基于CAN总线的汽车仪表系统
CAN总线汽车仪表系统的抗干扰分析与设计

机的 MD转换输入端, 利用其内部 MD转换器完成测量。测
量结果 经过 单片机送 入步进电机驱动模块驱动步进 电机 . 分
别显示车速 、 速、 转 水温和机油压力 。通过单片机计算汽车的
行 驶 里程 并送 入液 晶显示 模块 显 示 .将 里程 数 值存 储 于
图 1 1 系统硬件总体结构 —
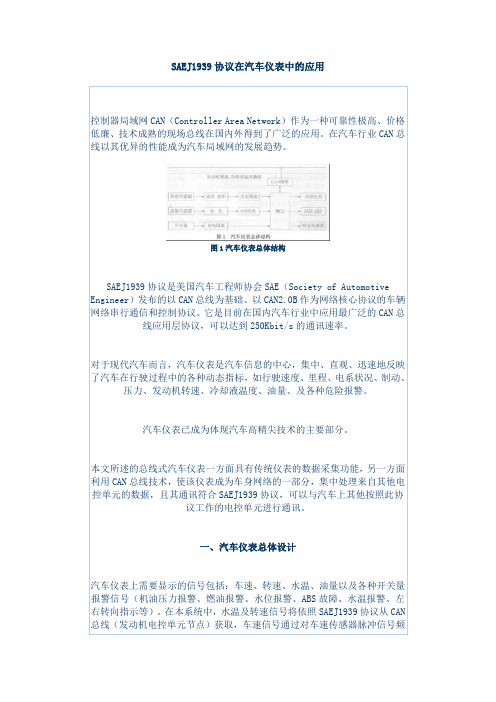
E PO E R M。通过 C N接 口将采集到 的数据发送到 C N总线 A A 上. 并且接收其他 C N节点的信 号。系统硬件总体结构如 图 A 11 - 所示 , 系统软件总体结构如 图 12所示 : —
1 C AN总线 汽车仪 表 系统
C N总线汽车仪表系统采集来 自汽车传感器的车速 、 A 转
S in e& Te h oo y Vi o ce c c n lg s n i
21 年 8 01 月第 2 期 3
科 技 视 Wi t
项目 与课题
C N总线汽车仪表系统的抗干扰分析与设计 A
邱英 杰 ( 杭州 职业 技术 学 院
【 摘
浙江
杭州
30 1 ) 1 0 8
要 】 干扰设计始终是电子应 用设计的重要环节。基 于汽车 工作环境的复杂, C N总线汽车仪表 系统的抗干扰进 抗 对 A
e v r n n , u o b l r fCAN b s c r i s u n y tm s a ay e n h n i i tre e c e in I h e in u l n io me t a tmo i wo k o e u a n t me t s se i n lz d a d t e a t n e r n e d sg . n t e d sg ,f l r - f y
汽车舒适系统can总线技术的应用

汽车舒适系统CAN总线技术的应用摘要:随着现代汽车技术的不断发展,汽车正在向高舒适、高操纵性、高安全性、高智能方向发展。
尤其高档轿车,高精度传感器及汽车电器在整车大量应用,增加了大量复杂的线束,大量线束给整车的安全性能带来巨大隐患。
汽车can总线技术是汽车电子控制管理系统中不可或缺的重要组成部分,它就相当于一个公共的信号通道,被用来传输各种汽车的传感信号。
can总线技术的应用,简化了汽车的电气线路提高了其电控系统的可靠性与灵活性,还有它在减少系统线缆,简化系统安装、维护和管理,降低系统的投资和运行成本,增强系统性能等方面的优越性,引起人们的广泛注意,得到大范围的推广,导致了自动控制领域的一场革命。
本文将对汽车舒适系统can总线技术的特点、结构及应用等进行简要的论述。
[1]关键词:汽车;can总线;舒适系统Application of CAN Bus Technology in Automotive Comfort SystemAbstrct: With the continuous development of modern automobile technology, automobiles are developing in the direction of high comfort, high maneuverability, high safety and high intelligence. Especially high-grade cars, high-precision sensors and automotive electrical appliances are widely used in the whole vehicle, adding a large number of complex wiring harnesses, a large number of wiring harnesses bring great hidden dangers to the safety performance of the vehicle. Automotive can bus technology is an indispensable and important part of automotive electronic control and management system. It is equivalent to a common signal channel and is used to transmit various automotive sensing signals. The application of CAN