基于SimMechanics的挖掘机工作装置运动仿真分析
基于Matlab的挖掘装载机挖掘装置回转过程的仿真研究
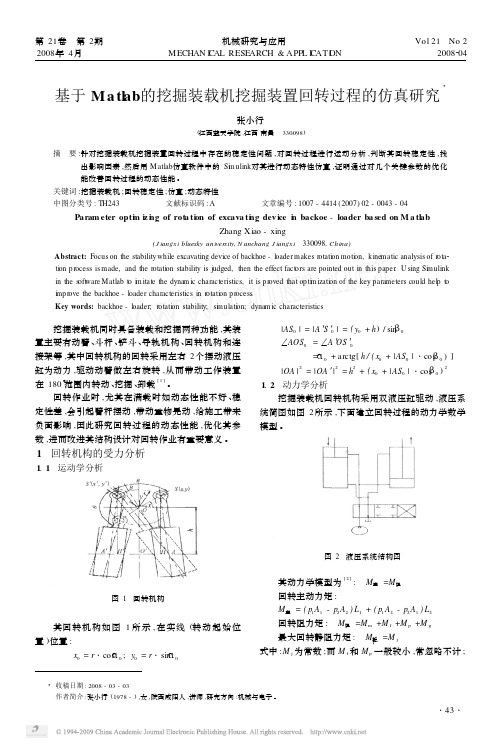
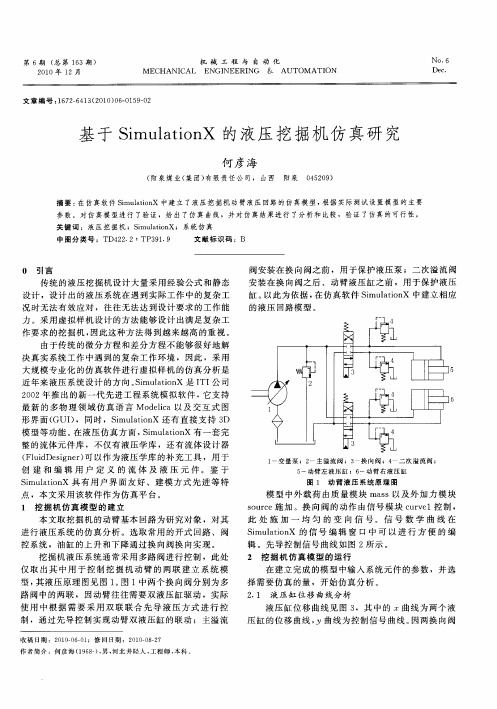
r的取值使回转过程
所用时间 t值有所不同 ,对时间的影响比较小 。
图 4 回转半径 r与时间 t的关系曲线
·44·
表 1 该液压缸主要参数
型 号
缸径 (mm ) 杆径 (mm )
D (mm )
XV (mm )
ZL (mm ) 工作压力 (MPa) 最大行程 (mm ) 最大静回转阻力矩 M j (N ·m ) 油缸起始驱动力 P起 (MPa) 油缸内径 A1 (mm2 ) 活塞杆直径 A2 (mm2 )
、h
和
r的值不变且等于样机给
定值时
,角
β 0
的不同取值对
ε m
ax的值有明显影响
:
当
β 0
取
45°~90°之间的值时 ,εmax的值相对较大 ,且受
β 0
影响较大
;而
β 0
取
0°~45°和
60°~90°之间的值
时
,εm ax的值相对小
,且几乎不受
β 0
影响
。从图
4可
看出
r对
t影响较大
,而
β 0
、h
和
HSGK01 - 90 /45 E
90 45 114 < 230 307 101. 79 (推力 ) 、76. 347 (拉力 ) 2000 1. 4 ×103 17. 5 6. 36 ×103 4. 77 ×103
(3) 由于 2个回转油缸安装在蛙式支腿上 ,能绕 铰接点左右摆动 。可看出两油缸安装轴的中心距离 X 受蛙式支腿结构的限制 ,而且要使机构在回转过程 中即使发生摆动两油缸也不干涉 。这种约束反映在 数学表达式上为 : X +D < 550。
基于Matlab-Simulink的挖掘机挖掘力仿真分析
of the relationship wa8 done.The result could be the guideline of excavator’s manipulator cvlinder ch008e.
