散乱点云的孔洞识别和边界提取算法研究
基于虚拟格网的建筑物点云轮廓线自动提取

建筑物作为城市的重要组成部分,其轮廓线的自动提取对于点云测图、城市空间分析、建筑物三维建模等具有重要的应用价值。
长期以来,建筑物轮廓线的提取一直是测绘、遥感学者的研究重点之一。
早期建筑物轮廓线的提取主要是基于遥感影像立体测图等方式进行,虽然获取结果精度较高,但工序复杂,周期长,成果的现势性难以保证[1-3]。
而目前城市发展迅速,面貌日新月异,如何快速、自动地获取与更新城市建筑信息是目前亟需解决的问题。
具有三维数据采集能力的机载激光雷达(Light Detection And Range,LiDAR)技术的出现,为3D建筑物轮廓线的快速获取提供了新的手段。
对此,已有许多学者针对LiDAR数据开展建筑物轮廓线的提取研究,如尤红建等[4]设计了一种基于LiDAR距离影像的建筑物边缘自动提取方法。
该方法在点云滤波的基础上,利用地面点与非地面点生成数字表面模型(Digital Surface Model,DSM)和数字高程模型(Digital Elevation Model,DEM)差值运算实现建筑物区域分割,然后利用拉普拉斯(Laplace)算子进行建筑物边界提取,并采用最小均方差逼近以及基于主方向的正交化完成建筑物轮廓线基于虚拟格网的建筑物点云轮廓线自动提取徐景中,马丽娜武汉大学遥感信息工程学院,武汉430079摘要:在分析现有轮廓线提取方法不足的基础上,提出基于虚拟格网的建筑物轮廓线自动提取方法。
该方法利用建筑物点云生成虚拟格网并进行二值填充;采用邻域分析方法进行边界格网的标记与追踪;为了避免边界追踪错误,设计了基于方向的单边缘格网抑制方法及基于距离的连接关系调整方法以改善提取结果质量;根据格网追踪结果,从原始建筑物点云中提取真实轮廓点以保持原始建筑物轮廓形态;采用随机抽样一致性估计及最小二乘拟合方法进行轮廓线规则化处理,实现建筑物轮廓线的自动提取。
实验结果表明,该方法能快速从建筑物点云中提取轮廓线,可为建筑物轮廓线的自动提取提供一种可行的解决方案。
Geomagic讲义整理
Geomagic studio 讲义目录1. 逆向工程概述 2. Geomagic studio 软件及流程简介 3. Studio 入门学习 4. 涵盖各个阶段处理技术—甲壳虫车的逆向工程 5. 点阶段---点云编辑 6. 点云数据注册&合并 7. 多边形基本编辑命令 8. 多边形高级阶段 9. 基本曲面创建(探测曲率)1 10. 基本曲面创建(探测曲率)2 11. 高级曲面编辑 12. 探测轮廓线的曲面处理 13. Fashion 基础阶段 14. 创建 3D 特征1一、逆向工程概述1.1 逆向工程定义 逆向工程(Reverse Engineering,RE)也称反求工程,它是相对传统的设计而言。
是从一个存在的零件或原型入手,首先对其进行数字化处理,然后进行数据处理、曲 面重建、构造 CAD 模型等,最后制造出产品的过程。
逆向工程技术能快速建立新产品的 数据化模型,大大缩短新产品研发周期,提高企业产品设计和生产效率。
仿制,改制产品二维图样,技术文P仿制、改制产品CAD 模型重构DM系统制作系统 CAM快速原型 RP采集、处理 实物或模型模具产品样件新产品图 1.1 逆向工程流程图 1.2 逆向工程与正向工程的区别传统的产品设计一般都是“从无到有”的过程,设计人员首先构思产品的外形、性能以 及大致的技术参数等,再利用CAD建立产品的三维数字化模型,最终将模型转入制造流 程,完成产品的整个设计制造周期,这样的过程可称为“正向设计”。
而逆向工程则是一个 “从有到无”的过程,就是根据已有的产品模型,反向推出产品的设计数据,包括设计图纸 和数字模型。
其各自的流程如下图所示:产品功能设计图纸 CAD 模检查制造最终产品不满意 图 1.2 传统工业产品造型流程2已存在零件零件数字化 CAD 模检查图纸不满意最终产品制造1.3 逆向工程的应用图 1.3 逆向工程造型流程逆向工程已成为当今 CAD/CAM 领域内研究的热点之一。
点云隐藏点去除算法

点云隐藏点去除算法1.引言1.1 概述概述:点云隐藏点去除算法是一种用于处理点云数据中存在的遮挡点和噪声点的技术。
遮挡点是指在真实场景中被其他物体或者环境所遮挡的点,而噪声点则是由于传感器误差或其他因素引起的无效点。
