DC1040操作手册范本
霍尼韦尔DC1040中文说明书
DC1010/1020/1030/1040系列数字控制器操作手册在使用本控制器之前,请先确定控制器的输入输出范围和输入输出种类与您的需求是否相符。
1、面板说明DC1010DC1020DC1030DC10401.1七段显示器PV:过程值(process value),红色4位显示。
SV:设定值(setting value),绿色4位显示。
1.2LEDOUT1:第一路输出(Output1),绿色灯OUT2:第二路输出(Output2),绿色灯AT:自整定(AutoTuning),黄色灯PRO:程序运行中(Program),黄色灯AL1:第一路报警(Alarm1),红色灯AL2:第二路报警(Alarm2),红色灯AL3:第三路报警(Alarm3),红色灯MAN:手动,黄色灯*注意:当发生故障(Error)时,MAN灯亮,输出百分比归零。
1.3按键SET:设定键(写入设定值或切换模式):移位键(移动设定位数):减少键:增加键A/M:自动(Auto)/手动(Manual)切换键2、自整定功能(AutoTuning)2.1将AT(在User Leve中)设定为YES,启动自整定功能2.2ATVL:自整定偏移量(AUTO Tuning offset Vaiue)SV减ATVL为自整定设定点,设定ATVL可以避免自整定时,因PV值振荡而超过设定点(Overshoot).3、故障信息注意:当有“*”标记的故障发生时,请与供应商联系。
4、操作流程(1):按“SET”键。
(2):按“SET”键持续5秒(3):当LCK=‘1111’时,按“SET”键和‘5秒。
(4):当LCK=‘0000’时,按“SET”键和‘’键持续5秒。
1.1Level14.1.1)改变参数。
按下移位键,第一位数开始闪烁。
按增加键()对此数值作增加或减少,再按移位键到第二位数,当所有数值设定好后,按SET 键完成数值设定。
4.1.2SET 键也有转换模式的功能,按下SET 键会显示下一种模式。
DC1040系列温控仪操作说明书
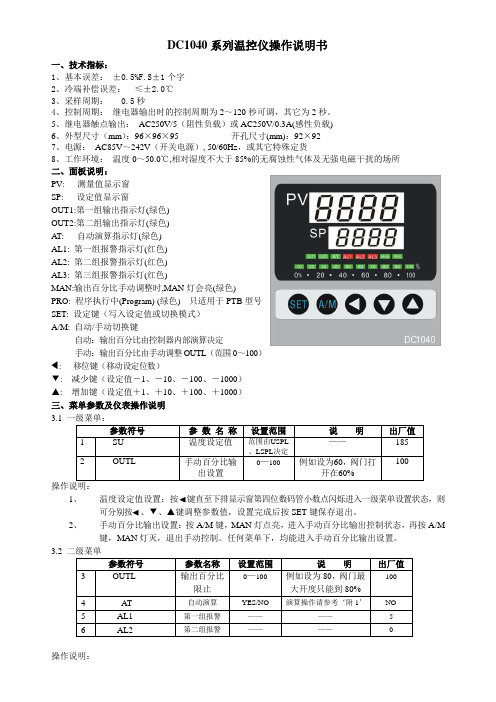
DC1040系列温控仪操作说明书一、技术指标:1、基本误差:±0.5%F.S±1个字2、冷端补偿误差:≤±2.0℃3、采样周期: 0.5秒4、控制周期:继电器输出时的控制周期为2~120秒可调,其它为2秒。
5、继电器触点输出:AC250V/5(阻性负载)或AC250V/0.3A(感性负载)6、外型尺寸(mm):96×96×95 开孔尺寸(mm):92×927、电源:AC85V~242V(开关电源), 50/60Hz,或其它特殊定货8、工作环境:温度0~50.0℃,相对湿度不大于85%的无腐蚀性气体及无强电磁干扰的场所二、面板说明:PV: 测量值显示窗SP: 设定值显示窗OUT1:第一组输出指示灯(绿色)OUT2:第二组输出指示灯(绿色)AT: 自动演算指示灯(绿色)AL1: 第一组报警指示灯(红色)AL2: 第二组报警指示灯(红色)AL3: 第三组报警指示灯(红色)MAN:输出百分比手动调整时,MAN灯会亮(绿色)PRO: 程序执行中(Program) (绿色) 只适用于PTB型号SET: 设定键(写入设定值或切换模式)A/M: 自动/手动切换键自动:输出百分比由控制器内部演算决定手动:输出百分比由手动调整OUTL(范围0~100): 移位键(移动设定位数)▼: 减少键(设定值-1、-10、-100、-1000)▲: 增加键(设定值+1、+10、+100、+1000)三、菜单参数及仪表操作说明3.1 一级菜单:参数符号参数名称设置范围说明出厂值1 SU 温度设定值范围由USPL、LSPL决定——1852 OUTL 手动百分比输出设置0—100 例如设为60,阀门打开在60%100操作说明:1、温度设定值设置:按键直至下排显示窗第四位数码管小数点闪烁进入一级菜单设置状态,则可分别按、▼、▲键调整参数值,设置完成后按SET键保存退出。
2、手动百分比输出设置:按A/M键,MAN灯点亮,进入手动百分比输出控制状态,再按A/M键,MAN灯灭,退出手动控制。
DC1040中文简易说明书

'.
