基于坐标变换的微源逆变器虚拟复阻抗功率分配方法
基于非隔离型Weinberg变换器多模块并联系统的建模与控制环路设计

基于非隔离型Weinberg变换器多模块并联系统的建模与控制环路设计陈骞;郑岩;郑琼林;李艳;万成安【摘要】The current sharing accuracy and circuit reliability are emphasized in avionics DC power supply, so improved peak current control strategy is proposed. Based on the three-module non-isolated Weinberg converter system, this paper models the system and designs the controllers. The experimental results are given to verify the effectiveness of the design and superiority of improved peak current control by a 1 200 W prototype. This control strategy is suitable for the system-level application which requests more on the current sharing accuracy and integrity.%针对卫星电源对于均流精度及电路可靠性要求高的特点,本文提出了改进型峰值电流控制策略,即在传统峰值电流控制的基础上增加了平均电流控制,以提高均流精度和电路可靠性.本文以非隔离型Weinberg变换器的三模块并联系统为例,根据参数指标的要求,进行系统小信号建模及控制环路设计.最后制作1200 W实验样机,验证控制环路设计的合理性及改进型峰值电流控制方案的优越性.该控制策略适用于对均流精度及集成度要求很高的系统级场合.【期刊名称】《北京交通大学学报》【年(卷),期】2012(036)005【总页数】7页(P36-42)【关键词】非隔离型Weinberg变换器;蓄电池放电调节器;建模;峰值电流控制;均流【作者】陈骞;郑岩;郑琼林;李艳;万成安【作者单位】北京交通大学电气工程学院,北京100044;北京卫星制造厂,北京100190;北京交通大学电气工程学院,北京100044;北京交通大学电气工程学院,北京100044;北京卫星制造厂,北京100190【正文语种】中文【中图分类】TN86电源控制器(Power Conditioning Unit,PCU)作为卫星的一次电源,它的重要性不言而喻.PCU的作用是使能量在太阳能电池阵、蓄电池及内部单元之间适当分配,从而使母线电压保持恒定,为卫星上的电气设备提供能量.目前我国研制的PCU母线电压有28 V、42 V和100 V三种等级.当卫星进入阴影区不能从太阳能电池阵得到功率或在阳照区太阳能电池阵提供的功率不足时,为保证母线电压稳定,蓄电池向母线提供电能,蓄电池放电调节器(Battery Discharge Regulator,BDR)在此过程中起主要作用.非隔离型Weinberg变换器虽然属于推挽变换器,但是没有磁芯不平衡的问题,而且还具有效率高、无右半平面零点和输入输出电流连续等优点,因而非常适用于蓄电池放电场合.另外非隔离型Weinberg变换器的输出侧有3个二极管,可以防止多模块并联时模块间产生环流及电流倒灌,易于并联使用.近年来,有许多学者针对非隔离型Weinberg变换器在BDR上的应用进行了大量的研究工作.文献[1-2]推导了非隔离型Weinberg变换器的主电路小信号模型.文献[3-5]建立了峰值电流控制下非隔离型Weinberg变换器的近似模型,并分析小占空比下的系统稳定性.文献[6]介绍了平均电流控制下隔离型Weinberg变换器小信号模型的建立过程.但没有文献论述基于多路非隔离型Weinberg变换器并联系统的峰值电流控制精确模型、均流控制策略及控制器的设计方法.常见采用峰值电流控制方法的变换器并联系统一般采用主从均流法或者最大值均流法实现均流,然而这两种方法均存在单点失效故障,因而不能用于卫星电源中.为解决以上问题,本文作者提出了改进型峰值电流控制策略,在此基础上以42 V电压等级的PCU为平台,针对非隔离型Weinberg变换器建立电感电流连续模式(CCM)下的系统小信号模型,并对控制环路进行设计.1 非隔离型Weinberg变换器图1为非隔离型Weinberg变换器(简称NIWC),其中 Q1、Q2为 MOSFET,D、D1和 D2为续流二极管,Lcouple为耦合电感,T为变压器,C为母线支撑电容,R为负载,CT为耦合电感与变压器的连接点.其中耦合电感的原副边自感均为L,若耦合系数为1,那么耦合电感的互感为2 L.文献[7-8]已对该变换器的工作原理做了详细介绍,因此不再赘述.图1 非隔离型Weinberg变换器Fig.1 Non-isolated WeinbergConverter(NIWC)系统额定输出功率为1 200 W,为保证效率及可靠性,本文采用三路并联的方式,即每路额定输出功率为400 W.NIWC的控制策略需使输出电压恒定在42 V,同时保证三路输出电流的均流误差小于1%.图2为NIWC三模块并联系统的控制框图.为提高系统的动态特性、防止变压器偏磁[9],该系统采用峰值电流控制.