点云数据是一种三维空间中离散点的集合,通常通过激光扫描或摄像机等传感器采集。
然而,在采集过程中,由于物体的几何形状和相对位置的影响,点云数据中常常存在遮挡点。
这些遮挡点会导致点云数据的不完整性和噪声,影响后续处理和分析的准确性。
为了解决这个问题,研究者们提出了各种点云隐藏点去除算法。
这些算法致力于识别和去除点云数据中的遮挡点和噪声点,从而得到更准确和可靠的点云数据。
在本文中,将主要介绍和探讨几种常用的点云隐藏点去除算法。
这些算法包括基于几何形状的算法、基于统计模型的算法以及深度学习方法等。
基于几何形状的算法通常利用点云数据中点的坐标和周围点之间的关系来进行遮挡点的检测和去除。
这些算法可以通过计算点的密度、曲率或投影等特征来判断点是否被其他物体或环境所遮挡。
基于统计模型的算法则通过对点云数据进行统计分析和建模,来识别和去除遮挡点和噪声点。
这些算法利用点云数据的统计特征,如点的分布、聚类等来进行分析和处理。
另外,深度学习方法在点云隐藏点去除算法中也得到了广泛的应用。
通过使用深度学习模型对点云数据进行学习和训练,可以实现自动化的遮挡点检测和去除。
通过探讨和比较这些点云隐藏点去除算法,我们可以更好地理解它们的优缺点和适用场景,并为点云数据的后续处理和应用提供有效的参考和指导。
在未来的研究中,我们还可以探索更多创新的算法和方法,以提高点云隐藏点去除的准确性和效率。
1.2 文章结构文章结构部分的内容可以描述文章的整体结构和各个部分的内容概要,可以参考以下写法:文章结构:本文主要分为三个部分,包括引言、正文和结论。
引言部分介绍了本文主题的概述、文章结构及目的。
正文部分分为两个子章节,分别介绍了点云隐藏算法和点云去除算法。
面向地形构建的点云孔洞修补

面向地形构建的点云孔洞修补柳方明;张洪彪;李俊利【摘要】由于三维激光扫描仪在获取点云数据时,受设备自身、环境、目标物表面结构等复杂因素影响,其获取的点云数据往往存在局部孔洞,这对精确重建地形带来了巨大的挑战。
本文针对真实地形点云数据存在的孔洞,结合Delaunay三角剖分与Loop细分算法,解决了地形孔洞难以修补这一难题。
该算法首先连接距离最近的两点,根据Delaunay三角形外接圆特性,以外接圆半径增长的方式搜索三角形第3点,构建种子三角形。
随后对新生成边重复采用外接圆半径增长的方式构建新三角形,从而对所有散乱点云建立三角网拓扑结构,再以Loop细分的方式实现点云孔洞的修补,经算例验证,本文算法可用于实际地形孔洞修补。
【期刊名称】《电子世界》【年(卷),期】2015(000)023【总页数】2页(P106-107)【关键词】三角剖分;Loop细分;孔洞修补【作者】柳方明;张洪彪;李俊利【作者单位】武警工程大学研究生管理大队;武警工程大学研究生管理大队;武警工程大学研究生管理大队【正文语种】中文三维建模是计算机研究的热点之一,随着三维激光扫描仪的更新换代,三维激光扫描技术已经可以全天候、高效率、高精度的获取实体重建所需要的原始点云数据[1,2]。
近年来,随着国内外学者对点云三维建模研究的不断深入,在取得不少科研成果的同时,点云三维建模技术也开始广泛应用于逆向工程、医疗、古文物重建、工业锻造、城市主体三维场景建模、地形侵蚀监测等多个领域[3-5]。
在逆向工程中,高精度的三维建模可以缩短生产周期,并提高产品生产效率;在医疗领域里,高精度扫描的点云数据经建模后可进行脸部、牙齿、耳朵等的畸形矫正;在文物保护领域,对具有上千年历史的古文物的原型数字存储、复原中,三维激光扫描仪也有非接触、高精度等不可替代的优势。
中华文化博大精深,古文物数不胜数,无数奇珍异宝,直接暴露在空气中展览,难免会对文物造成不可修复的损伤。
隐式曲面重建方法研究
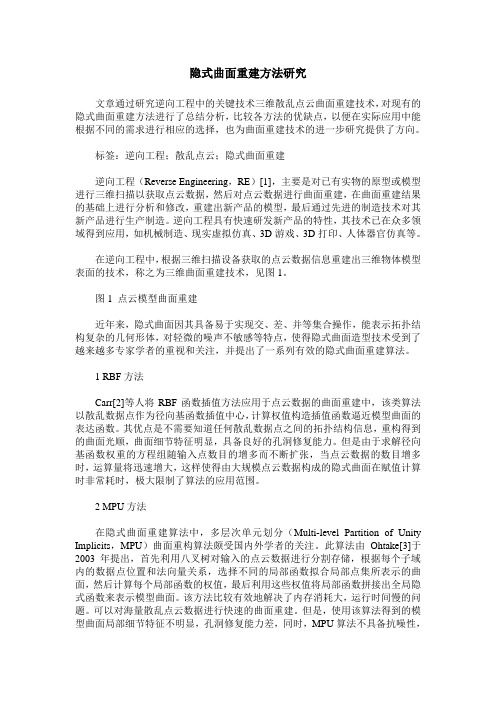
隐式曲面重建方法研究文章通过研究逆向工程中的关键技术三维散乱点云曲面重建技术,对现有的隐式曲面重建方法进行了总结分析,比较各方法的优缺点,以便在实际应用中能根据不同的需求进行相应的选择,也为曲面重建技术的进一步研究提供了方向。
标签:逆向工程;散乱点云;隐式曲面重建逆向工程(Reverse Engineering,RE)[1],主要是对已有实物的原型或模型进行三维扫描以获取点云数据,然后对点云数据进行曲面重建,在曲面重建结果的基础上进行分析和修改,重建出新产品的模型,最后通过先进的制造技术对其新产品进行生产制造。
