引信安全系统新型加速度传感器原理装置的设计
加速度传感器测速原理及电路图
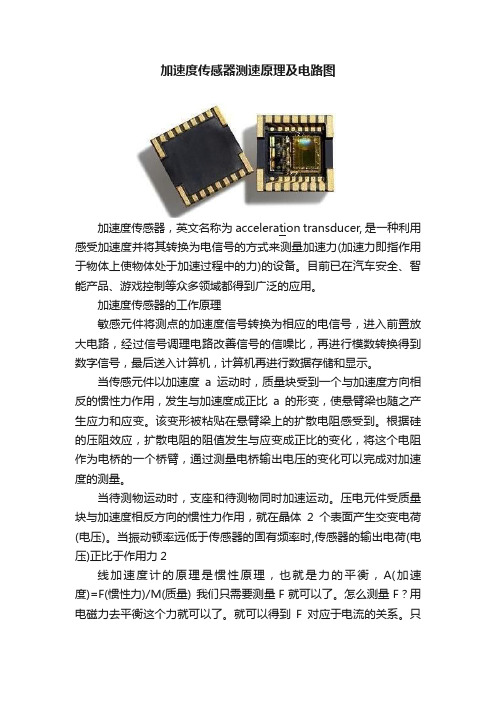
加速度传感器测速原理及电路图加速度传感器,英文名称为acceleration transducer, 是一种利用感受加速度并将其转换为电信号的方式来测量加速力(加速力即指作用于物体上使物体处于加速过程中的力)的设备。
目前已在汽车安全、智能产品、游戏控制等众多领域都得到广泛的应用。
加速度传感器的工作原理敏感元件将测点的加速度信号转换为相应的电信号,进入前置放大电路,经过信号调理电路改善信号的信噪比,再进行模数转换得到数字信号,最后送入计算机,计算机再进行数据存储和显示。
当传感元件以加速度a运动时,质量块受到一个与加速度方向相反的惯性力作用,发生与加速度成正比a的形变,使悬臂梁也随之产生应力和应变。
该变形被粘贴在悬臂梁上的扩散电阻感受到。
根据硅的压阻效应,扩散电阻的阻值发生与应变成正比的变化,将这个电阻作为电桥的一个桥臂,通过测量电桥输出电压的变化可以完成对加速度的测量。
当待测物运动时,支座和待测物同时加速运动。
压电元件受质量块与加速度相反方向的惯性力作用,就在晶体2个表面产生交变电荷(电压)。
当振动顿率远低于传感器的固有频率时,传感器的输出电荷(电压)正比于作用力2线加速度计的原理是惯性原理,也就是力的平衡,A(加速度)=F(惯性力)/M(质量) 我们只需要测量F就可以了。
怎么测量F?用电磁力去平衡这个力就可以了。
就可以得到F对应于电流的关系。
只需要用实验去标定这个比例系数就行了。
当然中间的信号传输、放大、滤波就是电路的事了。
加速度传感器自然是对自身器件的加速度进行检测。
其自身的物理实现方式咱们就不去展开了,可以想象芯片内部有一个真空区域,感应器件即处于该区域,其通过惯性力作用引起电压变化,并通过内部的ADC 给出量化数值。
加速度传感器的应用多数加速度传感器是根据压电效应的原理来工作的所谓的压电效应就是'对于不存在对称中心的异极晶体加在晶体上的外力除了使晶体发生形变以外,还将改变晶体的极化状态,在晶体内部建立电场,这种由于机械力作用使介质发生极化的现象称为正压电效应 '。
课程设计(论文)—应变式加速度传感器设计
一.传感器设计1、应变式加速度传感器简介能感受规定的被测量并按一定规律转换成可用信号输出的器件或装置,称为传感器,通常由敏感元件和转换元件组成。
应变式加速度传感器是一种低频传感器,由弹性梁,质量块,应变片及电桥等组成,质量块在加速度作用下,产生惯性力使弹性梁变形,引起应变片阻值发生变化,通过电桥来获取信号,是车辆振动测量常用传感器。
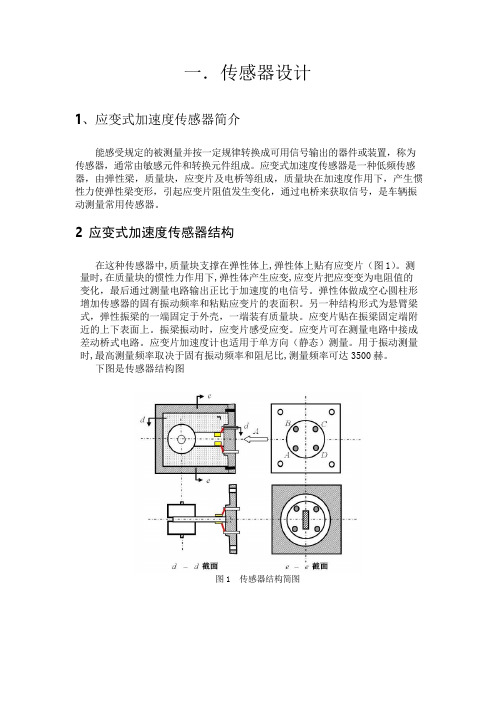
2应变式加速度传感器结构在这种传感器中,质量块支撑在弹性体上,弹性体上贴有应变片(图1)。
测量时,在质量块的惯性力作用下,弹性体产生应变,应变片把应变变为电阻值的变化,最后通过测量电路输出正比于加速度的电信号。
弹性体做成空心圆柱形增加传感器的固有振动频率和粘贴应变片的表面积。
