海洋重力测量求取测网交叉点的新方法
海洋重磁测网判定测线相交的实用方法

海洋重磁测网判定测线相交的实用方法廖开训【摘要】在海洋重磁调查领域,判断测网中2条测线相交与否是重磁数据处理中需要解决的重要问题之一,目标是能够快速准确地确定交叉点的位置,从而计算出交点差.针对以往计算方法的不足,利用计算几何学中同一平面上线段相交的几何特征和计算方法,通过排斥判断和跨越判断2个步骤,对线段的相交与否进行判别,编写的程序逻辑简洁、实用,避免了数学错误.在实际应用中,提高了判断线段相交的效率和准确性,取得了良好的效果.【期刊名称】《地质学刊》【年(卷),期】2019(043)002【总页数】5页(P296-300)【关键词】交点;线段;排斥判断;跨越判断;矢量叉积;海洋重磁测网【作者】廖开训【作者单位】广州海洋地质调查局,广东广州510075【正文语种】中文【中图分类】P7380 引言在海洋重磁调查领域,测线网通常都布设成纵横相交的主测线和副测线,由于船舶容易受到涌浪、海流等波动的影响,测量结果存在各种偶然误差,使得同一仪器在主副测线交叉点处的测量值不同,即交叉点不符值(简称交点差)。
根据调查规范(国家海洋局,2007),通过计算统计交点差得到内符合准确度,并作为测量成果精度的评估依据。
在统计测量误差时,判断2条线段相交与否是重磁数据处理众多算法中要解决的问题之一。
在某次海洋磁力数据处理中,使用分段求解法(杨震等,2013)进行交点计算,但结果出现了缺漏现象,分析原因可能是出现了数学错误(如浮点数精度丢失、被0除等)。
一些学者对线段相交的算法进行研究,提出了如曲线双向裁剪法(夏德麟等,1996)、用直线段求交模糊树的方法(刘强等,1997)、矩形窗口裁剪算法(刘中琦等,2000)、扫视法线段求交(程昌秀等,2001)等方法。
常规n条线段相交算法通常依次对线段两两求交,从而确定是否有交点,有的还要列出数学方程式解方程组,使得算法复杂、时间增加(李永红等,2004;朱东晖等,2005)。
海空重力测网交叉点搜索方法和装置[发明专利]
![海空重力测网交叉点搜索方法和装置[发明专利]](https://img.taocdn.com/s3/m/af7e7391168884868662d655.png)
专利名称:海空重力测网交叉点搜索方法和装置专利类型:发明专利
发明人:徐光晶,舒晴,周坚鑫,屈进红,张文志,孟庆奎申请号:CN202010771152.7
申请日:20200803
公开号:CN111913229A
公开日:
20201110
专利内容由知识产权出版社提供
摘要:提供一种海空重力测网交叉点的遍历搜索方法,包括:确定平行于纵横坐标轴的、两个分别包围测网主副测线的最小外接矩形;取出两个外接矩形的重合矩形作为测网交叉点搜索范围,利用中心点将该重合矩形均分为四个子矩形;判定每个子矩形内主副测线包含的测点数乘积是否大于预定值,若是,则将该子矩形继续分为四个子矩形进行递归处理,若否,则输出该子矩形内主副测线包络矩形重合区域的测点索引。
根据输出的测点索引,确定存在的交叉点和对应的测点信息。
还提供了一种海空重力测网交叉点搜索装置。
该方法可以在提高准确率的同时,提高搜索效率。
申请人:中国自然资源航空物探遥感中心