目前使用较多的均流方法包括下垂法、最大值均流法及主从均流法等[10],但下垂法的均流精度及负载调整率很差,主从均流法、民主均流法难以满足均流误差小于1%的要求,而且需使用均流母线,易发生单点故障,容错性差,因此均不适用于卫星电源.本文采用了改进型峰值电流控制策略,即电压环+平均电流环+峰值电流环的控制方法.其中电压环用于稳定母线电压,它的输出同时作为各支路电流环的基准,从而实现均流.由于峰值电流不能精确地反映输出电流的平均值,因此在峰值电流环与电压环之间加入平均电流环,以提高均流精度.只要各支路的电流采样系数一致,且电流环的设计满足采样值对于参考值的无差跟踪,即可实现高精度均流.为防止发生单点故障,电压环电路采用冗余设计,即三路PI并联选择中间值作为电压环的输入.改进型峰值电流控制策略适用于对均流精度及集成度要求很高的系统级场合.图2 改进型峰值电流控制下的NIWC三模块并联系统Fig.2 Three-module NIWC system with improved peak current control2 主电路小信号模型根据Middlebrook定理设计滤波器参数,使输入阻尼滤波器的输出阻抗在整个频段内均低于Weinberg电路的闭环输入阻抗,所以输入滤波器不会对变换器的稳定性产生影响[11],小信号建模时可以不考虑输入阻尼滤波器.根据状态空间平均法可得NIWC三模块并联系统在电感电流连续模式(CCM)下主电路的交流小信号模型,如图3(a)所示.为简化分析,假设各模块占空比的扰动量相等,即(t)=(t)=(t)=ˆd(t),此时图3(a)的三模块并联小信号模型可以等效为图3(b)的单模块小信号模型.图3 NIWC三模块并联系统的主电路小信号模型Fig.3 Power stagemodel of three-module NIWC system对比两图可以发现,由于等效单模块小信号模型为3个NIWC模块并联的结果,因此其输出侧的电感值为单个NIWC模块电感值的1/3[12].根据图3(b)可得从输出电压对占空比的传递函数 G vd(s)上看,NIWC三模块并联系统可以等效为电感量为4L/3的buck变换器,因此其传递函数不存在右半平面零点,易于控制系统的设计.3 系统小信号模型峰值电流控制下占空比与各扰动量间关系[9]为式中(t)为输入电压(t)为控制电流(t)为输出电流;ˆv ou t(t)为输出电压.式(5)中的系数其中 f s为等效开关频率,即MOSFET开关频率的两倍;D为与占空比之和;L为耦合电感自感;M a为斜坡补偿斜率.结合以上分析可得电感电流连续模式(CCM)下NIWC三模块并联系统的小信号模型,如图4所示.其中G v(s)为电压调节器的传递函数;G i(s)为电流调节器的传递函数;为峰值电流采样系数为平均电流采样系数;K v为输出电压采样系数.为保证电感电流的采样值与未等效前相等,峰值电流采样系数及平均电流采样系数分别为实际采样系数 K cs1、K cs2的1/3,其余系数保持不变.图4 NIWC三模块并联系统的等效单模块小信号模型Fig.4 Equivalent single-modulesmall signal model of three-module NIWC system电感电流的纹波与输入输出电压有关,当电感电流纹波很小时,F g、F v可以忽略,同时忽略输入电压的扰动量可得化简后的系统小信号模型,如图5所示,其中(s)为母线电容与负载并联的阻抗.图5中电流采样函数 H e1(s)与H e2(s)的引入,使得系统的延时及1/2开关频率处的不稳定性在小信号模型中得到体现[13].通过近似可得其中图5 化简后的系统小信号数学模型Fig.5 Modified small signal model4 控制器的设计为使系统满足幅值裕度大于10 dB,相角裕度大于60°,闭环输出阻抗小于50 mΩ的指标,需对控制环路进行设计.下面以输入电压26 V,输出功率1 200 W的额定工况为例,对闭环调节器进行设计.系统参数如下:输入电压范围26~38 V、负载电流范围0~30 A、母线电压42 V、开关频率 100 k Hz、母线电容2 mF、耦合电感自感20 uH、输出电压采样系数6.4/42、输出电流采样系数0.058 7、峰值电流采样系数0.333.4.1 电流内环控制器的设计图5中电压环为外环,电流环为内环,为防止系统不稳定,需使电流环的调节速度高于电压环的调节速度.因此设计时需使电流环的截止频率高于电压环的截止频率.电流环的控制对象为电流环环路增益为(s)=1时,(s)即为未补偿时的电流环环路增益(s).将电流环的截止频率设置为开关频率的1/10到1/5之间,现定为14.5 k Hz.未补偿时,T io(s)的截止频率为19.4 k Hz,幅值裕度为 9.9 dB,相位裕度为92.1°.此时 T io(s)在低频段的直流增益较小,会引起系统的稳态误差增大,因此需增加一个积分环节,以增大 T i(s)的直流增益;在高频段 T io(s)的对数幅频特性>0,放大了高频干扰信号,因此需要增加积分环节使(s)以大于-20 dB/dec的斜率下降,提高系统的抗干扰能力.根据以上要求,选择单零点双极点补偿器作为电流控制器(见图2),其传递函数为图6为补偿前后电流环环路增益的幅相曲线.补偿后 T i的截止频率为14.45 k Hz,幅值裕度为12.3 dB,相位裕度为91.5°,满足设计要求.图6 补偿前后电流环路增益的幅相曲线Fig.6 Bode plot of current loop gain T i(s)and T io(s)4.2 电压外环控制器的设计电压环的控制对象为电压环环路增益为G v(s)=1时,T v(s)即为未补偿时的电压环环路增益 T vo(s).