另一种结构形式为悬臂梁式,弹性振梁的一端固定于外壳,一端装有质量块。
应变片贴在振梁固定端附近的上下表面上。
振梁振动时,应变片感受应变。
应变片可在测量电路中接成差动桥式电路。
应变片加速度计也适用于单方向(静态)测量。
用于振动测量时,最高测量频率取决于固有振动频率和阻尼比,测量频率可达3500赫。
下图是传感器结构图图1传感器结构简图Ebh H = R - R2- ⎪3 应变式加速度传感器特点这种结构灵敏度高,但体积较大,实际应用中需要硅油提供大的阻尼力应变式振动传感器的主要优点是低频响应好,可以测量直流信号(如匀加速度)。
4.计算设计:设计步骤根据设计指标估计如下结构参数: 梁长度:L (mm):11 梁宽度:b (mm):5 梁厚度:h (mm):0.5 质量块半径:r (mm):3 质量块厚度:c (mm):4 许用应力系数取:0.55;梁根部最大应变:ε max≤400 (μ ε )。
基本原理:质量块 M 在加速度 a 作用下产生惯性力: F = Maa梁在惯性力的作用下产生应变: ε = 6Lx x2Fa应变引起应变片阻值变化Δ R ,电桥失去平衡而输出电压,通过测量电压可求得 加速度。
计算梁的最大挠度挠度反映梁质量块的活动空间⎛ B ⎫2 ⎝ 2 ⎭(mm) w = ( R - H ) - (c + 0.5h) (mm)wmax< w 0(mm)6x=1.5929⨯ 10 -4 (ε/g ) x =3.1857e-006(ε/g ) Ebh 2如图所示,代入 R=7,B=6,c=4,h=0.5,得 H= 6.7544e-004mm, w =0.0021mm壳体质量: m =壳体体积 ⨯ 壳体材料密度 0质量块质量: m =质量块体积 ⨯ 质量块材料密度1弹性梁质量: m = 梁体积 ⨯ 梁材料密度(g) 2 硅油质量: m = 充油空间 ⨯ 硅油密度3质量块等效质量: M = m +m2(kg )1由上面给出的数据,可得 m =1.8g , m =0.216g12得 M=0.0105kg 。
加速度传感器工作原理

加速度传感器工作原理
加速度传感器是一种能够测量物体加速度的装置。
它的工作原理基于牛顿第二定律,即当一个物体受到外力作用时,它会产生加速度。
加速度传感器利用微小的电子元件,例如微机电系统(MEMS)加速度计或压电晶体,来检测物体的加速度。
在MEMS加速度计中,通常采用质量悬挂在弹簧上的结构。
当物体受到加速度时,惯性将使质量相对于弹簧产生位移。
这种位移可以通过装置上的微小电容或电阻来检测。
当物体加速度改变时,质量相对于弹簧的位移也会随之改变,从而导致电容或电阻的变化。
另一种常见的加速度传感器是基于压电效应工作的。
压电传感器由具有压电性质的晶体制成。
当物体受到加速度时,晶体会产生电荷。
这些电荷可以通过电极测量,从而确定加速度的大小和方向。
加速度传感器通常与其他传感器(如陀螺仪)结合使用,以提供更全面的运动测量。
它们广泛应用于许多领域,包括汽车安全系统、移动设备、航空航天等。
《2024年采用MEMS加速度传感器的边坡稳定安全监测系统设计》范文