地址:100083 北京市海淀区学院路29号
国籍:CN
代理机构:北京云嘉湃富知识产权代理有限公司
代理人:程凌军
更多信息请下载全文后查看。
海洋勘探中的地球物理测量与数据处理
海洋勘探中的地球物理测量与数据处理海洋勘探一直是地球科学中的重要领域之一。
通过对海洋地球物理的测量与数据处理,我们能够更加深入地了解地球内部的构造和海洋的特征。
本文将介绍海洋勘探中的地球物理测量方法和数据处理技术。
一、海洋地球物理测量方法1. 重力测量重力测量是海洋地球物理领域中常用的一种方法。
通过测量不同海域的重力变化,可以推断出地壳的不均匀分布以及地下构造的特征。
重力测量一般利用船载或飞机携带的重力仪器,通过测量物体所受到的重力大小来进行分析。
2. 磁力测量磁力测量是测量海洋地球物理信息的另一种重要手段。
地球本身具有磁场,而地下的岩石和矿物质会对磁场产生扰动。
通过测量海洋不同区域的磁场变化,可以推断出磁异常区的存在以及地下的岩层分布情况。
3. 地震测量地震测量是海洋勘探中最为广泛应用的一种方法。
它利用地震波在地球内部传播所产生的不同反射、折射和散射特性,来研究地下结构的情况。
地震测量一般需要使用声源和接收器,将地震波信号传播到地下并测量反射回来的信号。
二、海洋地球物理数据处理技术1. 数据采集与预处理海洋地球物理测量需要大量数据的采集和处理。
在测量过程中,需要确保数据的准确性和完整性。
因此,数据采集和预处理工作是不可或缺的环节。
这包括对测量仪器的校准和调试,数据清洗和去噪等预处理工作。
2. 数据解释和模拟海洋地球物理数据解释是将测量得到的数据与实际地下结构进行对比和分析的过程。
通过数学和物理模型的建立,可以将地球内部的结构特征呈现出来。
同时,数据模拟也是数据处理的重要一环,通过模拟不同地质结构对测量数据的影响,进一步验证数据分析的结果。
3. 数据可视化数据可视化是海洋地球物理数据处理的一种重要手段。
通过将数据转化为可视化的图像或动画,可以更加直观地理解地下结构和海洋特征。
常见的数据可视化方法包括等值线图、三维立体图以及动画演示等。
三、海洋勘探中的地球物理测量与数据处理的应用1. 资源勘探地球物理测量和数据处理在海洋资源勘探中有着广泛的应用。
海洋重力水下重力测量技术进展
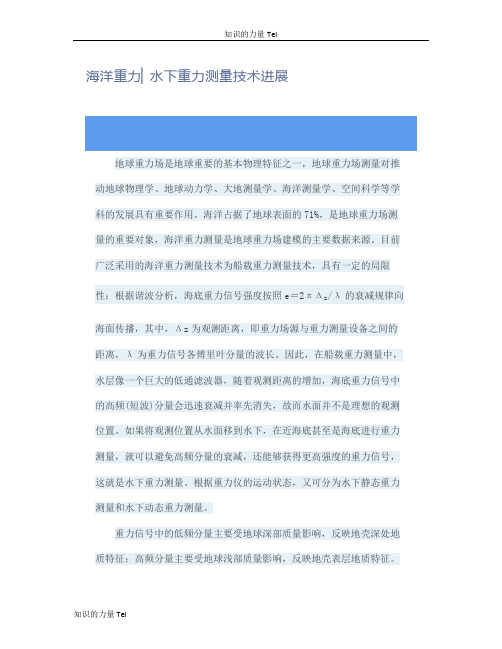
海洋重力▏水下重力测量技术进展地球重力场是地球重要的基本物理特征之一,地球重力场测量对推动地球物理学、地球动力学、大地测量学、海洋测量学、空间科学等学科的发展具有重要作用。
海洋占据了地球表面的71%,是地球重力场测量的重要对象,海洋重力测量是地球重力场建模的主要数据来源。
目前广泛采用的海洋重力测量技术为船载重力测量技术,具有一定的局限性:根据谐波分析,海底重力信号强度按照e=2πΔz/λ的衰减规律向海面传播,其中,Δz为观测距离,即重力场源与重力测量设备之间的距离,λ为重力信号各傅里叶分量的波长。
因此,在船载重力测量中,水层像一个巨大的低通滤波器,随着观测距离的增加,海底重力信号中的高频(短波)分量会迅速衰减并率先消失,故而水面并不是理想的观测位置。
如果将观测位置从水面移到水下,在近海底甚至是海底进行重力测量,就可以避免高频分量的衰减,还能够获得更高强度的重力信号,这就是水下重力测量。
