基盘升沉补偿系统的设计和分析_徐宝富
3钻井平台升沉补偿系统
钻井平台升沉补偿系统
第一节 海洋浮动钻井船的升沉补偿装置
(1)浮动天车 它通过滚轮在垂直轨道内移动。
天车本身除具有普通天车的滑轮外,另多装有两个辅 助滑轮,辅助滑轮的轴与天车滑轮的轴之间用连杆连 接。快绳及死绳分别通过两个辅助滑轮引出。 这样,当天车沿着垂直轨道移动时,只是辅助滑轮轴 动作,而通过辅助滑轮的钢丝绳与滑轮间无相对运动 ,可延长钢丝绳的寿命。
钻井平台升沉补偿系统
第一节 海洋浮动钻井船的升沉补偿装置
2.工作原理 1)补偿升沉
由浮动天车来实现补偿。当浮动平台上升或下降时井 架沿轨道上下运动,主气缸中气体压缩或膨胀,相当 于一个大弹簧,而天车及大钩基本上保持不动,于是 升沉运动得以补偿。
2)控制钻压 司钻利用甲板上的调压阀,控制自空气罐至主气缸系 统的空气压力,使井底钻压调至合适值。
二、升沉补偿装置的结构类型与工作原理
(一)游动滑车与大钩间装设的升沉补偿装置
1.结构 如图1-13a所示, 它主要有以下几 部分:
钻井平台升沉补偿系统
第一节 海洋浮动钻井船的升沉补偿装置
1)液缸 两个液缸用上框架与游动滑车相连,随平台升沉而上 下运动。 2)活塞 两个液缸中的活塞通过活塞杆与固定在大钩上的下框
钻井平台升沉补偿系统
第一节 海洋浮动钻井船的升沉补偿装置
为了密封管内外的泥浆以及平衡缸,伸缩钻杆配置有
四组密封。每组密封由主密封、挡圈、隔离环组成。 主密封材料系耐高温的合成橡胶,挡圈材料为玻璃纤 维,隔离环由含尼龙纤维的橡胶制成,用以挡住硬的 小颗粒。
为了使伸缩钻杆的外圆不易磨损,在其顶部安装有防 磨环,环外圆堆焊硬质合金。 多节式伸缩钻杆一般采用螺纹连接。
升沉补偿系统实验平台设计

实 验 技 术 与 管 理 第38卷 第1期 2021年1月Experimental Technology and Management Vol.38 No.1 Jan. 2021ISSN 1002-4956 CN11-2034/TDOI: 10.16791/ki.sjg.2021.01.019仪器设备研制升沉补偿系统实验平台设计王玉红1,2,杜慧子1,许晨光1,李豪杰1,梁 旭1,2(1. 浙江大学 海洋学院,浙江 舟山 316000;2. 浙江大学 浙江省海上试验科技创新服务平台,浙江 舟山 316000)摘 要:海上作业时母船或平台受到海浪影响会产生大幅升沉运动,影响作业安全与工作效率,升沉补偿装置可以极大地改善海上工作环境。
针对升沉补偿装置的研究和学生实验的教学需要,该文设计了一种升沉补偿系统实验平台,采用六自由度平台模拟真实的海上船只升沉运动,采用液压系统模拟负载在海上的受力情况,从而可以真实地反映海上工作情况。
将主动控制系统、被动控制系统、半主动控制系统集成到升沉补偿系统中,可以清楚地对比不同控制方式各自的优势和不足,使学生更加深入地了解升沉补偿装置的控制机理,尝试更加复杂的控制算法来实现更优秀的补偿效果,激发学生的学习兴趣,进而提高实验教学效果。
关键词:升沉补偿系统;实验教学平台;液压系统中图分类号:G642.423; TH-39 文献标识码:A 文章编号:1002-4956(2021)01-0088-05Design of experimental platform for heave compensation systemWANG Yuhong 1,2, DU Huizi 1, XU Chenguang 1, LI Haojie 1, LIANG Xu 1,2(1. Ocean College, Zhejiang University, Zhoushan 316000, China;2. Zhejiang Province Offshore Test Technology Innovation Service Platform, Zhejiang University, Zhoushan 316000, China)Abstract: Affected by the sea waves, the mother ship or platform will have a large heave movement, which will affect the safety and working efficiency of the operation. The heave compensation device can greatly improve the marine working environment. According to the needs of research and students’ experimental teaching, a heave compensation