将电压环的截止频率设置为1 kHz,以满足电压环截止频率低于电流环截止频率的要求. 未补偿时,T vo(s)的幅频曲线均在0 dB以下,因此系统不稳定.为了提高系统的直流增益,保证较高的稳态精度和较好的稳定性,选择单零点单极点补偿器作为电压控制器,如图2所示,其传递函数为=10 kΩ,那么R v1≈300 kΩ.将电压控制器的零点频率设置为100 Hz,即可求出C v1≈5.4 nF.补偿前后电压环环路增益幅相曲线如图7所示.补偿后 T v(s)截止频率为1 kHz,幅值裕度为35.5 dB,相位裕度为84.7°,均满足设计要求.图7 补偿前后电压环路增益的幅相曲线Fig.7 Bodeplot of voltage loop gain T v(s)and T vo(s)4.3 影响稳定裕度的因素图8 为负载电流30 A,输入电压分别为26 V、30 V、34 V、38 V时电压环路增益的幅相曲线簇.由图8可知随着输入电压的上升,幅值裕度与截止频率略有增加,相角裕度有所减小,但均能满足指标要求.图8 负载电流为30 A时电压环路增益的幅相曲线簇Fig.8 Bode plot of Tv(s)when I out=30 A图9 为输入电压26 V,负载电流分别为6 A、15 A、22 A、30 A时电压环路增益的幅相曲线簇.从图9上可以发现随着负载电流的上升,幅值裕度与截止频率几乎不变,而相角裕度略有增加;负载电流对于幅相曲线的影响主要体现在低频段.图10为输入电压26 V,总输出功率为1 200 W,并联模块数分别为1、3、6时电压环路增益的幅相曲线簇.由图10可知当输出功率固定时,随着并联模块的数量的增加,电压环路增益的幅值裕度和相角裕度减小,截止频率增加.因此并联模块数越多,系统的稳定裕度越小,但动态特性越好.实际并联模块数量的选择需要折中考虑.图9 输入电压26 V时电压环路增益的幅相曲线簇Fig.9 Bode plot of T v(s)when V g=26 V图10 并联模块数分别为1、3、6时电压环路增益的幅相曲线簇Fig.10 Bode plot of T v(s)with 1,3,6 modules when V g=26 V and P out=1 200 W4.4 闭环输出阻抗的分析在控制框图中引入负载电流的扰动量,以求解系统的闭环输出阻抗,如图11所示.图11 闭环输出阻抗的系统小信号框图Fig.11 System small signal model of close-loop output impedance系统的闭环输出阻抗可由下式其中由图12可知NIWC三模块并联系统的最大输出阻抗为41.4 mΩ,满足小于50 mΩ的要求,可见该并联系统具有很好的负载调整率.图12 闭环输出阻抗Fig.12 Bode plot of close-loop output impedance5 实验结果根据以上理论设计,搭建一套额定功率为1 200 W的NIWC三模块并联系统试验平台进行验证.5.1 稳态实验结果图13为输入电压32 V时的驱动脉冲、CT点电压、DS端电压及耦合电感原边电流波形.当输入电压为26~38 V,输出电流为0~30 A时,输出电压均能稳在42 V,电路稳定工作.图13 NIWC的稳态波形Fig.13 Key waveforms of NIWC表1为输入电压32 V时未采用均流控制策略、采用传统峰值电流控制策略和采用改进型峰值电流控制策略时的均流特性,其中均流度按照下式计算各模块输出电流与平均电流的最大差异.由表1可知未采用均流控制策略时,模块均流度差,不利于系统稳定运行;采用传统峰值电流控制策略时各模块能保证基本均流,但是不能满足1%的均流指标;采用改进型峰值电流控制策略时全工况下均流误差均小于1%,该均流误差主要是由于各支路的电流采样系数不完全一致造成的.以上结果证明了改进型峰值电流控制策略的优越性.表1 采用三种控制策略时的均流特性Tab.1 Current sharing performanceunder threecontrol strategies分类 I out1/A I out2/A I out3/A CS error/%2.892 1.851 1.228 45.3 5.123 3.376 2.595 38.5未采用均流6.983 5.345 3.681 31.02控制策略8.565 7.252 5.248 25.25 10.372 8.651 6.985 19.64 11.389 9.475 8.152 17.75 2.332 2.023 1.679 16.52 3.921 3.825 3.291 10.55采用传统5.875 5.328 4.805 10.1峰值7.561 6.936 6.484 8.11电流控制9.413 8.541 8.174 8.08 10.353 9.451 9.212 7.04 2.018 2.003 1.999 0.56 3.682 3.651 3.687 0.608采用改进5.371 5.323 5.316 0.643峰值7.031 7.0156.934 0.848电流控制8.701 8.674 8.645 0.327 9.69 9.665 9.641 0.255 5.2 动态实验结果图14为负载电流以50 Hz的频率在20 A与30 A之间跳变时母线电压的瞬态波形.此时母线电压尖峰为0.285 V,恢复稳态的时间为6.2 ms.可见系统具有优异的动态响应性能.