halcon定位学习基于形状的匹配
HALCON形状匹配总结
HALCON形状匹配总结Halcon有三种模板匹配方法:即Component-Based、Gray-Value-Based、Shaped_based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配,此外还有变形匹配和三维模型匹配也是分属于前面的大类本文只对形状匹配做简要说明和补充:Shape_Based匹配方法:上图介绍的是形状匹配做法的一般流程及模板制作的两种方法。
先要补充点知识:形状匹配常见的有四种情况一般形状匹配模板shape_model、线性变形匹配模板planar_deformable_model、局部可变形模板local_deformable_model、和比例缩放模板Scale_model第一种是不支持投影变形的模板匹配,但是速度是最高的,第二种和第四种是支持投影变形的匹配,第三种则是支持局部变形的匹配。
一般形状匹配模板是最常用的,模板的形状和大小一经制作完毕便不再改变,在查找模板的过程中,只会改变模板的方向和位置等来匹配目标图像中的图像。
这个方法查找速度很快,但是当目标图像中与模板对应的图像存在比例放大缩小或是投影变形如倾斜等,均会影响查找结果。
涉及到的算子通常为create_shape_model 和find_shape_model线性变形匹配模板planar_deformable_model是指模板在行列方向上可以进行适当的缩放。
行列方向上可以分别独立的进行一个适当的缩放变形来匹配。
主要参数有行列方向查找缩放比例、图像金字塔、行列方向匹配分数(指可接受的匹配分数,大于这个值就接受,小于它就舍弃)、设置超找的角度、已经超找结果后得到的位置和匹配分数线性变形匹配又分为两种:带标定的可变形模板匹配和不带标定的可变形模板匹配。
涉及到的算子有:不带标定的模板:创建和查找模板算子create_planar_uncalib_deformable_model和find_planar_uncalib_deformable_model带标定模板的匹配:先读入摄像机内参和外参read_cam_par 和read_pose 创建和查找模板算子create_planar_calib_deformable_model和find_planar_calib_deformable_model局部变形模板是指在一张图上查找模板的时候,可以改变模板的尺寸,来查找图像上具有局部变形的模板。
(转)基于形状匹配的Halcon算子create_shape_model
(转)基于形状匹配的Halcon算⼦create_shape_model HDevelop开发环境中提供的匹配的⽅法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。
这三种匹配的⽅法各具特点,分别适⽤于不同的图像特征,但都有创建模板和寻找模板的相同过程。
这三种⽅法⾥⾯,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了⽤其他⼯具,⽐如VC++来开发的过程。
在VC下往往针对不同的图像格式,就会弄的很头疼,更不⽤说编写图像特征提取、模板建⽴和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不⼀定会显著。
下⾯我就具体地谈谈基于HALCON的形状匹配算法的研究和⼼得总结。
1. Shape-Based matching的基本流程HALCON提供的基于形状匹配的算法主要是针对感兴趣的⼩区域来建⽴模板,对整个图像建⽴模板也可以,但这样除⾮是对象在整个图像中所占⽐例很⼤,⽐如像视频会议中⼈体上半⾝这样的图像,我在后⾯的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后⾯再讲。
基本流程是这样的,如下所⽰:⑴⾸先确定出ROI的矩形区域,这⾥只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你⽣成⼀个矩形,利⽤area_center()找到这个矩形的中⼼;⑵然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建⽴模板,⽽在建⽴模板之前,可以先对这个区域进⾏⼀些处理,⽅便以后的建模,⽐如阈值分割,数学形态学的⼀些处理等等;⑶接下来就可以利⽤create_shape_model()来创建模板了,这个函数有许多参数,其中⾦字塔的级数由Numlevels指定,值越⼤则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定⾓度范围搜索的步长;这⾥需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。
