上传扫地机的智能控制系统设计
扫地机智能控制系统设计

碰撞检测采用霍尔元件 EW462,芯片的内部原理框图如图3-4所示,芯片的工作方式 如图3-5所示。芯片的供电电压范围为 4.5V~18V,灵敏度高,阻抗低,工作的最大输出 电流为 15mA。当芯片的正上方有S极磁场时,霍尔元件输出高电平,当元件偏离磁场 后,元件输出低电平。通过控制霍尔元件正上方的磁场极性,可以控制元件输出信号 的变化趋势。当极性相反时,元件在偏离磁场时为高电平,正对磁场时为低电平。
Part Two
采用单片微机控制器
单片微控器
本设计以AT89C51单 片机作为检测和控制核
心。是美国ATMEL公司 生产的低电压,高性能
CMOS 8位单片机。兼容 标准MCS-51指令系统,
片内置通用8位中央处理 器(CPU)和Flash存储 单元。
AT89C51 主要性能参数
1.与MCS-51产品指令系统完全兼容 2.有4K字节可重擦写Flash闪速存储器 3.有1000次的擦写周期 4.全静态操作:0Hz~24MHz 5.有128×8字节的内部RAM 6.有32个可编程I/O 口 7.有2个16位定时/计数器 8.有6个中断源 9.低功率空闲和掉电模式
AT89C51 引脚
VCC:电源电压 GND:接地 P0口:P0口是一组8位漏极开路型双向I/O,也即地址/数据总线复用口。 P1口:P1口是一个携带内部上拉电阻的8位双向I/O口,P1的输出缓冲级可驱 动(吸收或输出电流)4个TTL逻辑门电路。 P2口:P2口是一个带有内部上拉电阻的8位双向I/O口,P2的输出缓冲级可驱 动(吸收或输出电流)4个TTL逻辑门电路。 P3口:P3口是一组带有内部上拉电阻的8位双向I/O口,P3口输出缓冲级可驱 动(吸收或输出电流)4个TTL逻辑门电路。
智能扫地机器人控制系统设计
• 190•引言:随着信息化技术的不断发展,扫地机器人得到了广泛应用,扫地机器人的智能化水平也越来越高,通过将其机械结构进行优化,结合当前成熟的自动化控制技术,实现了机电一体的高度融合,为居家、办公等场所的环境卫生的高效清洁提供了极大方便。
本文通过分析扫地机器人的功能要求,结合较好的运行稳定性及适当的成本要求,提出,利用AT89C51单片机作为本系统的控制核心,采用当前成熟的传感器技术,并辅以无线遥控控制技术,在开发过程中采用仿真模拟、实际电路系统调试的开发路径,为本系统的开发与实现提供了成熟的技术方案与较短的开发周期。
1 系统整体结构本文主要讨论本系统的电路控制的实现过程,其电路整体结构如下图1所示。
由图1示,本系统利用8位单片机作为系统控制中心,辅以液晶显示电路、继电器控制电路、传感器电路、红外接收电路等外部电路,实现智能扫地机器人的障碍自动识别、方向切换等功能。
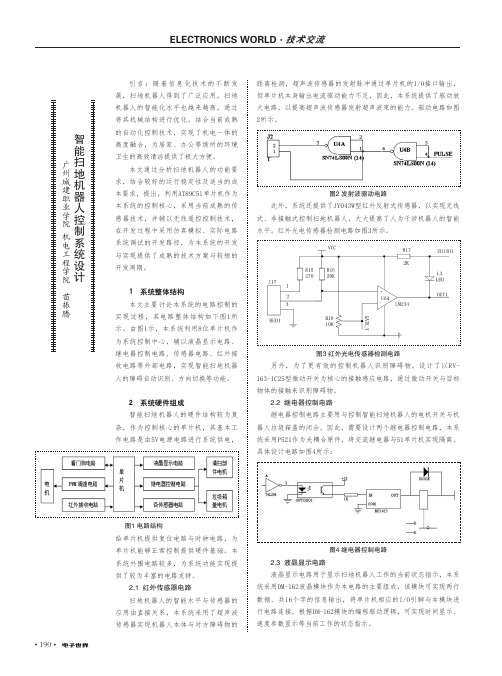
2 系统硬件组成智能扫地机器人的硬件结构较为复杂,作为控制核心的单片机,其基本工作电路是由5V电源电路进行系统供电,距离检测,超声波传感器的发射脉冲通过单片机的I/O接口输出,但单片机本身输出电流驱动能力不足,因此,本系统提供了驱动放大电路,以提高超声波传感器发射超声波束的能力。
驱动电路如图2所示。
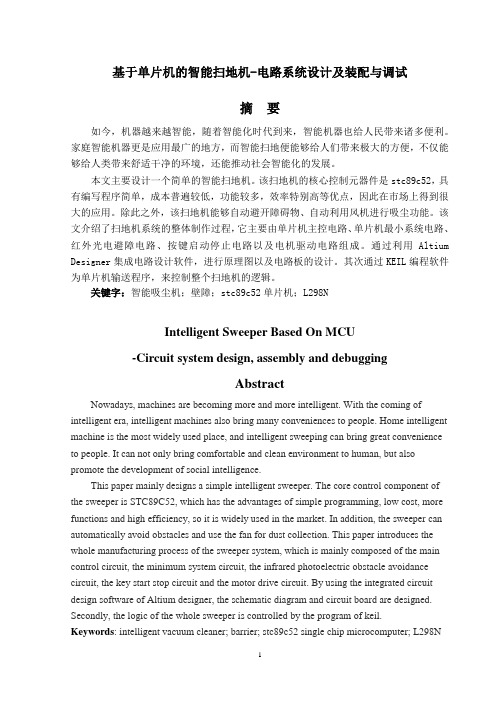
图2 发射波驱动电路此外,系统还提供了JY043W型红外反射式传感器,以实现无线式、非接触式控制扫地机器人,大大提高了人为干涉机器人的智能水平。
红外光电传感器检测电路如图3所示。
图3 红外光电传感器检测电路另外,为了更有效的控制机器人识别障碍物,设计了以RV-163-1C25型微动开关为核心的接触感应电路,通过微动开关与目标物体的接触来识别障碍物。
2.2 继电器控制电路继电器控制电路主要用与控制智能扫地机器人的电机开关与机器人垃圾箱盖的闭合。
因此,需要设计两个继电器控制电路,本系统采用P521作为光耦合原件,将交流继电器与51单片机实现隔离。
景区自动清扫车控制系统设计

景区自动清扫车控制系统设计随着人们生活水平的提高和休闲度假需求的增加,旅游业日益繁荣。
景区作为旅游目的地,不仅容纳了众多游客,也需要保持整洁和美观的环境。
为了提高景区的清洁程度和效率,自动清扫车成为了景区管理的重要工具。
本文将针对景区自动清扫车的控制系统进行设计。
一、控制系统的需求分析1.清扫效率:景区的清洁工作需要高效率的清扫车来完成,因此控制系统要求能够精确控制清扫车的路径和速度,以保证清扫的面积和深度。
2.导航定位:景区的道路复杂多样,需要控制系统具备良好的导航定位能力,能够识别和规划清扫车的行进路线,避免碰撞和迷路。
3.智能避障:景区中常常有各种障碍物,控制系统需要具备智能避障能力,能够自动识别并规避障碍物,提高清扫车的工作效率和安全性。
4.节能环保:为了降低成本和保护环境,控制系统需要具备节能环保功能,合理控制清扫车的能耗和排放,达到资源节约和环保的效果。