图14 负载在20 A与30 A之间跳变时母线电压波形Fig.14 Transient responsefor load changes from 20 A to 30 A图15 为负载跳变时各模块输出电流的波形,从波形上看不论是稳态还是动态均流特性都十分优异.电流控制器的参数为=8 kΩ=10 kΩ,C i1=240 pF.图15 负载在20 A与30 A之间跳变时系统动态均流波形Fig.15 Transient current sharing performance for load changes from 20 A to 30 A6 结论本文根据NIWC的工作原理,推出NIWC的三模块并联系统在电感电流连续模式(CCM)下的等效单模块主电路小信号模型,从小信号模型上看,该并联系统可以等效为电感为4L/3的buck电路,因此该并联系统的控制系统易于设计.为提高系统的动态特性、防止变压器偏磁,同时考虑到卫星电源对于均流精度及电路可靠性要求很高,本文提出了改进型峰值电流控制策略,并以幅值裕度大于10 d B、相角裕度大于45°、输出阻抗小于50 mΩ为设计目标,对控制环路进行设计.分析各参数的变化对于稳定裕度的影响可知:1) 输出电流不变,随着输入电压的上升,幅值裕度与截止频率略有增加,相角裕度有所减小.2) 输入电压不变,负载电流对于幅相曲线的影响主要体现在低频段.3) 随着并联模块的数量的增加,系统的稳定裕度变差,但动态特性越好.根据设计得到的控制环路参数搭建一套1 200 W的实验平台进行验证,实验结果表明基于改进型峰值电流控制策略的NIWC并联系统在所有工况下均能稳定工作并且具有优异的稳态和动态均流性能.但由于并联模块共用一个电压外环,因此改进型峰值电流控制策略不适用于模块化程度较高的系统.参考文献(References):[1]Lei Weijun,Wan Chengan,Han Bo.Modeling analysis and study of the Weinberg converter with current programming control for space application[C]∥Proceedings of the 8th European Space Power Conference,Konstanz,Germany,2008.[2]Lei Weijun,Li Yanjun.Small-signal modeling and analysis of the weinberg converter for high-power satellites bus application[J].Chinese Journal of Electronics,2009,18(1):171-176.[3]Ejea Marti J,Sanchis Kilders E,Maset E,et al.Phase margin degradation of apeak current controlled converter at reduced duty cycle[J].IEEE Transactions on Power Electronics,2010,25(4):863-874.[4]Ejea Marti J,Sanchis Kilders E,Maset E,et al.Stability problems of peak current control at narrow duty cycles[C]∥Proceedings of IEEE Conferenceon Applied Power Electronics,Burjassot,Spain,2008:1549-1554.[5]Ejea Marti J,Sanchis Kilders E,Maset E.Peak current control instabilities at narrow duty cycles[C]∥Proceedings of IEEE Conference on Computational Intelligence and Security Workshops,Burjassot,Spain,2008:476-482. [6]Hung ChingYao,Lee C Q,Lee H T.Modeling of high power DC/DC converter system based on Weinberg topology[C]∥Proceedings of IEEE Conference on Power Electronics Specialists,Chicago,United States,1995:1222-1228.[7]Maset E,Ferreres A.5 k W weinberg converter for battery discharging in high-power communications satellites[C]∥Proceedings of IEEE Conferenceon Power Electronics Specialists,Burjassot,Spain,2005:69-75. [8]Maset E,Ejea J B,Ferreres A.High-efficiency weinberg converter for battery discharging in aerospace applications[C]∥Proceedings of IEEE Conference on Applied Power Electronics,Burjassot,Spain,2006:1510-1516.