bus technology simplifies the electric circuit of automobile and improves the reliability and flexibility of its electronic control system. It also has the advantages of reducing system cables, simplifying system installation, maintenance and management, reducing system investment and operation cost, enhancing system performance, etc. It attracts wide attention and has been widely promoted, leading to the field of automatic control. A revolution. In this paper, the characteristics, structure and application of CAN Bus Technology in automobile comfort system are briefly discussed.Key words: automobile; can bus; comfort system目录1、引言 (1)2、 CAN总线的产生与发展 (1)2.1汽车CAN总线简介 (1)2.2汽车CAN总线的由来 (1)2.3汽车CAN总线的应用分类 (2)2.3.1驱动系统子网 (2)2.3.2信息/娱乐子网 (2)2.3.3安全/舒适子网 (2)2.3.4故障诊断子网 (3)3、汽车数据传输总线简介 (3)4、总线传输的优点 (3)5、车载网络结构 (4)6、舒适CAN总线系统原理 (5)6.1舒适CAN总线与动力CAN总线的区别 (5)6.2舒适CAN总线系统的识读 (5)6.2.1电源负荷管理 (5)6.2.2车内灯控制 (5)6.2.4车窗清洗和雨刮器控制 (6)6.2.5外后视镜和后窗加热 (6)7、总结 (7)参考文献 (8)致谢 (9)1、引言目前国内车市越来越类似于手机市场,车系繁多且性能多样,而具备相同性能的汽车在过去的价格要贵得多。
CAN总线简介(2024版)

驱动系统的高速CAN
• 驱动系统CAN主要连接对象是发动机控制器 (ECU)、ABS控制器、安全气囊控制器、 组合仪表等等,它们的基本特征相同,都是 控制与汽车行驶直接相关的系统。
倍。这种传统布线方法不能适应汽车的发展。CAN总线可有效减少线束,节省空间。
例如某车门-后视镜、摇窗机、门锁控制等的传统布线需要20-30 根,应用总线 CAN 则
只需要 2 根。(3)关联控制在一定事故下,需要对各ECU进行关联控制,而这是传统
汽车控制方法难以完成的表1 汽车部分电控单元数据发送、接受情况
• (5)直接通信距离最远可达10km(速率5Kbps以下)。
• (6)通信速率最高可达1MB/s(此时距离最长40m)。
• (7)节点数实际可达110个。
• (8)采用短帧结构,每一帧的有效字节数为8个。
• (9)每帧信息都有CRC校验及其他检错措施,数据出错 率极低。
• (10)通信介质可采用双绞线,同轴电缆和光导纤维,一 般采用廉价的双绞线即可,无特殊要求。
可靠性高:传输故障(不论是由内部还是外部引起 的)应能准确识别出来 使用方便:如果某一控制单元出现故障,其余系统 应尽可能保持原有功能,以便进行信息交换 数据密度大:所有控制单元在任一瞬时的信息状态 均相同,这样就使得两控制单元之间不会有数据偏 差。如果系统的某一处有故障,那么总线上所有连 接的元件都会得到通知。 数据传输快:连成网络的各元件之间的数据交换速 率必须很快,这样才能满足实时要求。
• (2)网络上的节点(信息)可分成不同的优先级,可以满 足不同的实时要求。
基于CAN总线的汽车数字仪表设计

基于CAN总线的汽车数字仪表设计
冯正斌;胡琦;李军伟
【期刊名称】《农业装备与车辆工程》
【年(卷),期】2010(000)011
【摘要】设计了一款基于CAN总线的汽车仪表.仪表系统控制器选用了NEC公司的μPD78F0822单片机,CAN通信应用层完全遵循SAE J1939协议,给出了系统软硬件设计方案,并利用CANoe模拟车况发送节点进行了系统测试.试验结果表明,该系统设计方案具有较高的可靠性,基本上能够满足现代汽车对仪表系统指示精度及稳定性的要求.
