利用adams建立简单的滚珠丝杠机构
基于ADAMS软件的四杆机构角速度曲线拟合

环命令用法三部分,它们建立在 ADAMS 命令语言 基础上,是 ADAMS/View 工程应用中进行二次开 发的有效工具。本文即把后处理模块的仿真结果分 析曲线存储为一维的数据矩阵,再以这些数据矩阵 为依据,用由 ADAMS 条件循环语句编写的遗传算 法优化程序进行曲线拟合的优化设计。
[3] Chen J S , Control of Electric Power Steering Systems. SAE Transactions[R],1998,1116:1702-1704.
[4] Seoul. S. G., Control logic for an electric power steering system using assist motor [J ]. Mechatronics, 2002,(12):447-459.
[5] 余志生. 汽车理论(第3版)[M]. 北京:机械工业出版社,2000.
(上接第45页)
变异就是以特定概率(一般在 0.001 到 0.01 之间 取值)使个体发生“突变”,以免程序陷于局部最优。 在实值编码中个体取值是连续的实数,本例将个体 中某一基因在允许值范围内随机取值。
4 实例分析
优化目标:设计适用于门窗开关装置的曲柄摇 杆机构,曲柄恒速主动(360°/s),从动摇杆的角速 度曲线形状要求如图 3 中 TARGET CURVE 所示, 最大杆长比小于 8。
1 ADAMS 中参数化模型的建立
ADAMS/View 提供了 4 种模型参数化方法(:1) 使用参数表达式;(2)参数化点坐标;(3)运动参 数化;(4)使用设计变量。利用这几种方法可以方 便地建立参数化机械系统模型。在优化程序中只需 将模型的一个或多个参数重新赋值,就可以自动地 更新整个机械系统模型。
利用adams建立简单的滚珠丝杠机构