根据重力仪的运动状态,又可分为水下静态重力测量和水下动态重力测量。
重力信号中的低频分量主要受地球深部质量影响,反映地壳深处地质特征;高频分量主要受地球浅部质量影响,反映地壳表层地质特征。
船测重力数据无法探测到海底重力信号中的高频信息且其测得的信号强度较弱,只能用于研究有关地壳深处地质特征的理论,无法满足洋底地壳表层研究需求。
在军事领域,潜艇的水下长航时潜航需要高精度的水下导航系统,其核心是高性能惯性导航系统,随着惯性器件精度的提高,由惯性器件误差引起的定位误差所占比重逐渐减小,重力异常将成为制约高性能惯导精度的主要因素。
为进一步提高惯导精度,需要进行重力异常补偿,重力异常补偿有两种途径:一是潜艇搭载重力仪进行实时重力测量,二是利用先验重力海图进行补偿,以上两种方法都需要发展水下重力测量技术。
地球重力场还可以用于水下重力匹配导航,如采用船测重力海图作匹配参考,需将船测重力数据向下延拓至潜航器工作深度,这一过程是发散的,会引入很大误差,甚至可能导致匹配失败,水下重力测量则可直接构建水下近海底重力场模型,重力辅助导航可直接使用测量深度附近的重力场数据作为参考或采用向上延拓算法延拓至工作深度,免除了向下延拓计算存在的发散问题,提高了重力匹配导航的精度。
测绘技术中的海洋测量方法与技巧
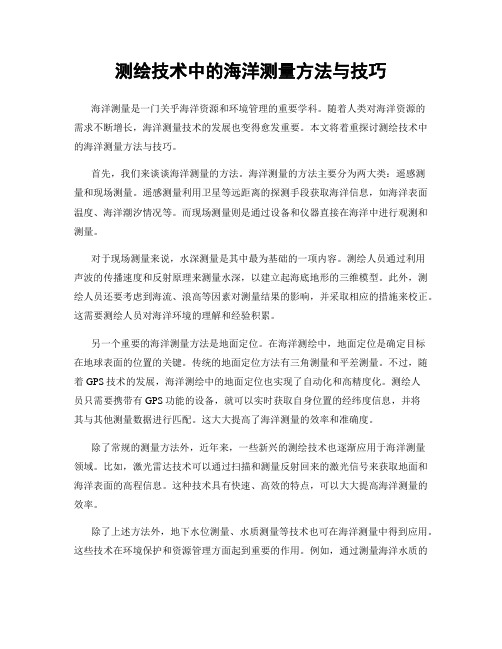
测绘技术中的海洋测量方法与技巧海洋测量是一门关乎海洋资源和环境管理的重要学科。
随着人类对海洋资源的需求不断增长,海洋测量技术的发展也变得愈发重要。
本文将着重探讨测绘技术中的海洋测量方法与技巧。
首先,我们来谈谈海洋测量的方法。
海洋测量的方法主要分为两大类:遥感测量和现场测量。
遥感测量利用卫星等远距离的探测手段获取海洋信息,如海洋表面温度、海洋潮汐情况等。
而现场测量则是通过设备和仪器直接在海洋中进行观测和测量。
对于现场测量来说,水深测量是其中最为基础的一项内容。
测绘人员通过利用声波的传播速度和反射原理来测量水深,以建立起海底地形的三维模型。
此外,测绘人员还要考虑到海流、浪高等因素对测量结果的影响,并采取相应的措施来校正。
这需要测绘人员对海洋环境的理解和经验积累。
另一个重要的海洋测量方法是地面定位。
在海洋测绘中,地面定位是确定目标在地球表面的位置的关键。
传统的地面定位方法有三角测量和平差测量。
不过,随着GPS技术的发展,海洋测绘中的地面定位也实现了自动化和高精度化。
测绘人员只需要携带有GPS功能的设备,就可以实时获取自身位置的经纬度信息,并将其与其他测量数据进行匹配。
这大大提高了海洋测量的效率和准确度。
除了常规的测量方法外,近年来,一些新兴的测绘技术也逐渐应用于海洋测量领域。
比如,激光雷达技术可以通过扫描和测量反射回来的激光信号来获取地面和海洋表面的高程信息。
这种技术具有快速、高效的特点,可以大大提高海洋测量的效率。
除了上述方法外,地下水位测量、水质测量等技术也可在海洋测量中得到应用。
这些技术在环境保护和资源管理方面起到重要的作用。
例如,通过测量海洋水质的PH值、盐度和溶解氧含量等指标,可以了解海洋环境的健康状况,从而采取相应的保护措施。
此外,还有一些技巧也非常关键。