'.
'.
附件1自动演算(Auto Tuning)
1、 首先将二级菜单中的AT 设定为YES ,启动演算功能。
2、 自动演算结束,控制内部会产生一组新的PID 参数取代原有的PID 参数
自动演算适用于控温不准时,由控制器自行调整PID 参数。
AT AL :自动演算偏移量(Auto Tuning off set Value );
SV 减ATVL 为自动演算设定点,设定ATVL 可以避免自动演算时因PV 值震荡而超过设定值点(Overshoot )。
例如SV = 200℃,ATV = 5,则自动演算设定点为195℃。
当自动演算中,PV 值震荡,则是在195℃上下震荡,因此可避免PV 震荡超过200℃。
附件2 报警动作说明 ▲ : SV ▽:PV 代码
报警名称及说明 代码
报警名称及说明 00/10
没有报警功能
13
偏差高低报警
01
偏差高报警(第一次不产生报警)
04/14
区域内报警
11
偏差高报警
05
绝对值高报警(第一次不产生报警)
02
偏差低报警(第一次不产生报警)
15
绝对值高报警
12
偏差低报警
06
绝对值低报警(第一次不产生报警)
03 偏差高低报警(第一次不产生报警)
绝对值低报警
16
'.。
温度表DC1010、DC1040等

1DC1010/1020/1030/1040 产品手册1DC1000系列通用控制器中文操作手册½öÓÃÓÚÆÀ¹À¡£°æȨËùÓÐ (c) by Foxit Software Company, 2004ÓÉ Foxit PDF Editor ±à¼-2DC1010/1020/1030/1040 PRODUCT MANUAL3DC1010/1020/1030/1040 产品手册34DC1010/1020/1030/1040 PRODUCT MANUAL5DC1010/1020/1030/1040 产品手册 5LCK=0001, 只进入LEVEL1并允许改变SP 值 LCK=0101, 除改变LCK 功能外,其它任何参数不能改变7DC1010/1020/1030/1040 产品手册79DC1010/1020/1030/1040 产品手册9假设SET8.3=1,SP值西安市将被改成PV值显示。
达到期望SP值的时间将被减少。
达到SP值的剩余时间显示在参数‘TMER’中。
在此,倒计数的时间是与PV值相关,而不是程序段。
11DC1010/1020/1030/1040 产品手册1112DC1010/1020/1030/1040 PRODUCT MANUAL13DC1010/1020/1030/1040 产品手册133) 结束功能如果ALD 设定为 17 (* 参看选择表), 此程序将在程序8或程序段16结束。
* 这样,在显示窗口中的 PV 和 END 将闪烁,报警继电器动作。
如果程序少于八个程序段,控制器就没有END 命令。
这样,请将下一程序段的 OUT 设定为0(out=0),程序就将在下一设定程序段结束。
1040说明书

摘要-------------------------------------------------------------------------------------------(1)Abstract-------------------------------------------------------------------------------------(2)1绪论-----------------------------------------------------------------------------------------(3)2 转向从动桥的结构形式选择----------------------------------------------------------(4)2.1 对从动桥的要求-----------------------------------------------------------------------(4)2.2转向从动桥的结构分析---------------------------------------------------------------(4)2.2.1前梁-------------------------------------------------------------------------------------(4)2.2.2主销-------------------------------------------------------------------------------------(5)2.2.3转向节----------------------------------------------------------------------------------(5)2.2.4转向节臂,转向梯形臂-------------------------------------------------------------(5)2.2.5转向横拉杆----------------------------------------------------------------------------(5)2.2.6转向节推力轴承----------------------------------------------------------------------(5)2.2.7主销上下轴承-------------------------------------------------------------------------(6)2.2.8轮毂轴承-------------------------------