2.4 滚珠丝杠的ADAMS建模本小节将具体介绍建模的过程。
首先是进入ADAMS时的选择,在gravity中选择重力模式,因为本文的机构是在有重力下工作的,所以选择普通的重力模式。
在units中选择如图的单位标准。
建立螺母和丝杠杆:然后进入ADAMS,在左侧的图标中选择第一排的第二个按键中的圆柱来作为滚动丝杠的杆。
设置长度为700mm。
由于本文分析的是滚珠丝杠整体的动力学,所以将螺母也用圆柱表示。
将螺母的长度设为60mm,并与丝杠杆共轴然后选择如图第六行第三个按键使得螺母的半径减去丝杠杆的半径成为一个刚好套住丝杠杆的空心圆柱。
然后在约束副中选择第四行的螺纹副,施加对象为丝杠杆和螺母并在选中螺纹副鼠标右键modify选项中的pitch中设置螺距为10mm。
建立转动副:在约束副选项中选择第一个旋转副,由于杆件的转动是相对地面的,并且主动件是丝杠杆所以施加对象设置为ground和丝杠杆。
在设置完转动副后,由于本文研究的主要对象是滚珠丝杠,所以只需要画出滚珠丝杠杆。
但缺少了动力源,所以我们在转动副上加一个转动的驱动。
驱动的添加是在图标中添加。
值得注意的是转动副的初始设定是绕z轴转动,但我们要使得丝杠杆转动需要设定转动是绕x轴转动就需要对转动副的方向做一个调整。
具体过程为鼠标右键选择转动副点击modify按键在图标中点击图标中的y方格就可以使得转动副的方向转动为绕x轴的转动。
建立圆柱副:由于单独的在螺母和丝杠杆间建立螺纹副,只能使得螺母在丝杠杆的带动下转动而不能变成直线运动。
所以要在螺母和丝杠杆之间加一个圆柱副保证他们能有水平方向的相对移动。
在约束副选项中选择第三行的第一个圆柱副,施加对象就定为螺母和丝杠杆。
在选择对象前先在圆柱副的下拉选项中选择如下的设置,这是因为本文作者在实践中做的一个优化的选择,因为如果不选择normal to grid这个选项会出现让你在选择完两个对象后选择运动的方向,而如果你的方向选择错误则不能仿真。
(完整版)Adams运动仿真例子--起重机的建模和仿真
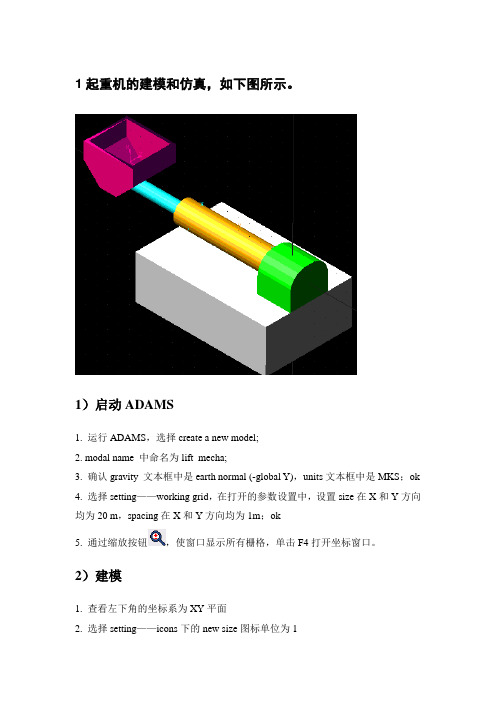
1起重机的建模和仿真,如下图所示。
1)启动ADAMS1. 运行ADAMS,选择create a new model;2. modal name 中命名为lift_mecha;3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4. 设置实体参数;On groundLength :12Height:4Depth:85. 鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—working grid ,设置spacing中X和Y均为0.510. 选择圆柱实体绘图按钮,设置参数:New partLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图11. 继续圆柱工具,绘制悬臂①设置参数:New partLength: 13mRadius: 0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角12. 选择box按钮图标,创建铲斗①设置参数:New partLength : 4.5Height: 3.0Depth: 4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position按钮下一级按钮move按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系 Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数2 bod ——1 loc和pick feature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2 bod——1 loc和pick feature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information 信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数END Time:1;Steps:100,进行仿真5)测量和后处理①鼠标右键点击铲斗,打开右键快捷键,选择测量measure②系统打开参数设置对话框,将Characteristic设置为CM Point,Component 设置为Y,测量Y向位移。
四连杆机构的Adams仿真

铰链四杆机构的仿真假设一个曲柄摇杆机构,其各个杆件尺寸为AB =280×40×20mm ,BC =520×40×20mm,CD =500×40×20mm,AD =720×40×20mm 。
已知主动曲柄角速度ω=30(°)/s , 试建立该机构的虚拟样机模型并分析摇杆的运动。
通过曲柄存在的条件可以判断出该机构为曲柄摇杆机构。
建模及仿真步骤如下:(1) 将储存位置设置为C:\Users\Administrator\Desktop\adma\1。
(2) 双击桌面图标Adams/View MD R3 或者通过开始→所有程序中找到Adams/View 进入ADAMS 欢迎界面,在Model name 中输入:crank_rocker,如图1所示,单击“OK”按钮进入ADAMS 主界面。
图1 欢迎界面(3) 按照给定的各个杆件长度建立机构模型,通常使用如下方法。
利用某时刻各杆形成的特殊形状关系来确定其位置,下面我们去曲柄和机架共线之一的位置,如图2所示。
图2 曲柄与计价的共线位置此时,可利用余弦定理来求解三角形BCD 的位置。
BD 的边长为: BD =AD −AB =720−280=440mm 根据余弦定理可求得:cos a =BD 2+CD 2−BC 22BD ·CD=0.3936,得a =66.82° 获得特殊位置角后,按下述步骤进行建模:●单击主工具栏图标,在参数设置中输入题目给定的机架尺寸,创建机架,如图3所示。
图3 机架建模●选中机架单击右键,按图4所示的步骤将其命名为frame。
图4 重命名机架●按照同样的方法在机架右端创建给定尺寸的摇杆,如图所示,将其命名为rocker。
右击摇杆选择Part:rocker,如图5所示。
图5 摇杆建模●将摇杆按图所求的角度旋转,选择旋转移动工具按钮,在选择旋转中心,在祝工作区选择摇杆旋转所围绕的中心点,输入所需转动的角度66.82°选择顺时针旋转按钮,如图6所示。
ADAMS教程-连杆机构

