在任何用户登录服务器前。
如果Serv-U 运行于专用的服务器机器,且没有交互式用户会话定期登录该服务器时,该选项很有用。
如果Serv-U 未作为系统服务安装,则登录Windows 后需要手动启动该软件。
如果覆盖安装现有Serv-U,我们推荐首先备份原始安装文件夹。
尽管可以安全地覆盖安装任何现有的Serv-U 并对数据文件和二进制代码进行必要的升级,在升级前备份关键组件仍被视为良好的数据管理措施。
如果进行升级的安装版本早于7.0 版,将会出现提示对话窗,指出在版本6 后作出的关键更改,以及这些更改会如何影响您对Serv-U 文件服务器的管理。
一旦完成安装,将启动Serv-U 管理控制台。
如果选择安装后不启动S erv-U 管理控制台,可以通过双击系统托盘内的Serv-U 图标,或单击右键选择"启动管理控制台" 选项,来随时启动控制台。
创建首个域完成加载管理控制台后,如果当前没有现存域会提示您是否创建新域。
单击是启动域创建向导。
任何时候要运行该向导,可以单击管理控制台顶部或更改域对话框内的新建域按钮,从管理控制台内的任何页面都可打开更改域对话框。
在Serv-U 文件服务器上创建新域有3 个简单步骤。
第一步是提供唯一的域名。
ES系列控制器 安装和使用手册说明书

ES Series Controls: Installation & Usage Manual (Version 2.1, JN 2018)A. Installing ES Series Controls: Preliminary Considerations1.Your kit includes: 1 ES Series Control, 2 mounting screws, 1 wall plate with mounting screws.2.ES Series controls are designed, if desired, to mount into a standard single- or multiple-gang switchreceptacle box. You may wire ES Series controls in Series or Parallel.3.You may use a virtually unlimited number of ES “M” and “T” controls per installation.4.You can use ES Series controls with Nu-Air Windsor Series controls and a variety of othermechanical switches. Consult the HRV/ERV manual for details.5.As a safety precaution, ensure that the HRV/ERV is unplugged before connecting any controlwires to it.B. Procedure1. Use a narrow-tipped flat-head screwdriver to secure control wires into theterminal block located on the back of the ES Series control:12 VDC—RedB—YellowA—GreenGND—Black2. At the HRV/ERV, screw the control wires into the removable 4-wireterminal block, then secure the terminal block into the HRV/ERV circuitboard plug.3. Install the appropriate wall plate. A single-switch wall plate is suppliedwith your ES Series control.Use 4-strand wire.A. Usage: Background InformationEac h ES Series control is equipped with a touch pad and 3 LED’s. The touch pad is used to select mode of operation or turn the appliance off. The LED’s indicate which mode of operation the HRV/ERV is operating in. E S Series controls follow “master -slave” logi c in that the most recent one used controls the HRV/ERV. For example, if the M1 control is currently on Hi and you use an M2 control to select Lo (or any other mode), the M2 control will assume command of the HRV/ERV. You will notice that the LED on both controls will now flash Lo . When a “feature” mode is selected (i.e. Hi or 20 Lo/ 40 Stby or 20 Lo/ 40 Recirc .), all other mode controls will switch to standby.B. Usage: One Simple Step to Operation1. To use your ES Series control, gently tap the labeled touch pad:C. Easy Navigation and ControlYou may toggle between operation modes by simply tapping the touch pad.The control LED will switch to indicate the current mode of operation.When toggling between modes the LEDs will light in an upward, then downward pattern.You can turn your HRV/ERV on or off with the ES Series controls, simply by tapping the touch pad. No LED’s shining indicates that the HRV/ERV is off.ES Series Controls: Description of OperationsES-T1The ES-T1 Timer is meant to bring the HRV/ERV into high speed for 20, 40 or 60 minutes. As the internal clock on the control counts down, you will notice that the LED will “mov e down” as each 20-minutesegment is completed. If your municipality requires that the timer be capable of activating the ventilator even when the main controller is set to the OFF position, move the jumper on each timer to the position illustrated below. In this mode, the LED MIGHT TAKE UP TO 10 SECONDS to light when the timer is activated.ES-M1No LED: HRV/ERV is OFF. Stby: Unit is in standby, ready for a command. Lo: Unit operates in low speed continuously. Hi: Unit operates in high speed continuouslyES-M2No LED: HRV/ERV is OFF. Stby: Unit is in standby, ready for a command. Lo: Unit operates in low speed continuously. 20 Lo/40 Stby: Unit cycles between 20 minutes continuous low and 40 minutes standby.ES-M3No LED: HRV/ERV is OFF. Stby: Unit is in standby, ready for a command. Lo: Unit operates in low speed continuously. 20 Lo/40 Stby: Unit cycles between 20 minutes continuous low and 40 minutes recirculation. Factory Setting on “NORMAL” Field Setting on “DEHUM”。
ER系列工业机器人操作手册说明书

ER系列工业机器人操作手册(RCS2V1 16)修订记录目录修订记录 (i)目录 (i)前言 (vi)概述 (vi)本书常用词汇 (vi)符号约定 (vi)安全注意事项 (vii)第1 章安全................................................................................................................................... 1-11.1 保障安全 .............................................................................................................................................. 1-11.2 专门培训 .............................................................................................................................................. 1-11.3 机器人使用说明书清单....................................................................................................................... 1-11.4 操作人员安全注意事项....................................................................................................................... 