Key words:hydraulic excavatoE digging force ma诺Matlab—Simulink
Abstract:The kinematical and dynamic model of manipulator for a hydrau“c excavator with Matlab—Simulink ba8ed on
robotics was e8tablished.Then the map of the relationship between load and cylinder force was obtained,and analysis
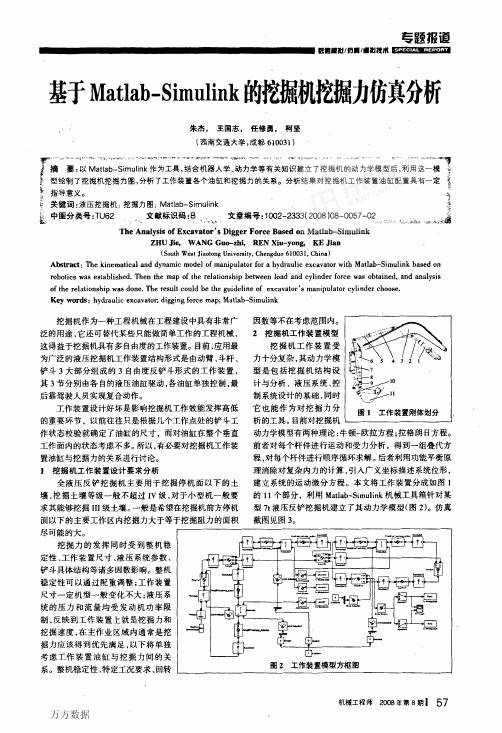
工作装置设计好坏是影响挖掘机工作效能发挥高低 的重要环节,以前往往只是根据凡个工作点处的铲斗工 作状态校验就确定了油缸的尺寸,而对油缸在整个垂直 工作面内的状态考虑不多。所以,有必要对挖掘机工作装 置油缸与挖掘力的关系进行讨论。 l挖掘机工作装置设计要求分析
全液压反铲挖掘机主要用于挖掘停机面以下的土 壤,挖掘土壤等级一般不超过IV级。对于小型机一般要 求其能够挖掘III级土壤。一般是希望在挖掘机前方停机 面以下的主要工作区内挖掘力大于等于挖掘阻力的面积 尽可能的大。
基于Matlab的挖掘机工作装置动力学建模与仿真
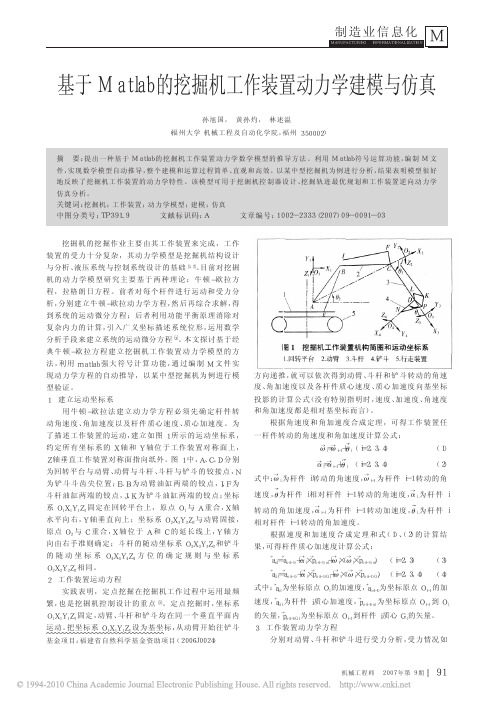
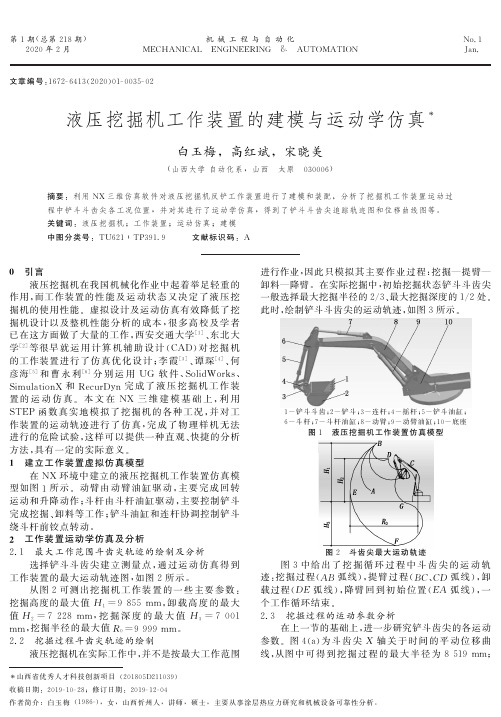
Y1Z1O1X1FIY2O2X2Z2JBAE15234Z4NX4Y4O4Z3Y3O3X3KLDP!3!2图1挖掘机工作装置机构简图和运动坐标系1.回转平台2.动臂3.斗杆4.铲斗5.行走装置!4C→→基金项目:福建省自然科学基金资助项目(2006J0024)""""""""""""""""挖掘机的挖掘作业主要由其工作装置来完成,工作装置的受力十分复杂,其动力学模型是挖掘机结构设计与分析、液压系统与控制系统设计的基础[1,2]。
目前对挖掘机的动力学模型研究主要基于两种理论:牛顿-欧拉方程,拉格朗日方程。
前者对每个杆件进行运动和受力分析,分别建立牛顿-欧拉动力学方程,然后再综合求解,得到系统的运动微分方程;后者利用功能平衡原理消除对复杂内力的计算,引入广义坐标描述系统位形,运用数学分析手段来建立系统的运动微分方程[3]。
本文探讨基于经典牛顿-欧拉方程建立挖掘机工作装置动力学模型的方法,利用matlab强大符号计算功能,通过编制M文件实现动力学方程的自动推导,以某中型挖掘机为例进行模型验证。
1建立运动坐标系用牛顿-欧拉法建立动力学方程必须先确定杆件转动角速度、角加速度以及杆件质心速度、质心加速度。
为了描述工作装置的运动,建立如图1所示的运动坐标系,约定所有坐标系的X轴和Y轴位于工作装置对称面上,Z轴垂直工作装置对称面指向纸外。
图1中,A、C、D分别为回转平台与动臂、动臂与斗杆、斗杆与铲斗的铰接点,N为铲斗斗齿尖位置;E、B为动臂油缸两端的铰点,I、F为斗杆油缸两端的铰点,J、K为铲斗油缸两端的铰点;坐标系O1X1Y1Z1固定在回转平台上,原点O1与A重合,X轴水平向右,Y轴垂直向上;坐标系O2X2Y2Z2与动臂固接,原点O2与C重合,X轴位于A和C的延长线上,Y轴方向由右手准则确定;斗杆的随动坐标系O3X3Y3Z3和铲斗的随动坐标系O4X4Y4Z4方位的确定规则与坐标系O2X2Y2Z2相同。
基于MatlabSimMechanics的机械结构仿真技术研究
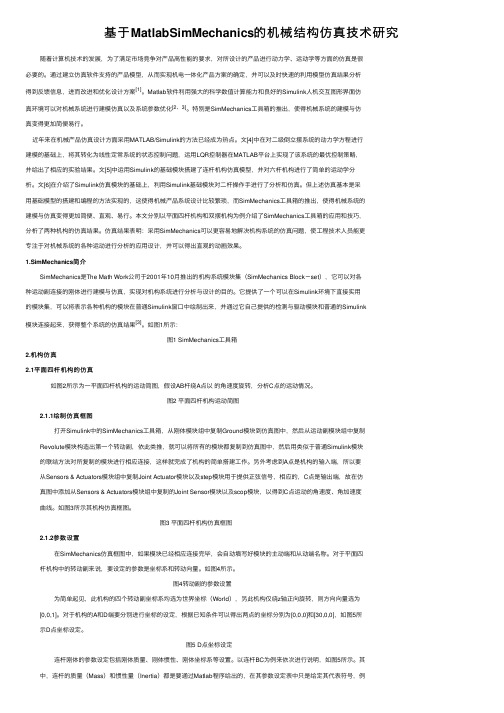
基于MatlabSimMechanics的机械结构仿真技术研究随着计算机技术的发展,为了满⾜市场竞争对产品⾼性能的要求,对所设计的产品进⾏动⼒学、运动学等⽅⾯的仿真是很必要的。
通过建⽴仿真软件⽀持的产品模型,从⽽实现机电⼀体化产品⽅案的确定,并可以及时快速的利⽤模型仿真结果分析得到反馈信息,进⽽改进和优化设计⽅案[1]。
Matlab软件利⽤强⼤的科学数值计算能⼒和良好的Simulink⼈机交互图形界⾯仿真环境可以对机械系统进⾏建模仿真以及系统参数优化[2、3]。
特别是SimMechanics⼯具箱的推出,使得机械系统的建模与仿真变得更加简便易⾏。
近年来在机械产品仿真设计⽅⾯采⽤MATLAB/Simulink的⽅法已经成为热点。