[9]Robert W Erickson.Fundamentals of power electronics[M].2nded.Massachusetts:Kluwer Academic Publisher,2001:462-504.[10]Luo Shiguo,Ye Zhihong,Lin Ray Lee,et al.A classification and evaluation of paralleling methods for power supply modules[C]∥Proceedings of IEEE Conference on Power Electronics Specialists,Blacksburg,United States,1999:901-908.[11]Middlebrook R D.Design techniques for preventing inputfilter oscillations in switched-mode regulators[C]∥Advances in Switched-Mode Power Conversition,TESL Aco,Pasadena,CA,1983:153-158.[12]Choi B,Cho B H,Ridley R B,et al.Control strategy for multi-moduleparall el converter system[C]∥Proceedings of IEEE Conference on Power Electronics Specialists,Blacksburg,United States,1990:225-234. [13]Kazimierczuk M K.Transfer function of current modulator in PWM converters with current-mode control[J].IEEE Transactions on Circuits and Systems I,2000,47(9):1407-1412.。
一种应用于单相光伏微型逆变器的电路拓扑分析

d. 桥式逆变负载电流波形图
e.原边电流i 1的波形图
f.副边电流i 2的波形图
图5 仿真各波形图
表1 不同占空比下的前级升压及逆变电路的整体效率
占空比D 桥式逆变输出电压 U O 有效值/V
0.8350.00.7222.70.6146.00.5120.00.495.0时间/ms
时间/ms
时间/ms
440
124801026-2
500
480460
231.90231.94231.92231.96231.91231.95231.93231.97
520
540
70.69
70.72
70.68
70.71
70.70和二极管反向恢复电流造成i 1的波形与理论存在误差,而图5f 中i 2的波形基本与理论分析一致。
另外,本次仿真实验改变占空比D ,得到不同的前级升压等级,由此得到后级逆变电路的不同输出电压、电流及该条件下升压电路和逆变电桥式逆变负载电流
位移/mm
图8 负风作用下位移分布
采用牛顿-拉普森计算方法和以离散化理论为基础的节点位移法[5],进行几何非线性(大位移)分析,考察结构在变形后的再平衡,即确定荷载态构形和结构各单元的内力变化。
6 结语
1)位移较大的单层悬索体系不适合光伏阵列直接悬挂。
2)索桁架的预应力的建立是其获得必要的结构刚度和形状稳定性的必要措施。
3)预应力结构要考虑零荷载态(构的加工状态)、预应力态(仅预应力或预力与自重共同作用)及荷载态(全部荷载,考虑多荷载组合),并进行张拉全过程模分析及评价。
4)张拉过程分析是优选预应力张拉方案的基 (接第41页)
参考文献。
一种基于坐标变换的剩余电流提取方法

一种基于坐标变换的剩余电流提取方法舒成维;王承民;谢宁【摘要】从安规角度分析了非隔离型光伏并网逆变器系统中普遍存在的共模电流问题,并将其分解成漏电流和剩余电流.以全桥电路为例建立了共模电压回路分析模型,并探寻影响漏电流和剩余电流大小的因素及其两者的特征.根据两者的特征提出一种基于坐标变换的提取方法,同时因为该方法需要构建虚拟垂直信号,所以引入一种基于二阶广义积分器的正交信号发生器(Second-order Generalized Integrator Quadrature Signals Generator,SOGI-QSG)完成信号处理.实验证明:该方法能精确计算各种成分,并能自适应于电网频率,具有实用价值.【期刊名称】《电力系统保护与控制》【年(卷),期】2018(046)015【总页数】9页(P111-119)【关键词】光伏并网逆变器;漏电流;剩余电流;帕克变换;SOGI-QSG【作者】舒成维;王承民;谢宁【作者单位】上海交通大学电气工程系,上海 200240;上海交通大学电气工程系,上海 200240;上海交通大学电气工程系,上海 200240【正文语种】中文光伏并网发电技术因为自身独有的绿色无污染等优势,近些年得到了大力推广,在主要经济体中占据了一席之地。
近年来,我国因环境治理和温室气体排放等原因也在大力推广光伏发电,最近又提出了光伏扶贫计划,使得光伏发电逐渐走进千家万户。
并网逆变器是光伏发电的关键环节,一般有隔离型和非隔离型两种类型。
隔离型逆变器实现了隔离,同时具有可以提供不同电压等级和直流分量抑制等优点,但是逆变器体积大、重量大且效率低,即使采用高频隔离方案效率仍然较低;而非隔离型逆变器则拥有转换效率高,体积、重量和成本低的优势,现在得到广泛应用。