二、控制系统的设计方案1.定位导航系统:采用激光雷达和GPS组合的导航系统,通过激光雷达实时扫描周围环境,获取地形和障碍物信息,配合GPS定位系统实现清扫车的定位和路径规划。
2.传感器系统:利用红外传感器、超声波传感器和摄像头等传感器,实现障碍物检测、距离测量和环境监控功能,为清扫车的智能避障提供数据支持。
3.控制算法:设计专门的控制算法,实现清扫车的运动控制和清洁路径规划,同时考虑能耗和环保要求,合理分配清扫车的能量和资源,实现节能环保的效果。
4.通信模块:增加通信模块,实现清扫车与中央管理系统的实时通信,通过云平台实现远程监控和管理,提高景区管理的效率和便利性。
5.人机交互界面:设计直观友好的人机交互界面,方便操作人员对清扫车进行监控和控制,实时了解清扫车的状态和工作情况,保证清洁工作的正常进行。
三、系统的实施方案1.硬件设备:选择稳定可靠的激光雷达、GPS模块、传感器和通信模块等硬件设备,保证系统的稳定性和可靠性。
2.软件开发:开发清扫车控制系统的软件,包括定位导航算法、智能避障算法和能耗控制算法等,同时开发人机交互界面的软件,确保系统的功能和易用性。
智能清洁装置控制系统设计毕业设计论文

毕业设计论文智能清洁装置控制系统设计(系统软件)摘要随着信息技术的不断发展,各种产品的技术含量及复杂程度也越来越高,智能化的概念开始逐渐渗透到各行各业以及我们生活中的方方面面。
本文以智能计算机控制技术为理论基础,设计了一种以MSP430F149单片机为主控制器的智能清洁装置。
该装置能按照一定的行走模式对复杂的空间环境进行清扫,当遇到障碍物时它能启动避障程序绕开障碍物再按照原来的模式进行清扫工作。
如果地面上有台阶,它还能自动启动防摔落程序防止清洁装置被摔坏。
文章主要围绕它的这些功能进行系统设计以及相关功能软件的分析与设计。
在IAR EW430编译环境下编写系统程序,编译成功并下载到硬件系统中。
最终,本设计完成了智能清洁装置预期的功能,达到设计要求。
关键字:智能控制系统;扫地机器人;MSP430;路径规划Intelligent control system designof cleaning device(System software)AbstractWith the development of the information technology, the technological content and complexity of products are becoming better than before. The concept of intelligent gradually began to infiltrate into all walks of life and we all aspects of the life.The paper based on the intelligent control technology, designing a intelligent cleaning device by MSP430F149 MCU which was the master controller of the system. The device can clean complicated space according to establish walking pattern. When faced with obstacles it can start the obstacle avoidance procedures around obstacles. Then according to the original mode of cleaning work.If the ground with a step, it can also automatically start a program to prevent the cleaning device being broken. The paper mainly around which these functions of the system design and function of software analysis and design. The next task is writing system programs in the compiler environment, After successfully compiled and downloaded to the hardware system. Eventually, the design completed intended function of the intelligent cleaning device and reached the design requirement.Key Word:Intelligent control system; Cleaning robot; MSP430; Path