逆向工程具有快速研发新产品的特性,其技术已在众多领域得到应用,如机械制造、现实虚拟仿真、3D游戏、3D打印、人体器官仿真等。
在逆向工程中,根据三维扫描设备获取的点云数据信息重建出三维物体模型表面的技术,称之为三维曲面重建技术,见图1。
图1 点云模型曲面重建近年来,隐式曲面因其具备易于实现交、差、并等集合操作,能表示拓扑结构复杂的几何形体,对轻微的噪声不敏感等特点,使得隐式曲面造型技术受到了越来越多专家学者的重视和关注,并提出了一系列有效的隐式曲面重建算法。
1 RBF方法Carr[2]等人将RBF函数插值方法应用于点云数据的曲面重建中,该类算法以散乱数据点作为径向基函数插值中心,计算权值构造插值函数逼近模型曲面的表达函数。
其优点是不需要知道任何散乱数据点之间的拓扑结构信息,重构得到的曲面光顺,曲面细节特征明显,具备良好的孔洞修复能力。
但是由于求解径向基函数权重的方程组随输入点数目的增多而不断扩张,当点云数据的数目增多时,运算量将迅速增大,这样使得由大规模点云数据构成的隐式曲面在赋值计算时非常耗时,极大限制了算法的应用范围。
2 MPU方法在隐式曲面重建算法中,多层次单元划分(Multi-level Partition of Unity Implicits,MPU)曲面重构算法颇受国内外学者的关注。
描点的平面散乱点云边界的提取算法

(!""# ) 文章编号 &""!B=88&B "%B""="B"8
! "#$% &’ !()&*#+,- ’&* .#/+#(( 0%)1 ’*&- 2(3$3* 2&#$+/ #$ .#/&*%1* 43/1% &$ 563$ 7&%1
8,&9 5,#(#$ :3$) ;# <#3& :1$,1 (I*,J6,K L,6M(1E6;- 7N >(17,*+;62E *,O >E;17,*+;62E, I*,J6,K !&""&@)
图&
最小凸边算法的一个示例
(! ) 连接最上面一点和最下面一点把整个方盒分为两个部 分: 左边部分和右边部分。 对于左边部分把最上面一点、 最下面一点分别与最左 (& ) 边一点各连接成一条线段。 把最左边一点和最上面一点的连线外面的所有点都求 (# ) 出来 (这些点横坐标介于最左面一点的横坐标和最上面一点的 横坐标之间, 纵坐标类似) , 并且把这些点中与此直线距离最远 分别连接点 ( 与最上面一点, 点求出来, 设距离最远点为点 ( , 点 ( 与最左面一点成两条直线 。 对 最 下 面 一 点 与 最 左 面 的 连 线, 求出其外面的点, 并且求出其中与此直线距离最远的点, 记 分别连接点 ) 与最左面的点和点 ) 与最下面的点各成 为点 ) 。
,
数据实例
这个实例是用碎纸片形成的黑白扫描图, 然后划分虚拟网
格, 然后把所得到的网格中的边界网格找出来, 形成边界网格 环,并且把每一个边界网格中的边界细化出来得到各段边界, 然后把这些段边界连接起来, 从而得到一条边界线。 图 # 是一个碎纸片的扫描图。 图 , 是把整个扫描图通过网格划分而得到的边界网格连 成的环。 计算机工程与应用
基于法向量和投影平面的点云特征提取方法

第23卷第3期重庆科技学院学报(自然科学版)2021年6月基于法向量和投影平面的点云特征提取方法贾丁凡谢晓尧刘嵩(贵州师范大学贵州省信息与计算重K实验室,贵阳550001)摘要:三维点云特征的提取,对于三维模型的表示、理解和识别都起着重要的作用。
为了提高点云特征提取的准确性和运算速度,提出了一种基于法向量和投影平面的特征提取方法。
根据矢量分布和聚类的性质提取轮廓点,使用矢量偏转角和距离对特征点进行排序,从而提取出点云特征。
在Mod-elNet数据集和三维激光扫描的佛像密集点云上进行实验,结果表明,基于法向量和投影平面的特征提取方法对物体的表面轮廓具有较好的特征识别度,可以提取更多的有效特征点,运行时间较短,运算效率较高。
关键词:三维模型;点云;特征提取;聚类;法向量中图分类号:TP391.4文献标识码:A文章编号:1673-1980(2021)03-0084-05利用3D测量技术可以获得物体的三维表面信息。
3D模型的特征提取,在数字模型的表示、理解和识别中起着重要作用[1](点云模型特征提取关键的问题是构造特征点识别算子。
目前,已经有许多学者对此进行了研究。