《采用MEMS加速度传感器的边坡稳定安全监测系统设计》篇一一、引言边坡稳定是工程建设和自然环境中的重要问题,其稳定性直接影响着人民生命财产的安全。
随着科技的发展,边坡稳定安全监测系统逐渐成为保障边坡稳定的重要手段。
本文将介绍一种采用MEMS(微机电系统)加速度传感器的边坡稳定安全监测系统设计,以提高边坡稳定的监测精度和效率。
二、系统设计概述本系统采用MEMS加速度传感器,通过实时监测边坡的微小振动和变形,实现对边坡稳定的实时监测和预警。
系统主要由MEMS加速度传感器、数据采集模块、数据处理与分析模块、预警模块以及用户界面等部分组成。
三、系统硬件设计1. MEMS加速度传感器:采用高精度、低噪声的MEMS加速度传感器,具有体积小、重量轻、功耗低等优点,可实时监测边坡的微小振动和变形。
2. 数据采集模块:负责采集MEMS加速度传感器的数据,并将其转换为数字信号,以便后续处理。
3. 数据处理与分析模块:对采集到的数据进行处理和分析,包括信号滤波、数据转换、特征提取等,以获取边坡的稳定状态。
4. 预警模块:根据数据处理与分析模块的结果,判断边坡是否处于危险状态,并及时发出预警信息。
5. 用户界面:提供友好的人机交互界面,方便用户查看监测数据和预警信息。
四、系统软件设计系统软件设计主要包括数据采集与处理程序、数据处理与分析算法以及用户界面软件等部分。
数据采集与处理程序负责控制数据采集模块,并将采集到的数据传输到数据处理与分析模块。
数据处理与分析算法采用先进的信号处理和特征提取技术,对边坡的振动和变形进行实时监测和预警。
用户界面软件提供友好的人机交互界面,方便用户查看监测数据和预警信息。
五、系统应用与优势本系统可广泛应用于各类边坡稳定的监测和预警,如山区公路、铁路、水库大坝等工程的边坡稳定监测。
其优势在于:1. 采用高精度、低噪声的MEMS加速度传感器,提高了监测精度和效率。
2. 实时监测边坡的微小振动和变形,及时发现潜在的危险。
基于AD22280的引信电子加速度保险装置设计

一 ~
一
一
…
一 盛 峨 ~ . 尝 r 1 雪 一 寺 L
-
填 担 却建 盹 )
模 撂 栅造 崩} )
开 黄道 新 蠢
加 速度 模 块 电路 为A D 公 司 推荐 的 典型 电 路 。其 中c 2 、C 3 为 电源滤波 电容 ,C 4 为加速 度 电压输 出信 号滤波 电容,R 2 为 电源去耦 电阻。 s T 端为 外 部提 供 的测 试 电源 输入 端 , 当s T 端 输入5 V 电压 时 ,加速 度芯片 的x 0 U T 端将输 出约
I 一墨 竺 塑 塑 些 J
+
I
O
I 1
口
口
时舶 I
图9实验室模拟加速度及保险装置开关状态示意圈
- 3
. 2
I 系统定时汁数清零, 启
2 . 9 V 左右 的 电压 ,相当于 l O g  ̄ I 速度 对应 的 电
压值 。 单 稳 态 电 路主 要 采 用 7 4 A H C l 2 3 A 芯片 实
奎 '
' r Y
输出方渡信号, 输出 计时加 I
+
w .
