混合驱动平面五杆并联机构的工作空间研究
《2024年五自由度并联调姿平台机构学研究》范文

《五自由度并联调姿平台机构学研究》篇一一、引言五自由度并联调姿平台(5-DOF Parallel Positioning Platform)作为现代机械装置中的重要一环,被广泛应用于各类高端工业自动化设备、航空制造以及机器人领域。
机构学的研究对理解并改进该类设备的运动特性及设计出更加先进的装置至关重要。
本文将对五自由度并联调姿平台的机构学进行研究,通过深入的理论分析以及实际仿真来探讨其工作原理和性能特点。
二、五自由度并联调姿平台的结构特点五自由度并联调姿平台主要由基座、动平台、驱动装置和连接杆等部分组成。
其结构特点在于,通过多个驱动装置的协同作用,实现动平台在五个方向上的自由运动。
其中,五个自由度通常包括三个平移运动和两个旋转运动,具有高度的灵活性和精准度。
三、机构学研究1. 运动学分析机构学的首要任务是进行运动学分析。
五自由度并联调姿平台的运动学分析主要包括对平台的位置、速度和加速度的描述。
通过建立合适的坐标系和运动方程,可以分析出平台在不同驱动条件下的运动轨迹和运动速度,为后续的动力学分析和控制策略提供基础。
2. 动力学分析动力学分析是机构学研究的另一重要内容。
通过对五自由度并联调姿平台的驱动力、惯性力、约束力等动力学因素的分析,可以得出平台在不同运动状态下的动态特性和稳定性。
此外,动力学分析还可以为驱动装置的选择和优化提供依据。
3. 结构优化设计结构优化设计是提高五自由度并联调姿平台性能的关键手段。
通过分析机构的运动传递路径、结构参数等因素,优化机构的设计参数,提高平台的承载能力、运动速度以及动态性能。
同时,利用有限元分析和多目标优化等现代设计方法,可以实现机构设计的轻量化、高效化和智能化。
四、仿真与实验研究1. 仿真研究利用计算机仿真技术对五自由度并联调姿平台进行仿真研究,可以有效地验证理论分析的正确性。
通过建立仿真模型,模拟平台在不同驱动条件下的运动过程,分析平台的运动轨迹、速度和加速度等参数,为实际设备的制造和调试提供指导。
《五自由度并联调姿平台机构学研究》范文
《五自由度并联调姿平台机构学研究》篇一一、引言随着工业自动化和智能制造的快速发展,机器人技术得到了广泛的应用。
其中,五自由度并联调姿平台作为一种高精度、高效率的机器人机构,在航空航天、汽车制造、医疗设备等领域具有广泛的应用前景。
本文旨在研究五自由度并联调姿平台的机构学,包括其结构特点、运动学分析、动力学建模以及控制策略等方面。
二、五自由度并联调姿平台结构特点五自由度并联调姿平台主要由基座、动平台、驱动装置和连接杆等部分组成。
其结构特点包括:1. 高精度:采用并联机构设计,具有较高的刚度和承载能力,能够实现高精度的调姿操作。
2. 高效率:通过多个驱动装置协同作用,实现动平台的快速响应和高效运动。
3. 多功能性:通过调整连接杆的长度和角度,可以实现多种不同的运动轨迹和姿态调整。
三、运动学分析运动学分析是研究五自由度并联调姿平台运动规律的重要手段。
通过对平台进行正逆运动学分析,可以得出动平台在给定驱动条件下的位置、速度和加速度等信息。
正运动学分析主要研究驱动装置的输入与动平台输出位置之间的关系;逆运动学分析则主要研究给定动平台的位置和姿态,求解驱动装置的输入。
四、动力学建模动力学建模是研究五自由度并联调姿平台运动过程中力和力矩传递规律的重要手段。
通过对平台进行动力学建模,可以得出动平台在运动过程中所受的力和力矩,以及驱动装置的输出力矩和功率等信息。