------------------------------------------------(6)2.2.9左右轮胎螺栓-------------------------------------------------------------------------(6)2.3前轮定位角------------------------------------------------------------------------------(6)2.3.1主销内倾角----------------------------------------------------------------------------(6)2.3.2主销后倾角----------------------------------------------------------------------------(6)2.3.3前轮外倾角----------------------------------------------------------------------------(7)2.3.4前轮前束-------------------------------------------------------------------------------(7)3 非断开式转向从动桥主要零件尺寸确定--------------------------------------------(7)3.1 前梁尺寸的确定------------------------------------------------(7)3.2 主销尺寸的确定------------------------------------------------(7)4 非断开式转向从动桥主要零件的强度校核-----------------------------------------(7)4.1非断开式转向从动桥前梁应力的计算-------------------------------(8)4.1.1在制动工况下的前梁应力计算----------------------------------------------------(8)4.1.2在最大侧向力(侧滑)工况下的前梁应力计算-------------------------------(10)4.1.3越过不平路面时前梁的强度计算-------------------------------------------------(11)4.2 转向节在制动和侧滑工况下的应力计算-----------------------------------------(11)4.2.1 转向节在制动工况下的转向节应力计算---------------------------------------(12)4.2.2汽车在侧滑工况下的转向节应力计算-------------------------------------------(12)4.3主销与转向节衬套在制动和侧滑工况下的应力计算---------------------------(13)4.3.1汽车在制动时主销与转向节衬套的应力计算----------------------------------(13)4.3.2汽车在侧滑工况下主销与转向节衬套的应力计算----------------------------(15)4.4转向节推力轴承的计算---------------------------------------------------------------(16)5结束语--------------------------------------------------------------------------------------(17)致谢-------------------------------------------------------------------------------------------(18)参考文献-------------------------------------------------------------------------------------(19)附录-------------------------------------------------------------(20)此次设计是我们毕业设计,是大学中非常重要的实践课程之一。
霍尼韦尔DC1000系列操作手册中文版

1DC1010/1020/1030/1040 产品手册1DC1000系列通用控制器中文操作手册2DC1010/1020/1030/1040 PRODUCT MANUAL3DC1010/1020/1030/1040 产品手册34DC1010/1020/1030/1040 PRODUCT MANUAL5DC1010/1020/1030/1040 产品手册 5LCK=0001, 只进入LEVEL1并允许改变SP 值 LCK=0101, 除改变LCK 功能外,其它任何参数不能改变7DC1010/1020/1030/1040 产品手册79DC1010/1020/1030/1040 产品手册9假设SET8.3=1,SP值西安市将被改成PV值显示。
达到期望SP值的时间将被减少。
达到SP值的剩余时间显示在参数‘TMER’中。
在此,倒计数的时间是与PV值相关,而不是程序段。
11DC1010/1020/1030/1040 产品手册1112DC1010/1020/1030/1040 PRODUCT MANUAL13DC1010/1020/1030/1040 产品手册133) 结束功能如果ALD 设定为 17 (* 参看选择表), 此程序将在程序8或程序段16结束。