planning目录摘要 (II)Abstract (III)1 绪论 (1)1.1 序言 (1)1.2 选题的背景和意义 (1)1.3 智能清洁装置的研究现状 (2)1.4 智能清洁装置研究的关键技术 (3)1.5 本课题研究的主要内容 (4)1.6 本章小结 (4)2 智能清洁装置控制系统结构与总体方案设计 (5)2.1 智能清洁装置结构 (5)2.2 智能清洁装置控制系统总体方案设计 (6)2.2.1 控制器模块 (6)2.2.2 信息采集模块 (7)2.2.3 电机驱动模块 (8)2.2.4 电源模块 (10)2.3 本章小结 (10)3 智能清洁装置控制系统软件设计 (11)3.1系统软件总体设计思路 (11)3.1.1 软件结构 (11)3.1.2 软件实现的总体思想 (12)3.2 各模块程序设计 (14)3.2.1 单片机系统时钟初始化 (14)3.2.2 电机驱动模块程序设计 (15)3.2.3 避障模块程序设计 (16)3.2.4 防摔模块程序设计 (18)3.2.5 主程序模块设计 (19)3.3 中断程序与中断嵌套问题 (20)3.4 本章小结 (21)4 系统调试 (22)4.1 软件调试 (22)4.2 系统软硬件联调 (23)5 结论 (24)致谢 (25)参考文献 (26)附录1 (27)附录2 (37)1绪论1.1 序言顾名思义,智能清洁装置控制系统也被叫做智能清洁机器人。
智能清洁机器人测控系统的设计与实现

智能清洁机器人测控系统的设计与实现0 引言移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
本文主要研究智能清洁机器人测控系统的设计与实现,最终目标是通过软硬件的合理设计,使智能清洁机器人能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
1 测控系统组成及功能智能清洁机器人测控系统主要包括控制器核心系统、传感器系统和驱动系统等。
其原理如图1所示。
基于清洁机器人自身体积尽可能小的原则,本设计将控制器核心系统、传感器系统、行走驱动及相关电路集成在一块上。
为防止干扰,通过光电隔离器件将各模块在电气上隔离开来。
利用超声波传感器、红外反射式传感器和接触传感器组成多传感器系统,检测信号经调理电路处理后送控制器;采用8位单片机SST89E554RC作为控制器,控制器对传感器信号加以判断,根据判断结果,选定相应的控制策略,并控制语音系统发出相应的报警信号;在相应的控制策略下,通过专用驱动器驱动直流电机,带动驱动轮,两轮独立驱动,实现避障功能;同时,控制器控制小型双风机真空吸尘系统对经过的地面进行必要的清扫。
图1 系统原理该新型智能清洁机器人实验平台如图2所示,该平台为圆形结构,两轮独立驱动,具备完整的吸尘系统和电源系统等功能模块。
最终将在该平台上对本文所介绍的测控系统的性能进行实验验证。
图2 智能清洁机器人实验平台2 测控系统硬件设计2.1 CPU控制模块CPU采用美国SST公司制造的8位单片机SST89E554RC。
器件使用与8051完全相同的指令集,并与标准的8051器件管脚对管脚兼容。
自动扫地机的控制系统设计_毕业设计说明书

本科毕业设计说明书自动扫地机的控制系统设计DESIGN OF CONTROL SYSTEM OF AUTOMATICSWEEPING MACHINE自动扫地机的控制系统设计摘要近年来,随着社会的发展需要,清洁机器人已经渗透了我们的生活、工作和经济方面,并且起到了很大的作用。
清洁机器人的研究和发展对我们的经济发展有很多的影响。
这片文章主要通过阐述清洁机器人在服务行业的重要性,对清洁机器人在各国发展状况的一些综述,让读者了解将来清洁机器人发展对社会发展的重要性。
本文首先介绍了国内外自动清洁扫地机的研究现状,阐明了本课题研究的目的、意义。
然后进一步介绍本自动扫地机的总体结构,并详细分析了该扫地机各部分结构的工作原理,针对本清洁扫地机的机构特点,提出了一种能够保证扫地机稳定工作的单片机控制方案。
本文还添加了市场上没有出现的的功能,将扫地机和红外遥控结合起来,并与单片机有机结合起来,以达到对自动扫地机的各方面的控制和自控制;以及避障系统的改进方案。
关键词:扫地机,单片机控制,红外遥控,碰撞DESIGN OF CONTROL SYSTEM OF AUTOMATICSWEEPING MACHINEABSTRACTIn recent years, with the development of society, the cleaning robot has infiltrated our lives, work and the economy, and has played a significant role. Research and development of cleaning robot has a lot of influence on our economic