system experimental platform is designed. The experimental platform uses a six-degree-of-freedom platform to simulate the real heave motion of a ship at sea. The hydraulic system is used to simulate the load in the working process, and then it can truly reflect the working situation at sea. The heave compensation device integrates the active control system, passive control system, and semi-active control system and other parts, which can clearly compare the advantages and disadvantages of different control methods. It can enable students to understand the control mechanism of heave compensation device more deeply, try more complex control algorithm to achieve better compensation effect, stimulate their interest in learning, and improve the experimental teaching effect.Key words: heave compensation system; experimental teaching platform; hydraulic system二十一世纪是海洋的世纪,海洋对国家的生存发展具有重要的战略意义[1]。
211048413_深海作业主动升沉补偿起重机
深海作业主动升沉补偿起重机张光锋 陈 刚 胡 茂 姬红斌武汉船用机械有限责任公司 武汉 430084摘 要:当前深海作业对海洋工程装备的要求不断提高,主动升沉补偿起重机应运而生。
文中在国内外研究成果基础上,从环境适应性、补偿系统与起重机适配性、补偿系统与起重机功率集发等关键技术出发,介绍了起重机研制过程中的技术路线,设计制造了一种具有能量回收功能的深海作业主动升沉补偿起重机结构样机,采用折臂式结构形式和绞车式主动升沉补偿系统,并对样机进行试验验证,起重机起吊能力达到200 t,试验结果与国外同类型吊机参数进行了对比总结,样机补偿精度超95%。
关键词:深海作业起重机;主动升沉补偿;能量回收;二次控制单元中图分类号:TH213 文献标识码:A 文章编号:1001-0785(2023)06-0050-05Abstract: Recently, with the increasingly demanding requirements for offshore engineering equipment in deep-sea operation, the application of active heave compensation crane came into being. In this paper, based on the research results at home and abroad, starting from the key technologies such as environmental adaptability, adaptability between compensation system and crane, compensation system and crane power collection and development, the technical route in the development process of crane is introduced, and the design of an active heave compensation crane structure prototype with energy recovery function is put forward. The prototype is equipped with a folding arm structure and a winch active heave compensation system, and the