⽂[4]中在对⼆级倒⽴摆系统的动⼒学⽅程进⾏建模的基础上,将其转化为线性定常系统的状态控制问题,运⽤LQR控制器在MATLAB平台上实现了该系统的最优控制策略,并给出了相应的实验结果。
⽂[5]中运⽤Simulink的基础模块搭建了连杆机构仿真模型,并对六杆机构进⾏了简单的运动学分析。
⽂[6]在介绍了Simulink仿真模块的基础上,利⽤Simulink基础模块对⼆杆操作⼿进⾏了分析和仿真。
但上述仿真基本是采⽤基础模型的搭建和编程的⽅法实现的,这使得机械产品系统设计⽐较繁琐,⽽SimMechanics⼯具箱的推出,使得机械系统的建模与仿真变得更加简便、直观、易⾏。
本⽂分别以平⾯四杆机构和双摆机构为例介绍了SimMechanics⼯具箱的应⽤和技巧,分析了两种机构的仿真结果。
仿真结果表明:采⽤SimMechanics可以更容易地解决机构系统的仿真问题,使⼯程技术⼈员能更专注于对机械系统的各种运动进⾏分析的应⽤设计,并可以得出直观的动画效果。
1.SimMechanics简介SimMechanics是The Math Work公司于2001年10⽉推出的机构系统模块集(SimMechanics Block-set),它可以对各种运动副连接的刚体进⾏建模与仿真,实现对机构系统进⾏分析与设计的⽬的。
基于SimulationX的液压挖掘机仿真研究
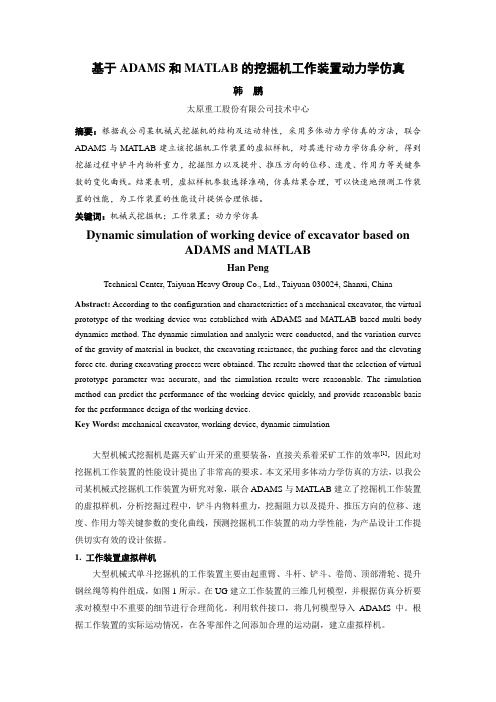
1 挖 掘 机 仿 真 模 型 的 建 立
1 变 量 泵 ; 2 主 溢 流 阀 ; 3 换 向 阀 ;4 二 次 溢 沉 一 一
5 动 臂左 液 压 缸 ;6 动 臂 右 液压 缸 一 一
收 稿 日期 :2 1-60 ;修 回 日期 :2 1 -82 0 00 —1 0 00 —7 作 者 简 介 :何 彦 海 (9 8) 男 , 北 井 陉 人 , 程 师 , 科 系统元 件的参 数 ,并 选
择需 要仿 真 的量 ,开 始仿真 分析 。
2 挖 掘 机 仿 真 模 型 的 运 行
进行 液压 系统 的仿 真分 析 。选 取常用 的开式 回路 、 阀 控 系统 ,油 缸 的上 升 和下降通 过换 向阀换 向实现 。 挖掘机 液压 系统通 常采用 多路 阀进 行控 制 ,此 处 仅 取 出其 中用 于 控制 挖 掘 机 动 臂 的两 联 建 立 系 统 模 型, 其液 压原理 图见 图 1 图 1中两个换 向阀分别 为多 。 路 阀中的两联 ,因动臂往 往需要 双液压 缸驱 动 ,实 际 使用 中根 据 需要 采 用 双 联 联合 先 导 液 压 方 式 进行 控 制 ,通过 先导控 制 实现动 臂双液压 缸 的联动 ;主溢 流
况时无法 有效应 对 ,往往无 法达 到设 计要 求 的工作能 力 。采用 虚拟样 机设 计 的方 法能够设 计 出满足 复杂工 作 要求 的挖 掘机 , 因此 这种方 法得 到越来越 高 的重 视 。 由于传 统 的微 分 方程和 差分方程 不能 够很好 地解 决 真实 系统 工作 中遇 到的复 杂工作环 境 ,因此 ,采用 大 规模专业 化 的仿 真 软件进行 虚拟样 机 的仿 真分 析是
基于虚拟样机的挖掘机工作装置的设计与仿真的开题报告

基于虚拟样机的挖掘机工作装置的设计与仿真的开题报告一、选题背景挖掘机是一个重要的矿山、建筑、道路等重要设备,其工作装置直接影响到其工作性能和效率。
为了提高挖掘机的工作效率和安全性,设计和优化挖掘机工作装置是非常重要的。
传统的挖掘机工作装置设计需要进行大量的试制和试验,耗时耗力,且成本较高。
随着计算机技术和虚拟仿真技术的不断发展,借助仿真软件进行挖掘机工作装置设计和优化的效率和可行性得到了极大提升。
因此,本次选题旨在基于虚拟样机开展挖掘机工作装置的设计与仿真,利用计算机仿真技术对挖掘机工作装置的设计进行有效的评估,为挖掘机工作装置的优化提供理论与技术支持。
二、选题意义1. 提高挖掘机工作性能和效率传统的挖掘机工作装置设计方法需要进行大量的试制和试验,成本高、效率低。
而基于虚拟样机的设计与仿真可以在计算机上进行快速、准确的仿真分析,理论和实践相结合,使得设计方案更加科学合理,能够有效提高挖掘机工作性能和效率。
2. 降低设计成本和周期借助虚拟样机技术,可以在计算机上进行设计和仿真,极大地降低了设计成本和周期。
避免了试制、试验环节,减少了原材料的浪费、节约了时间和人力成本。
3. 优化挖掘机工作装置结构通过模拟挖掘机工作过程中的变形、应力分布等关键参数的计算,分析不同工作状态下工作装置的性能特点,进而优化其设计,使其更加符合实际的工作需求。