首先是仔细了解任务要求和测量范围。
在进行海洋测量前,测绘人员必须充分了解任务的目标和要求,确定测量范围和精度,以便制定出相应的测量方案。
海洋地球物理探测4—海洋重力测量3

2.在同一地区,异常愈尖锐,范围愈小(以X1/2来度量), 则该地质体的埋深会越小,反之则会更深。
c. 重力异常的高阶导数特征
采用同样前方法,可以得到计算x剖面上点P(x,0,0)处的 重力高次导数公式,它们分别是:
Vxz
3GM
(x2
Dx D2 )5 2
2D2 x2 Vzz GM ( x2 D2 )5 2
阶顶面与底面深度分别为h和H,剩余密度为 ,则由二度体△g
公式,得台阶在X轴上P(x,0,0)点处引起的重力异常为:
g 2G
d
0
H d h ( x)2 2
G
(H
h)
x ln
x2 H2 x2 h2
2H
arctan x H
2h arctan
里设其值为零来描述以下几种情况。
断面倾角小 于90度的正 断层:下降 盘一侧的异 常值突出;
垂直断层:以原点为中 心对称的曲线
断层的重力异常理论曲线
断面倾角大 于90度的逆 断层:上升 盘一侧的异 常值突出;
断层的重力异常理论曲线 断面两侧重力异常的水平梯度变化较大,在平面等值线图 中为呈对称分布的重力异常等值线密集带,常称为重力梯级带, 这是识别断裂构造的重要标志。
4、二度长方体
沿水平方向延伸较长而横截面近于矩形的矿脉,可以当 成二度长方体来研究。在计算它的异常时,可用两个铅垂台 阶异常之差,来获得这一长方体的重力异常及各阶导数异常 的公式。
一、 引起重力异常的主要地质因素 二、 叠加重力异常 三、 重力异常分离方法 §4.4.3 重力异常的地质解释
§4.4.1 规则几何地质体的重力异常
海洋测量交叉点误差分析交叉点误差的确定

海 洋 测 绘 HYDROGRAPHIC SURVEYING AND CHARTING
Vol. 35 , No. 4 Jul. , 2015
DOI: 10. 3969 / j. issn. 1671 - 3044. 2015. 04. 001
海洋测量交叉点误差分析 ( 一 ) : 交叉点误差的确定
2
海
洋
测
绘
第 35 卷
又如卫星测高的主要误差源是卫星的轨道误差 , 而 [13 - 14 ] , 后者表现出慢变的周期性 除轨道误差外, 另 — —洋流也具有一定的时变性[15]。 一个误差源— 定位误差, 即名义上的交叉点在不同测线上对 应着不同的实际位置, 这在高精度的 GPS 引入之前 尤为明显。如 20 世纪 70 年代末 GPS 引入后, 水深 测 量 交 叉 点 误 差 的 中 值 从 100 250m 下 降 到 26m , 由此可见, 定位误差是引起交叉点误差的 一个重要因素。 姿态误差。在需要定向测量的场合, 都需要姿 [17 ] [5 ] 态信息, 如重力测量 和水深测量 。 相比位置, 姿态信息获取的难度较大, 其精度的提高往往意味 着成本的成倍提高, 如提供姿态的 Octans 或其他惯 性设备的成本可以和水深测量设备本身相比拟 。 测量设备本身的误差。任何实际测量都存在误 差, 这是自 Gauss 时代以来广为接受的基本事实。 比如在多波束水深测量中外围波束的测量误差就明 [6 ] 显大于内层波束 。 