1-21.5 机器人的安全注意事项....................................................................................................................... 1-31.5.1 安装及配线安全 .............................................................................................................................................. 1-31.5.2 作业区安全 ...................................................................................................................................................... 1-41.5.3 操作安全 .......................................................................................................................................................... 1-51.6 移动及转让机器人的注意事项........................................................................................................... 1-61.7 废弃机器人的注意事项....................................................................................................................... 1-6第2 章产品确认........................................................................................................................... 2-12.1 装箱内容确认....................................................................................................................................... 2-12.2 订货号确认 .......................................................................................................................................... 2-1第3 章安装................................................................................................................................... 3-13.1 搬运方法 .............................................................................................................................................. 3-13.1.1 用吊车搬运电控柜 .......................................................................................................................................... 3-13.1.2 用叉车搬运电控柜 .......................................................................................................................................... 3-13.2 安装场所和环境................................................................................................................................... 3-23.3 安装位臵 .............................................................................................................................................. 3-2第4 章配线................................................................................................................................... 4-14.1 电缆连接的注意事项........................................................................................................................... 4-14.2 供电电源 .............................................................................................................................................. 4-14.3 连接方法 .............................................................................................................................................. 4-24.3.1 连接供电电缆 .................................................................................................................................................. 4-24.3.2 连接示教编程器 .............................................................................................................................................. 4-2第5 章电源的接通与切断........................................................................................................... 5-15.1 接通主电源 .......................................................................................................................................... 5-15.1.1 接通主电源 ...................................................................................................................................................... 5-15.1.2 初始化诊断 ...................................................................................................................................................... 5-15.1.3 初始化诊断完成时的状态............................................................................................................................... 5-25.2 接通伺服电源....................................................................................................................................... 5-25.3 切断电源 .............................................................................................................................................. 5-35.3.1 切断伺服电源(急停) .................................................................................................................................. 5-35.3.2 切断主电源 ...................................................................................................................................................... 5-3第6 章动作确认........................................................................................................................... 6-1第7 章系统部件........................................................................................................................... 7-17.1 电控柜 .................................................................................................................................................. 