现有的检测算法可分为2类:一是基于曲率或表面变化的检测方法(比如刘致远等人提出的地下管廊特征线提取方法[2],首先使用LiDAR获得地下管廊原始点云数据,然后利用所提算法找出含有管廊整体轮廓信息的面状点云,最后基于PCA算法,通过设定角度阈值去提取轮廓数据。
二是基于法线量的检测方法(比如Wang L d hui等人提出的基于曲率和法向矢量的特征点检测方法[3],赵春海提出的基于法向量波动情况划分关键点的方法⑷。
为了提高点云特征提取的准确性和计算速度,现提出一种基于法向量和投影平面的特征提取方法。
首先根据矢量分布和聚类的性质提取轮廓点,然后根据矢量偏转角和距离对特征点进行排序,从而提取点云特征。
1特征提取方法首先,使用加权主成分分析法(WPCA)计算法线向量,由此构建投影平面。
点云数据滤波处理及特征提取研究
点云数据滤波处理及特征提取研究一、内容概述本文针对空间几何信息获取与处理的迫切需求,对点云数据滤波处理及特征提取进行了深入研究。
点云数据作为一种广泛应用的地理信息数据形式,在自动驾驶、无人机领域、建筑规划设计等领域具有重要的实际价值与应用前景。
由于点云数据噪声、异常值和复杂多变的表面特性,对其进行有效的滤波处理以及准确的特征提取变得尤为关键。
本文首先分析了点云数据滤波处理的研究现状,指出传统滤波方法如平面波滤波、高斯滤波等在面对复杂点云数据时存在局限性。
本文提出了一种基于非局部均值滤波的点云数据滤波方法。
该方法利用非局部均值滤波具有优异的去噪性能和对图像边缘保护的优点,对点云数据进行预处理,能够有效消除噪声干扰、降低异常值的影响、精确地提取出点云数据的本质特征。
本文对滤波后的点云数据进行了特征提取研究。
考虑到点云数据的多样性和复杂性,本文提出了一种结合局部纹理特征和全局形状特征的点云数据特征提取方法。
该方法利用局部纹理特征描述点云数据表面的细致特征,同时采用全局形状特征描述点云数据整体的分布特征。
通过将局部纹理特征与全局形状特征相结合,可以有效地提取出点云数据的本质特征,为后续的应用提供有力的支持。
本文针对点云数据滤波处理及特征提取问题,提出了一种基于非局部均值滤波和结合局部纹理特征与全局形状特征的特征提取方法。
该方法不仅具有较好的去噪和特征提取效果,而且在实际应用中具有较高的价值和广泛的应用前景。
本文的研究成果对于推动点云数据处理技术的发展和应用具有一定的借鉴意义。
1. 点云数据的定义和来源点云数据(Point Cloud Data)是一种由大量离散点的集合构成的三维数据结构,这些点通常来自于二维平面影像或者通过激光扫描、CT等设备获取的三维物体形状信息。
点云数据可以表示物体的表面形态、几何特征以及空间分布等多种信息,在计算机图形学、遥感、无人机控制、医学成像、制造业等领域具有广泛的应用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第3期
74
Machinery Design & Manufacture
2019 年 3 月
散乱点云的孔洞识别和边界提取算法研究
王春香,孟 宏,张 勇
(内蒙古科技大学 机械学院,内蒙古 包头 014010)
摘 要:针对逆向工程中已有孔洞识别算法执行效率低、孔洞边界点提取不完整等问题,提出一种新的基于 KD 树和 K 邻域搜索的点云孔洞识别及边界提取算法。该算法首先利用 KD 树建立散乱点云的拓扑关系。其次,计算点云密度、定义 距离阈值作为判别参数,利用 K 邻域搜索计算每个点与其 K 个邻域点的距离,距离大于阈值的点即为边界点。再次,采用 单坐标搜索法去除外边界,保留孔洞边界。最后,利用边界追踪算法获取完整的孔洞边界点。以涡轮叶片和挖掘机斗齿为 研究对象,对点云上的自然孔洞利用该算法进行识别。结果表明,该算法能够快速地识别出散乱点云中孔洞,并能完整地 提取出孔洞边界点,实用性强。 关键词:散乱点云;KD 树;K 邻域搜索;单坐标搜索法;边界追踪;孔洞边界 中图分类号:TH16;TP391.7 文献标识码:A 文章编号:1001-3997(2019)03-0074-03 DOI:10.19356/ki.1001-3997.2019.03.019
1 引言
在三维扫描过程中由于测量工具和技术的限制、待测模型 自身缺陷、光照或反射性等因素的影响,不可避免地会出现采样 点缺失,形成点云孔洞。点云的孔洞识别和边界提取作为孔洞修补、 曲面重构的首要环节,其重要性不言而喻。也正因为如此,点云的 孔洞识别也逐渐成为逆向设计领域最重要的研究课题之一。