development. This article mainly through expounding the importance of cleaning robot in the service industry, the development of cleaning robot in some countries, allowing readers to understand the importance of the future development of cleaning robot for social development.This paper firstly introduces the research status of automatic cleaning sweeping machine at home and abroad, discusses the research purpose, significance. And then introduce the automatic sweeping machine structure, and a detailed analysis of the working principle of each part of structure of the sweeping machine, according to the characteristics of the cleaning mechanism of sweeper, presented a can ensure the sweeping machine stable working single-chip microcomputer control scheme. This paper also added did not appear on the market the function, the sweeper and infrared remote control combined with MCU, and organic combination, in order to control all aspects of automatic sweeping machine and self control; and the obstacle avoidance system improvement program.KEYWARDS:Sweeping machine, microcomputer control, infrared remote control, collision目录摘要............................................................... I I ABSTRACT .......................................................... I II 1绪论.. (1)1.1 引言 (1)1.2 技术现状 (1)1.3 研究的目的和意义 (1)1.4 研究内容 (2)2关于单片机 (3)2.1 AT89C51简介 (3)2.2 AT89C51主要特性 (3)2.3 AT89C51功能特性概述 (3)2.4 AT89C51引脚功能说明 (4)2.5 AT89C51的基本操作 (6)3 自动扫地机总体设计 (7)3.1 组成结构 (7)3.2 系统的主控部分 (7)3.3 软件流程设计 (8)3.3.1 总体软件流程 (8)3.3.2 红外遥控系统流程 (10)3.3.3 驱动系统流程 (11)3.3.4 清扫避障系统流程 (12)4自动扫地机硬件电路设计 (13)4.1 系统总体设计 (13)4.2 传感器系统电路 (13)4.2.1 超声波传感器检测电路 (13)4.2.2 红外光电传感器检测电路 (13)4.2.2 红外光电传感器检测电路 (14)4.2.3 接触传感器检测电路 (15)4.3 继电器控制电路 (15)4.4 红外控制系统电路 (16)4.5 看门狗IMP813L电路 (17)4.6 驱动系统电路 (19)4.7 液晶显示电路 (20)4.8 电源模块 (21)4.9 清扫避障系统 (22)结论 (24)参考文献 (25)致谢 (27)1绪论1.1 引言自动扫地机是自动进行房间地而清洁的自主吸尘式家庭服务机器人,集机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能等诸多学科为一体。
扫地机的智能控制系统设计_毕业设计说明书 精品

本科毕业设计说明书扫地机的智能控制系统设计SWEEPER INTELLIGENT CONTROLSYSTEM DESIGN学院(部):电气与信息工程学院专业班级:电气#####学生姓名: ######指导教师: ##########年月日扫地机的智能控制系统设计摘要目前,各式各样的服务机器人越来越多应用于人们的生活中,从事着与人们生活息息相关的服务工作,极大地提高和改善了人们的生活质量。