7-17.2 电源单元 .............................................................................................................................................. 7-37.3 控制单元 .............................................................................................................................................. 7-37.4 伺服驱动单元....................................................................................................................................... 7-57.5 输入输出单元....................................................................................................................................... 7-67.5.1 耦合器EE-R00 ................................................................................................................................................ 7-67.5.2 数字输入ER-1311 ........................................................................................................................................... 7-97.5.3 数字输出ER-2341 ......................................................................................................................................... 7-127.5.4 I/O从站的安装与组网 ................................................................................................................................... 7-157.6 示教编程器 ........................................................................................................................................ 7-207.6.1 外观 ................................................................................................................................................................ 7-207.6.2 按键 ................................................................................................................................................................ 7-217.6.3 显示 ................................................................................................................................................................ 7-227.6.4 模式开关介绍 ................................................................................................................................................ 7-247.6.5 急停按钮介绍 ................................................................................................................................................ 7-257.6.6 伺服使能开关介绍 ........................................................................................................................................ 7-257.6.7 示教编程器内部的接线端子信号定义......................................................................................................... 7-267.6.8 示教编程器线缆 ............................................................................................................................................ 7-26第8 章操作说明........................................................................................................................... 8-18.1 机器人的坐标系................................................................................................................................... 8-18.1.1 坐标系种类 ...................................................................................................................................................... 8-18.1.2 关节坐标系 ...................................................................................................................................................... 8-18.1.3 直角坐标系 ...................................................................................................................................................... 8-28.1.4 工具坐标系 ...................................................................................................................................................... 8-38.2 示教 ...................................................................................................................................................... 8-48.2.1 急停的确认 ...................................................................................................................................................... 8-48.2.2 示教模式及安全性保证 .................................................................................................................................. 8-48.2.3 示教前的准备 .................................................................................................................................................. 8-48.2.4 示教的基本步骤 .............................................................................................................................................. 8-58.2.5 轨迹的确认 .................................................................................................................................................... 8-108.2.6 程序的修改 .................................................................................................................................................... 8-118.3 再现 .................................................................................................................................................... 8-128.3.1 再现前的准备 ................................................................................................................................................ 