文献[1-3]把点云连接成三角网格,然后通过网格的拓扑关系 识别出孔洞。三角网格化简洁、直观,但网格化过程中需要控制好 网格间隔的宽度,如果跨度设置不合适,在生成网格模型的过程 屮可能会忽略某些孔洞的存在。文献[4-5]将三维点云数据转换为图 像形式后提取边界。该方法能快速识别出点云边界,但存在错分 现象,且无法区分内外边界。文献[6]利用 KD 树建立散乱点云的空 间拓扑关系,通过判断最大夹角是否超过阈值来识别孔洞边界,
Research on the Hole Detection and Hole Boundary Extraction Algorithm for the Scattered Point Cloud
WANG Chun-xiang,MENG Hong,ZHANG Yong
(School of Mechanical Engineering,Inner Mongolia University of Science and Technology,Inner Mongolia Baotou 014010, China)
Abstract:For holes in the scattered point clouds,the existing hole detecting methods were usually fail either in efficiency or accuracy. In order to speed up the hole detecting process and extract the hole boundary points more completely,a novel hole detecting and hole boundary extractingalgorithm based on the KD tree and K-nearest neighbor algorithm was exploited. First, a KD tree was established to build up the relationship betweenany two scattered points. Second,a distance ance between each point and its K-nearest neighborhood were calculated. Provided any of these calculated results larger than the threshold,this point would be deemed as a boundary point. And then,single -axis search method wassuggested to remove the outer boundary and the internal hole boundary was left. Finally,a boundary tracing method was exploited to obtain the complete hole boundary points. The performance of the approach proposed in this paper was examined by applying it to two different point clouds from scanned objects,a turbine blade and a bucket of an excavator. The experimental results indicated that the suggested algorithm can detect holes directly from the unorganized pointsmore efficiently,and can extract the hole boundary more accurately. Key Words:Scattered Point Clouds;KD Tree;K Nearest Neighbor Algorithm;Single-Axis Search;Boundary Tracing; Hole Boundary