prototype is verified by experiments. The lifting capacity of the crane reaches 200 t. Comparing the test results with the parameters of similar cranes abroad, it is found that the compensation accuracy of the prototype is over 95%.Keywords:deep-sea crane; active heave compensation; energy recovery; secondary control unit0 引言用于深海安装作业的水面工作母船受到海面风浪流的干扰影响将产生空间的波频摇荡运动。
深海设备的升沉补偿系统
主动腔依靠旁路阀门连接起来 。主动模式时,阀门是关闭的。打开阀门时 ,主动部分失
()被动 油缸 和主 动油缸平 行 ( 5 ; 2 图 ) ()集 主动和被 动 功能 于一体 的单油 缸 ( 6 。 3 图 )
图 4 被动油缸 和主动油缸成 一直线
选 择综合 性 能油缸 是 因为它 紧凑 ,滑轮 支撑 简单 ,没有 滑 轮头部 导 向结构 ,并 且摩
擦 最小 。
该 油缸设 计 成包含 三个 独立 区域 :像 下面描 述 的一样 ,一 个连接 着 被动 系统 ,两个 连 接着 主动 系统 。
22系统说 明 .
图7 所示为系统的设计框图, 油缸在 中间, 主动系统和被动系统各 自独立, 分布两边。 被动部分 由四个压力容器组成 ,其压力可以由操作者使用两个空压机充气或者放掉 空气进行调节 。操作者通过打开或关闭阀门来选择压力容器进行工作 。压力经过油气分 离器 到 达油缸 被动 区域 。在 油气分 离器 和油 缸之 间 ,安装 了一个 隔离 阀可 以用 来锁 定油
()载荷 到达海 底并 且需 要更 正其 在海底 位置 时 的不稳定 情 况 ; 3 ()繁 多的 R V辅助 操作 引起 的动载 荷 。 4 O 考 虑到 负载 和钢缆 长度 ,升 沉补偿 起 吊机如 果装在 船上 ,能力有 限 。
针对 “ o adP g s Nr n r r s m o e ”号船的情况 ,确定使用现有的甲板绞车。该绞车具有 高负
高速度 ) 。
图 1 “ onn r r s N nadPo e ”号作业 船 gs
图2 A型架结构的绳索布置 图
新型升沉补偿试验系统的仿真设计
摘 要: 为能更准确地对 波浪升沉补偿系统进行研究 , 设计一种基于数字液压技术 的新 型试 验系统 , 采用
Se r 平台结构模拟船舶 的六 自由度 运动 , twat 以数 字液 压缸 作为驱 动器 对重 物升沉 进行 补偿 。在 L b E a VI W 仿真环境下运 用广义预测与 P D控制策 略, I 实现 了对升沉补偿试 验系统 的设 计 。结果 表 明, 系统仿 真相似 该
标 系 下 , 采 用 RPY(ol i hy w) 描 述 。 拟 r l pt - a 角 — c
构形 式 具 有 结 构 布局 合 理 、 度 高 、 度 大 、 动 精 刚 运 速度 高 的特 点 。
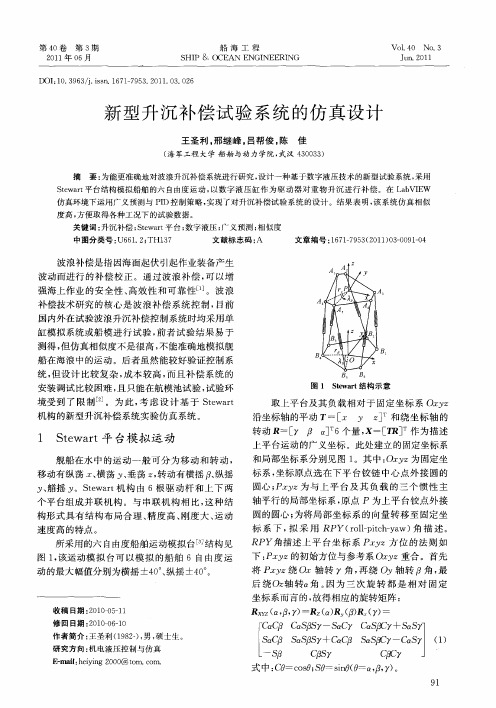
所采 用 的六 自由度 船舶 运动 模拟 台 ¨ 结构 见 3 ] 图 1 该 运动 模 拟 台可 以模 拟 的船 舶 6 自由度 运 ,
Y 艏摇 Y twat 构 由 6根 驱 动杆 和上 下 两 、 。Se r 机 个 平 台组成 并 联 机 构 。与 串联 机 构 相 比 , 种结 这
轴 平行 的局 部 坐标 系 , 点 P 为 上平 台铰 点 外接 原 圆的 圆心 ; 为将 局 部 坐标 系 的 向量 转 移 至 固定 坐
坐标 系而 言 的 , 得相应 的旋 转 矩 阵 : 故
动 的最大 幅值 分别 为横 摇 +4 。纵 摇 ±4。 0、 O。
收 稿 日期 :0 00 — 1 2 1~51
修 回 日期 :0 00 —0 2 1~61
Rvz a, y 一 Rz a R R ) ,( , ) ( ) ( ) ( 一
度高 , 方便取得各种工况下 的试验数 据。 关键 词 : 升沉补偿 ; tw r 平 台; Se at 数字液压 ; 广义 预测 ; 相似度 中图分类号 : 6 . ; U6 12 THI 7 3 文献标志码 : A 文章编号 :6 17 5 (0 10 —0 10 1 7—9 3 2 1 ) 30 9 —4
深水吊装升沉补偿液压系统建模与优化
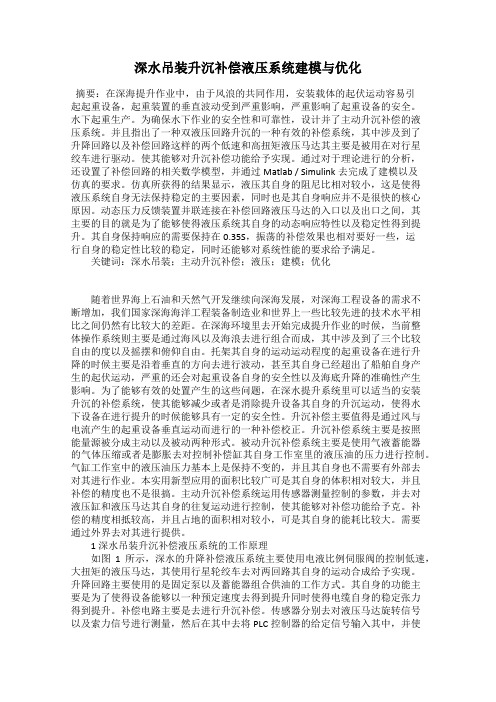