三、研究内容和技术路线1. 挖掘机工作装置的结构设计借助现有的挖掘机工作装置结构和仿真软件,进行结构建模和优化设计。
2. 挖掘机工作过程的仿真模拟利用仿真软件对挖掘机工作过程进行建模和仿真。
对挖掘机工作装置在实际工作中的受力情况、承载能力、变形情况进行分析。
3. 挖掘机工作装置设计参数的优化基于仿真分析结果,优化挖掘机工作装置的设计参数,如工作装置的材料、结构形式等,使其更加符合实际应用需求。
4. 挖掘机工作装置实验验证对仿真优化后的工作装置进行实验验证,进一步验证仿真结果的准确性和可行性。
液压挖掘机工作装置的建模与运动学仿真
第1期(总第218期)2020年2月机械工程与自动化M E C HA N I C A L ㊀E N G I N E E R I N G㊀&㊀A U T OMA T I O NN o .1J a n .文章编号:1672G6413(2020)01G0035G02液压挖掘机工作装置的建模与运动学仿真白玉梅,高红斌,宋晓美(山西大学自动化系,山西㊀太原㊀030006)摘要:利用N X 三维仿真软件对液压挖掘机反铲工作装置进行了建模和装配,分析了挖掘机工作装置运动过程中铲斗斗齿尖各工况位置,并对其进行了运动学仿真,得到了铲斗斗齿尖追踪轨迹图和位移曲线图等.关键词:液压挖掘机;工作装置;运动仿真;建模中图分类号:T U 621ʒT P 391 9㊀㊀㊀文献标识码:A山西省优秀人才科技创新项目(201805D 211039)收稿日期:2019G10G28;修订日期:2019G12G04作者简介:白玉梅(1986G),女,山西忻州人,讲师,硕士,主要从事涂层热应力研究和机械设备可靠性分析.0㊀引言液压挖掘机在我国机械化作业中起着举足轻重的作用,而工作装置的性能及运动状态又决定了液压挖掘机的使用性能.虚拟设计及运动仿真有效降低了挖掘机设计以及整机性能分析的成本,很多高校及学者已在这方面做了大量的工作,西安交通大学[1]㊁东北大学[2]等很早就运用计算机辅助设计(C A D )对挖掘机的工作装置进行了仿真优化设计;李霞[3]㊁谭琛[4]㊁何彦海[5]和曹永利[6]分别运用U G 软件㊁S o l i d W o r k s㊁S i m u l a t i o n X 和R e c u r D y n 完成了液压挖掘机工作装置的运动仿真.本文在N X 三维建模基础上,利用S T E P 函数真实地模拟了挖掘机的各种工况,并对工作装置的运动轨迹进行了仿真,完成了物理样机无法进行的危险试验,这样可以提供一种直观㊁快捷的分析方法,具有一定的实际意义.1㊀建立工作装置虚拟仿真模型在N X 环境中建立的液压挖掘机工作装置仿真模型如图1所示.动臂由动臂油缸驱动,主要完成回转运动和升降动作;斗杆由斗杆油缸驱动,主要控制铲斗完成挖掘㊁卸料等工作;铲斗油缸和连杆协调控制铲斗绕斗杆前铰点转动.2㊀工作装置运动学仿真及分析2.1㊀最大工作范围斗齿尖轨迹的绘制及分析选择铲斗斗齿尖建立测量点,通过运动仿真得到工作装置的最大运动轨迹图,如图2所示.从图2可测出挖掘机工作装置的一些主要参数:挖掘高度的最大值H 1=9855m m ,卸载高度的最大值H 2=7228m m ,挖掘深度的最大值H 3=7001m m ,挖掘半径的最大值R 0=9999m m .2.2㊀挖掘过程斗齿尖轨迹的绘制液压挖掘机在实际工作中,并不是按最大工作范围进行作业,因此只模拟其主要作业过程:挖掘 提臂卸料 降臂.在实际挖掘中,初始挖掘状态铲斗斗齿尖一般选择最大挖掘半径的2/3㊁最大挖掘深度的1/2处.此时,绘制铲斗斗齿尖的运动轨迹,如图3所示.1-铲斗斗齿;2-铲斗;3-连杆;4-摇杆;5-铲斗油缸;6-斗杆;7-斗杆油缸;8-动臂;9-动臂油缸;10-底座图1㊀液压挖掘机工作装置仿真模型图2㊀斗齿尖最大运动轨迹图3中给出了挖掘循环过程中斗齿尖的运动轨迹:挖掘过程(A B 弧线),提臂过程(B C ㊁C D 弧线),卸载过程(D E 弧线),降臂回到初始位置(E A 弧线),一个工作循环结束.2.3㊀挖掘过程的运动参数分析在上一节的基础上,进一步研究铲斗齿尖的各运动参数.图4(a)为斗齿尖X 轴关于时间的平动位移曲线,从图中可得到挖掘过程的最大半径为8519m m ;图4(b)为斗齿尖Y轴关于时间的平动位移曲线,从图中可以看出挖掘过程的最大深度为3904m m,最大卸载高度为-3623m m(负号只表示在Y轴负方向).图3㊀挖掘循环过程的斗齿尖运动轨迹图4㊀斗齿尖X和Y轴平动位移曲线图5为斗齿尖平动速度幅值曲线.