* 这样,在显示窗口中的 PV 和 END 将闪烁,报警继电器动作。
如果程序少于八个程序段,控制器就没有END 命令。
这样,请将下一程序段的 OUT 设定为0(out=0),程序就将在下一设定程序段结束。
否则控制器将运行8个或16个程序段。
4) 连接功能PTN=1, 进行模式1, 它包含8个程序段 PTN=2, 进行模式2, 它包含8个程序段PTN=0, 连接进行模式1和模式2 ,共有碍6个程序段 (首先设定PTN1和PTN2, 然后设定 PTN=0)5) 其它功能 (*参看 level 4)SET8.1=1 程序重运行 SET8.2=0 无停电处理功能 SET8.2=1 有停电处理功能(如果电源中断, 控制器仍将保持内存记忆功能。
DMC-B140手册
霍尼韦尔DC1040中文说明书
DC1010/1020/1030/1040系列数字控制器操作手册在使用本控制器之前,请先确定控制器的输入输出范围和输入输出种类与您的需求是否相符。
1、面板说明DC1010DC1020DC1030DC10401.1七段显示器PV:过程值(process value),红色4位显示。
SV:设定值(setting value),绿色4位显示。
1.2LEDOUT1:第一路输出(Output1),绿色灯OUT2:第二路输出(Output2),绿色灯AT:自整定(AutoTuning),黄色灯PRO:程序运行中(Program),黄色灯AL1:第一路报警(Alarm1),红色灯AL2:第二路报警(Alarm2),红色灯AL3:第三路报警(Alarm3),红色灯MAN:手动,黄色灯*注意:当发生故障(Error)时,MAN灯亮,输出百分比归零。
1.3按键SET:设定键(写入设定值或切换模式):移位键(移动设定位数):减少键:增加键A/M:自动(Auto)/手动(Manual)切换键2、自整定功能(AutoTuning)2.1将AT(在User Leve中)设定为YES,启动自整定功能2.2ATVL:自整定偏移量(AUTO Tuning offset Vaiue)SV减ATVL为自整定设定点,设定ATVL可以避免自整定时,因PV值振荡而超过设定点(Overshoot).3、故障信息注意:当有“*”标记的故障发生时,请与供应商联系。
4、操作流程(1):按“SET”键。
(2):按“SET”键持续5秒(3):当LCK=‘1111’时,按“SET”键和‘5秒。
(4):当LCK=‘0000’时,按“SET”键和‘’键持续5秒。
1.1Level14.1.1)改变参数。
按下移位键,第一位数开始闪烁。
按增加键()对此数值作增加或减少,再按移位键到第二位数,当所有数值设定好后,按SET 键完成数值设定。
4.1.2SET 键也有转换模式的功能,按下SET 键会显示下一种模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1):按“SET”键。
(2):按“SET”键持续5秒
(3):当LCK='1111'时,按“SET”键和’'键持续5秒
(4):当LCK='0000'时,按“SET”键和’’键持续5秒。
4.1 Level 1
显示PV值 显示SP值
输岀限幅
百分点
自整定
状态
第一路报警设定
第二路报警设定
第三路报警设定
4.1.1按移位键(卫改变参数。按下移位键,第一位数开始闪烁。按增加键()或减少
报警1(AL1)时间设定
用于程序功能(范围:0~99.59min.)
0=闪烁报警,99.59=连续报警,其它值
AL2报警模式范围:00〜19
报警2(AL2)时间设定 与ALT1相同
AL3报警模式范围:00〜19
报警3(AL3)时间设定
与ALT1相同
延迟时间
SP值补偿
PV值补偿
范围:-1000〜1000
LCK=0000,允许进入Level3然后按SET+SHIFT键(<)
LCK=1111,允许进入Level4然后按SET+SHIFT键(<)
LCK=0101,除切换LCK夕卜,无其它功能。
4.4.2让显示进入LEVEL2的“LCK”,并设定LCK='1111
4.4.3SET功能
SET
功能
SET
功能
1.1
MV传送
辅助输出使用
9.3
SP专送
9.4
PV专送
0.3
0=无远程设定SP直
1=有远程设定SP直
*警告:请不要运行SET8.4,否则将造成控制器的混乱。
如果SET8.4=1,则控制器处于’单显示’模式。既PV值的LED灯将不再显示,SP值的LED
灯将显示取反值或者状态或者重复显示。
PV
SP
假设SET8.3=1,SP值将被改成PV值显示
Main Control与ANL1相同
模拟幅度设定
小数点设定小数点位置
设定点低限
设定点高限
子控制
模拟零点设定
子控制
模拟幅度设定
在INP1内设定最低点
在INP1内设定最高点
与输入代码AN1-AN5使用相同
范围:LSPL~USPL
与ANL2相同
AL1报警模式范围:00〜19
参见P.15'6.1报警功能选择
DC1000
中文操作手册
亚
司
艾
国
际
贸
易 (上 海 )有 限
公
司
地
址:
市
闵
行
区中
春路6
11
1号7
13
室
:
(021)5
10
8-6599
传真:
(02
1)336
088
68
**使用本手册前,请检查量程ห้องสมุดไป่ตู้输入、输出是否符合您的要求
1.面板说明
1.1显示
PV:过程值(Process Value),四位显示(红色)
例如:SP= 200°C, ATVL= 5,则自整定点是195°C
* ATVL务必自整定点在程序类型模式中(195°C)
2.4自整定失败
2.4.1ATVL值太大
如果不能确定,则设定ATVL= 0
2.4.2系统时间太长.