<
’ Y
停 止方波 馅号 辅如 。 开关 接 进标 志置假
l
; 和 软件设计 。经过 实验 室验证和 多次外场试验 验证 ,证明 了电子加速度 保险装置 的有效性与 可靠 性,可完全替代原 有引信 的机械惯 性保险 装置 。同时 ,电子加速 度保险装置 的设计还为 j 飞行 体引信设计进 一步 朝电子化 、智能化方 向 i 的发展奠定 了基础 。
i
动 系统 计时
l
MEMS加速度传感器地原理与构造

MEMS加速度传感器地原理与构造MEMS加速度传感器(Microelectromechanical systems accelerometer)是一种用于测量物体加速度的装置,它基于微电子技术和微机械技术的结合而实现。
MEMS加速度传感器的原理是利用微机电系统技术制造出微小而灵敏的质量悬浮结构,并通过对这些悬浮结构的位移或应力进行测量来确定物体的加速度。
首先是丙烯酸胶悬浮结构,它由一个质量悬浮结构和一个用于固定的结构组成。
质量悬浮结构通常由硅制成,具有非常小的质量并能自由运动。
它的运动会受到物体的加速度影响,从而使得该结构发生位移或应力变化。
接下来是压电传感器,它位于质量悬浮结构上方的盖片上。
压电传感器由压电材料制成,当质量悬浮结构发生位移或应力变化时,会产生相应的压电电荷。
这些电荷会由传感器收集并转化为电压信号。
最后是电路及信号处理部分。
传感器收集到的电荷信号会通过一些电路进一步放大和处理,从而得到一个可以测量的模拟电压信号。
这个电压信号可以转化为数字信号,并通过计算机或其他设备进行进一步分析和处理。
MEMS加速度传感器的工作原理基于牛顿力学中的加速度定义。
当物体受到外力作用导致加速度发生变化时,质量悬浮结构会通过惯性产生位移或应力变化。
这些变化被传感器捕捉并转化为电信号,从而可以测量物体的加速度。
总结来说,MEMS加速度传感器通过微电子和微机械技术,利用质量悬浮结构位移或应力变化来测量物体加速度。
其构造包括丙烯酸胶悬浮结构、压电传感器、电路及信号处理部分等组成。
通过该传感器可以实现物体加速度的测量,并在各种应用领域发挥重要作用。
MEMS加速度传感器的原理与构造

MEMS加速度传感器的原理与构造
首先,感应电容是传感器的核心组件之一、它由两个金属电极构成,
其中一个静止不动,另一个则随物体的加速度而移动。
当质量块受到加速
度作用而发生位移时,两个金属电极之间的电容值会发生变化。
其次,质量块是传感器的测量载荷部分,它一般由一块金属块制成,
质量较大。
当外界加速度作用于物体时,质量块会发生位移,改变感应电
容之间的电容值。
再次,弹簧是连接质量块和感应电容之间的连接部分。
它一般由金属
材料制成,能提供足够的回复力和稳定性,使质量块能够在外界加速度作
用后恢复到初始位置。
最后,集成电路是用来处理和输出传感器信号的部分。
它负责将感应
电容的电容值变化转换为电压信号,并进行放大和滤波处理,最终输出为
可读的加速度值。
MEMS加速度传感器的工作原理是基于牛顿第二定律,即F=ma,其中
F为力,m为质量,a为加速度。
当外部加速度作用于质量块时,会产生
相应的力,从而导致质量块发生位移。
这个位移会改变感应电容之间的电
容值,从而通过集成电路进行处理和输出。
总的来说,MEMS加速度传感器通过感应电容、质量块、弹簧和集成
电路等组件的协同工作,能够测量物体在三轴上的加速度。
它具有体积小、功耗低和成本较低等优点,被广泛应用于各个领域。
基于AD22280的引信电子加速度保险装置设计

基于AD22280的引信电子加速度保险装置设计【摘要】介绍了AD公司的ADXL78系列加速度芯片的基本工作原理。