8-128.3.2 再现步骤 ........................................................................................................................................................ 8-128.3.3 停止与再启动 ................................................................................................................................................ 8-128.3.4 修改再现速度 ................................................................................................................................................ 8-14第9 章系统功能介绍................................................................................................................... 9-19.1 工程管理 .............................................................................................................................................. 9-19.1.1 新建工程或程序 .............................................................................................................................................. 9-19.1.2 删除工程或程序 .............................................................................................................................................. 9-29.1.3 重命名工程或程序 .......................................................................................................................................... 9-39.1.4 复制/粘贴工程或程序 ..................................................................................................................................... 9-39.1.5 加载/注销工程或程序 ..................................................................................................................................... 9-39.1.6 自启动程序 ...................................................................................................................................................... 9-49.2 程序编辑 .............................................................................................................................................. 9-69.2.1 新增指令 .......................................................................................................................................................... 9-69.2.2 撤销指令 .......................................................................................................................................................... 9-89.2.3 其它操作 .......................................................................................................................................................... 9-99.3 程序数据 ............................................................................................................................................ 9-129.3.1 新增变量 ........................................................................................................................................................ 9-129.3.2 标准区域变量 ................................................................................................................................................ 9-159.3.3 多边体区域变量 ............................................................................................................................................ 9-169.3.4 工具坐标系变量 ............................................................................................................................................ 9-179.3.5 用户坐标系变量 ............................................................................................................................................ 9-189.3.6 外部工具坐标系变量 .................................................................................................................................... 9-199.3.7 其它操作 ........................................................................................................................................................ 9-209.4 IO检测 ................................................................................................................................................ 9-229.5 位臵管理 ............................................................................................................................................ 9-249.6 系统日志 ............................................................................................................................................ 9-259.6.1 查看系统日志 ................................................................................................................................................ 9-259.6.2 查看和导出系统日志 .................................................................................................................................... 9-269.7 系统设臵 ............................................................................................................................................ 9-299.7.1 用户管理 ........................................................................................................................................................ 9-299.7.2 通用设臵 ........................................................................................................................................................ 