单独设定PID参数.
3.
主控制传感器开路(INP1)
1n
IE
Ad
LF
*匚」
EE
冷端补偿故障
I net
子控制传感器开路(INP2)
UUJ1
PV值超过USPL(INP1)
nnn 1
PV值低于LSPL(INP1)
LJULE
子控制输入信号超过上限(INP2)
nriLi己
子控制输入信号低于下限(INP2)
* rFILJF
存(RAM)故障
i nbF
接口故障
RUtF
自整定失败
注意:当有“*”标记的故障发生时,控制器需 进行维修
键(它)对此数值作增加或减少,再按移位键到第二位数,当所有数值设定好后,按
SET键完成数值设定。
4.1.2SET键也有转换模式的功能,按下SET键会显示下一种模式。
4.1.3按SET键持续5秒可进入LEVEL2,或同样可返回LEVEL1。
4.1.4If如果在一分钟没有按下任何键,将显示进入LEVEL1。
4.1.5不管处于哪一层,按A/M键就可进入LEVEL1。
4.1.6输岀限幅百分比是“0”时,表示控制器没有输岀。
4.2 Level2
范围:0〜200%
子控制仅用于第二路输出,设顶此值早于
输岀间隙(第二路输岀)SP值返回“ON”
功能锁定
LCK=0100,进入LEVEL1 &LEVEL2,并允许改变参数
ALD1
7.1
CASC
3.2
ALT1
7.2
OUD
3.3
ALD2
7.3
OPAD
3.4
ALT2
7.4
Hz
4.1
ALD3
4.2
ALT3
4.3
HYSA
4.4
CL01,CH01
SET
功能
备注
8.1
0=程序非重复
程序使用
1=程序重复
8.2
0=无停电处理功能
1=带停电处理功能
8.3
0=从0开始
1=从PV值开始
9.2
1.3按键
SET
:模式&设定键(切换模式和写入设定值)
<
:移位键
V
:减少键
△
:增加键
A/M
:自动/手动切换键
2.
2.1将AT设置为’YES'即启动自整定功能。
2.2自整定完成后,PID参数将被自动设定。
2.3 ATVL=自整定偏移量,由SP值推导岀来。
(它在自整顶时,可防止整荡超过设定点)
SP-ATVL=自整定设定点值,ATVL=自整定偏移量
范围:LSPL〜USPL
PV值&SP单位
范围:C, F, A(模拟)
4.4 Level 4 (锁存功能)
441LCK功能
LCK=0100,进入Level1 & 2并允许改变参数。
LCK=0110,进入Level1 & 2并允许改变Level1的参数。
LCK=0001,仅进入Level1并允许改变SP值。
SP:设定值(Set Point),四位显示(绿色)
1.2 LED
OUT1:第一路输岀(Output1),绿色灯
OUT2:第二路输岀(Output2),绿色灯
AT
:自整定,黄色灯
PRO
:程序运行中,黄色灯
AL1
:第一路报警(Alarm1),红色灯
AL2
:第二路报警(Alarm2),红色灯
MAN:手动控制,黄色灯
I CK=0110进入IEVEI1&IEVEI2并允许改变IEVEI1的参数
4.3 Level 3
当LCK=OOOO,
按SET键和SHIFT
键持续5秒,进入LEVEL3
主控制选择输入范围
输入选择
主控制 模拟零点设定
参见P.13〜P.14 5.1
输入选择
与输入代码AN1-AN5使用相同
范围:LSPL〜USPL
OUTL
5.1
CL02,CH02
1.2
AT
5.2
CL03,CH03
1.3
AL1
5.3
Rucy,WAIT,HYSM
1.4
AL2
5.4
IDNO,BAUD
2.1
AL3
6.1
SVOS
2.2
ANL1,ANH1,DP
6.2
PVOS
2.3
LSPL,USPL
6.3
UNIT
2.4
ANL2,ANH2
6.4
SOFT
3.1