halcon——缺陷检测常用方法总结(模板匹配(定位)+差分)
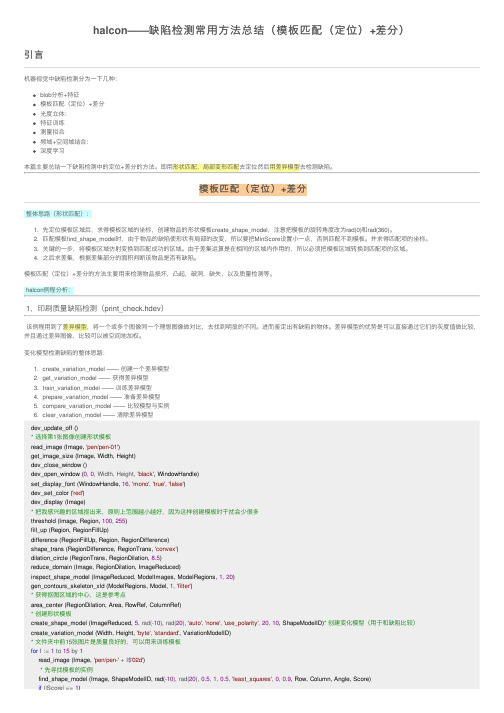
halcon——缺陷检测常⽤⽅法总结(模板匹配(定位)+差分)引⾔机器视觉中缺陷检测分为⼀下⼏种:blob分析+特征模板匹配(定位)+差分光度⽴体:特征训练测量拟合频域+空间域结合:深度学习本篇主要总结⼀下缺陷检测中的定位+差分的⽅法。
即⽤形状匹配,局部变形匹配去定位然后⽤差异模型去检测缺陷。
模板匹配(定位)+差分整体思路(形状匹配):1. 先定位模板区域后,求得模板区域的坐标,创建物品的形状模板create_shape_model,注意把模板的旋转⾓度改为rad(0)和rad(360)。
2. 匹配模板find_shape_model时,由于物品的缺陷使形状有局部的改变,所以要把MinScore设置⼩⼀点,否则匹配不到模板。
并求得匹配项的坐标。
3. 关键的⼀步,将模板区域仿射变换到匹配成功的区域。
由于差集运算是在相同的区域内作⽤的,所以必须把模板区域转换到匹配项的区域。
4. 之后求差集,根据差集部分的⾯积判断该物品是否有缺陷。
模板匹配(定位)+差分的⽅法主要⽤来检测物品损坏,凸起,破洞,缺失,以及质量检测等。
halcon例程分析:1,印刷质量缺陷检测(print_check.hdev)该例程⽤到了差异模型,将⼀个或多个图像同⼀个理想图像做对⽐,去找到明显的不同。
进⽽鉴定出有缺陷的物体。
差异模型的优势是可以直接通过它们的灰度值做⽐较,并且通过差异图像,⽐较可以被空间地加权。
变化模型检测缺陷的整体思路:1. create_variation_model —— 创建⼀个差异模型2. get_variation_model —— 获得差异模型3. train_variation_model —— 训练差异模型4. prepare_variation_model —— 准备差异模型5. compare_variation_model —— ⽐较模型与实例6. clear_variation_model —— 清除差异模型dev_update_off ()* 选择第1张图像创建形状模板read_image (Image, 'pen/pen-01')get_image_size (Image, Width, Height)dev_close_window ()dev_open_window (0, 0, Width, Height, 'black', WindowHandle)set_display_font (WindowHandle, 16, 'mono', 'true', 'false')dev_set_color ('red')dev_display (Image)* 把我感兴趣的区域抠出来,原则上范围越⼩越好,因为这样创建模板时⼲扰会少很多threshold (Image, Region, 100, 255)fill_up (Region, RegionFillUp)difference (RegionFillUp, Region, RegionDifference)shape_trans (RegionDifference, RegionTrans, 'convex')dilation_circle (RegionTrans, RegionDilation, 8.5)reduce_domain (Image, RegionDilation, ImageReduced)inspect_shape_model (ImageReduced, ModelImages, ModelRegions, 1, 20)gen_contours_skeleton_xld (ModelRegions, Model, 1, 'filter')* 获得抠图区域的中⼼,这是参考点area_center (RegionDilation, Area, RowRef, ColumnRef)* 创建形状模板create_shape_model (ImageReduced, 5, rad(-10), rad(20), 'auto', 'none', 'use_polarity', 20, 10, ShapeModelID)* 创建变化模型(⽤于和缺陷⽐较)create_variation_model (Width, Height, 'byte', 