【总页数】4页(P28-30,34)
【作者】冯正斌;胡琦;李军伟
【作者单位】山东理工大学交通与车辆工程学院,山东,淄博,255049;山东世星电子有限公司,山东,淄博,255049;山东理工大学交通与车辆工程学院,山东,淄博,255049【正文语种】中文
【中图分类】U463.7
【相关文献】
1.基于车载网络的汽车数字仪表系统设计 [J], 胥军;孙久强;丁一;杨保安
2.基于Luminary LM3S8962的汽车数字仪表系统设计 [J], 闫哲铭;王建;王启慧;赵云波
3.基于CAN总线的汽车数字仪表的研究 [J], 付轶璇;王建
4.基于CAN/LIN双总线电动汽车数字仪表系统的设计 [J], 江学焕;张金亮;樊红莉;
高云;王志虎
5.基于CAN总线的电动汽车数字仪表开发 [J], 刘涛;李连强;滑文山;孙辉安
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CAN总线的嵌入式汽车仪表设计

Har d wa r e Te c h ni q u e
基于 C A N总线 的嵌入式汽 车仪 表设 计
王 璐. 潘 明
( 桂 林 电 子 科 技 大 学Байду номын сангаас电 子 工 程 与 自动 化 学 院 , 广 西 桂林 5 4 1 0 0 4)
摘 要 : 在 C A N 总 线技 术 基 础 上 , 设 计 了一 款 C A N 总线 嵌 入 式 汽 车仪 表 。该 仪 表 采 用 S a m s u n g 公s - J 的¥ 3 C 6 4 1 0处理 器 . 利用 N o k i a公 司开发 的 Q t Q u i c k及 Q M L语 言 制 作 美观 大方 的人 机 交互 界 面 以 实 时 显 示 车 辆 工 作 情 况 。给 出 了 系 统 软 硬 件 结 构 设 计 方 案 。检 测 结 果 表 明 , 该 设 计 方 案 满 足 了 汽 车
本 文 采 用 No k i a最 新 开 发 的 Qt Qu i c k高 级 用 户 界 面 技
术 , 为 嵌 入 式 设 备 快 速 轻 松 地 创 建 动 态 触 摸 式 界 面 和 轻
电子 技 术 的 迅 猛 发 展 , 汽 车 信 息 容 量 与 系 统 复 杂 程 度 产
汽车CAN总线详细教程

◆1992年,CIA(CAN in Automation)用户组织成立,之 后制定了第一个CAN应用层“CAL”。 ◆ 1994年开始有了国际CAN学术年会(ICC)。 ◆ 1994年美国汽车工程师协会以CAN为基础制定了 SAEJ1939标准,用于卡车和巴士控制和通信网络。 ◆ 到今天,几乎每一辆欧洲生产的轿车上都有CAN;高级客 车上有两套CAN,通过网关互联;1999年一年就有近6千万个 CAN控制器投入使用;2000年销售1亿多CAN的芯片;2001 年用在汽车上的CAN节点数目超过1亿个 。 ◆ 但是轿车上基于CAN的控制网络至今仍是各大公司自成系 统,没有一个统一标准。
(6)通信速率最高可达1MB/s(此时距离最长40m)。
(7)节点数实际可达110个。
(8)采用短帧结构,每一帧的有效字节数为8个。
(9)每帧信息都有CRC校验及其他检错措施,数据出错率极低。
(10)通信介质可采用双绞线,同轴电缆和光导纤维,一般采用 廉价的双绞线即可,无特殊要求。
(11) 节点在错误严重的情况下,具有自动关闭总线的功能,切 断它与总线的联系,以使总线上的其他操作不受影响。
带有三个中央控制单元和总线系统的车
带有三个中央控制单元的CAN驱动网络
车用网络发展原因
电子技术发展----线束增加 线控系统(X-BY-WIRE) 计算机网络的广泛应用 智能交通系统的应用
汽车发展带来的问题
(1)汽车电子技术的发展汽车上电子装置越来 越多汽车的整体布置空间缩小
(2)传统电器设备多为点到点通信导致了庞大 的线束
(3)大量的连接器导致可靠性降低。 粗大的线束与汽车中有限的可用空间之间的矛