室内智能扫地机器人就是在这种背景下诞生的一种家庭服务机器人。
室内智能扫地机器人的路径规划采用区域充满的规划方法,目标是在设定区域内寻找一条从始点到终点且经过所有可达点的连续路径。
根据建立的扫地机器人平台,提出清扫机器人随机运动路径规划算法。
机器人利用其上安装的红外传感器和摄像头来识别和感知房间环境,机器人开始以螺旋运动方式覆盖房间的空白区域,当遇到障碍物时,启动障碍物应对策略,通过计算机软件仿真和在房间环境中进行实验验证了该算法的有效性。
关键词:扫地机器人,单片机,环境识别,路径规划SWEEPER INTELLIGENT CONTROLSYSTEM DESIGNABSTRACTAt present time,more and more various of service robots are designed and applied to people’s daily life.The application of these robots is promoting the quality of people’s life tremendously as they deal with the works related to people’s life closely.Indoor automatic cleaning robot is one of these service robots developed to help people to carry out the troublesome room cleaning work.The path planning algorithm of Indoor Automatic Cleaning Robot should spread over the room area using the area filling path planning algorithm to find a continuous path from start to end. A random moving path planning algorithm is put forward based on the platform. The cleaning robot identifies the room environment using the infrared transducer and the camera outfitted on its body.Moving in the spiral motion mode with the gradually enlarging radius,the robot begins to explore and clean the blank area.While it encounters obstacles like wall or furniture,it will start the strategy of dealing with obstacles.This algorithm is validated through computer simulation and robot experiment.KEYWORDS:cleaning robot,single chip microcomputer,environment identification,path planning1绪论1.1 引言自动扫地机器人是当今服务机器人领域的研究热点。
基于单片机的智能扫地机-电路系统设计及装配与调试
基于单片机的智能扫地机-电路系统设计及装配与调试摘要如今,机器越来越智能,随着智能化时代到来,智能机器也给人民带来诸多便利。
家庭智能机器更是应用最广的地方,而智能扫地便能够给人们带来极大的方便,不仅能够给人类带来舒适干净的环境,还能推动社会智能化的发展。
本文主要设计一个简单的智能扫地机。
该扫地机的核心控制元器件是stc89c52,具有编写程序简单,成本普遍较低,功能较多,效率特别高等优点,因此在市场上得到很大的应用。
除此之外,该扫地机能够自动避开障碍物、自动利用风机进行吸尘功能。
该文介绍了扫地机系统的整体制作过程,它主要由单片机主控电路、单片机最小系统电路、红外光电避障电路、按键启动停止电路以及电机驱动电路组成。
通过利用Altium Designer集成电路设计软件,进行原理图以及电路板的设计。
其次通过KEIL编程软件为单片机输送程序,来控制整个扫地机的逻辑。