'standard', VariationModelID)* ⽂件夹中前15张图⽚是质量良好的,可以⽤来训练模板for I := 1 to 15 by 1read_image (Image, 'pen/pen-' + I$'02d')* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score)if (|Score| == 1)if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 训练差异模型train_variation_model (ImageTrans, VariationModelID)dev_display (ImageTrans)dev_display (Model)endifendfor* 获得差异模型get_variation_model (MeanImage, VarImage, VariationModelID)* 做检测之前可以先⽤下⾯这个算⼦对可变模型进⾏设参,这是⼀个经验值,需要调试者调整prepare_variation_model (VariationModelID, 20, 3)dev_set_draw ('margin')NumImages := 30* 可变模板训练完成后,我们终于可以进⼊主题,马上对所有图像进⾏缺陷检测,思想就是差分for I := 1 to 30 by 1read_image (Image, 'pen/pen-' + I$'02d')* 要注意做差分的两幅图像分辨率相同,当然也需要通过仿射变换把待检测的图像转到与模板图像重合* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score) if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 抠图reduce_domain (ImageTrans, RegionDilation, ImageReduced)* 差分(就是检查两幅图像相减,剩下的区域就是不同的地⽅了,与模板图像不同的地⽅就是缺陷)*这⾥可不能⽤difference做差分啊,halcon为变形模板提供了专门的差分算⼦:compare_variation_modelcompare_variation_model (ImageReduced, RegionDiff, VariationModelID)connection (RegionDiff, ConnectedRegions)* 特征选择:⽤⼀些特征来判断这幅图像印刷是否有缺陷,这⾥使⽤⾯积* 其实可以考虑利⽤区域⾯积的⼤⼩来判断缺陷的严重程度,这⾥就不过多讨论了select_shape (ConnectedRegions, RegionsError, 'area', 'and', 20, 1000000)count_obj (RegionsError, NumError)dev_clear_window ()dev_display (ImageTrans)dev_set_color ('red')dev_display (RegionsError)set_tposition (WindowHandle, 20, 20)if (NumError == 0)dev_set_color ('green')write_string (WindowHandle, 'Clip OK')elsedev_set_color ('red')write_string (WindowHandle, 'Clip not OK')endifendifif (I < NumImages)disp_continue_message (WindowHandle, 'black', 'true')stop ()endifendfor* 结语:如果发现前⾯作为训练变形模板的良好图像也被判定为NG,* 可以调整prepare_variation_model参数* 或者调整select_shape特征筛选的标准相关算⼦分析:create_variation_model(创建⼀个差异模型)create_variation_model(Width, Height, Type, Mode ,ModelID)//创建⼀个ID为ModelID,宽为Width,⾼为Height,类型为Type的差异模型参数参数Mode决定了创建标准图像和相应的变化图像的⽅法。
HALCON形状匹配总结