安装标校误差。 在有些场合, 如多波束测深系 统中, 由于体积和安装精度的限制, 导航模块 ( 用于 定位和定姿) 与测量模块在几何上不可避免地存在 偏移, 如中心点的不重合、 以及三轴指向的不一致。 在测量 作 业 开 始 前 需 要 对 这 些 偏 移 效 应 进 行 标 [18 ] 校 , 但不可避免的是: 由于标校精度的限制, 部分 剩余偏移效应将仍然存在。 值得指出的是, 这部分 误差一般会与前述几种误差耦合在一起影响最终的 测量误差。 数据连续化引入的误差。数据连续化是数据编 辑的一项重要内容, 其目的是得到网格化的数据, 而 对于本文则还要得到交叉点处的数据 。数据编辑的 [19 ] 一个目的是减小误差, 如粗差探测 , 但在数据连 续化( 网格化) 过程中同样也会引入误差, 因为实际 中的被测对象往往是一个无限带宽的量, 而连续化 过程中使用的各种内插拟合方法, 都只能做到有限 尽管 Hunegnaw 等强调要采用尽可能高阶的 逼近, Chebyshev 多项式进行拟合, 但实际测量数据的有限 性决定了最高阶数 ; 另外, 在有些测量场合定位 数据不够稠密, 不仅测量值本身需要连续化处理 , 定 这将进一步增加 位数据也需要进行连续化处理 , , GPS 这部分误差 幸运的是目前 的输出率已经可以 , GPS / INS 做得非常高 特别是在 组合的场合, 导航 数据的输出率可以达到几百赫兹, 完全可以不必考 虑这部分误差的影响。 可以发现水深、 重力一般不具有时变性 , 因 此这部分误差可以忽略; 高精度 GPS 的引入也使定
海洋重力测量及其在重力场中的应用
海洋重力测量及其在重力场中的应用摘要海洋重力测量是在海上或海底进行连续或定点观测的—种重力测量方法。
近几年来,随着卫星技术的发展,精密的海洋重力仪不断出观,海洋重力得到迅速的发展。
简要介绍海洋重力测量的特点及其发展,阐述其技术设计与实施,分析其在全球重力场研究中的重要作用。
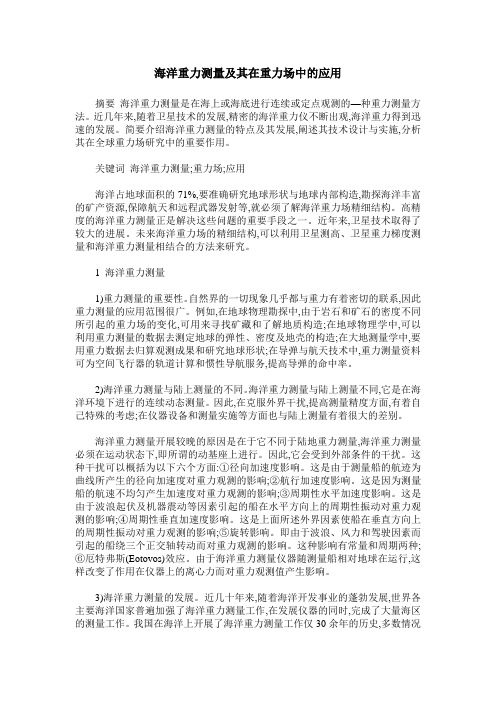
关键词海洋重力测量;重力场;应用海洋占地球面积的71%,要准确研究地球形状与地球内部构造,勘探海洋丰富的矿产资源,保障航天和远程武器发射等,就必须了解海洋重力场精细结构。
高精度的海洋重力测量正是解决这些问题的重要手段之一。
近年来,卫星技术取得了较大的进展。
未来海洋重力场的精细结构,可以利用卫星测高、卫星重力梯度测量和海洋重力测量相结合的方法来研究。
1 海洋重力测量1)重力测量的重要性。
自然界的一切现象几乎都与重力有着密切的联系,因此重力测量的应用范围很广。
例如,在地球物理勘探中,由于岩石和矿石的密度不同所引起的重力场的变化,可用来寻找矿藏和了解地质构造;在地球物理学中,可以利用重力测量的数据去测定地球的弹性、密度及地壳的构造;在大地测量学中,要用重力数据去归算观测成果和研究地球形状;在导弹与航天技术中,重力测量资料可为空间飞行器的轨道计算和惯性导航服务,提高导弹的命中率。
2)海洋重力测量与陆上测量的不同。
海洋重力测量与陆上测量不同,它是在海洋环境下进行的连续动态测量。
因此,在克服外界干扰,提高测量精度方面,有着自己特殊的考虑;在仪器设备和测量实施等方面也与陆上测量有着很大的差别。
