曲柄滑块机构
曲柄滑块机构的结构
工作原理
当曲柄绕固定轴转动 时,通过连杆带动滑 块做往复直线运动。
通过改变曲柄的转速 和转向,可以控制滑 块的往复运动速度和 方向。
曲柄的长度和安装位 置可以改变滑块的行 程长度和方向。
应用领域
内燃机
曲柄滑块机构广泛应用于内燃机的活塞运动,通过曲柄的转动使活塞 进行往复运动,实现内燃机的吸气、压缩、做功和排气过程。
可能是由于润滑不良、部件磨损或异物卡住引起 的。应检查润滑状况,清洁机构并更换磨损部件。
异响
可能是由于部件松动、润滑不良或部件损坏引起 的。应检查紧固件和润滑状况,必要时更换损坏 部件。
精度下降
可能是由于部件磨损、松动或导轨弯曲引起的。 应检查并调整部件的精度,必要时更换磨损部件 或修正导轨。
谢谢观看
热处理工艺
总结词
热处理工艺能够显著提高材料的机械性能,是曲柄滑块机构优化的重要环节。
详细描述
热处理工艺包括淬火、回火、表面淬火和化学热处理等。淬火可以提高材料的硬度和强度,回火则可以改善材料 的韧性和降低内应力。表面淬火可以强化材料表面的硬度,提高耐磨性。化学热处理可以改变材料表面的化学成 分,提高耐腐蚀性和疲劳强度。
曲柄滑块机构的结构
目录
• 曲柄滑块机构简介 • 曲柄滑块机构类型 • 曲柄滑块机构的设计 • 曲柄滑块机构的优化 • 曲柄滑块机构的维护与保养
01
曲柄滑块机构简介
定义与特点
定义
曲柄滑块机构是一种将曲柄的回 转运动转化为滑块的往复直线运 动的机构。
特点
结构简单,工作可靠,能实现精 确的直线运动,且运动范围较大 ,因此在各种机械装置中得到广 泛应用。
总结词
当曲柄绕机架转动时,导杆仅作直线往复运动的曲柄滑块机构。
曲柄滑块机构的结构
• 闭式机身有整体式和组合式两种.闭式机身承 载能力大,刚度较好.所以,从小型精密压力机到 超大型压力机大都采用这种形式.
• 组合式〔见图b〕机身是用拉紧螺栓将上梁、 立柱和底座拉紧,紧固成为一体的,加工和运输 比较方便,大中型压力机应用较广.
• 整体式机身〔见图a〕,有时为了增强刚性也 有使用拉紧螺栓的.虽然整体式机身加工装配 工作量较小,但需要大型加工设备,运输也较困 难.因此,一般被限制在3000kN以下的压 力机上应用.
轴式的曲柄滑块机构在大型压力机上 的应用受到限制.
• 曲拐轴式曲柄滑块机构便 于实现可调行程且结构较 简单,但由于曲柄悬伸,受 力情况较差,因此主要在中、 小型机械压力机上应用.
• 偏心齿轮工作时只传递扭矩,弯矩 由芯轴承受,因此偏心齿轮的受力 比曲轴简单些,芯轴只承受弯矩,受 力情况也比曲轴好,且刚度较大.此 外,偏心齿轮的铸造比曲轴锻造容 易解决,但总体结构相对复杂些.所 以,偏心齿轮驱动的曲柄及滑块机 构常用于大中型压力机.
• 开式机身压力机的弹性变形、机身的角变 形使滑块下平面与垫板〔或工作台〕上平 面的平行度下降,引起模具的导柱导套和滑 块导轨过热,严重磨损,使加工出的零件精度 降低,尤其对压印加工或整形加工,这种不良 影响可以说是致命的缺陷,如后图a所示.
• 另外,角变形造成滑块的上下运动与工作 台〔或垫板〕上平面的垂直度的降低,将 使冲头和凹模倾斜一角度,促使模具间隙 不均匀,并产生水平方向的侧压力,不仅影 响冲压件的尺寸精度,而且还会加速模具 的磨损甚至使冲头折断,特别是对薄板冲 压加工工艺影响尤其严重,如后图b、c 所示.