非隔离型逆变器直接与电网连接,面板对地等效电容、逆变器和电网三者形成回路,必然会导致共模电流的增大,带来人身安全隐患。
有很多专家学者从各个方面研究改进:文献[1-2]从拓扑结构入手提出了新的结构;文献[3]从调制方式入手,保持共模电压的恒定,从而减少漏电流;文献[4]从控制着手作补偿,减少共模电流;文献[5]提出了改变滤波电感、增加共模并联回路分流、调整矢量组合和改变开关频率等策略抑制共模电流;文献[6]总结了常见的单相机拓扑类型,并提出了四种抑制途径;文献[7]对漏电流抑制技术作了一定程度的总结和展望,基本上也是从拓扑结构、调制方式和改变系统参数的角度;文献[8]采用有限集预测改进。
光伏微网并网逆变器下垂控制策略改进研究
光伏微网并网逆变器下垂控制策略改进研究韩庆;施伟锋【摘要】传统下垂控制策略广泛应用于光伏微网并网逆变器控制,但是没有考虑在低压微网系统中由于线路阻抗比较大引起的功率耦合问题,以及多个微电源供电时系统功率分配不均衡问题.针对这些问题,本文在传统下垂控制基础上,应用坐标变换对有功功率与无功功率进行耦合控制,又通过在电压电流环之中加入虚拟动态阻抗环,提出一种基于电压-电流-阻抗三环控制的光伏微网并网逆变器控制策略.该策略随电压电流的波动而改变虚拟阻抗值,合理分配系统的有功和无功功率,在系统稳定时自动切除虚拟动态阻抗,减小系统的功率环流和线路的损耗,同时限制系统的电压降落,提高电网的电能质量.最后,仿真实验验证该改进控制策略的有效性和可行性.【期刊名称】《船电技术》【年(卷),期】2018(038)005【总页数】6页(P47-52)【关键词】光伏微网;下垂控制;虚拟动态电阻;功率分配;并网逆变器【作者】韩庆;施伟锋【作者单位】上海海事大学物流工程学院,上海 201306;上海海事大学物流工程学院,上海 201306【正文语种】中文【中图分类】TM727随着全球能源危机的日益加重,环境污染问题日渐突出,作为应对措施之一,新能源发电技术在现代电力系统中得到广泛应用,由不同分布式电源组成的微网系统的研究被国内外专家学者广泛的关注[1]。
微网是由分布式电源、负载、储能装置、能量转换装置、监控和保护等装置组成的小型发配电系统。
目前,如何提高微网并网运行功率平稳性和并网的快速性成为微网研究的热点问题之一[2]。
下垂控制是实现多个微电源并网供电的主要控制策略,由于只需要检测逆变器的运行情况,无需逆变器之间的通讯联系[3],所以下垂控制策略被广泛应用于并网逆变器的对等控制中。
微网线路较短与线路电压等级较低的特点决定了其感抗与电阻为同一数量级,无法与长距离输电线路一样作等效处理,传统的下垂控制在微网系统中直接应用有功功率与无功功率控制,这必然会引起有功功率与无功功率之间的耦合问题,从而导致微网系统运行的不平稳以及不同微电源之间有功功率与无功功率分配不平衡的问题[4]。
阶梯阻抗变换宽带功分器设计 - - EEFOCUS
(6-b)
Amplitude (dB)
-10 -15 -20 -25 -30 -35 -40 -45
1 2 3 4 5 6
S12 S13 S23
(6-c) (6-d)
7
8
9
10
Frequency (GHz)
A = tg 2θ k1 + tg 2θ k 2
B=
tg 2θ k1 =
图5
输入输出端口耦合参数以及输出端口 之间的隔离度曲线
π wq
tg 2θ k 2 =
8 −1 (3 − 2) cos 2 θ1
R为终端阻抗, 根据奇偶模分析法, 功分器中R 一般取值为2。 Tn 是n阶第一类多项式,其中
ε
式的 Tn (
2
r
=
( R − 1) 2 1 2 4 R Tn (1/ µ0 )
(3)
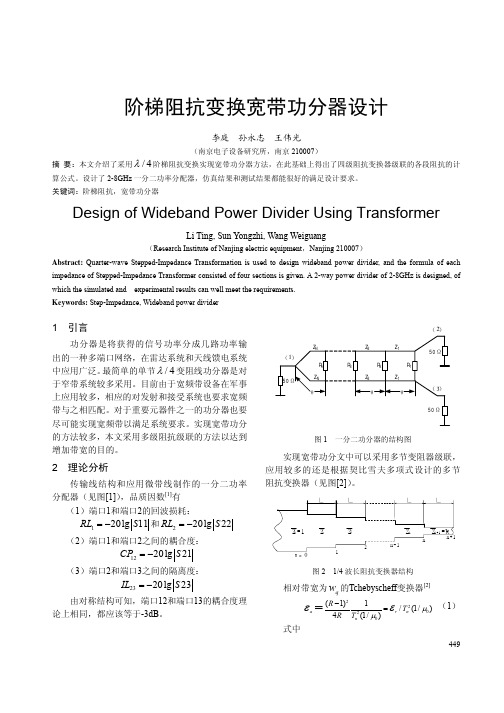
由上面公式,得出各节阻抗线的归一化阻抗值 为1.116, 1.296, 1.544, 1.793。 再根据微带线准TEM [4] 模综合方法 得出各节阻抗线宽度分别为0.56mm, 0.75mm,1.02mm,1.30mm,1/4波长阻抗线的长度 为11.1mm。
结论本文给出了采用契比雪夫原型的多级阻抗级联的宽带功分器的设计方法并给出了阻抗变换节数的计算公式最后对工程中常用28ghz的功分器进行仿真和加工测试结果表明能够很好的满足工程要求可以为工程上设计宽带功率分配器提供选择
阶梯阻抗变换宽带功分器设计
李庭 孙永志 王伟光
(南京电子设备研究所,南京 210007) 摘 要:本文介绍了采用 λ / 4 阶梯阻抗变换实现宽带功分器方法,在此基础上得出了四级阻抗变换器级联的各段阻抗的计 算公式。设计了 2-8GHz 一分二功率分配器,仿真结果和测试结果都能很好的满足设计要求。 关键词:阶梯阻抗,宽带功分器
微源并网逆变器下垂控制策略的改进研究

S U N Y u n - l i n g , HU AN G We i , WAN G G u a n — n a n , WA NG We n - j u n
( S c h o o l o f E l e c t r o n i c a n d E l e c t r i c a l E n g i n e e r i n g , N o a h C h i n a E l e c t r i c P o w e r U n i v e r s i t y , B e i j i n g 1 0 2 2 0 6 , C h i n a )
于此控制策 略的微 电网仿真模 型, 仿真结果验证 了此控制策略 的有效性。 关键词 : 微 网: 下垂控制 ; 非线性特性 ; 前馈环节; 小干扰分析 中图分类号: T M 4 6 4 文献标志码 : A 文章 编号 : 1 6 7 3 — 7 5 9 8 ( 2 0 1 3 ) 0 1 - 0 0 0 6 - 0 5