关键字:智能吸尘机;壁障;stc89c52单片机;L298NIntelligent Sweeper Based On MCU-Circuit system design, assembly and debuggingAbstractNowadays, machines are becoming more and more intelligent. With the coming of intelligent era, intelligent machines also bring many conveniences to people. Home intelligent machine is the most widely used place, and intelligent sweeping can bring great convenience to people. It can not only bring comfortable and clean environment to human, but also promote the development of social intelligence.This paper mainly designs a simple intelligent sweeper. The core control component of the sweeper is STC89C52, which has the advantages of simple programming, low cost, more functions and high efficiency, so it is widely used in the market. In addition, the sweeper can automatically avoid obstacles and use the fan for dust collection. This paper introduces the whole manufacturing process of the sweeper system, which is mainly composed of the main control circuit, the minimum system circuit, the infrared photoelectric obstacle avoidance circuit, the key start stop circuit and the motor drive circuit. By using the integrated circuit design software of Altium designer, the schematic diagram and circuit board are designed. Secondly, the logic of the whole sweeper is controlled by the program of keil.Keywords: intelligent vacuum cleaner; barrier; stc89c52 single chip microcomputer; L298N目录1、概述 ............................................................ 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
组员
新能源科学与工程
智能扫地机控制系统简介 采用单片微控器 智能扫地机各系统分析 扫地机系统设计
Part One
智能扫地机控制系统简介
智能扫地机控制系统简介
目前,各式各样的服务机器人越来越多应用于人们的生活中,从事着与人们生 活息息相关的服务工作,极大地提高和改善了人们的生活质量。室内智能扫地机器
智能扫地机各系统分析
3 智能扫地机各系统分析
该智能系统采用红外传感器、光电传感器、接触传感器完成自动避障。用光 电编码器检测电机的转速。利用PWM技术来动态控制电动机的转动方向和转速。 通过软件编程实现清扫机行进、执行清扫任务、绕障、停止的精确控制以及检 测数据的存储、显示。通过对电路的优化组合最大限度地利用AT89C51单片机的全部资
IMP813L有双列直插和贴片封装形式,其双列直插如图所示, 引脚功能如下:
第1脚为手动复位输入,低电平有效;第2、3脚分别为电源和 地;第4脚为电源故障输入;第5脚为电源故障输出;第6脚为看门 狗输入,第7脚为复位输出,第8脚为看门狗输出。
3.3看门狗电路系统
被检测的电源
R1 +V5
R2
手动
PF1
3.1.2碰撞检测
碰撞检测采用霍尔元件 EW462,芯片的内部原理框图如图3-4所示,芯片的工作方式 如图3-5所示。芯片的供电电压范围为 4.5V~18V,灵敏度高,阻抗低,工作的最大输出 电流为 15mA。当芯片的正上方有S极磁场时,霍尔元件输出高电平,当元件偏离磁场 后,元件输出低电平。通过控制霍尔元件正上方的磁场极性,可以控制元件输出信号 的变化趋势。当极性相反时,元件在偏离磁场时为高电平,正对磁场时为低电平。
开始 初始化并开中断
启动各电路模块
N 收到前进命令?
Y 启动驱动系统
前进
N 遇到障碍?