盾越来越尖锐,电缆的体积、可靠性和重量成为越 来越突出的问题,而且也成为汽车轻量化和进一步 电子化的最大障碍,汽车的制造和安装也变得非常 困难。 (4)存在冗余的传感器。
汽车CAN总线详解

汽车CAN总线详解概述CAN(Controller Area Network)总线协议是由 BOSCH 发明的⼀种基于消息⼴播模式的串⾏通信总线,它起初⽤于实现汽车内ECU之间可靠的通信,后因其简单实⽤可靠等特点,⽽⼴泛应⽤于⼯业⾃动化、船舶、医疗等其它领域。
相⽐于其它⽹络类型,如局域⽹(LAN, Local Area Network)、⼴域⽹(WAN, Wide Area Network)和个⼈⽹(PAN, Personal Area Network)等,CAN 更加适合应⽤于现场控制领域,因此得名。
CAN总线是⼀种多主控(Multi-Master)的总线系统,它不同于USB或以太⽹等传统总线系统是在总线控制器的协调下,实现A节点到B节点⼤量数据的传输,CAN⽹络的消息是⼴播式的,亦即在同⼀时刻⽹络上所有节点侦测的数据是⼀致的,因此⽐较适合传输诸如控制、温度、转速等短消息。
CAN起初由BOSCH提出,后经ISO组织确认为国际标准,根据特性差异⼜分不同⼦标准。
CAN国际标准只涉及到 OSI(开放式通信系统参考模型)的物理层和数据链路层。
上层协议是在CAN标准基础上定义的应⽤层,市场上有不同的应⽤层标准。
发展历史1983年,BOSCH开始着⼿开发CAN总线;1986年,在SAE会议上,CAN总线正式发布;1987年,Intel和Philips推出第⼀款CAN控制器芯⽚;1991年,奔驰 500E 是世界上第⼀款基于CAN总线系统的量产车型;1991年,Bosch发布CAN 2.0标准,分 CAN 2.0A (11位标识符)和 CAN 2.0B (29位标识符);1993年,ISO发布CAN总线标准(ISO 11898),随后该标准主要有三部分:ISO 11898-1:数据链路层协议ISO 11898-2:⾼速CAN总线物理层协议ISO 11898-3:低速CAN总线物理层协议注意:ISO 11898-2和ISO 11898-3物理层协议不属于 BOSCH CAN 2.0标准。
SAEJ1939
SAEJ1939协议更大程度地发挥了CAN优异的性能。
(二)SAEJ1939报文帧格式
J1939的信息是以PDU(Protocol Data Unit协议数据单元)的形式进行传输的,PDU的封装在应用层中完成。PDU提供了组织信息的框架,这一点对于每一个要发送的CAN数据帧来说是至关重要的。
车速、发动机转速、冷却水温度、燃油油量采用步进电机(VID29-02)驱动指针指示,里程信息采用里程表专用段式LCD模块LCM1010显示,各开关和报警信号则采用LED指示灯。
二、CAN总线及SAEJ1939协议分析
(一)CAN总线及SAEJ1939协议介绍
CAN(Controller Area Network)总线是德国Bosch公司在80年代初为解决数据可靠交换而开发的一种串行数据通信总线,它强调了实时性,又具有极高的可靠性和独特的设计,在现代汽车中已经成为必备装置。为进一步减少车身线束,方便故障诊断,满足主要电控单元和系统间大量数据信息实时交换的需要,使汽车各方面性能趋于最佳状态,基于CAN总线的C类网络被应用于车内数据通讯。CAN总线有效地将发动机电控系统、驱动防滑系统、自动巡航系统等连接成为一个综合控制系统,使整车性能得以大幅提高。
对于现代汽车而言,汽车仪表是汽车信息的中心,集中、直观、迅速地反映了汽车在行驶过程中的各种动态指标,如行驶速度、里程、电系状况、制动、压力、发动机转速、冷却液温度、油量、及各种危险报警。
汽车仪表已成为体现汽车高精尖技术的主要部分。
本文所述的总线式汽车仪表一方面具有传统仪表的数据采集功能,另一方面利用CAN总线技术,使该仪表成为车身网络的一部分,集中处理来自其他电控单元的数据,且其通讯符合SAEJ1939协议,可以与汽车上其他按照此协议工作的电控单元进行通讯。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