HALCON形状匹配总结Halcon有三种模板匹配方法:即Component-Based、Gray-Value-Based、Shaped_based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配,此外还有变形匹配和三维模型匹配也是分属于前面的大类本文只对形状匹配做简要说明和补充:Shape_Based匹配方法:上图介绍的是形状匹配做法的一般流程及模板制作的两种方法。
先要补充点知识:形状匹配常见的有四种情况一般形状匹配模板shape_model、线性变形匹配模板planar_deformable_model、局部可变形模板local_deformable_model、和比例缩放模板Scale_model第一种是不支持投影变形的模板匹配,但是速度是最高的,第二种和第四种是支持投影变形的匹配,第三种则是支持局部变形的匹配。
一般形状匹配模板是最常用的,模板的形状和大小一经制作完毕便不再改变,在查找模板的过程中,只会改变模板的方向和位置等来匹配目标图像中的图像。
这个方法查找速度很快,但是当目标图像中与模板对应的图像存在比例放大缩小或是投影变形如倾斜等,均会影响查找结果。
涉及到的算子通常为create_shape_model 和find_shape_model线性变形匹配模板planar_deformable_model是指模板在行列方向上可以进行适当的缩放。
行列方向上可以分别独立的进行一个适当的缩放变形来匹配。
主要参数有行列方向查找缩放比例、图像金字塔、行列方向匹配分数(指可接受的匹配分数,大于这个值就接受,小于它就舍弃)、设置超找的角度、已经超找结果后得到的位置和匹配分数线性变形匹配又分为两种:带标定的可变形模板匹配和不带标定的可变形模板匹配。
涉及到的算子有:不带标定的模板:创建和查找模板算子create_planar_uncalib_deformable_model和find_planar_uncalib_deformable_model带标定模板的匹配:先读入摄像机参和外参 read_cam_par 和read_pose 创建和查找模板算子create_planar_calib_deformable_model和find_planar_calib_deformable_model局部变形模板是指在一图上查找模板的时候,可以改变模板的尺寸,来查找图像上具有局部变形的模板。
halcon形状识别原理
halcon形状识别原理Halcon形状识别原理一、引言形状识别是计算机视觉领域中的一个重要研究方向,它可以通过对图像中的形状进行分析和识别,实现对不同物体的自动识别和分类。
Halcon是一种强大的机器视觉软件库,它提供了丰富的形状识别算法和工具,可以帮助开发者快速实现形状识别功能。
二、Halcon形状识别原理Halcon的形状识别原理基于模板匹配和形状匹配两种方法。
1. 模板匹配模板匹配是一种常用的形状识别方法,它通过将已知形状的模板与待识别图像进行匹配,从而找到最佳匹配结果。
Halcon中的模板匹配算法包括灰度匹配、彩色匹配和形状匹配等。
其中,形状匹配是一种基于二值图像的匹配方法,它通过将待识别图像和模板图像进行二值化处理,然后计算它们的形状特征,最后进行形状匹配,找到最佳匹配结果。
2. 形状匹配形状匹配是Halcon独有的形状识别方法,它是一种基于模板匹配的改进算法,可以更好地解决形状变化、光照变化等问题。
形状匹配的原理是将待识别图像和模板图像进行灰度化处理,然后计算它们的形状特征,包括区域面积、周长、中心距等。
接着,通过计算形状特征之间的相似度,找到最佳匹配结果。
三、Halcon形状识别应用Halcon形状识别广泛应用于工业自动化领域,例如产品质量检测、物体定位和识别等。
下面以产品质量检测为例,介绍Halcon形状识别的应用过程。
1. 数据采集需要采集一组有标记的产品样本图像作为训练数据,包括合格品和不合格品。
这些图像可以通过相机进行实时采集,也可以从图像数据库中获取。
2. 数据预处理对于采集到的图像数据,需要进行预处理,包括去噪、灰度化、二值化等操作。
预处理可以提高形状识别的准确性和效率。
3. 模板创建根据合格品的图像样本,可以创建一个或多个形状模板。
模板可以是二值图像,也可以是轮廓点集等形式。
模板的创建可以通过手动标记或自动提取等方式实现。
4. 形状匹配在进行形状匹配之前,需要设置一些匹配参数,如匹配算法、相似度阈值等。
HALCON形状匹配总结
HALCON形状匹配总结Halcon有三种模板匹配方法:即Component-Based、Gray-Value-Based、Shaped_based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配,此外还有变形匹配和三维模型匹配也是分属于前面的大类本文只对形状匹配做简要说明和补充:Shape_Based匹配方法:上图介绍的是形状匹配做法的一般流程及模板制作的两种方法。