海洋重力测量开展较晚的原因是在于它不同于陆地重力测量,海洋重力测量必须在运动状态下,即所谓的动基座上进行。
因此,它会受到外部条件的干扰。
这种干扰可以概括为以下六个方面:①径向加速度影响。
这是由于测量船的航迹为曲线所产生的径向加速度对重力观测的影响;②航行加速度影响。
这是因为测量船的航速不均匀产生加速度对重力观测的影响;③周期性水平加速度影响。
这是由于波浪起伏及机器震动等因素引起的船在水平方向上的周期性振动对重力观测的影响;④周期性垂直加速度影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测线 的 交叉点 的符 合程 度 来 估 算整 个测 区的测量精 度 。 然 而测量 船在 海上 难免 不 受风 流 浪等 各种 干扰
因素的影响 , 测量航迹线一般 不是规 则直线, 而是呈波动式变化 。 在海洋重力测量中, 每条测线上的测点 的数 据是 数 以 万计 , 如何 快 速 的 求解 交叉 点是 十分 必要 的 。本 文 尝试 了一种 新 的求 解 交叉点 的方法 , 可 称 为分段 求 解 法 , 通过 Ma t l a b , C语 言实践证 明此方 法既 实用 又方便 。
据。
如图 1 所示 , 设 P点为主、 副测线交叉点, P j 和 P i 十 为主测线在交叉点两侧的邻近点, 对应 的重力
值为g i 和g i + I P j 和P j + 一 为 副测 线在 交叉点两 俩 的邻 近点 , 对 应 的重力 值 为 g j 和g j + 1 。 将P i 、 P i 十 1 和P j 、 P j + 1 四点 连 成 简单 的 直 线 方程 组 , 即 可求 得 交 叉点 的坐 标为 :
关键词: 交 叉点 I 波动 式 ; 分段 求解 法
中 图分类 号  ̄ P 7 1 4
文献 标识 码 : A
文章 编号 : 1 0 0 6 -7 9 8 1 ( 2 0 1 3 ) 1 7 -0 0 0 7 -0 2
在 海洋 重 力 测 量 中 , 由于海 洋 测量 环 境 的特殊 性, 海 洋重 力测 线一 般都 要 布设 成 纵横 相 交 的网状 ,
ቤተ መጻሕፍቲ ባይዱ
②利 用公 式 ( 6 ) 一( 9 ) 判断 P是 否在 主副测 线之
间, 若 成立 , 则 进行 ③ , 若不 成立 , 返 回① 。 ③从 主测 线 与副测 线 的第 一段 开始计 算两 段 的 交 点, 用公 式 ( 6 ) 一( 9 ) 进行判断 , 若成立 , 则 计算 的 交 点 即为 所求 交点 , 跳 出循 环 。若 不成立 , 进行④ 。 ④分 别计 算 主测线 与 副测 线 的第 一段 的两个 端 点 到 交点P( x p , Y , ) 的距 离 , S | 1 , S 与S j l ' S 脚。 判断S 与S j 1 的大小 , 若s i >S j 1 , 则 主测 线 向前 推进 一段 , 作 为主 测线第 一 段 , 否则 , 副 测线 向前推 进一 段作 为副 测 线 第一段 。返 回③ , 进行 迭代 。 ⑤迭代完毕 , 若 没 有 找 到主 测线 与 副 测线 的交 点, 进 行下 一 步 。
X