50
第五章 系统抗干扰分析与设计
5.1 系统干扰分析与对策
抗干扰设计始终是电子应用设计的重要环节。在设计时,要充分考
虑可能出现的各种干扰及其产生的影响,采取了相应措施,尽量提高系
统的抗干扰性能。
汽车仪表的工作环境比较恶劣,汽车工作的物理环境经常的变化,
温度、湿度、路面的颠簸状况时刻都有所不同,除了这些因素对仪表的
工作产生影响外,其他的用电设备在工作时也会产生各种电磁干扰,如
点火系统电磁场干扰,喇叭、空调系统等感性负载所产生的感应脉冲电
流干扰等。这种反电动势和放电火花干扰是各电器设备干扰的主要形式
[32]
。实验证明:汽车电器工作时产生的干扰频谱很宽(一般在
0.15-1000MHz)
,强度也很大,如当点火线圈在初级电路断开或接通时,
初级线圈两端产生高于电源电压数十倍的反向电动势,而在次级线圈上
则感应产生高达上万伏的高压,并使火花塞跳火
[38]
。综合各种因素,干
扰可分为四类
[33]
:
(1)
物理环境干扰是指应用系统在工作环境发生变化时,导致系统
出现的多种问题而不能正常工作,如环境温度、湿度变化或振动等。从
本质上说物理环境干扰是汽车的工作环境本身产生的。
(2)
电磁干扰指周围空间的电磁波辐射窜入系统,而引起系统工作
不正常,电磁干扰可来自应用系统外部,也可以来自内部。在本课题中
主要考虑来自点火系统的电磁干扰。一般采取屏蔽的方法,设计主要考
虑地线系统、屏蔽和布局。
(3)
电源干扰是由于供电系统不稳定引起的,主要表现在电源欠压、
过压、浪涌、尖峰电压、电源电压波动。对策是选取高性能的稳压电源
和电源滤波器。
(4)
过程通道干扰指信息在传递过程中窜入的干扰。抑制过程通道
干扰的主要措施有:用光耦将模拟信号和数字信号隔离;长距离传输可
以采用双绞线,还可以用屏蔽线传输和积分网络以防窄脉冲的干扰。
干扰的产生必须具备三个基本因素,即干扰源、耦合通道、对干扰
信号敏感的电路。本系统主要从后两个方面入手,采取切断干扰的耦合
51
通道,降低应用系统对干扰的敏感等抗干扰措施[34]。
5.2 硬件抗干扰方法
系统硬件抗干扰设计是整个系统抗干扰设计的主要部分,它是软件
抗干扰设计的基础,必须为软件抗干扰设计提供良好的条件。
1.
电源设计
由于汽车蓄电池的工作负载变化大,电压波动范围较大,而汽车仪
表系统的微机电路和A/D转换电路对电源的要求很高,要求电压保持
在
+5V,且波动范围在5%
以内,否则将使测量的误差增大。因此设计
中采取了以下措施:
(1)
采用高性能的开关电源稳压器克服电池欠压得影响。
(2)
采用瞬态抑制二极管抑制电源反压和瞬时过压。
(3)
采用低通滤波器滤除高次谐波改善电源波形;
(4)
将数字和模拟电源进行隔离,防止交叉干扰。
(5)
用小电感和大电容滤波,尽量减小电路的感生电动势。
2. 长线传输的抗干扰设计
在过程通道干扰中,长线传输引起的长线效应干扰是主要干扰。一
般而言,对于主振频率为
l0MHz时,超过0.2m
就应作长线处理[33],在本
仪表系统中,主振频率为
12MHz
,且信号传输距离都较远,尤其对于发
动机后置的大型客车来说,传输距离就更远,由于传输线上分布电容、
电感和漏电阻的影响,特别是脉冲信号,它们在传输线上传输时会出现
延时、畸变、衰减现象,除此之外,长线传输时其外界耦合干扰也不可
忽视。为保证长线传输的可靠性,应采取屏蔽线传输,同时要求信号线
固定牢,防止作切割磁力线运动,减少干扰传入。采用光电隔离器件可
以使组件之间脱离电联系,消除用连接方式所造成的组件间的电位差。
此外还应采取阻抗匹配措施。
3. 印刷电路版抗干扰设计
印刷电路板的合理设计,可以抑制大部分的干扰,对软硬件的调试
和调机更为重要。在印刷电路板上,电源线、信号线和元器件的高度集
中,它们紧紧连在一起,电气上相互影响,因而印刷电路板的设计,直