• 压力机的工作台、垫板及滑块,在负荷状态下,如果 出现如下图所示那样的挠度,平面度就会被严重破 坏,尤其在双动或双点压力机中,这一点特别明显.
曲柄滑块机构的演化

案例三:机器人关节中的曲柄滑块机构
在机器人关节设计中,曲柄滑块机构被用于实现关节的转动或伸缩运动。通过调整曲柄长度和滑块位置,可以改变机器人的 姿态和运动轨迹,使其能够完成复杂和灵活的动作。
在火炮的设计中,曲柄滑 块机构被用于调整火炮的 射击角度。
技术进步
材料科学
随着材料科学的进步,曲柄滑块机构的设计和制造材料得到了改 进,提高了机构的强度和耐久性。
计算机辅助设计
计算机辅助设计技术的发展使得曲柄滑块机构的设计更加精确和 优化。
动力学分析
动力学分析技术的发展使得曲柄滑块机构的运动性能和力学性能 得到了更好的理解和优化。
演化结果
提高工作效率
经过不断演化,曲柄滑块机构的 工作效率得到显著提高,能够满 足高强度、高速度和高精度的生 产需求。
降低能耗
优化后的曲柄滑块机构具有更低 的能耗,有助于实现绿色、节能 的生产目标。
提高柔性化水平
智能化的曲柄滑块机构具有更高 的柔性化水平,能够适应多样化 的生产需求和市场变化。
04
曲柄滑块机构的演化
目录
• 曲柄滑块机构简介 • 曲柄滑块机构的发展历程 • 曲柄滑块机构的演化过程 • 曲柄滑块机构的未来展望 • 曲柄滑块机构演化案例分析
01
曲柄滑块机构简介
定义与特点
定义
曲柄滑块机构是一种将曲柄的回转运 动转化为滑块的往复直线运动的机构 。
特点
结构简单、紧凑,运动副接触面积小 ,传动效率高,适用于实现往复运动 和间歇运动。
演化路径
曲柄滑块机构工作原理

曲柄滑块机构工作原理一、引言曲柄滑块机构是机械传动中常用的一种机构,它能将旋转运动转化为直线运动,广泛应用于各种机械设备中。
本文将详细介绍曲柄滑块机构的工作原理。
二、曲柄滑块机构的组成曲柄滑块机构由曲轴、连杆和滑块三部分组成。
1. 曲轴曲轴是一根直径不等的圆柱体,它通常由多个偏心圆组成。
在工作时,曲轴通过旋转带动连杆和滑块实现运动转换。
2. 连杆连杆是连接曲轴和滑块的零件,它通常由两个铰接连接的杆组成。
在工作时,连杆能够保持与曲轴相切,并使得滑块产生直线运动。
3. 滑块滑块是一个可在直线上自由运动的零件,它通过连杆与曲轴相连。
在工作时,当曲轴旋转时,连杆推动滑块沿着固定方向做直线运动。
三、曲柄滑块机构的工作原理曲柄滑块机构的工作原理可以分为四个阶段:进气、压缩、爆发和排气。
1. 进气阶段在进气阶段,曲轴处于上死点位置,连杆与滑块的夹角为180度。
此时,空气通过进气门进入汽缸内。
2. 压缩阶段在压缩阶段,曲轴开始向下旋转,连杆与滑块的夹角逐渐减小。
此时,活塞开始向上运动,将空气压缩。
3. 爆发阶段在爆发阶段,当曲轴旋转到一定角度时,连杆与滑块的夹角达到最小值。
此时,点火器点燃混合气体,在高温高压下爆炸产生能量。
4. 排气阶段在排气阶段,曲轴继续向下旋转,连杆与滑块的夹角逐渐增大。
此时,活塞开始向下运动,并将燃烧后的废气排出汽缸外。
四、结论通过以上介绍可以看出,在曲柄滑块机构中,曲轴通过旋转带动连杆和滑块实现运动转换。