深水吊装升沉补偿液压系统建模与优化摘要:在深海提升作业中,由于风浪的共同作用,安装载体的起伏运动容易引起起重设备,起重装置的垂直波动受到严重影响,严重影响了起重设备的安全。
水下起重生产。
为确保水下作业的安全性和可靠性,设计并了主动升沉补偿的液压系统。
并且指出了一种双液压回路升沉的一种有效的补偿系统,其中涉及到了升降回路以及补偿回路这样的两个低速和高扭矩液压马达其主要是被用在对行星绞车进行驱动。
使其能够对升沉补偿功能给予实现。
通过对于理论进行的分析,还设置了补偿回路的相关数学模型,并通过Matlab / Simulink去完成了建模以及仿真的要求。
仿真所获得的结果显示,液压其自身的阻尼比相对较小,这是使得液压系统自身无法保持稳定的主要因素,同时也是其自身响应并不是很快的核心原因。
动态压力反馈装置并联连接在补偿回路液压马达的入口以及出口之间,其主要的目的就是为了能够使得液压系统其自身的动态响应特性以及稳定性得到提升。
其自身保持响应的需要保持在0.35S,振荡的补偿效果也相对要好一些,运行自身的稳定性比较的稳定,同时还能够对系统性能的要求给予满足。
关键词:深水吊装;主动升沉补偿;液压;建模;优化随着世界海上石油和天然气开发继续向深海发展,对深海工程设备的需求不断增加,我们国家深海海洋工程装备制造业和世界上一些比较先进的技术水平相比之间仍然有比较大的差距。
在深海环境里去开始完成提升作业的时候,当前整体操作系统则主要是通过海风以及海浪去进行组合而成,其中涉及到了三个比较自由的度以及摇摆和俯仰自由。
托架其自身的运动运动程度的起重设备在进行升降的时候主要是沿着垂直的方向去进行波动,甚至其自身已经超出了船舶自身产生的起伏运动,严重的还会对起重设备自身的安全性以及海底升降的准确性产生影响。
为了能够有效的处置产生的这些问题,在深水提升系统里可以适当的安装升沉的补偿系统,使其能够减少或者是消除提升设备其自身的升沉运动,使得水下设备在进行提升的时候能够具有一定的安全性。
深海采矿被动升沉补偿系统参数设计与仿真研究的开题报告
深海采矿被动升沉补偿系统参数设计与仿真研究的开题报告一、研究背景随着深海采矿技术的不断发展,深海矿产资源的开采已经成为国际上热门的研究领域。
由于深海环境的特殊性,深海采矿设备必须具备很高的稳定性和安全性。
而深海采矿被动升沉补偿系统作为深海采矿设备中的关键技术之一,能够有效提高采矿设备的稳定性和安全性,在深海采矿的实际应用中具有重要的意义。
二、研究目的本研究旨在设计一种深海采矿被动升沉补偿系统的参数,并进行仿真研究,从而探究该系统在深海采矿中的应用效果。
三、研究内容1. 分析深海采矿被动升沉补偿系统的基本原理,研究其关键技术和性能指标;2. 设计深海采矿被动升沉补偿系统的参数,包括质量和刚度等;3. 利用仿真软件对设计的被动升沉补偿系统进行建模和仿真分析,探究其在深海采矿中的应用效果;4. 评价被动升沉补偿系统的性能指标,并提出改进意见和建议。
四、研究意义本研究通过深入分析和探究深海采矿被动升沉补偿系统的参数设计和仿真研究,有助于进一步完善深海采矿设备的安全性和稳定性,提高深海矿产资源的开采效率和质量,具有重要的理论和实际意义。
五、研究方法本研究采用文献调研、理论分析和仿真研究相结合的方法。
具体包括:查阅有关深海采矿被动升沉补偿系统的文献资料,分析系统的基本原理和性能指标;设计被动升沉补偿系统的参数,分析系统结构和特点,确定系统的质量和刚度等参数;利用仿真软件对被动升沉补偿系统进行建模和仿真分析,并评价其性能指标。
六、预期成果1. 深入掌握深海采矿被动升沉补偿系统的基本原理和性能指标;2. 设计一种深海采矿被动升沉补偿系统的参数,并进行仿真研究;3. 评价仿真结果,提出改进意见和建议。
七、进度安排本研究预计时限为6个月,研究进度安排如下:第1-2个月:文献调研和基本原理分析;第3-4个月:参数设计和建模仿真;第5个月:仿真结果评价和分析;第6个月:撰写论文和完善工作。
八、参考文献1. 吴志华. 深海采矿被动升沉补偿系统的仿真研究[J]. 机械制造与自动化, 2018(1):34-38.2. 严志伟, 魏勒. 深海采矿被动升降系统的研究[J]. 科技视界, 2019(3):22-25.3. 王瑞, 黄明. 深海采矿被动升降系统的性能优化[J]. 深海工程, 2020(4):11-14.。
主动式升沉补偿系统

二、主动式升沉补偿系统
图7 为主动式升沉补偿系统原理,该系统是一套闭环反馈系统,依靠补偿系统本身动力机的能源来工作(例如,液压泵) ,大钩作上下运动时,位移传感器输出的补偿缸活塞位移信号与给定的控制规律进行比较后获得的偏差信号传递给控制器。