动力学模型可以采用拉格朗日方程、牛顿-欧拉方程等方法进行建立。
五、控制策略研究控制策略是五自由度并联调姿平台实现精确调姿操作的关键。
针对五自由度并联调姿平台的特性,可以采用多种控制策略,如基于PID控制、模糊控制、自适应控制等。
在实际应用中,需要根据具体的需求和场景选择合适的控制策略,以实现高精度、高效率的调姿操作。
六、实验研究与应用为了验证五自由度并联调姿平台的机构学研究和控制策略的有效性,需要进行实验研究。
可以通过搭建实验平台,对平台的运动学、动力学和控制策略进行实验验证。
《2024年度五自由度并联调姿平台机构学研究》范文

《五自由度并联调姿平台机构学研究》篇一一、引言随着工业自动化和智能制造的快速发展,机器人技术得到了广泛的应用。
其中,五自由度并联调姿平台作为一种重要的机器人机构,在工业生产、航空航天、医疗康复等领域具有广泛的应用前景。
本文旨在研究五自由度并联调姿平台的机构学,为该领域的研究和应用提供理论依据和技术支持。
二、五自由度并联调姿平台的概述五自由度并联调姿平台是一种具有五个独立运动轴的机器人机构,可以实现空间三维姿态的调整和定位。
该机构由基座、动平台、驱动装置、连杆等部分组成,具有结构紧凑、运动范围广、承载能力强、动态性能好等优点。
在工业生产中,五自由度并联调姿平台可以用于自动化装配、检测、包装等任务;在航空航天领域,可以用于卫星姿态调整、空间实验平台等任务;在医疗康复领域,可以用于康复训练、假肢控制等任务。
三、五自由度并联调姿平台的机构学研究(一)机构结构分析五自由度并联调姿平台的机构结构主要包括基座、动平台、连杆和驱动装置等部分。
其中,基座是机构的支撑部分,动平台是机构的工作部分,连杆是机构的主要传动部分,驱动装置则是控制机构的运动部分。
在机构结构分析中,需要分析机构的运动范围、刚度、稳定性等性能指标,为后续的优化设计提供依据。
(二)运动学分析运动学分析是研究机构运动规律的重要手段。
对于五自由度并联调姿平台,需要建立机构的运动学模型,分析机构的运动轨迹、速度和加速度等运动参数。
同时,还需要考虑机构的奇异性问题,即机构在某些特殊位置下可能出现的运动不连续或不稳定的情况。
通过运动学分析,可以优化机构的运动规划和控制策略,提高机构的运动性能和稳定性。
(三)动力学分析动力学分析是研究机构受力情况和运动规律的重要手段。
对于五自由度并联调姿平台,需要建立机构的动力学模型,分析机构的受力情况、刚度和动态响应等性能指标。
同时,还需要考虑机构的能量消耗和热力学问题。
通过动力学分析,可以优化机构的驱动和控制策略,提高机构的承载能力和动态性能。
《五自由度并联调姿平台机构学研究》范文

《五自由度并联调姿平台机构学研究》篇一一、引言随着现代工业技术的快速发展,五自由度并联调姿平台在航空航天、精密制造、医疗设备等领域得到了广泛应用。
五自由度并联调姿平台具有高精度、高效率、高灵活性的特点,因此其机构学研究显得尤为重要。
本文旨在深入探讨五自由度并联调姿平台的机构学原理、设计方法、运动控制等方面,为相关领域的研究和应用提供理论支持。
二、五自由度并联调姿平台的机构学原理五自由度并联调姿平台主要由动平台、定平台、驱动装置和连接杆等部分组成。
其机构学原理是通过驱动装置驱动连接杆,使动平台在空间中实现五个方向的姿态调整。
这五个方向包括三个线性移动和两个旋转运动,可满足各种复杂工况的需求。
三、五自由度并联调姿平台的设计方法五自由度并联调姿平台的设计过程需要综合考虑多个因素,包括机构的拓扑结构、驱动方式、负载能力、运动范围等。