利用该系列的AD22280芯片设计了一种飞行体引信电子保险装置,使集成微机电(iMEMS)技术成功地应用于研制项目,改变了以往飞行体引信单纯依靠机械惯性保险装置工作的状况,并通过了多次实验室和外场试验验证。
结果表明该电子加速度保险装置具有很高的可靠性,可完全取代原有机械惯性保险装置。
此外,该设计还为飞行体引信进一步朝电子化、智能化方向的发展奠定了基础。
【关键词】iMEMS;加速度;引信;电子保险1.引言微型电子机械系统是一个迅速发展的多学科技术交叉的领域,利用半导体加工方法制作的微尺度的机械、流体、电子、光学及其它一些器件,常常同微电子电路集成在一起完成传感、信号处理、计算、控制和执行等功能。
随着引信系统智能化的趋势,机电和安全电子系统以其高度的信息化特点将逐步在引信设计中占主导地位,安全系统也是如此。
在某飞行体设计中,依据其所采用发动机的设计参数,我们设计了一种基于加速度传感器AD22280及其外围电路的电子加速度保险装置,通过感知飞行体在飞行过程中的加速度来控制点火回路的接通,经过数次试验证明了该设计的有效性与可靠性。
该电子加速度保险装置可取代原有的机械惯性保险装置。
2.基于AD22280的电子加速度保险装置设计2.1 AD22280介绍AD22280是AD公司生产的ADXL78系列中的一款低功耗、单轴加速度测量系统,可测试动态加速度和静态加速度(重力加速度)。
ADXL78系列是AD 公司第四代低成本、高性能,表面微机械加速度计。
其物理尺寸为5mm×5mm×2mm,8引脚陶瓷LCC封装,量程为±50g,全差分传感器,电路抗电磁干扰性能高。
带电或不带电情况下可承受极限加速度值为4000g,工作和贮存温度范围为-40~105℃。
图1为ADXL78功能模块图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
根 据 上述逻 辑所 构成 的安保 系统 , 信息 充 分 、 可靠 , 且便 于 实现定距解 除保 险。若配 以积分 电路 , 而
维普资讯
姚 竹 亭等 : 引信 安全 系统新 型加 速度 传 感器原 理装王 的设计
4 1
电阻应 变式传 感器 的 工作原理 是 以应 变效应 为基 础 , 特点 是测 量范 围广 、 度 高、 其 精 频率 特性好 , 其 缺点 是 在大应 变状 态下 具有 较大 的非线 性 , 出信号 微弱 , 干 扰能 力差 。对 于加 速 度信号应 变加速 度 输 抗
引 信 安 全 系 统 新 型 加 速 度 传 感 器 原 理 装 置 的 设 计
姚竹 亭 , 李
( . '学院 , 西 太原 华i r L 山
霆
00 5 ) 3 0 1
摘 要 : 细介绍 了作为 引信安全系统解除保险 信号之 一的新型加速度传感器原理装 置的 详
设计 。 并通过模 拟试验 。 实了该 电路的正确 性 。 证
关 键 词 : 信; 引 传感器 ; 系统 安全 中 图 分 类 号 :J4 文 献 标 识 码 : 文 章 编 号 :0819 (020 0 00 T 3 A 10—1420)104-5
0 引 言
随着 引 信系统 智 能化 的趋 势 . 机电 和全 电子 系统 以其 高 度 的信息 化特 点将 逐 步在 引信设 计 中 占主 导地位 , 安全 系统也 是 如此 。 利用单 片机 或数字 逻 辑 电路作为 信息 处理单 元 , 以适 当 的传 感器 , 配 以步 进 电机 或火 控逻 辑 电路为 执行 机构组 成安 全系统 。对 于 导弹 、 箭 弹等 弹种 , 火 选择 发射 飞行 过程 中的加 速