图7中的变量泵是双向变量泵,当船下沉时,控制器输出的控制信号为正,变量泵向补偿缸的下油腔输送液体,使活塞向上运动;当船上升时,控制器输出的控制信号为负,变量泵从补偿缸下油腔排出液体,从而使补偿缸活塞向下运动来补偿大钩位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第10卷第3期2012年9月中国工程机械学报CHINESE JOURNAL OF CONSTRUCTION MACHINERY Vol.10No.3Sep.2012作者简介:徐宝富(1939-),男,教授,博士生导师.E-mail :xubaofu@sina.com 基盘升沉补偿系统的设计和分析徐宝富1,羊衍贵3,谌志新1,2,王云杰3(1.农业部渔业装备与工程重点开放实验室,上海200092;2.中国水产科学研究院渔业机械仪器研究所,上海200092;3.同济大学机械与能源工程学院,上海201804)摘要:针对深水勘察船的基盘升沉补偿系统进行研究.重点阐述无需专用能源,而利用海浪波动来储能和释放能量的被动补偿方法.介绍适用于深海的3种基盘被动升沉补偿系统的结构、工作原理和相关数学模型,并阐述补偿液压缸、补偿液压马达、蓄能器、重锤等主参数的选择方法.最后通过海深为3000m 的算例来说明3种被动补偿方法的特点,为相关设计人员选用基盘被动升沉补偿机构和实际设计计算提供参考.关键词:被动补偿;补偿液压缸;补偿液压马达;蓄能器;重锤中图分类号:TE 953文献标识码:A文章编号:1672-5581(2012)03-0306-05Design and analysis on template heaving compensation systemsXU Bao-fu 1,YANG Yan-gui 3,CHEN Zhi-xin 1,2,WANG Yun-jie 3(1.Key Laboratory of Fishery Equipment and Engineering ,Ministry of Agriculture ,Shanghai 200092,China ;2.Fishery Machinery and Instrument Research Institute ,Chinese Academy of Fishery Sciences ,Shanghai 20092,China ;3.School of Mechanical Engineering ,Tongji University ,Shanghai 201804,China )Abstract :With regard to template heaving compensation system for deep-sea exploration ships ,the compensation method is first proposed without specialized energy but wave energy.In details ,the structures ,working principles and mathematical models for three types of passive template heaving compensation system are introduced.The selection methods for such key parameters as compensation hydraulic cylinder ,motor ,accumulator and hammer are then postulated.Finally ,by applying a computational example in terms of 3000m deep-sea ,the features of three types of passive compensation methods are speculated.Therefore ,this approach sets a reference to practical compensation mechanism design and computation.Key words :passive heaving compensation ;compensation hydraulic cylinder ;compensation hydraulic motor ;accumulator ;hammer近年来,全球油气重大发现50%以上来自于海上,特别是深水领域,海洋油气的勘探的新趋势是由水深200 300m 的大陆架区域向3000m 的深水区域发展[1].安装在工作船上的勘探设备在工作中受到海浪升降的影响,通常应有升降补偿装置.补偿装置就是消除海浪波动影响,使勘探设备犹如在陆地工作一样安全可靠.