首先,要确定机构的拓扑结构,即确定动平台、定平台和连接杆的布局。
其次,根据实际需求选择合适的驱动方式,如液压驱动、电动驱动等。
然后,要合理设计机构的尺寸参数,以确保机构的负载能力和运动范围满足要求。
最后,要进行机构的动力学分析和仿真验证,以确保机构的稳定性和可靠性。
四、五自由度并联调姿平台的运动控制五自由度并联调姿平台的运动控制是实现机构高精度、高效率运行的关键。
运动控制包括姿态控制、轨迹规划和实时监测等部分。
姿态控制是通过传感器实时监测动平台的姿态信息,并根据预设的姿态参数进行调节。
轨迹规划是根据任务需求规划出最佳的动平台运动轨迹。
实时监测则是通过传感器实时监测机构的运行状态,一旦发现异常情况及时进行处理。
五、实验与分析为了验证五自由度并联调姿平台的性能和设计方法的正确性,我们进行了多组实验。
实验结果表明,该平台具有较高的负载能力和运动范围,可实现高精度的姿态调整。
同时,该平台的运动控制算法具有较好的稳定性和响应速度,可满足各种复杂工况的需求。
此外,我们还对不同结构参数对机构性能的影响进行了分析,为后续的优化设计提供了依据。
并联机构工作空间方法的分析

并联机构工作空间方法的分析并联机构是指由若干个运动副构成的平行结构,其中多个副同时对同一运动变量进行控制。
不同于串联机构,其运动自由度数目可以大于其中每个运动副的自由度数目之和。
并联机构不仅具有高刚度、高精度、高载荷能力等优势,还能够提供更大的工作空间并实现高精度运动和控制。
工作空间是指机构能够执行运动的位置和方向的组合。
在分析并联机构的工作空间时,应先确定其基本运动副及其限制条件,然后对每个基本运动副进行建模,最后求解并联机构的整体工作空间。
在基本运动副建模方面,目前主要有基于Minkowski(闵可夫斯基)和基于代数运算等两种方法。
基于Minkowski方法是将运动副看做一些联立的凸多面体,通过求解这些多面体的Minkowski和来得到机构的工作空间边界。
该方法的优势在于其高精度且应用范围广泛;缺点则是其计算复杂度较高,对于大型机构而言时间较长。
基于代数运算的方法则是基于运动副的运动学关系以及代数方程求解的原理,其优势是可以有效解决复杂机构的计算问题,但其缺点是对于数学求解能力要求较高。
在整体工作空间求解方面,可使用约束优化方法、遗传算法、神经网络等较为常见的算法。
其中,约束优化方法是一种以优化函数为目标,通过求解约束条件的方法得到最优解的算法。
而遗传算法和神经网络则是通过模拟自然界进化和人类神经网络的工作原理来求解并联机构的工作空间。
需要注意的是,由于并联机构存在多个运动副同时控制同一运动变量的情况,因此运动副之间的干涉问题需要得到充分的考虑。
在机构设计过程中,需要进行多次优化以及演示分析,以保证机构的工作稳定性和灵活性。
综上所述,分析并联机构的工作空间是一个十分重要而复杂的问题。
该问题需要考虑机构的设计、运动干涉等复杂因素,需要运用数学、计算机技术等多种专业知识和技能来解决。
近年来,随着机器人等高精度机电一体化系统的不断发展和应用,对并联机构工作空间分析的研究也将越来越深入和广泛。
《2024年度五自由度并联调姿平台机构学研究》范文

《五自由度并联调姿平台机构学研究》篇一一、引言随着现代工业技术的快速发展,五自由度并联调姿平台(简称并联调姿平台)因其卓越的运动特性和稳定性在机器人、航空、医疗等多个领域中获得了广泛应用。