接决定系统的抗干扰能力。在布线和元器件的布置方面必须符合抗干扰
的设计原则,设计中主要考虑了以下几点:
52
电源电路集中放置,根据电流的大小,尽量增加电源走线宽度;尽量
使电源线的走向与数据的传递方向一致;设计电源地、模拟地和数字地,
并相互隔离;尽量加粗接地线,同时大面积敷铜;各信号线分开布线;
在印刷电路板的关键部分配置去耦电容。
5.2 软件抗干扰方法
除了主要的硬件抗干扰措施之外,软件上也应该通过编程来进一步
提高系统的整体的党干扰性能,弥补硬件的不足之处。下面介绍本系统
采用的两种软件抗干扰方法。
1. 数字滤波法
数字滤波是用软件实现某种数学运算,对数据进行处理,以达到滤
波的效果。它不需要增加硬件设备,可以多个通道共用,能灵活修改滤
波参数,但由于指令执行速度受到限制,适用于低通滤波器,或抑制尖
峰干扰
[35]
。本系统采用算数滤波法来滤除模拟量中的干扰。算数滤波法
的原理是对经过多次采样然后对采样值取平均。
2. 软件运行失常抗干扰设计
系统在大多数干扰源的影响下,最终结果是“死机”。根本原因是,
CPU
执行指令时受到干扰,使操作码或地址码发生了改变,导致程序计
数器
PC的值改变。PC
值指向操作数,把操作数当作指令码执行;或者
PC
值超出应用程序区,把非程序区的数据或随机数据当作指令码执行,
致使程序盲目运行
(即跑飞)
,最终进入死循环。要使进入死循环的失常
程序自动恢复,重新正确工作,主要是采用软件的方法,或软硬件结合
的方法,重新起动执行程序。本系统采用看门狗方法。
P87C591
内部自带了11位预分频器的8位看门狗定时器T3,T3溢
出将产生复位脉冲使系统复位,程序正常运行时,每隔一定时间对其进
行重新装载,使其不能溢出,一旦程序跑飞,不能完成装载,T3将产
生溢出。看门狗定时器的重装周期必须小于已编程的看门狗间隔。看门
狗间隔可编程为
1024us~261ms。
53
第六章 结论
随着信息技术、计算机技术、网络技术和电子技术的飞速发展,其
在汽车仪表设计中也发挥着越来越重要的作用。汽车网络化作为汽车电
子系统发展的重要趋势,其对于新一代汽车性能的深远影响己经通过在
商品化车型上的成功应用逐渐显现出来。因此,将
CAN
总线技术引入
到汽车仪表中是当前汽车仪表设计的重要环节。
本文设计的汽车仪表是以飞利浦公司生产的P87C591单片机为核
心,设计了
CAN
接口,并引入微步进电机技术,对车速、转速、冷却
水温度、机油压力和行驶里程
5个参数进行实时的测量、显示和发送。
本文完成了从信号采集到显示及传输的硬件及软件设计。
通过对仪表的研究与调试,得出以下结论:
(1)
在总体结构设计中,本文成功的将CAN总线引入到汽车仪表
设计通信中,利用现场总线的通信速率高、容错性强等特点,提高了整
个汽车仪表系统的现场数据通信的实时性和可靠性,大大的节约和简化
汽车布线系统。
(2)
以微处理器为核心的汽车组合仪表能大幅度提高测量精度和测
量的实时性,同时克服了机械式仪表的无法回避的缺点。
(3)
以步进电机替代传统的动圈式和动磁式机芯作为显示器件可以
大大提高显示的精度,减少指针的抖动,提高机芯的使用寿命。
(4)
抗干扰是系统的关键问题,采用软硬件结合的方法,可以取得
较为满意的抗干扰效果。其中硬件抗干扰设计是整个系统抗干扰设计的
主要部分,是软件抗干扰设计的基础。本文对波形转换电路和系统电源
作了详尽的设计,保证了系统的可靠性。
(5)
本系统的优点是体积小,精度高,系统实时性好,容易扩展,
便于接入CAN网络而不用改变系统的硬件设计。
随着汽车电子技术的不断发展以及计算机在信息与控制领域的广
泛应用,汽车仪表板上显示的信息不断增加,特别是近年来在线故障自
诊断系统、智能交通系统、全球定位导航系统和电子自动驾驶系统等新
技术产品的陆续装车应用对汽车仪表提出了更高的要求。因此将操作系
统和专用的车辆仪表芯片应用到汽车仪表的开发中成为必然的趋势。例
如富士通公司推出的
MB90420G/425G系列16
位单片机就使一款专门为