9-309.7.3 高级设臵 ........................................................................................................................................................ 9-31第10 章变量介绍....................................................................................................................... 10-110.1 基本数据类型................................................................................................................................... 10-110.2 位臵数据类型................................................................................................................................... 10-310.3 系统数据类型................................................................................................................................... 10-810.4 IO数据类型 .................................................................................................................................... 10-1410.5 摆动数据类型................................................................................................................................. 10-1510.6 时钟数据类型................................................................................................................................. 10-1610.7 区域数据类型................................................................................................................................. 10-1710.8 PLC数据类型 ................................................................................................................................. 10-1810.9 码垛数据类型................................................................................................................................. 10-1910.10 SOCKET数据类型....................................................................................................................... 10-20第11 章指令介绍....................................................................................................................... 11-111.1 运动指令........................................................................................................................................... 11-111.2 控制指令......................................................................................................................................... 11-1811.3 等待指令......................................................................................................................................... 11-2211.4 IO指令 ............................................................................................................................................ 11-2311.5 设臵指令......................................................................................................................................... 11-2811.6 位臵运算指令................................................................................................................................. 11-3211.7 传送带跟随指令............................................................................................................................. 11-3311.8 位运算指令..................................................................................................................................... 11-4011.9 时钟指令......................................................................................................................................... 11-4111.10 区域指令....................................................................................................................................... 11-4211.11 视觉指令....................................................................................................................................... 11-4211.14 软浮动指令................................................................................................................................... 11-5011.15 数学运算函数............................................................................................................................... 11-5111.16 字符串指令................................................................................................................................... 11-5511.17 阵列指令....................................................................................................................................... 11-6011.18 ModbusTCP指令 .......................................................................................................................... 11-62第12 章高级功能....................................................................................................................... 12-112.1 多类型区域监控............................................................................................................................... 12-112.2 碰撞检测 .......................................................................................................................................... 12-512.3 振动抑制 .......................................................................................................................................... 12-612.4 传送带跟随....................................................................................................................................... 12-712.5 系统IP设臵................................................................................................................................... 