先要补充点知识:形状匹配常见的有四种情况一般形状匹配模板shape_model、线性变形匹配模板planar_deformable_model、局部可变形模板local_deformable_model、和比例缩放模板Scale_model第一种是不支持投影变形的模板匹配,但是速度是最高的,第二种和第四种是支持投影变形的匹配,第三种则是支持局部变形的匹配。
一般形状匹配模板是最常用的,模板的形状和大小一经制作完毕便不再改变,在查找模板的过程中,只会改变模板的方向和位置等来匹配目标图像中的图像。
这个方法查找速度很快,但是当目标图像中与模板对应的图像存在比例放大缩小或是投影变形如倾斜等,均会影响查找结果。
涉及到的算子通常为create_shape_model 和find_shape_model线性变形匹配模板planar_deformable_model是指模板在行列方向上可以进行适当的缩放。
行列方向上可以分别独立的进行一个适当的缩放变形来匹配。
主要参数有行列方向查找缩放比例、图像金字塔、行列方向匹配分数(指可接受的匹配分数,大于这个值就接受,小于它就舍弃)、设置超找的角度、已经超找结果后得到的位置和匹配分数线性变形匹配又分为两种:带标定的可变形模板匹配和不带标定的可变形模板匹配。
涉及到的算子有:不带标定的模板:创建和查找模板算子create_planar_uncalib_deformable_model和find_planar_uncalib_deformable_model带标定模板的匹配:先读入摄像机内参和外参read_cam_par 和read_pose 创建和查找模板算子create_planar_calib_deformable_model和find_planar_calib_deformable_model局部变形模板是指在一张图上查找模板的时候,可以改变模板的尺寸,来查找图像上具有局部变形的模板。
基于形状的模板匹配原理 halcon实现步骤
基于形状的模板匹配原理halcon实现步骤
基于形状的模板匹配是一种图像处理技术,其原理是使用形状模板与目标图像进行匹配,以实现目标检测、识别和定位等功能。
以下是基于形状的模板匹配的原
理和Halcon实现步骤:
原理:
基于形状的模板匹配的原理是将形状模板与目标图像进行匹配,以找到最佳的匹配结果。
该方法通常使用边缘特征、轮廓特征、矩特征等形状特征来描述模板和目标图像的形状特性。
在匹配过程中,通过计算模板与目标图像之间的相似度、距离等度量值,以确定最佳的匹配位置和旋转角度等参数。
Halcon实现步骤:
1.创建形状模板:首先需要准备一个形状模板,可以使用Halcon提供的函数和工具箱
创建或导入已有的模板。
2.加载目标图像:使用Halcon的图像处理函数加载需要进行匹配的目标图像。
3.预处理图像:对目标图像进行必要的预处理,如滤波、降噪、边缘检测等,以提高
匹配精度和稳定性。
4.特征提取:使用Halcon提供的特征提取函数,从形状模板和目标图像中提取形状特
征,如边缘、轮廓、矩等。
5.模板匹配:将提取出的形状特征与形状模板进行匹配,计算相似度、距离等度量值,
以确定最佳的匹配位置和旋转角度等参数。
6.结果输出:将匹配结果输出到控制台或保存到文件中,以便后续处理和应用。
需要注意的是,基于形状的模板匹配方法对于光照变化、噪声干扰、遮挡等情况具有一定的鲁棒性,但在旋转、缩放等情况下可能会出现匹配精度下降的问题。
因此,在实际应用中需要根据具体场景和需求选择合适的算法和参数设置。
openCV实现halcon的基于形状的匹配
openCV实现halcon的基于形状的匹配OpenCV是一个流行的计算机视觉库,提供了许多功能强大的图像处理和分析工具。
在OpenCV中,可以使用不同的方法实现基于形状的匹配,类似于Halcon库中的功能。
基于形状的匹配是通过比较目标形状和参考形状之间的相似性来寻找匹配项。
在OpenCV中,可以使用轮廓特征和模板匹配等技术来实现形状匹配。
首先,通过使用OpenCV的图像处理函数,可以对输入图像进行预处理,以提取感兴趣的区域或形状。
例如,可以使用二值化、边缘检测或形态学操作来提取目标形状的轮廓。
接下来,可以使用轮廓特征来比较目标形状和参考形状之间的相似性。
通过计算轮廓的形状描述符,如Hu矩、Zernike矩或Fourier描述符,可以量化形状的特征。
然后,可以使用形状描述符之间的距离度量来比较目标形状和参考形状之间的相似性。
在OpenCV中,可以使用函数如matchShapes(来计算轮廓的相似性度量。