Y 启动清扫和避障系统
结束
4.4 红外遥控系统流程
红外遥控系统流程
•发射电路主程序的流程图如图4.3所示主程序中设置串 口工作方式1和定时器T1方式2是为了发射按键代码时产 生2000b/s的波特率;定时器T0工作方式2是用来在P3.7 引脚上输出38kHz的载波信号。有按键下时产生外部中断 0,寄存器R5和R4中存放的数据是用来控制1 min 的定时 时间。1 min之内无按键,则遥控器进入低功耗状态。定 时器T0中断程序是将P3.7引脚取反产生38kHz的载波信号, 此信号为方波信号。外部中断0的中断程序用于判断按键 并发射按键代码,同时还包括按键去抖动和检查设置相 关标志位。
系统工作时,单片机P1口输出的控制信号经过驱动器芯片74HC245和光电耦合器之后输入电机驱动 芯片L298N,控制电机动作。当需要调速时只需改变PWM调速脉冲(本设计中由单片机P1.3和P1.6端口 产生)的占空比即可,理论上可以实现256级调速。
4.3 总体软件流程
总体软件流程
•包括初始化整个系统、启动各电路模块、等待接收 命令、启动驱动系统、检测障碍、启动清扫避障系 统、结束清扫等过程。 (1) 首先,启动清扫机电源,使各模块持续供电。 (2) 启动各电路模块,启动液晶显示系统,以便显示 清扫机行进速度及运行时间。 (3) 当接收到前进指令 时,启动驱动系统。 (4) 当遇到障碍时启动清扫系统及避障系统,此过程 是整个清扫系统的关键,此过 程包括清扫命令接收判断及是否遇到障碍物判断。
Part Two
采用单片微机控制器
单片微控器
本设计以AT89C51单 片机作为检测和控制核
心。是美国ATMEL公司 生产的低电压,高性能
CMOS 8位单片机。兼容 标准MCS-51指令系统,
片内置通用8位中央处理 器(CPU)和Flash存储 单元。
AT89C51 主要性能参数
1.与MCS-51产品指令系统完全兼容 2.有4K字节可重擦写Flash闪速存储器 3.有1000次的擦写周期 4.全静态操作:0Hz~24MHz 5.有128×8字节的内部RAM 6.有32个可编程I/O 口 7.有2个16位定时/计数器 8.有6个中断源 9.低功率空闲和掉电模式
WD1
VCC
PFO
IMP813L
RESET
MR
GND
WDO
P1.4
INT1 AT89C51
P1.9
看门狗电路系统
IMP813L的典型应用电路: IMP813L的典型应用电路如图3.6所示。图中单片机以AT89C51为例, IMP813L的第1脚与第8脚相连。第7脚接单片机的复位脚(AT89C51的 第9脚);第6脚与单片机的P1.4相连。在软件设计中,P1.4不断输出 脉冲信号,如果因某种原因单片机进入死循环,则P1.4无脉冲输出。 于是1.6s后在IMP813L的第8引脚输出低电平,该低电平加到第1脚, 使IMP813L产生复位输出,使单片机有效复位,摆脱死循环的困境。 另外,当电源电压低于门限值4.65V时,IMP813L也产生复位输出, 使单片机处于复位状态,不执行任何指令,直至电源电压恢复正常, 可有效防止因电源电压较低时单片机产生错误的动作。 电源故障输入PFI通过一个电阻分压器监测未稳压的直流电源。当 PFI低于1.25V时,电源故障输出脚第5脚PF0变低,可引起AT89C51 中断,进行电源故障处理,或将重要数据保存下来。把分压器接到 未稳压的直流电源是为了更早地对电源故障告警。 IMP813L是一体积小、功耗低、性价比高的带看门狗和电源监控功 能的复位芯片;它使用简单、方便,它所提供的复位信号为高电平, 因而是应用于复位信号为高电平场合的单片机系统的理想芯片。
4.2 驱动系统电路
驱动系统电路