本篇论文将探讨该机构的运动学理论、结构设计以及相关研究进展,以期为进一步推动并联调姿平台技术的发展提供理论支持。
二、五自由度并联调姿平台的机构学基础五自由度并联调姿平台主要由多个可伸缩的连杆、多个伺服电机驱动的铰接点以及固定基础构成。
每个铰接点均可实现多方向的运动,使平台具备多自由度调姿能力。
其机构学特点在于,平台可同时实现平动和转动,从而满足各种复杂运动需求。
三、运动学分析针对五自由度并联调姿平台的运动学特性,本文主要通过正向和反向运动学两种方式进行分析。
正向运动学分析是指通过输入电机参数和位置,预测平台的整体姿态;反向运动学分析则是通过给定的目标姿态,确定驱动电机应具备的参数和位置。
这两种分析方法为平台的精确控制提供了理论依据。
四、结构设计及优化在五自由度并联调姿平台的结构设计中,需考虑多种因素,如刚度、负载能力、运动范围等。
本文提出了一种新型的并联调姿平台结构,通过优化设计,提高了平台的承载能力和稳定性。
同时,采用模块化设计,使得平台在维护和升级时更为便捷。
此外,为降低平台的能耗和提高工作效率,还需对平台的控制策略进行优化。
五、研究进展与展望近年来,五自由度并联调姿平台在机器人、航空、医疗等领域的应用越来越广泛。
许多学者在平台运动学理论、结构设计等方面取得了显著成果。
例如,利用现代计算机技术和先进的算法,使得平台具有更高的控制精度和更大的工作空间。
此外,随着新材料的应用和制造工艺的进步,五自由度并联调姿平台的性能将得到进一步提升。
未来,五自由度并联调姿平台的研究将更加注重智能化和自主化。
通过引入人工智能技术,使平台具备更强的自主决策和学习能力,从而更好地适应各种复杂环境和工作需求。
此外,随着物联网技术的发展,五自由度并联调姿平台将与其他设备实现互联互通,形成更加智能化的系统。
《2024年度五自由度并联调姿平台机构学研究》范文
《五自由度并联调姿平台机构学研究》篇一一、引言随着现代工业自动化和机器人技术的飞速发展,对高精度、高效率的机械调姿平台的需求日益增长。
五自由度并联调姿平台作为一种新型的机构装置,其灵活性和适应性被广泛应用于各个领域。
本文将重点探讨五自由度并联调姿平台的机构学研究,旨在为相关领域的科研工作者提供一定的理论依据和实践指导。
二、五自由度并联调姿平台的概述五自由度并联调姿平台是一种具有五个独立运动轴的机械装置,能够实现空间三维位置和姿态的精确调整。
该平台由多个运动支链、基座、动平台等部分组成,通过并联的方式实现多个运动支链的协同运动,从而实现调姿的目的。
五自由度并联调姿平台具有结构紧凑、刚度高、承载能力强、运动精度高等优点,被广泛应用于航空航天、精密制造、医疗设备等领域。
三、机构学研究1. 结构组成与特点五自由度并联调姿平台的结构主要包括动平台、基座、多个运动支链等部分。
其中,动平台是调姿平台的主要承载部分,其运动范围和姿态由多个运动支链的协同作用决定。
基座是整个机构的支撑部分,负责将调姿平台固定在所需位置。
多个运动支链通过并联的方式连接动平台和基座,实现调姿平台的精确运动。
此外,该平台还具有高精度、高稳定性、高响应速度等特点,为不同领域的精确调整需求提供了强有力的技术支持。
2. 运动学分析运动学分析是研究五自由度并联调姿平台的关键技术之一。
通过对机构中各部分之间的相对位置和速度关系进行分析,可以得出机构的运动学方程。
这些方程描述了机构中各部分之间的运动关系,为后续的控制系统设计和优化提供了重要的理论依据。
在运动学分析中,需要考虑机构的约束条件、关节角度范围等因素,以确保机构能够满足实际需求。