本文以勘察船上的基盘为例,介绍基盘升沉补偿装置的选型和设计问题.1基本概况如图1所示[2],安装在勘察船上的基盘和取样设备主要由基盘绞车、取样绞车、基盘和取样器组成.基盘绞车由液压马达驱动,可将基盘下放到海床上.基盘是钻杆在海底定位的装置,钻探结束后,钻杆被基盘上的海底钳夹紧,取样器由取样绞车下放,通过空心的钻杆并靠其自身的重力砸击钻探面来进行取样.取第3期徐宝富,等:基盘升沉补偿系统的设计和分析样成功后,取样器被取样绞车提升到勘察船,基盘绞车将基盘提升至勘察船,完成整个工作循环.钻探过程较长,有时可达几周时间.在工作过程中,因海浪波动引起勘察船作升降运动,因此需要基盘波浪补偿系统来确保基盘不被拉起和保证钢丝绳有一定拉紧力.勘察船因海浪上升时,钢丝绳应自动放长保证一定拉力,而工作船下降时,钢丝绳应自动收紧,保证一定拉力,保证基盘平稳地置于海底.图1勘探设备结构简图Fig.1Schematic of exploration equipment基盘波浪补偿系统的技术难点是:①由于深海作业(海深达3000m )的钢丝绳很长,绳重较大.补偿功率较大;②海浪幅度较大,其幅值可达ʃ3m ,周期达12s ,这加大了补偿功率和补偿机构.2补偿方案分析补偿方案有主动补偿和被动补偿2大类:①主动补偿是应用专用能源来进行补偿作业,如使用专用泵源,通过伺服阀、比例阀或电磁阀进行控制来完成补偿作业,一般形成闭环系统.主动补偿系统补偿精度高、响应快、性能稳定,不受工况影响.但补偿功率消耗大,尤其对大位移补偿更是如此,而且补偿功率大部转化为热量,液压系统还需附加散热器散热,以维持系统热平衡.②被动补偿是把海浪升降的能量储存起来,作补偿能源.如使用液压系统被动补偿方案,将波浪上升能量通过液压系统储存在蓄能器中,而在波浪下降过程中释放出来,用作补偿能量.被动补偿方法优点是不需专用能源,系统发热少,但补偿精度低[3].对于基盘海浪补偿装置,要求补偿精度不高,因此选用被动补偿较合适.一般被动补偿方案有如下几种:①液压缸和滑轮组被动补偿;②液压马达被动补偿;③重锤平衡被动补偿.2.1液压缸和滑轮组被动补偿2.1.1补偿原理图2液压缸和滑轮组被动补偿方案原理图Fi.2Principle schematic of passive heave compensation using hydraulic cylinder and pulley group液压缸和滑轮组被动补偿方案的原理如图2所示[2].在起升钢丝绳中间安放一个液压缸和倍率为2的滑轮组被动补偿机构(也可根据需要选用别的倍率值).补偿机构由蓄能器2、补偿缸3、定滑轮5和动滑轮6组成.基盘绞车1正常升降时,补偿机构不工作,当基盘3下降到海床时,基盘绞车1制动,补偿机构开始工作.在勘察船上升时,钢丝绳被拉伸,补偿缸活塞杆被压缩缩回,将液压缸大腔的液压油压进蓄能器储油,整个升程是蓄能器储能的过程.勘察船下降时,钢丝绳有放松趋向,此时,蓄能器向液压缸输出液压油,使活塞杆伸出,通过滑轮组,予以补偿钢丝绳放松的长度,并保持钢丝绳一定的拉力,蓄能器以波浪的周期循环过程进行储油和释油,完成被动补偿作业[3].2.1.2模型的建立勘察船上升工况F y =p x A D /ηg =m ηh F b -F f +F g -F ()i (1)式中:F y 为油缸输出的力;p x 为蓄能器的工作压力;A D 为补偿缸大腔面积;ηg 为补偿缸的机械效率;m 为钢丝绳滑轮组的倍率;ηh 为滑轮组的效率;F b 为要求钢丝绳保持的拉力;F f 为在海水中的钢丝绳受到的浮力,F f =π4d 2L γg ,d 为钢丝绳外径,L 为浸在海水中钢丝绳的总长度,γ为海水的密度,γ=1030kg ·m -3,g 为重力加速度,g =9.8m ·s -2;F g 为动滑轮5以下的钢丝绳的重力,F g =L g γg g ,L g 为动滑轮5到基盘之间的钢丝绳的长度,γg 为钢丝绳的单重;F i 为运动部件的惯性力,F i =m y a L ,m y 为运动部件的质量(包括缸活塞杆、动滑轮和运动的钢丝绳),a L 为运动部件的加速度,即海浪加速度.运动部件惯性力较小,计算中可703中国工程机械学报第10卷略去.勘察船下降工况F y =p x A D ηg =m ηh F b-F f +F g +F ()i (2)2.1.3补偿缸和蓄能器参数的确定F b 取最大张力值F bmax ,并取蓄能器最高工作压力p x max ,由式(1)试算补偿缸的内径D 0为D 0=4m ηh ηg F bmax -F f +F g -F ()i πp 槡xmax(3)将计算所得的D 0值,根据液压缸内径系列,取液压缸的内径为D.F b 取最大张力值F bmax ,由式(1)得补偿液压缸内径为D 时,蓄能器最大工作压力p 2为p 2=m ηh ηg F bmax -F f +F g -F ()i A D(4)F b 取最小张力值F bmin ,由式(1)得补偿液压缸内径为D 时,蓄能器最小工作压p 1为p 1=m ηh ηg F bmin -F f +F g -F ()i A D(5)补偿缸工作行程S 为S =2(A L +ΔA L )m(6)式中:A L 为海浪振幅;ΔA L 为极限情况下,海浪振幅的增加量.