驱动系统电路包括驱动器、光电隔离模块以及驱动器保护电路等部分。在具体电路中,由于单片 机使用5V弱电,而电机的驱动电压为12V或者更高,考虑到单片机会受到驱动部分的干扰,因此采用了 光电耦合器TLP521,把控制部分和驱动部分隔离开来。单片机输出端口的电流一般只有20mA左右,不 足以或者不能稳定地驱动光电耦合器TLP521工作,因此采用芯片74HC245来增强驱动能力,为光电耦合 器TLP521提供合适的驱动电流。驱动器保护电路由8个高速大电流肖恩特二极管1N5822(图中D1~D8) 组成,用来消除电机在起停、制动及换向时产生的反电势。
3.1.2碰撞检测
电源 稳压
霍尔
信号
施密特
输出
元件
处理
触发器
信号
图3-4 EW462 芯片的内部原理框图
3.2 驱动系统
驱动器就是驱动扫地机的动力部件,最常用的就
电机用PWM控制技术所谓 PWM 控制技术,就是通过
是电机。扫地机最主要的控制量就是控制扫地机的 控制半导体开关器件的导通与关断,把直流电压变成电
3 智能扫地机各系统分析
传感器系统
扫地机 各系统
驱动系统
红外遥控系统 浮动开关电路
看门狗电路
液晶显示电路
红外遥控是目前使用最广泛的一种 通信和遥控手段。主要用来来控制 智能扫地机的清扫方式及开机与关
机。
浮动开关是一个安装在轮子内侧的机械 开关,轮子上有弹簧装置,当轮子浮起 时,开关断开扫地机停止前进,实现了
人就是在这种背景下诞生的一种家庭服务机器人。室内智能扫地机器人的路径 规划采用区域充满的规划方法,目标是在设定区域内寻找一条从始点到终 点且经过所有可达点的连续路径。根据建立的扫地机器人平台,提出清扫 机器人随机运动路径规划算法。机器人利用其上安装的红外传感器和摄像 头来识别和感知房间环境,机器人开始以螺旋运动方式覆盖房间的空白区 域,当遇到障碍物时,启动障碍物应对策略,通过计算机软件仿真和在房 间环境中进行实验验证了该算法的有效性。
制正反转。该电机可以由PWM信号直接驱动,
3.3看门狗电路系统
MR WDO
VCC RESET
IMP813L
GND
WDI
PFI
PFO
看门狗电路系统
单几乎所有的单片机都需要复位电路,对复位电路的基本要求 是:在单片机上电时能可靠复位,在下电时能防止程序乱飞导致 EPROM中的数据被修改;另外,单片机系统在工作时,由于干扰等 各种因素的影响,有可能出现死机现象导致单片机系统无法正常工 作,为了克服这一现象,除了充分利用单片机本身的看门狗定时器 (有些单片机无看门狗定时器)外,还需外加看门狗电路;除此以外, 有些单片机系统还要求在掉电瞬间单片机能将重要数据保存下来, 因掉电的发生往往是根随机的,因而此类单片机系统需要电源监控 电路,在掉电刚发生时能告知单片机。IMP813L刚好能满足这些要 求,下面具体介绍该芯片的性能特点及使用方法。
防跌落功能。
采用2行16个字的DM-162液晶 模块,通过与单片机连接,编 程,完成显示时间及清扫机行
进速度的功能。
3.1 传感器系统
内传感器系统
主要用于采集系统自身状态的信息,比如速度、加速度、轨迹、位置等。这类传感器 主要有测速发电机、加速度计、编码器、陀螺仪、电子罗盘等。
外传感器系统
外传感器负责采集系统外部环境信息,比如图像、距离、受力等。这类传感器包括 CCD视觉传感器、超声波传感器、红外传感器、力传感器等。
机器人的工作电机分为行走、吸尘和毛刷电
机。清扫结构主要使用真空吸尘器和由电机带动的
旋转毛刷。
永磁无刷电动机具有效率高,功率大,体积
小,控制精度高等明显特点在机器人领域有着广泛
的应用。
选用的轮子驱动电机即为无刷直流电机,
其工作电压是10~15V,最大工作电流0.84A,正常工
作电流0.4A,有专门的换向控制引脚,高低电平控
AT89C51 引脚
表2.1 端口引脚第二功能表
端口引脚
第二功能
P3.0
RX出口)
P3.2
(外中断0)
P3,3
(外中断1)