3. 动力学分析动力学分析是研究五自由度并联调姿平台的另一个重要技术领域。
通过对机构中各部分之间的相互作用力和力矩进行分析,可以得出机构的动力学方程。
这些方程描述了机构在运动过程中所受到的力和力矩,为机构的优化设计和控制提供了重要的依据。
并联机构工作空间方法的分析
并联机构工作空间方法的分析并联机构是指由多个平行连接的机构成为一个整体的机构,并且各个机构的端部都连接在一个移动平台上。
由于并联机构的结构特点和运动特性,使其在实际应用中具有广泛的应用前景。
并联机构的工作空间分析是指研究机构在各个自由度上能够达到的位置的空间范围,通过对工作空间的分析可以发现机构的最优设计方案,也可以作为机构控制算法的基础。
本文通过解析并联机构运动学进行点的追踪和空间区域的计算,具体阐述了并联机构工作空间的方法分析。
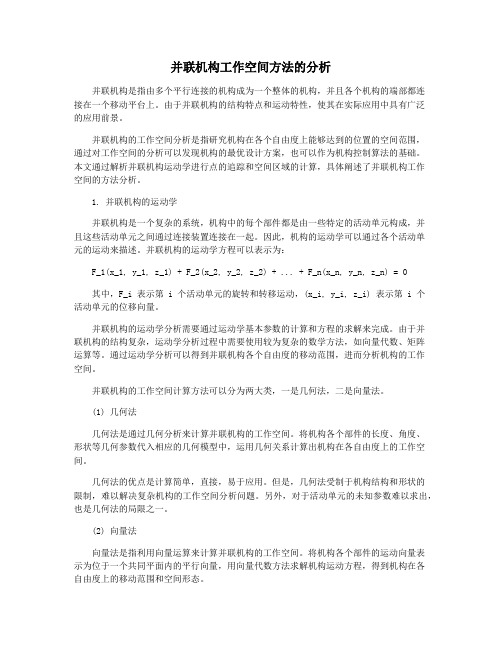
1. 并联机构的运动学并联机构是一个复杂的系统,机构中的每个部件都是由一些特定的活动单元构成,并且这些活动单元之间通过连接装置连接在一起。
因此,机构的运动学可以通过各个活动单元的运动来描述。
并联机构的运动学方程可以表示为:F_1(x_1, y_1, z_1) + F_2(x_2, y_2, z_2) + ... + F_n(x_n, y_n, z_n) = 0其中,F_i 表示第 i 个活动单元的旋转和转移运动,(x_i, y_i, z_i) 表示第 i 个活动单元的位移向量。
并联机构的运动学分析需要通过运动学基本参数的计算和方程的求解来完成。
由于并联机构的结构复杂,运动学分析过程中需要使用较为复杂的数学方法,如向量代数、矩阵运算等。
通过运动学分析可以得到并联机构各个自由度的移动范围,进而分析机构的工作空间。
并联机构的工作空间计算方法可以分为两大类,一是几何法,二是向量法。
(1) 几何法几何法是通过几何分析来计算并联机构的工作空间。
将机构各个部件的长度、角度、形状等几何参数代入相应的几何模型中,运用几何关系计算出机构在各自由度上的工作空间。
几何法的优点是计算简单,直接,易于应用。
但是,几何法受制于机构结构和形状的限制,难以解决复杂机构的工作空间分析问题。
另外,对于活动单元的未知参数难以求出,也是几何法的局限之一。
(2) 向量法向量法是指利用向量运算来计算并联机构的工作空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(A+丑+C)X2—2DⅨ+A+曰一C=0
(5)
其中
A=砰+层+层+z;一琏
8=224f5cos口4—2fl Z4cos(六一日1)一2Zl Z5cos口1 C=223 Z4c08口4+22325—221f3cos口l
D=223 Z4s协以一2Zl Z3sin口l X:X(Zl,Z2,Z3,Z4,Z5,p1,六)=taIl(口3/2)
工 命作=点 一r:纵r坐 c2oc标so(的s铲鸭位口置刊’误蛊差 雨△ 揣抵y△出为zf一l—
嘲[sin鸲以一训r:蛊sin(揣臼,△一口f)3{+粼]△z。一
咖uf配Ⅲng qu粕titative删ysis and tlle硒seIIlbly em叶,t}Ie p血ciple 0f锄珊supelpositi∞is applied in the
0f tIle
acc呲y e珊r innuence 0n me
of workspace,Which h嬲黟eat practical si印mc锄ce.