从图5中可以看出:工作装置从开挖点开始,速度逐渐增加并伴有波动;在进入平稳挖掘阶段后,速度变化平稳;在 提臂 ㊁ 卸载 过程,速度幅值相差不大;在降臂回到挖掘点的过程中,速度幅值最大,最大速度为3730m m/s.图6为斗齿尖X和Y轴平动加速度曲线,图中曲线突变处是由于作业过程交替时油缸制动引起的,所以在这些交替点会出现加速度的骤变,而在每一个作业中加速度是平稳变化的.3㊀结语本文首先利用N X完成了液压挖掘机工作装置的建模.其次,绘制了工作装置的最大运动轨迹图,并精确测量了挖掘高度㊁卸载高度㊁挖掘深度以及挖掘半径的最大值等.最后,参考挖掘机实际工况对工作装置的实际挖掘过程做了仿真,并绘制了铲斗斗齿尖的运动轨迹图,且分析了液压挖掘机工作装置挖掘过程中铲斗斗齿尖的平动位移㊁平动速度和平动加速度的曲线图.图5㊀斗齿尖平动速度幅值曲线图6㊀斗齿尖X和Y轴平动加速度曲线参考文献:[1]㊀郑家坤.基于虚拟样机的挖掘机工作装置的设计与仿真[D].西安:西安交通大学,2005:1G20.[2]㊀方良周,宋桂秋,李奎贤,等.M X80液压挖掘机仿真与优化[J].建筑机械,1998(7):17G20.[3]㊀李霞,王强.U G软件在挖掘机三维仿真设计中的应用[J].矿山机械,1999(5):9G22.[4]㊀谭琛,廖贵成.基于S o l i d W o r k s的液压挖掘机工作装置优化研究[J].煤矿机械,2019,40(1):57G58.[5]㊀何彦海.基于S i m u l a t i o n X的液压挖掘机仿真研究[J].机械工程与自动化,2010(6):159G160.[6]㊀曹永利,董致新.基于R e c u r D y n液压挖掘机工作装置动力学分析与仿真[J].机床与液压,2018,46(8):50G57.M o d e l i n g a n dK i n e m a t i c s S i m u l a t i o n o fW o r k i n g D e v i c e o fH y d r a u l i cE x c a v a t o rB A IY uGm e i,G A O H o n gGb i n,S O N GX i a oGm e i(A u t o m a y i o nD e p a r t m e n t,S h a n x iU n i v e r s i t y,T a i y u a n030006,C h i n a)A b s t r a c t:T h eb a c k h o ew o r k i n g d e v i c e o f t h e h y d r a u l i c e x c a v a t o rw a sm o d e l e d a n d a s s e m b l e du s i n g N X3Ds i m u l a t i o n s o f t w a r e.T h e w o r k i n gp o s i t i o no f t h eb u c k e t t o o t h t i p d u r i n g t h em o v e m e n t o f t h ew o r k i n g d e v i c e o f t h e e x c a v a t o rw a s a n a l y z e d,a n d t h e k i n e m a t i c s s i m u l a t i o nw a s p e r f o r m e d.T h e t r a j e c t o r y t r a c e a n dd i s p l a c e m e n t c u r v e o f t h eb u c k e t t o o t h t i p w e r e g i v e n.K e y w o r d s:h y d r a u l i c e x c a v a t o r;w o r k i n g d e v i c e;m o t i o n s i m u l a t i o n;m o d e l i n g63 机械工程与自动化㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2020年第1期㊀。
基于ADAMS和MATLAB的挖掘机工作装置动力学仿真