Y p =R1 ( x p -x  ̄ ) +y i
( 2 )
其 中 : ‘ 一 }
R 2 。 = 丝J
xj -x j +  ̄ J
R , :
I
( 3 )
设主、 副测线 在交点处 的重力值分别为 g 主和 g _ , 则交叉点的重力值为:
g 主 _ g i + ( g l + 1 _ g i ) 未 I g 一 : = = g j + ( g j + 1 一 g j ) J
⑥ 将判 断存 在 交点 的但 以上 循环 没有 找到具 体 位 置 的主 副测线 平 分为 2 0 0段 。 ⑦ 将 平 分 后 的测 线 段 , 依次计算交点 , 用 公 式
圈 l 重 力 测 线 交 点 示 意 图
海 洋 重力 测 量 中 , 每 条 测 线 上 的 测 点 的数 据 是
数以万计 , 因此用人工求取纵、 横侧向的交点坐标及 其重力不符值是一项繁琐的工作。为了解决这个问
收稿 日期 : 2 0 1 3 —0 6 —1 7
首先讨论一种 简单 的情况 , 即所有测线都是直
作者简 介; 扬震 ( 1 9 8 8 一) , 男, 中国海 洋大学硕 士研 宛生 , 主要从 事重磁数据 处理方面的研 究。
8
内蒙 古石 油化 工
2 0 1 3 年第 1 7 期
线 的情况 。假设 , 一 个测 区共有 n条 主 测线 L i ( i =1 , 2 , 3 , …, n ) 和 m 条 副测线 L j ( j =1 , 2 , 3 , …, m) 。首先
x p = ( 1 )
海洋重力测量资料经过在海上作业时的初步整 理之 后 , 还需 要作 进 一步 的后处 理 。 后 处理 的核 心是 海洋 重 力侧 线 网 整 体 平 差 , 但 是 要 想 让 所 有 的测 线 都参 加 平 差计 算 , 必 须 首 先 建 立 起 测 点 与 测点 之 间 的 函数 相 关 模 型 , 这 就 需 要 搜 索 到 相 应 的 交 叉 点n ・ 。 1 重 力测 线相 交点 计 算
2 0 1 3 年第 1 7 期
内 蒙古 石 油化 工
7
海洋 重 力测 量求取测 网交叉 点的新方法
杨
摘
震, 李振 振 , 马 学伟
( 中 国海洋 大学 海洋地球科学学院 , 山东 青 岛 2 6 6 1 0 0 )
要; 根 据《 海 洋 重力 测 量规 范》 要求, 海 洋重 力测 线一般 都要 布 设 成纵 横 相 交 的 网状 , 依 据纵 横
题, 可以设计一种利用计算机 自动计算测线交叉点 坐标 的方 法 。
根据纵横测线的交叉点的符合程度来估算整个测区 的测量精度 。海洋重力测量 中由于存在各项偶然误 差使 得交 叉点 处 的重力 值 不 同 , 即交 叉点 不符 值 , 而 交 叉 点不 符值 正是 进行 海 洋重 力 测量 精 度评 估 的依
主、 副测线在交叉点处的重力不符值为:
Ag r =g 主- -g m ( 5 )
由 上面 的讨 论 可见 , 确定了P j , P . + 和P j , P j + 四
y
个点 后 , 求 取 交叉 点处 的重 力不 符值是 十分 简单 的 , 但 问题 的关 键是 如何 确定 交叉 点 及交叉 点邻近 四个 点 的位 置 。 2 测 线交 叉点计 算 的设 计思 想