Ab s t r a c t : B i g d r o o p c o e f i c i e n t s t e n d t o r e d u c e s t a b i ] i t y o f mi c r o — g r i d, w h i l e s n l a ] 1 d r o o p c o e f i f c i e n t s r e s u l t i n s l o w r e s p o n d i n g o f i n v e r t e r . I n o r d e r t o o v e r c o n l e t h e d i s a d v a n t a g e , t h e p a p e r p r o p o s e s a k i n d o f d r o o p c o n t r o l s t r a t e g y b a s e d o n n o n l i n e a r d r o o p
基于d—q变换的微电网PQ控制
基于d—q变换的微电网PQ控制作者:侯海涛霍彦明焦立春来源:《山东工业技术》2017年第15期摘要:基于d-q变换的前馈解耦PQ控制,可使微电源发出的有功及无功功率恒定,是目前微电网的主流控制策略之一。
本文采用MATLAB中的SIMULINK模块搭建了系统仿真模型。
该模型中的并网逆变器在输出有功功率的同时补偿一定量的无功功率,并且使用了LCL 滤波器技术、锁相环技术。
为了使用参数时更加方便,本文对某些参数进行了标幺化。
最后通过运行仿真模型测得THD畸变略小,达到了控制要求。
关键词:变换;微电网;PQ控制DOI:10.16640/ki.37-1222/t.2017.15.1601 恒PQ控制策略PQ控制主要用于并网运行模式,是指对并网逆变器输出的有功功率和无功功率进行控制[2]。
由式1-1可知电网电压存在着耦合关系:(1-1)为了实现解耦控制需要从静止abc坐标系下转换为dq坐标系(称为Park变换,或dp变换)。
经过dp变换可得:(1-2)ud和uq均为常数实现了解耦控制。
PQ控制策略框图如图1所示。
三相交流电通过锁相环(PLL)得到电压和电流的相位,该角度用于Park变换中。
三相电压和电流经过Park变换,得到dq0分量。
通过式子(1-2)可以得到逆变器输入的参考无功功率和有功功率。
(1-3)再通过PQ计算器得到控制电流。
将控制电流与实际值比较,将结果输入到PI控制器中,最后转换到abc静止坐标系下得到并网逆变器输出的三相交流电。
2 PQ控制策略MATLAB/SIMULINK模型搭建2.1 LCL滤波器的设计微电网在并网时可看做受控电流源。
其中的逆变器发出的电流波形具有一定的谐波,为了抑制其产生的谐波,提高并网质量,通常需要接通低通滤波器。
在传统的微电网中采用L滤波器。
为了抑制高次谐波需要增大电感值,这样所使用的电感体积增大,会对整个系统带来一定的损耗。
为了解决以上问题,本文采用LCL滤波器。
期刊16 基于虚拟阻抗的VSG控制策略研究

步发电机一样或近似的输出特性,其主要体现在下 垂特性和旋转惯量2个方面[81。因此,本文采用了转 子运动方程和同步发电机的机电暂态方程来模拟 SG的运行和控制.其中引入了定子侧的电气方程, 而非磁链方程。图1为VSG的基本结构框图,其控制 部分主要由功率控制部分和电压电流双环控制部 分组成,功率控制部分包含调速器、励磁控制器和 虚拟同步发电机的算法。其中,SW为大电网与微电 网连接处的转换开关,控制信息通过正弦脉宽调制
用于微电网【12 J,但通过在VSG的电压电流环中引入
虚拟阻抗,将其逆变器的输出阻抗等效为感性,使
VSGr~I匕够继续采用经典的下垂控制。另外,控制器类
型及参数对逆变器的等效输出阻抗及其功率分配 的影响也很大,虚拟阻抗的引入可将逆变器的输出 阻抗加以修正m】,所以.虚拟阻抗的重要性不言而 喻。在本文中,虽然模拟同步发电机的dqO模型,但 其输入输出仍是abc坐标系下的电流电压,只是在
电压电流控制环的设计
微电网的线路阻抗主要为阻性,不同于高压线
控制,可提高系统的动态性能。其中k为内环P控制
器系数,K陬M为逆变器等效模型,磊,为虚拟阻抗,£,C 为Lc滤波器参数,厶,已分别表示在s域中L与电压导 数的乘积,C与电流导数的乘积;u一为电压环参考电 压,Ltoak.,,i山分别为输出电压、电流。 路中的感性阻抗特性,原有经典的下垂控制已不适
叫=器材
式中:J--Joto。D=Do∞。 万方数据
(4)
陕西电力
第44卷
式中:P。,P2分别为逆变器DGl.DG2所承担的有功功 率。同理,无功功率分配也遵循这样的原则。 图5为加入虚拟阻抗后的电压电流双闭环控制 框图。外环是电压控制环,采用PI控制.可改善系统 电压输出波形的精确性;内环是电流调节环,采用P 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 34 卷增刊 1
张 波等 基于坐标变换的微源逆变器虚拟复阻抗功率分配方法
213
0 引言
近 年 来 , 越 来 越 多 的 分 布 式 电 源 ( Distributed Generation, DG)通过并网逆变器等电力电子设备接 入到传统电力系统中[1-6],通过对分布式接入的微源逆 变器控制,可以实现负荷合理分配和系统冗余[7-8]。 文 献 [9-11] 指 出 在 现 有 的 多 微 源 逆 变 器 并 联 运 行 控 制技术中,基于逆变器输出下垂特性的无互连线控 制方式是最为常见的。然而,微网中各台并网逆变 器等效输出阻抗特性之间存在差异,所造成的功率 耦合和功率环流等问题直接影响到微源逆变器的下 垂控制效果。