题5-6图为开槽机上用的急回机构。
原动件BC 匀速转动,已知mm a 80=,mm b 200=,mm l AD 100=,mm l DF 400=。
原动件为构件BC ,为匀速转动,角速度2/rad s ωπ=。
对该机构进行运动分析和动力分析。
在本例子中,将展示在ADAMS 中可以先用未组装的形式构造急回机构的各个部件,然后在仿真前让这些部件自动地组装起来,最后进行仿真。
这种方法比较适合构造由较多部件组成的复杂模型。
创建过程⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a newmodel ”,在模型名称(Model name )栏中输入:jihuijigou ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框题5-6图⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网 格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺 寸(Size )中的X 和Y 分别设置成750mm 和1000mm ,间距(Spacing ) 中的X 和Y 都设置成10mm 。
然后点击“OK ”确定。
如图2-1所表示2.2用鼠标左键点击动态放大(Dynamic Zoom )图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
2.3 用鼠标左键点击动态移动(Dynamic Translate )图标,在模型窗口中,按住鼠标左键,移动鼠标选择合适的网格。
⒊创建机构的各个部件3.1 在ADAMS/View 零件库中选择连杆(Link )图标,长度为200mm(mm b200=)3-1所示。
ADAMS 绳索建立

开始之前,简单说一下上一次写了这个例子,论坛里大家提意见说要加接触的东西,这次加上另外一点,关于绳子参数的设置,这个东西每个人做的东西不一样,我怎么说呢,设置的根据肯定是你要模拟物体的性质了,这个东西还是自己查查资料吧。
第一步,打开ADAMS建立一个新模型,model name为shengzi。
如下图注意:model name要与以后要用到的cmd命令文件的名称一致第二步,创建一个圆柱,长50,半径10,圆柱方向如下图所示,右键 rename,将名字改为.shegnzi.PART_1第三步,将圆柱copy 300次,方法是点击tools>read cmmand file F2,选择相应的命令文件(关于命令文件的建立看文章最后的注意事项)。
这里,我的命令文件如下!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!defaults model model_name=.shengzivariable create variable_name=ip integer_value=1while condition=(ip<300)!set partpart copy part=.shengzi.part_1 new_part=(unique_name("part"))!set partvariable modify variable_name=ip integer_value=(eval(ip+1))end!whilevariable delete variable_name=ip !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!第4步,移动复制的圆柱,依然是倒入相应的命令文件命令文件如下(c1,c2,c3代表的是移动的方向,这里我是向y方向移动的,所以y=50,50为一节圆柱的长度)!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!defaults model part_name = .shengzi.part_1variable create variable_name=ip integer_value=1while condition=(ip<300)move object part_name = (eval(".shengzi.part_"//(ip+1))) &c1=0 c2=50 c3=0 &cspart_name = (eval(".shengzi.part_"//(ip)))variable modify variable_name=ip integer_value=(eval(ip+1))end!whilevariable delete variable_name=ip !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!移动完成后的图形如下第5步,调整working grid方向为global yz如下图第6步,建立一个半径为83.30127019的圆柱,长度随意,但是不能太短,位置如图说明一下半径的由来:我计划圆柱这条绳子绕一个圆柱(下文中称为转轮),绳子两端都朝下,这就需要绳子旋转一定角度,但是绳子是半径为10长50的圆柱组成,所以我希望,绕滑轮的每个圆柱都与滑轮相切。
第二讲 基于ADAMS软件的机械系统模型建立