基于ADAMS和MATLAB的挖掘机工作装置动力学仿真韩鹏太原重工股份有限公司技术中心摘要:根据我公司某机械式挖掘机的结构及运动特性,采用多体动力学仿真的方法,联合ADAMS与MA TLAB建立该挖掘机工作装置的虚拟样机,对其进行动力学仿真分析,得到挖掘过程中铲斗内物料重力,挖掘阻力以及提升、推压方向的位移、速度、作用力等关键参数的变化曲线。
结果表明,虚拟样机参数选择准确,仿真结果合理,可以快速地预测工作装置的性能,为工作装置的性能设计提供合理依据。
关键词:机械式挖掘机;工作装置;动力学仿真Dynamic simulation of working device of excavator based onADAMS and MATLABHan PengTechnical Center, Taiyuan Heavy Group Co., Ltd., Taiyuan 030024, Shanxi, China Abstract: According to the configuration and characteristics of a mechanical excavator, the virtual prototype of the working device was established with ADAMS and MATLAB based multi-body dynamics method. The dynamic simulation and analysis were conducted, and the variation curves of the gravity of material in bucket, the excavating resistance, the pushing force and the elevating force etc. during excavating process were obtained. The results showed that the selection of virtual prototype parameter was accurate, and the simulation results were reasonable. The simulation method can predict the performance of the working device quickly, and provide reasonable basis for the performance design of the working device.Key Words: mechanical excavator, working device, dynamic simulation大型机械式挖掘机是露天矿山开采的重要装备,直接关系着采矿工作的效率[1],因此对挖掘机工作装置的性能设计提出了非常高的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
31铲・装・运本栏目编辑 严 瑾第 41 卷 2013 年第 2 期基于 SimMechanics 的挖掘机工作装置运动仿真分析白鹏伟,史青录,程结结,吴正明,钟 飞太原科技大学机械工程学院 山西太原 030024摘要:为了查找和检验挖掘机工作装置设计方案的问题与缺陷,利用 SimMechanics 工具箱对挖掘机工作装置作业过程进行运动仿真。
通过仿真快速绘制出包络图并验证其工作尺寸参数,使设计人员在设计阶段就可以判断设计方案的合理性。
关键词:SimMechanics;工作装置;包络图;运动仿真中图分类号:TU621 文献标志码:A 文章编号:1001-3954(2013)02-0031-04Simulation and analysis on motion of excavator manipulatorbased on SimMechanicsBAI Pengwei ,SHI Qinglu ,CHENG Jiejie ,WU Zhengming ,ZHONG FeiSchool of Mechnical Engineering, Taiyuan University of Science & Technology, Taiyuan 030024, Shanxi, ChinaAbstract :In order to find out the problems and defects in the design scheme of