蓄能器储油和释放容积ΔV 为ΔV =A D S(7)蓄能器总容积V 0为[4]V 0=ΔVp1k1p ()11-1p ()21[](8)式中:p 0为蓄能器充气压力,取p 0=0.9p 1;k 为绝热指数,对氮气或空气,可取k =1.4.2.2液压马达的被动补偿2.2.1补偿原理图3液压马达被动补偿方案原理图Fig.3Principle schematic of passive heave compensation using hydraulic motor液压马达被动补偿原理如图3所示[2].将起升液压马达同时用作液压马达被动补偿系统,连接阀2处中位时蓄能器和液压马达连接油路被切断,操纵换向阀可使基盘绞车运行.若换向阀处中位,连接阀移入左位,蓄能器和液压马达油路连接,形成补偿系统.在勘察船上升时,钢丝绳拉动液压马达旋转,马达输出液压油,向蓄能器充油,蓄能器储能;当勘察船下降时,蓄能器向液压马达供油,使钢丝绳拉直,并保持一定拉紧力.2.2.2模型的建立勘察船上升工况T y =12πp x V m0i ηt =(F b -F f +F g )D i 2-J m ε(9)式中:T y 为补偿液压马达输出的扭矩;V m0为补偿液压马达总排量;i 为起升机构减速器的传动比;ηt 为补偿液压马达和起升机构减速装置的总机械效率;D i 为补偿时卷筒钢丝绳工作直径;J m 为换算到马达轴上的液压马达、减速装置卷筒和卷筒上钢丝绳的总惯量;ε为换算到马达轴上的角加速度,ε=2a L iD i;F g ,F f 可按前述液压缸被动补偿中相关公式计算.勘察船下降工况T y =12πp x V m0i /ηt =(F b -F f +F g )D i 2+J m ε(10)803第3期徐宝富,等:基盘升沉补偿系统的设计和分析2.2.3补偿液压马达和蓄能器参数的确定马达的主参数要考虑3个参数:补偿压力、马达的总排量和补偿时马达最高转速.补偿压力,即蓄能器实际补偿工作压力,因起升液压马达兼作补偿马达,蓄能器最高补偿压力应和起升液压马达实际工作压力一致,最大压力不能超过马达的额定工作压力,以保证液压马达安全可靠工作.补偿马达的总排量,若起升马达使用一个液压马达驱动,则驱动马达排量为补偿马达的总排量,适当选取蓄能器的补偿压力来平衡负载,但蓄能器最大工作压力不能超过液压马达的额定工作压力.若起升机构使用多个液压马达,可选用其中几个组合来满足补偿马达总排量要求,以减少蓄能器的总容积.蓄能器的工作总容积ΔV 为ΔV =2(A L +ΔA L )V m0iπD 1ηm V(11)式中:ηm V 为液压马达的容积效率.F b 取最大张力值F bmax ,由式(9)得蓄能器最大工作压p 2为p 2=πD iV m0i ηt (F bmax -F f +F g )-2πJ m εmax V m0i ηt(12)F b 取最小张力值F b min ,由式(9)得蓄能器最小工作压p 1为p 1=πD iV m0i ηt (F bmin -F f +F g )-2πJ m εmin V m0i ηt(13)蓄能器总容积为[4]V 0=ΔVp11p ()11k-1p ()21[]k(14)2.3重锤平衡被动补偿2.3.1补偿原理图4重锤被动补偿方案原理图Fig.4Principle schematic of passive heave compensation using hammer如图4所示[2],利用重锤4来储存能量和释放能量.在起升钢丝绳中间,安装定滑轮2和动滑轮6,形成2倍率滑轮组,与动滑轮6连接的钢丝绳绕过定滑轮5与重锤4连接.在正常升降时,使补偿机构制动,操纵基盘绞车就可完成基盘正常升降.当要进行补偿时,基盘绞车制动,在勘察船上升时,钢丝绳拉动动滑轮6,继而拉动重锤4上升,补偿装置储能,并保持钢丝绳有一定的拉紧力;勘察船下降时,重锤4向下运动拉紧钢丝绳使钢丝绳保持一定拉紧力,补偿装置释放能量,当然滑轮组倍率也可采用4,但增大重锤重力,减小补偿行程.2.3.2模型的建立勘察船上升工况G b +G b g a Lm=m F b -F f +F ()g ηh(15)式中:G b 为重锤重力.