12-1212.6 示教器升级与备份......................................................................................................................... 12-1512.6.1 示教器程序升级 ........................................................................................................................................ 12-1512.6.2 示教器程序备份 ........................................................................................................................................ 12-1812.7 控制器运行程序更新..................................................................................................................... 12-1912.7.1 控制器程序更新 ........................................................................................................................................ 12-1912.7.2 控制器程序还原 ........................................................................................................................................ 12-2012.7.3 备份导出 .................................................................................................................................................... 12-2112.7.4 工程导入 .................................................................................................................................................... 12-2312.8 一点到达功能介绍......................................................................................................................... 12-2412.9 工具坐标系标定............................................................................................................................. 12-2512.10 用户坐标系/外部工具坐标系标定.............................................................................................. 12-2912.11 外部TCP功能 ............................................................................................................................. 12-3212.12 一点对正坐标轴........................................................................................................................... 12-3412.13 伺服管理 ...................................................................................................................................... 12-3612.14 二维视觉的使用........................................................................................................................... 12-3912.15 三维视觉的使用........................................................................................................................... 12-4112.16 ModbusTCP ................................................................................................................................... 12-4412.17 锁机与解除................................................................................................................................... 12-4812.18 软浮动功能................................................................................................................................... 12-5212.19 九点标定功能............................................................................................................................... 12-5612.20 多工位预约................................................................................................................................... 12-5812.21 变位机功能................................................................................................................................... 12-6312.22 倒序执行 ...................................................................................................................................... 12-6712.23 伺服参数自调节功能................................................................................................................... 12-6812.24 跨腕部奇异功能........................................................................................................................... 12-6912.25 回零功能 ...................................................................................................................................... 12-6912.25.1 功能概述 .................................................................................................................................................. 12-6912.25.2 整体回零 .................................................................................................................................................. 12-7012.25.3 单轴回零 .................................................................................................................................................. 12-7012.26 保养提示 ...................................................................................................................................... 12-7312.27 Scara快速标定.............................................................................................................................. 12-7512.28 去限位块丢零保护功能............................................................................................................... 12-84第13 章附录............................................................................................................................... 13-113.1 示教器权限分配表........................................................................................................................... 13-113.2 ModbusTCP控制接口数据表 .......................................................................................................... 13-413.3 报警信息一览表............................................................................................................................ 13-7前言概述本文档适用于控制系统RCS2 V1.28,描述了ER系列机器人的构成及其示教控制器的操作,有助于使用者了解并能掌握ER系列机器人的操作和使用。