excavator manipulator,SimMechanics toolbox was used to simulate the motion of the excavator manipulator. After the envelop diagram being plotted rapidly through simulation, the operating parameters were verified. The method could make it possible for designers to judge the reasonableness of design scheme during designing process.Keywords :SimMechanics; manipulator; envelope diagram; motion simulation作者简介:白鹏伟,男,1986 年出生,硕士研究生,主要研究方向为机械与车辆动力学。
分析挖掘机工作装置的作业范围是其运动学的一个重要部分。
挖掘包络图可以反映挖掘机的作业范围,直观观测出挖掘机几何作业参数及相关性能[1]。
目前对于挖掘机工作装置的运动学分析,国内外学者一般采用作图法、矢量代数法以及杆组分析法等进行分析[2]。
这些方法都是先对机构进行反复的公式推导,再经人工计算或计算机编程后求解,既费时又费力。
为此,以某型号液压挖掘机为研究对象,在 SimMechanics 中建立了该机的运动学仿真模型。
以随液压缸长度变化而变化的构件相对转角作为输入激励,实现挖掘机包络图的快速绘制。
该方法无需进行复杂的公式推导及编程,大大简化了分析设计过程。
1 模型的建立1.1 SimMechanics 的建模步骤如同 Simulink 模型一样,SimMechanics 通过连接一系列相关的模块来表示一个机构,同时也可以作为一个子系统嵌入 Simulink 中,这样就可实现 Simulink 其他工具箱和 SimMechanics 的无缝连接。
SimMechanics 是一个模块库,建模环境仍然是在 Simulink 中,但它直接根据实际构件及其之间的关系来进行模块化建模。
利用 SimMechanics 建立挖掘机模型的步骤如下[3]:(1) 确定构建的固有属性、自由度数、约束及坐标系统;(2) 装配传感器和作动器,用来记录和初始化刚体运动,以及施加力或力矩;(3) 开始仿真,调用 Simulink 的求解器来计算系统的运动,并保持约束不变;(4) 在建模和仿真时,利用 SimMechanics 的可视化窗口进行机械系统可视化。
1.2 仿真模型的建立反铲液压挖掘机工作装置通常由动臂、斗杆、铲铲・装・运33铲・装・运本栏目编辑 严 瑾第 41 卷 2013 年第 2 期基本相符。
(a) t=247 s(b) t =6028 s图 5 不同仿真时间下的工作装置包络图Fig. 5 Envelope diagram of excavator manipulator at varioussimulation duration3 结语在 MATLAB /Simulink 的环境下,利用 SimMe-chanics 建模仿真功能,对液压挖掘机的工作装置进行建模,可较快地得到挖掘机挖掘包络图,准确验证了其工作尺寸,保证了设计的可靠性,大大提高了设计效率。
利用 SimMechanics 中的仿真可视化功能显示工作装置运行情况,可以直观地看到工作装置的干涉情况。
该模型有效提高了仿真效率,为分析液压挖掘机的作业性能和改进挖掘机工作装置的设计提供了一种合理有效的方法。
参 考 文 献[1] 林慕义,史青录. 单斗液压挖掘机 [M]. 北京:冶金工业出版社,2011:198-199.[2] 李杨民,谢存禧,王冀湘. 液压挖掘机工作装置动臂、斗杆机寸参数,而不考虑刚体的转动惯量、质心位置以及质量。
为了便于对铰接点激励模块的设置,选择工作装置的最大挖掘高度姿态为初始状态 (即动臂液压缸全伸,斗杆液压缸和铲斗液压缸全缩时的状态)。
对于 Revolute 模块,因为 3 个铰接点在 xy 平面内运动,所以选择 z 轴为旋转轴。
对于铰点激励模块,为了简化模型框架图,在 3 个铰接点激励模块处分别建立了一个子系统,其参数设置步骤基本相同。
以 Subsystem 1 为例进行说明,用 Sine Wave 模块输入激励,其信号表达式为O (t )=Amp ×sin(Freq ×t +Phase )+Bias 。