响应 差 , 电式加 速 度传感 器是 以压 电材料 为转 换 元件 , 出与加 速 度成 正 比的 电荷 或电 压量 的装 置 。 压 输
其输 出较应 变式 的 大、 量范 围广 、 测 自振 频 率高 、 寸重 量小 , 在经 老化 等处 理后 稳 定性 相 当高 , 尺 其 在精
度方 面也 有其 独到 之处 , 冲击 振动 测试 技术 中使 用广泛 的一种传 感器 。 是 弹 体加 速 度 的测量 采 用压 电式 加速 度传 感器 , 种 方 法 的优 点是 微 型化 制 造技 术 日益成 熟 . 如 这 例 EN VC 公司 的产 品重量 只有 5g 可 耐 1 DE O , O万个 g的 冲击 , 我们 已有 多次在 弹上 使用 的经 验 . 续 电 后 路 的设 计也 较为成 熟 。
传感 器 的低 频响应 好 , 其包 括电阻 放大 器 在内 的系统 的稳定 性 高 , 适用 于测量 小 的加速 度信号 。
压 阻式 传感器 是利 用压 阻效应 制 成 的 , 压阻 式加 速度传 感器 与应 变式 加速传 感器 相 比, 具有 重量 较
轻、 体积较 小 , 频率响应 较 高 , 出较大 的特点 , 输 且其低 频特 性好 , 以用来铡 量零 频加 速度 , 可 但其温 度稳
定性差。
压 电式 传 感器 是 一种 典型 的 自发 电式传 感器 , 它是 以某 些晶 体受 力后 在其 表 面 产生 电荷 的压 电效 应 为 转换原 理 的传感器 。 具有 使用频 带 宽 、 敏度 高 、 噪 比高 、 构简单 、 作可靠 的优 点 , 其 灵 信 结 工 但其低 频
由 于传 感 器 能够 连 续 地 获 取 环 境 信 息 , 对 保 险 逻辑 设 计 来 说 . 但 可 则 不 以利 用 信息 的幅值 特 征 , 且 可 以使 用 而 其 过 程 特 征 和时 序 特 征 。例 如 导 弹 、 火
—r二 J
与 电 路
誊 囊H
+ lj 毒
—
维普资讯
第2 4卷第 1期
200 2年 3月
探 洲 与 控 制 学 报 J u n lo tcin 8 n r l o r a fDee t L o Co to
Vo1 2 . .1 . 4 No Ma .0 2 r 20
箭 弹 等 弹种 在 发射 时 的加 速度 , 量值 大
且 持 续 时 间 长 , 勤 务 过 程 中 , 要 同 在 若 时 达 到 同 样 的 量级 和 时 间 的 可 能 性 则
掣 释
图 1 冗棠保险逻辑原理框图
礅乎 其 微 。因此 , 在逻 辑设 计时 , 可利 用加 速度 的 幅值 作 为 阈值 , 且利用 时窗作 为持 续时 间的 阁值 , 并 成
则 可 向发 火控制 、 导航 和 制导 等系统 提供距 离 信息
2 弹体 加 速 度 的测 量
2 1 加 速 度 传 感 器 的 选 择 .
目前 最常 使用 的加速 度传 感器 主要有 三类 : 电阻应 变式传 感 器 、 阻式传 感器 和压 电式 传感 器 。 压
・ 收 稿 日期 :0 10 一 5 20 —I0 基盘项 目: 国防科技预 研基 盒项 目资助 (8 54 5B 4 1 9 J. . . QO O ) 作 者 简 介 竹 亭 (9 7 ) 女 。 姚 1 6 一 , 山西 太 原 人 , 剐教 授 . 士 生 . 博 从事 测 试 与控 制 方 面 的研 究 。
度和 飞行 速 度作 为确 认 弹体 发射 飞行 过程 的两个 环境 参数 , 不但 满 足冗余 保 险 的原 则 , 而且 容易 检 测 ,
同时 也可 以为发火 控制 等其 它系统 提供 信息 。 本文 根据 这种 思路 , 研究 了加速 度传感 器及 其适配 电路 的
逻 辑