兰舍erv250说明书
兰舍erv250说明书新风系统品牌-兰舍新风系统ERV250系列全热交换主机型号:ERV250/350/550HD风量(m³/h):250~550尺寸(mm):704*530*270~900*630*340接口尺寸(mm):φ125~160电压:220V~50Hz售后:3年简介:•全热交换芯体,对于室内新风进行预冷预热处理,适用于不同环境•吊顶安装,可搭配中央空调使用,可远程控制•双向流送排风,送排风过滤,提供清新空气用户体验反馈:通过使用兰舍新风系统ERV250系列全热交换主机,您将获得——1.每天低不到一度电,即使不开窗,也能享受洁净的呼吸品质2.孩子和老人不易患呼吸系统疾病,冬春更健康3.从噪音判断,感受不到新风系统的存在4.轻松掌控室内空气状况,可随时调整系统运行模式产品功能:1.电机分控,随心更节能兰舍新风系统ERV250系列全热交换主机采高效风机产品,可实现分控技术:送风及排风可进行单独控制,方便用户根据实际情况调节换气效果。
新风系统品牌-兰舍新风系统,能帮助您实现最佳舒适度和最好的节能效果。
1.专利热交换芯产品,过滤效果更好,维护更方便还使用需要定期更换的热交换芯?兰舍新风系统ERV250系列全热交换主机采用专利产品康舒芯,保证高效热交换率的同时,还可重复进行水洗,无需重新购买新热交换芯。
1.双层滤网,自动报警空气环境愈发恶劣,多一层滤网,就多一层对家人呼吸的保障。
兰舍新风系统ERV250系列全热交换主机同时采用双层滤网,即银离子+LM14双层滤网,可更彻底地隔绝室外有害物质。
同时液晶控制器自带滤网报警功能,新风系统品牌-兰舍新风系统,时刻帮您监控滤网状态。
1.智能操控,状态一目了然兰舍新风系统ERV250系列全热交换主机配备的液晶显示器,能够实时显示室内温度,并有高中低三档风量可供选择,同时具有时段编程控制功能,满足不同时段的不同换气需求。
设计时尚大气,彰显品位。
1.WV导轨,高度防漏新风系统的密闭性是整个系统正常运行的关键,兰舍新风系统ERV250系列全热交换主机使用的机芯滤网一体WV型导轨设计,能够将内部气体泄漏的可能性降到最低,避免交叉污染。
ERV_控制箱现场问题
电磁泄放阀(ERV)控制箱现场问题1、阀门不动作1)判断电源是否接好,POWER灯是否亮。
2)判断开关是否闭合及保险是否完好。
3)若为气动,输入气源压力是否正常 (0.6MPA)。
4)LIMIT SWITCH &TORQUE SWITCH(电动)接线是否正确。
5)DCS OPEN,DCS CLOSE(DCS输入,无源脉冲,脉冲大于1秒)接线是否正确。
6)若配有远手操控制面板,则必须接上。
2、RED LION 仪表显示不正常1)开机时看仪表读数当无4-20mA输入信号时,仪表读数应为-25,若为0,则需进行输入标定。
(参照RED LION说明书)仪表显示值设置为传感器满量程的百分比传感器输出为4 mA 时,仪表显示值为0传感器输出为20mA时,仪表显示值为100(用户可根据情况更改显示设置)2)当有4-20mA输入信号时,若仪表读数没有跟随输入信号而变化,先判断4-20mA输入信号接线极性及信号源性质是否正确。
警告:* 4-20mA模拟输入信号必须为无源信号,否则RED LION仪表会烧毁。
若没有无源4-20mA模拟输入信号源,用有源输入,则接线需改动!!!** 输入信号范围:0-20mA,不要超范围3)当4-20mA输入信号正确时,若仪表读数仍没有跟随输入信号而变化,需判断RED LION仪表是否被误操作将仪表锁住,解决办法:① 恢复出厂设置,重新设置仪表。
② 若无法重新设置仪表,则将仪表后7、8短接线去掉,恢复出厂设置,重新设置仪表,再将7、8短接线接好。
③若仪表仍无变化,判断仪表输入端是否被烧毁:测量仪表输入端4、5输入阻抗应为20Ω,若为无穷大,则输入端已被烧毁。
补救措施:见《仪表修改图》,会降低精度调整仪表输入范围:0-10V输入调整仪表标定点: 传感器输出为 4 mA (2V)时,仪表显示值为0传感器输出为20 mA(10V)时,仪表显示值为100 其它设置不变3、控制箱输出CHOICE MANUAL、FULL OPEN、FULL CLOSE均为无源触点输出,有动作时触点闭合。
erv阀动作原理
erv阀动作原理
erv阀的工作原理基于流体力学原理。
当介质通过阀门时,阀门内部的阀芯会受到流体的压力作用,从而实现阀门的开启和关闭。
阀门
的开关可以通过手动操作或自动控制实现。
erv阀的原理可以简单描述为以下几步:
1. 开启阀门:通过手动或自动操作,使阀门内部的阀芯离开阀座,留出一定的通道,介质可以通过阀门流动。
2. 介质流动:介质受到外部压力作用,从高压区域流向低压区域,通过阀门的通道流动。
3. 关闭阀门:通过手动或自动操作,使阀芯重新与阀座接触,阻止介质继续流动。
ER系列工业机器人Walden网关配置手册说明书
ER系列工业机器人Walden网关配置手册RCS2 V1.00南京埃斯顿自动化股份有限公司南京埃斯顿机器人工程有限公司-本文档符合ISO体系要求,并会根据IPD体系变化更新-文档修订记录目录前言 (1)读者对象 (1)注意事项 (1)安全说明 (1)第1 章功能概述 (2)第2 章协议介绍 (3)2.1 PROFINET介绍 (3)2.2主要指标 (3)2.3硬件环境 ............................................................................................错误!未定义书签。
2.4功能配置 (4)第3 章网关调试说明 (5)3.1 硬件接线图 (5)3.2 Multiprog配置 (5)3.3西门子PLC配置 (9)前言本手册适用于控制系统RCS2 V1.27.00及以上版本,介绍埃斯顿ER系列机器人EtherCAT转ROFINET网关的功能调试和使用方法。
读者对象本手册仅供埃斯顿机器人相关技术支持人员使用。
注意事项⚫在安装和调试这些组件时,操作人员必须严格遵循本文档的说明和解释。
⚫相关负责人员必须确保所述产品的应用或使用满足所有安全要求,包括相关法律、法规、准则和标准。
⚫尽管本文档经过精心编制,但由于其中所描述的产品仍处于不断更新换代中,我们可能不会在每次更新后都检查文档中所描述的产品性能数据、标准或其它特性总是与实际产品相一致。
⚫本文档中难免会出现一些技术或者编辑错误,我们保留随时对文档信息做出修改之权力,恕不另行通知。
对于已经变更的产品,如果本文档中的数据、图表以及文字描述没有修改,我们将不再特别加以声明。
⚫任何人不得对软、硬件配置进行文本档中规定之外的修改,ESTUN公司对因此而造成的一切后果不承担任何责任。
⚫本文档中出现图示单位在没有特别标注说明时,默认单位为毫米mm。
安全说明第 1 章功能概述EtherCAT接口是指外部逻辑控制器通过标准EtherCAT协议与机器人通讯的一种通讯方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电磁泄放阀(ERV)控制箱使用、操作说明书
1、阀门及控制系统工作方式
当过热器出口处的蒸汽压力超过正常工作压力,达到预先设定的开启压力时,控制箱将发出指令通过执行机构打开ERV主阀泄放蒸汽,当蒸汽压力降低到预先设定的关闭压力(一般为开启压力的98%)时,控制箱将发出指令通过执行机构关闭ERV主阀。
1)在就地控制箱上将手动(MANUAL)/自动(AUTO)切换开关置于手动(MANUAL)时:通过控制箱面板上的开关按钮来手动开启(OPEN)/关闭(CLOSE)阀门,或通过布置在控制室里的远手操控制面板来手动开启(OPEN)/关闭(CLOSE)阀门;
2)在手动(MANUAL)/自动(AUTO)切换开关置于自动(AUTO)时:当系统压力在正常工作压力范围内时,可通过DCS远程信号来开启(DCS OPEN)/关闭(DCS CLOSE)阀门。
注:DCS远程信号为无源脉冲信号, 脉冲大于1秒。
3)在手动(MANUAL)/自动(AUTO)切换开关置于自动(AUTO)时:系统会根据“RED LION”予先设置的参数,当压力传感器到达开启压力(SP2)时,阀门自动打开;当压力低于关闭压力(SP1)时,阀门自动关闭。
2.控制系统类型
ERV控制系统有三种:
1)与配电动执行机构的电磁泄放阀配套,电动执行机构电源为380V AC/50Hz/3Ph;
控制箱控制电源为220V AC/50Hz/1Ph.。
用户只需提供电源:380V AC/50Hz/3Ph 即可,三线五线制
2)与配气动执行机构的电磁泄放阀配套,控制箱控制电源为220V AC/50Hz/1Ph.
用户提供电源:220V AC/50Hz。
3)与配气动执行机构的电磁泄放阀配套,控制箱控制电源为220VDC或110VDC
用户提供电源:220VDC或110VDC。
4) 远手操控制面板(可选项)
3. 压力传感器
测压范围:0-250bar, 0-400bar或其他
工作温度:-20℃~80℃(介质温度最高610℃)
信号输出:两线制 4-20mA输出,24VDC电源由控制箱提供。
4.显示
1)控制箱灯显
POWER、MANUAL、AUTO、OPEN、CLOSE
2)远手操控制面板灯显
MANUAL、AUTO、OPEN、CLOSE
3) RED LION仪表
仪表显示值设置为传感器满量程的百分比
传感器输出为4 mA 时,仪表显示值为0
传感器输出为20mA时,仪表显示值为100
(用户可根据情况更改显示设置)
5. RED LION仪表设置
参照RED LION说明书进行设置
6.接线
电动:
1) POWER:380V AC/50Hz,三线五线制
2) MOTOR、LIMIT SWITCH &TORQUE SWITCH
3) TRANSDUCER
注意:接线时( +, - )切勿接反,调试时若用信号源模拟传感器4-20mA输出信号,信号源应为无源信号,否则RED LION仪表会烧毁。
4) DCS OPEN,DCS CLOSE(DCS输入,无源脉冲)
5) CHOICE MANUAL、FULL OPEN、FULL CLOSE(无源输出,有动作时触点闭合)
气动:
1) POWER:220V AC或220VDC或110VDC
2) LIMIT SWITCH
3) TRANSDUCER
注意:接线时( +, - )切勿接反,调试时若用信号源模拟传感器4-20mA输出信号,信号源应为无源信号,否则RED LION仪表会烧毁。
4) DCS OPEN,DCS CLOSE(DCS输入,无源脉冲)
5) CHOICE MANUAL、FULL OPEN、FULL CLOSE(无源输出,有动作时触点闭合)
远手操控制面板(可选项):
按图纸要求接线。