勘察船下降工况G b -G b g a Lm=m F b -F f +F ()g /ηh(16)2.3.3重锤重力的确定可先由式(17),初步确定重锤重力G b ,然后按式(15)和(16)验算拉力是否满足要求,再进一步调整重锤重力.G b =mF bmin +F bmax2-F f +F ()g(17)3实际算例以一个基盘被动补偿实例计算来说明3种被动补偿机构的特点.903中国工程机械学报第10卷3.1设计要求(1)海况参数.最大海况条件,海浪振幅A L =ʃ3m ,海浪振幅增加量ΔA L =ʃ0.4m ,周期T =12s.(2)系统要求补偿力.作业时保证基盘绞车的钢丝绳张力F =20 50kN (不包括钢丝绳重力).(3)钢丝绳参数.钢丝绳规格φ40mm (GB /T8918—2006),单重γg =6.69kg ·m -1(4)作业水深3200m.3.2计算结果表1蓄能器参数Tab.1Accumulator parameter补偿方案蓄能器参数p 1/MPa p 2/MPa p 0/MPa V 0/L ΔV /L 液压缸滑轮组19.1922.2217.27704.064.6液压马达18.5221.5516.70774.872.0(1)液压缸滑轮组被动补偿:取m =4,ηh =0.98,ηg =0.98,计算得D 0=211.7mm.取D =220mm ,S =1.7m ,计算得所需蓄能器的参数如表1.(2)液压马达被动补偿:取V m0=4L ·r-1,i =6,ηt =0.921,D i =0.72m ,J m =279kg ·m 2,计算得所需蓄能器参数如表1.(3)重锤平衡被动补偿:取m =2,ηh =0.99,计算得G b =410kN ,补偿重锤位移S =3.4m ;F b =24.445.8kN.4结论从上述实际算例的结果,可得出以下结论:(1)在满足拉力范围要求前提下,重锤补偿方案最简单,无需蓄能器及相关液压元件,价格较低、可靠性好、维护方便,但重锤重力和体积较庞大,需较大的安装空间,补偿精度较好.因重锤行程有限,补偿时重锤中位应和波浪的中位对中,否则会使补偿限位而使补偿失效,所以应有对中控制措施.(2)液压缸滑轮组被动补偿方案与液压马达被动补偿方案相比,前者可根据需要选择滑轮组倍率,以选择相应的补偿缸行程和补偿液压缸内径,补偿蓄能器容积略小,但液压缸和滑轮组安装和布置较麻烦,维修也不方便;液压缸滑轮组被动补偿方案与重锤平衡被动方案相比较,前者需蓄能器和液压元件,价格昂贵,维修麻烦,但补偿精度较重锤要差.若要提高精度需加大蓄能器总容积,因补偿缸行程有限,补偿缸中位应和波浪中位对中,否则会使补偿限位而补偿失效,所以应有对中控制措施.(3)液压马达被动补偿方案与液压缸滑轮组被动补偿方案比较,前者利用起升液压马达作补偿元件,机构和布置简单,因要通过马达、减速装置和卷筒传动进行补偿,其惯性矩较大,致使蓄能器容积增大,增大费用.这是补偿马达最大的不足.因卷筒钢丝绳可多留出足够余量,波浪对中要求不高,在补偿过程中,蓄能器会自动调节适应补偿要求,补偿精度较重锤略差,若要提高精度,需加大蓄能器总容积.因此,在被动补偿方案选择时,要根据补偿要求和补偿工况要求进行综合评价来选择合适补偿方案.参考文献:[1]钟广见,曾繁彩,冯常茂.深水油气勘探现状和发展趋势[J ].南海地质研究,2009(00):69-77.ZHONG Guangjian ,ZENG Fancai ,FENG Changmao.Status and development trends of deep-water oil and gas exploration [J ].Geological Research of South China Sea ,2009(00):69-77.[2]李万莉.工程机械液压系统设计[M ].上海:同济大学出版社,2011.LI Wanli.Design of hydraulic system of construction machinery [M ].Shanghai :Tongji University Press ,2011.[3]肖体兵.深海采矿装置智能升沉补偿系统的研究[D ].广州:广东工业大学,2004.XIAO Tibing.Research on intelligent heave compensation system for deep-sea mining device [D ].Guangzhou :Guangdong University of Technology ,2004.[4]张迎春,宁艳平,陆元三.大容量活塞式蓄能器的使用[J ].液压与气动,2011(1):86-88.ZHANG Yingchun ,NING Yanping ,LU Yuansan.Application of 1arge capacity piston accumulator [J ].Chinese Hydraulics &Pneumatics ,2011(1):86-88.013。