绘制混合驱动平面五杆并联机构的工作空间的程 序流程图如图3所示。
要使常规电机和伺服电机都做单向周转运动,且 符合实际工况要求。平面五杆中最长杆与较短两杆杆 长之和小于其他两杆杆长之和,且最长杆作为机架、较 短两杆作为连架杆[5】1822—1823。例如,Zl-8,f2=26,f3 =28,Z4=10,z5=30,72=20,此时Zl、Z4均作单向整周 转动。
实际应用中不太直观;文献[6]根据混合输入五杆机构 的可动性条件用图解的方法给出了连杆铰接处的工作 空间,但是精度不高且求解效率低。本文中我们采用解 析法定量推导出常速、伺服电机不同组合的转角输入所 对应的机构工作点位置输出,并给出求解流程图,通过 Mat协编程实现运用软件方式绘制工作空间;此外,运 用原始误差独立作用原理(叠加原理),针对机构理论设 计用于实践过程中构件制造、装配误差而引起的机构工 作点的工作空间误差进行了分析。
万方数据
算机工具,求解具有较高的精度和效率。
机械传动
20lO年
对象接触而破坏机械手表面或者无法与加工对象作用 而做无用功。因此,在设计与使用混合驱动平面五杆 机构时,必须将工作空间的误差考虑进去。
图3工作空间的程序设计流程图
图6口=90p时点^的工作空间
图4口=俨时点^的工作空间
图5口=6俨时点A的工作空间
文章编号:1004—2539(2010)04—0020一04
机械传动
2010年
混合驱动平面五杆并联机构的工作空间研究
彭利平訾斌
(中国矿业大学机电工程学院,江苏徐州221116)
摘要针对混合驱动平面五杆并联机构,首先,基于杆件封闭矢量方程,推导出机构工作点(髫,,,) 与常速电机、伺服电机不同组合的转角输入的关系。其次,在机构符合混合驱动平面五杆机构构型的前 提下,根据上面推导出的关系计算出工作点坐标。从而高效、精确地定位工作点。此外,应用Madab软件 编程实现了同一混合驱动下机构工作点不同装配角度a时的工作空间,直观地表达了工作点所能达到 的范围。最后,考虑到无法避免机构构件的制造与装配误差,运用原始误差独立作用原理,定量地推导 出误差对工作空间的影响,具有一定的实际意义。
(均为2),所以该并联机构具有完全确定的运动,即可
以进行定量的解析法分析。
此处设五杆长度分别为Zl、Z2、Z3、Z4、Z5,其矢量表
示分别为11、f2、13、k、Z5,杆件与轴正向的夹角分别为
口l、口2、口3、良、95、酽。Bl、曰2处分别由常速电机和伺服
电机对杆件1和杆件4进行驱动。
对杆件l、2、3、4、5,根据矢量闭合,可以得到
(10)
a—a笪如 -懈in畛口)薏
a—a羔口
一r2sin(口3一口)
a~a 笠吃
一r2cos(口3一口)
a—a 上“
吨枷,-口)鬻
a—a 上如
吨础s.口)爱
a—a 上如
ncos池_口)薏
a—a上“ 枷。-r2sill(”口)薏
a—a 上如
吨础s刊薏
a—a 上口
r2c∞(口3一口)
a—a 上吃
岛inf毋,一D)
关键词混合驱动平面五杆并联机构工作空间 数值仿真
Study伽w0帅l撇of恤Hyb—d-埘咖胁咖K静b盯跏讪el删砌i册
Peng Uping zi BirI
(Sdl∞l 0f Mecll栅d荡E119ineeriIlg,Chi眦Univ衄dty of MiniI.g aIld Te西l∞Lo盯,‰矗叫22ll 16,Chim)
△P=(甏)似-+(差)似2+...+(蓑)馘
针对本文中我们研究的混合驱动平面五杆机构, 工作点坐标的误差厶、甜分别为
厶“蠹)△¨(笼)厶z2“琵)△z3“薏)出4+
(蠢)△z5+(老)血+(券)△r2
(8)
句=(裁)△l·+(薏)△12+(薏)△f3+ (薏)△f4+(薏)△f5+(凳)如+(毫)△r2 (9)
t}le鲫舢tor Abs咖n Ai|Ilillg m hyMd-曲咖plan盯five—bar parallel InechaIlism,firsdy,t}le re蜥on between dle position
of tIle worl【irIg point肌d tlle input comer of nomlal瑚tor to萨tller witll
1混合驱动平面五杆并联机构模型
混合驱动五杆机构示意图如图1所示。常速电机