该函数返回一个介于0和1之间的值,值越接近0表示形状越相似。
另一种常用的基于形状的匹配方法是模板匹配。
模板匹配是在输入图像中寻找与参考形状最相似的图像区域。
在OpenCV中,可以使用函数如matchTemplate(来执行模板匹配操作。
该函数使用滑动窗口的方式在输入图像上移动,并计算每个位置与参考形状的相似度得分。
最后,可以根据得分对匹配结果进行排序,并选择与参考形状相似度最高的匹配项作为最终的识别结果。
需要注意的是,在实现基于形状的匹配时,可能还需要考虑形变、旋转和缩放等因素。
为了提高匹配的准确性和鲁棒性,可以尝试使用图像归一化技术,如尺度不变特征变换(SIFT)或速度与环境不变特征(SURF)等。
总之,OpenCV提供了多种方法来实现基于形状的匹配,类似于Halcon库中的功能。
通过使用轮廓特征和模板匹配等技术,结合适当的图像处理和分析步骤,可以实现准确的形状匹配并应用于各种计算机视觉应用领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
h a l c o n定位学习基于
形状的匹配
IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
1、基于形状的匹配
1>创建ROI?
使用Halcon算子可以方便的设置ROI?
标准形状?
◆draw_rectangle1/2
◆draw_circle
◆draw_ellipse
◆draw_line
任意形状?
◆draw_region
◆draw_polygon
生成标准ROI?
◆gen_rectangle1/2
◆gen_circle
◆gen_ellipse
◆gen_region_line
通过XLD创建AOI?
◆gen_region_contour_xld
◆gen_region_polygon_xld
2>生成ROI
根据创建模板时得到的数据,生成ROI区域,例如
gen_rectangle2(ROI,Row,Column,Phi,Length1,Length2)
3>修正ROI
修正函数?
◆erosion_*减小ROI?
◆dilation_*扩大ROI?
◆shape_trans形状转换?
◆boundary像素级边界?
◆move_region移动区域到新位置?
组合?
◆Intersection交集?
◆Difference差集?
◆Union2并集
4>直接创建模板
create_shape_model(
Template,
参数Optimization
一些模板包含了太多像素点,这导致
◆模板过大?
◆增加执行时间?
◆增加了内存需求?
参数Optimization用来减少这些点?
◆none不减少像素?
◆point_reduction_low大约一半点?
◆point_reduction_medium大约1/3?
◆point_reduction_high大约1/4?
减少点可能导致的问题?
◆可能导致无法创建高层金字塔?
◆有可能会降低结果的精度和准确度原则?
◆边缘较多时才减少?
相同环境下,Optimization取值不同时的运行时间对比?
◆
◆
◆
◆
参数-MinContrast
参数MinContrast是在查找模板的时候,来减少“有害”边缘的。
它的值可通过下面方法得到
◆estimate_noise函数?
◆inspect_shape_model函数
5>模板参数-程序获取
determine_shape_model_params(
Template,模板
‘auto’,金字塔层数
0,起始角度
rad(360),角度范围
,缩小范围?
,放大范围
‘auto’,减少像素的方法
‘use_polarity’,极性
‘auto’,对比度
‘auto’,最小对比度
‘all’,Whichvalues
ParameterName,Nameofvalues ParameterValue)Values
6>通过Dxf文件创建模板
通过像素轮廓可以直接创建模板?
◆read_contour_xld_dxf
◆create_shape_model_xld
◆create_scaled_shape_model_xld
◆create_aniso_shape_model_xld
7>边界处理
HALCON提供了两种边界处理方法? set_system(’border_shape_models’,’false‘)◆模板必须在roi内?
◆靠近边缘部分会被裁减?
set_system(’border_shape_models’,’true‘)◆模板可以部分在ROI外面?
◆注意:分值会降低。