Zhang Bo1 Li Dongxue1 Yan Xiangwu1 Huang Yibin2 Wang Desheng1 (1. Key Laboratory of Distributed Energy Storage and Micro-Grid of Hebei Province
North China Electric Power University Baoding 071003 China 2. State Grid Hebei Electric Power Corporation Shijiazhuang 050000 China)
Keywords:Parallel inverter, power decoupling, coordinate conversion, virtual complex impedance, power distribution
河 北 省 自 然 科 学 基 金( E2 01 95 02 11 9 )、河 北 省 高 等 学 校 科 学 技 术 研 究 项 目( Z2 01 71 32 )和 中 央 高 校 基 本 科 研 业 务 费 专 项 基 金( 2 01 7MS 0 88 , 2018MS088)资助。 收稿日期 2018-07-01 改稿日期 2018-10-15
2019 年 6 月 第 34 卷增刊 1
电工技术学报
TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY
DOI: 10.19595/ki.1000-6753.tces.L80278
Vol.34 Sup.1 Jun. 2019
基于坐标变换的微源逆变器虚拟复阻抗
功率分配方法
张 波 1 李冬雪 1 颜湘武 1 黄毅斌 2 王德胜 1
(1. 华北电力大学河北省分布式储能与微网重点实验室 保定 071003 2. 国网河北省电力有限公司检修分公司 石家庄 050000)
摘要 微电网中线路的阻抗特性与微源逆变器的功率解耦控制、环流抑制、电能质量等问题 密切相关。针对传统虚拟阻抗控制容易引起公共连接点电压幅值跌落、控制鲁棒性差以及线路电 阻漂移造成系统失稳等不足,提出基于坐标变换的微源逆变器虚拟复阻抗功率分配方法,通过引 入虚拟复阻抗控制环实现并联运行的微源逆变器功率输出的精确解耦以及等效线路阻抗的匹配, 从而使得负荷功率按微源逆变器容量比例进行精确分配。仿真和实验结果验证了所提控制方法的 有效性。
关键词:逆变器并联 功率解耦 坐标变换 虚拟复阻抗 功率分配 中图分类号:TM46
Virtual Complex Impedance Power Distribution Method for Micro-Source Inverter Based on Coordinate Transformation
Abstract The impedance characteristics of the line in microgrid are closely related to the power decoupling control of micro sources inverter, circulation suppression, power quality and so on. Traditional virtual impedance control can easily cause voltage drop of common connection point, control robustness difference, and the deficiency of system instability caused by line resistance drift, a virtual complex impedance power sharing method for micro sources inverter based on coordinate transformation is proposed, the power output of parallel micro sources inverter is decoupled precisely and the equivalent line impedance is matched by virtual complex impedance control loop, the load power is effectively distributed according to the capacity ratio of the micro sources inverter. Simulation and experimental results verify the proposed method.
文献[5-6]提出了虚拟功率法,通过坐标变换可 以实现虚拟功率的解耦:文献[5]指出,当负荷功率 过度变化超出微源功率吞吐极限时会影响系统的稳 定运行,并提出了相应的下垂限幅控制算法;文献 [6]应用虚拟坐标变换下垂控制策略,实现了微电网 由并网模式至孤岛模式的平滑切换,但由于各并联 运行的逆变器输出阻抗和线路阻抗存在差异,实际 的功率分配效果甚至不及传统下垂控制策略。