使他杆作匀速运动,为系统提供主要的动力;伺服电 机驱动朋杆做调节运动,柔性调节工作点的位置,并 为系统提供辅助动力。由于仙由常速电机驱动,因 此该衄必须是无条件周转‘7I。实际应用中,考虑到
万方数据
第34卷第4期
混合驱动平面五杆并联机构的工作空问研究
当工作点装配角度口取不同值时,工作点A的工 作空间如图4一图7所示。
由上面的数学推导可以看出,机构的一组输入(吼, 84)可以得到两个工作点输出(名,y),在工作空间上就表
现出独立的两块区域,如图4~图7所示。图形具有柔 性变化的趋势,符合混合驱动柔性输出的特征。实例证 明运用类似逐步搜索法搜索常规电机整周转动下所有 伺服电机转角值,然后根据解析法分析得到的输入和输 出的关系求出工作点位置的方法是可行的,而且运用计
e珩ciem砸entati∞0f tIle worl【irIg point.hl addi-
w缺space拥ng tion,a
0f t王le wo矗ing point诵th difreIent鹅sembly an甜es is derived by璐ing Matlab,肌d tIIe
scope 0f wo出ing point could be achieved is e印Dessed intuitive.Fi瑚ny,co璐id耐ng tlle co璐istent e】【istence 0f tIle
3工作空间误差分析
机构的工作空间是机构工作点在整个运动过程中 所能到达的位置点的集合,由于平面五杆机构生产过 程中构件的制造误差及装配过程中铰链处产生的装配 误差,易使机构的物理参数(如杆长、装配角度等)发生 变化,这将直接影响机构的工作范围。特别是对于工 作在工作空间临界位置处的机械手,容易使之与加工
,l+Z2+,3+厶+f5=O
(1)
复数形式为
/=Zl扩l+Z2,2+Z3∥(2”+巳)~Z4—钆一Z5—%=O
(2)
易得式(2)实、虚部满足
Re∽=zlcos日l+z2cos口2+13cos口3一f4cos以一f520
(3)
Im(厂)=fls协口l+Z2siIl口2+Z3sin目3一Z4sin日4=O(4) 消去式(3)、式(4)中秽2并进一步化简得到
这是一个关于x的一元二次方程,在实数域中要
使方程有解,必须满足
△=4D2—4(A+露+C)(A+召一C)≥0
(6)
此时方程解为
Y一旦圭堑旦:=(丛±旦±堡)(丛±旦=£)
。‘一
A+B+C
则83=2眦t肌x
模型中,工作点A位置坐标满足
f戈=z5+z4cos六一r2cos(口3一口)
,1、
、’7
【,,=z4sin口4一r2sin(口3一口)
2l
伺服电机受控频繁正、反转对电机性能寿命的影响,因
而将伺服电机设计成单向变速转引引,这类问题也是
我们研究的对象。
C
图l混合输入五杆机构示意图
图2混合驱动平面五抒机构模型简图
在笛卡尔坐标系中建立混合驱动平面五杆并联机
构的数学模型简图如图2所示。模型中,点A为工作
点的坐标位置。由于机构自由度数与主动件数相等
Key words Hybrid.出ven pLanar five.bar parallel mechaIli锄Worl【space Nu眦rical siInuhtion
O引言
混合驱动机构的思想是由英国利物浦科技大学的 J叩俗于20世纪90年代提出的【1J,它是可控机构中的一 种,是对多自由度机构的某一输入构件的电动机进行伺 服控制,其余输入构件的电动机仍是不可控常速电机, 从而实现柔性化的轨迹输出和运动输出【2J。混合驱动 机构的研究以混合驱动二自由度的五杆机构、七杆机构 居多,而柔性工作空间的研究是混合驱动机构的基本问 题以及需要进一步研究的问题之一【3.4J。工作空间是 指机构运动过程中其工作点所能达到的全部位置在空 间上的集合,其形状和大小反映了机构实际工作的能 力。文献[5]1勉-1髓运用隐函数存在定理,通过推导出 平面闭链五杆机构工作空间边界的条件,提出了混合输 入五杆机构的工作空间求解算法,但是需要复杂的求 导、矩阵计算,而且给出的空腔与工作空间较难区分,在
数值求解模型时Zl、z2、z3、‘、f5、口均已知,所以 最终(茗,,,)=…=(菇(口1,以),y(8l,以))(式中的“…” 表示化简过程)。根据以上数学计算编写程序,就可以