本讲小结:
本次课主要介绍基于ADAMS仿真软件的机械系统样 机的模型建立,先从单个零部件的模型建立介绍到系统 的样机建立以及位置的调整和参数的修改;并详细介绍 了ADAMS软件在建立模型时与其它三维CAD 软件的转 换。
用ADAMS软件建立模型时,一定注意辅助线要及时 删除;删除零件时要彻底。
第二讲 基于ADAMS软件仿真 虚拟样机的模型建立
一、利用Adams软件建模工具
直接建立样机模型
二、利用其它软件建立模型
后输入Adams软件
三、实例分析
建模的预备知识: 1)几何体类型:实体、柔性体、点质 量、大地 2)几何体坐标 3)几何体的自由度 4)几何体的命名 5)鼠标的应用
建模前的建模前必须准备的工作:
按照屏幕下方状态栏 的提示,用鼠标选取 线1。
圆弧为 线1
折线为 线1
4、添加几何体细节结构
建模工具
挖孔
倒直 角
倒圆 角
凸台
壳体
倒圆角操作过程
选择图标
下 方 状 态 栏 设 置
倒角 半径
若选中, 倒角半径 是变化的
凸台操作过程
选择图标
凸台 半径
下 凸台 方 高度 状 态 栏 设 置 然后根据提示,左键先选择实体,再选择 凸台所在面,点击右键即可完成。
壳体操作过程
选择图标
壳体 厚度
下 方 状 态 向内或 栏 向外 设 置 然后根据提示,左键先选择实体,再选择 壳体开口所在面,点击右键即可完成。
5、修改几何形体
(1) 拖动热点
修改几何形体有 3种方法:拖动 热点、利用对话 框和编辑位置表。 热 点
(2) 利用对话框
几何体 名称
标 志 点 宽 度
基于ADAMS的滚珠丝杠式ISD悬架平顺性仿真研究_孙晓强

表 2 1 /4 ISD 模型参数表
参数 簧载质量 mb / kg 轮胎刚度 kt / ( kN·m - 1 ) 惯容系数 b / kg 第一级悬架刚度 k1 / ( kN·m - 1 ) 第二级悬架刚度 k2 / ( kN·m - 1 ) 第一级悬架阻尼系数 c1 / ( kN·s·m - 1 ) 第二级悬架阻尼系数 c2 / ( kN·s·m - 1 )
摘 要: 为解决 I 型 ISD 悬架存在的惯容器 “击穿” 现象,提出 II 型 ISD 悬架,以提高 ISD 悬架实用性能. 基于 Pro / E 和 ADAMS 联合建模,通过 ADAMS 和 MATLAB 联合仿真,对滚珠丝杠式 ISD 悬架平顺性进行仿真分析. 对正弦输入、随机路面输入和阶跃输入作用下的 ISD 悬架动态性能进行初步研究. 结果表明: 与传统被动悬架 相比,提出的 II 型 ISD 悬架可以有效降低车身垂直振动加速度.
图 4 正弦输入下车身加速度响应
3. 2 随机路面输入 作为车辆振动输入的路面不平度,主要采用路
面功率谱密度描述其统计特性. 路面功率谱密度
Gq( n) 一般用下式作为拟合表达式[10]
Gq ( n) = Gq ( n0) [n / n0]- w ,
( 6)
式中: n 为空间频率 ( m -1 ) ,它是波长 λ 的倒数,
Abstract: In order to solve the “broken-down”problem in an inerter of the existing Inerter-SpringDamper ( ISD) suspension,the second generation of the ISD suspension was proposed for improving its performance. A ball-crew ISD suspension model was built in Pro / E and ADAMS,and its working process was simulated in ADAMS and MATLAB. The dynamic performance of the suspension was analyzed separately under the conditions of sinusoidal input,random input and step input. The results showed that the new-type suspension could significantly reduce the vertical vibration acceleration of the vehicle body, comparing with traditional passive suspensions.