式中:Amp =α/2,α 可由式 (2) 求得;Phase =0;Bias =-Amp 。
因为初始位置仰角最大,需偏移—个幅值[5]。
2.3 模型的运行与结果分析SimMechanics 支持自定义的 MATLAB 图形处理窗口进行可视化。
该工具以透视图的方式显示挖掘机的运动,便于直观地观察模型建立及仿真是否正确。
本次仿真利用封闭的壳体来对各个工作装置进行描述,为了能够在仿真过程中进行动画演示,需在配置 Configuration 参数时,在 SimMechanics 选项中选中“Animate machine during simulation check”复选框。
图 4 即为利用壳体对挖掘机工作装置的可视化描述。
图 4 利用壳体进行的可视化描述Fig. 4 Visualization by using case为了使铲斗齿尖历经所有工作区域,仿真时间要设置得足够长,此次仿真时间设定为无限长,即为 inf。
图 5 为仿真时间 t =247 s 和 t =6028 s 时绘制出的挖掘机工作装置包络图。
由图 5 可以看出,当仿真时间足够长时,铲斗齿尖理论上将历遍包络图边界内的所有区域。
从 Workspace 中可以看到,最大挖掘高度为 9.16 m,最大挖掘深度为 7.79 m,最大挖掘半径为 10.31 m。
通过与实例进行比较,发现仿真结果与实际情况铲・装・运2-DOF 铰接轮式越野挖掘机功率匹配及牵引性能设计赵庆波,刘昕晖,陈 伟,姚 智吉林大学机械科学与工程学院 吉林长春 130025摘要:确定了一种 2-DOF 铰接轮式越野挖掘机行走系统中发动机-泵功率匹配区域和实现原理,并分析了变量泵-变量马达系统工作参数。
研究了影响车辆爬坡能力的因素,合理设计了最大牵引力和分动箱传动比。
在此基础上设计出该挖掘机在不同工作模式下的牵引特性,为该车行走系统的设计和分析提供了依据。
关键词:轮式越野挖掘机;2-DOF 铰接;功率匹配;牵引性能;行走系统中图分类号:U462.3+1 文献标志码:A 文章编号:1001-3954(2013)02-0034-04Design on power matching and traction performanceof a 2-DOF articulated wheeled off-road excavatorZHAO Qingbo,LIU Xinhui,CHEN Wei,YAO ZhiCollege of Mechanical Science & Engineering, Jilin University, Changchun 130025, Jilin, ChinaAbstract:The engine-pump power matching area and realization method of the driving system of a 2-DOF wheeled off-road excavator were determined, and operation parameters of the variable displacement pump and variable displacement motor system were analyzed. Moreover, the factors affecting the grade ability of the excavator were studied, and the maximum traction force and the gear ratio of the transfer case were designed.And then, the traction performance of the wheeled off-road excavator in various operation modes was designed.The study provided basis for the design and analysis of the excavator driving system.Keywords:wheeled off-road excavator; 2-DOF articulated; power matching; traction performance; driving system地震、泥石流等灾害发生后,由于受灾区的地形复杂和环境恶劣的限制,普通救援机械无法快速进入受灾区实施抢险。