在工作过程中,曲轴的旋转运动被转化为滑块的直线运动,从而推动活塞完成吸气、压缩、爆发和排气四个阶段的工作。
曲柄滑块的原理及应用

曲柄滑块的原理及应用概述曲柄滑块是一种常见的机械传动装置,主要由曲柄、滑块和连杆组成。
利用曲柄旋转运动,通过连杆将旋转运动转化为直线运动,实现力的传递和工作机构的运动控制。
曲柄滑块具有结构简单、传动效率高等特点,广泛应用于各个领域。
原理曲柄滑块的原理基于连杆机构和曲柄的旋转运动转化为滑块的直线运动。
连杆将曲柄的旋转运动转化为滑块的往复直线运动,实现力的传递。
曲柄滑块的基本结构如下: - 曲柄:具有一端固定,并可以绕自身轴线旋转。
- 连杆:将曲柄的旋转运动转化为滑块的直线运动。
- 滑块:沿连杆的方向进行往复直线运动。
曲柄滑块的工作原理如下: 1. 曲柄通过旋转运动带动连杆运动。
2. 连杆将曲柄的旋转运动转化为滑块的直线运动。
3. 滑块完成往复直线运动,实现力的传递和工作机构的控制。
应用曲柄滑块由于其结构简单、传动效率高等特点,被广泛应用于各个领域,以下是曲柄滑块的几个常见应用示例:1. 内燃机曲柄滑块机构被广泛应用于内燃机的气缸机构中。
内燃机中的曲轴就是一个曲柄滑块机构,通过活塞的上下运动,将往复直线运动转化为曲轴的旋转运动,从而带动车辆驱动轮的转动。
2. 压力机曲柄滑块机构在压力机中也得到了广泛应用。
通过曲柄滑块机构转化运动,将旋转运动转化为直线压力运动,实现对工件的压制和成型。
3. 石油钻机在石油钻机中,曲柄滑块机构用于转动钻杆来实现钻孔。
曲柄滑块机构将旋转运动转化为往复线性运动,带动钻杆快速下压和快速抬起。
4. 壁画机器人曲柄滑块机构还被应用于壁画机器人。
通过控制曲柄滑块机构的运动,实现壁画机械臂的运动控制,完成复杂的绘制工作。
5. 自动包装机在自动包装机中,曲柄滑块机构常用于输送和抓取物品的功能。
通过控制曲柄滑块机构的运动,可以实现快速而准确的物品传递和抓取。
总结曲柄滑块是一种常见的机械传动装置,通过将曲柄的旋转运动转化为滑块的直线运动,实现力的传递和工作机构的控制。
曲柄滑块具有结构简单、传动效率高等优点,被广泛应用于内燃机、压力机、石油钻机、壁画机器人、自动包装机等领域。
对心曲柄滑块机构工作原理
对心曲柄滑块机构工作原理1. 引言嘿,大家好!今天我们要聊聊一个在机械工程界可是小有名气的东西——心曲柄滑块机构。
听名字就觉得高大上,实际上它可不是什么遥不可及的东西,反而是咱们生活中常见的机械结构之一。
别看它名词复杂,实际上就像一场舞蹈,简单却充满了韵律感。
要不,咱们就一起来看看它到底是个啥玩意儿,工作原理又是怎样的吧!2. 心曲柄滑块机构的基本概念2.1 什么是心曲柄滑块机构?心曲柄滑块机构,其实就是一种能把旋转运动转化为直线运动的机械结构。
它的名字里有个“心”,这不是说它情感丰富,而是因为它的核心部分就像心脏一样,负责“跳动”。
简单来说,心曲柄就是个旋转的柄,而滑块则是沿着一条直线移动的部分。
想象一下,就像一个小孩在秋千上荡来荡去,既有旋转又有直线的运动,听起来是不是有点意思?2.2 为什么要用它?那么,心曲柄滑块机构有什么用呢?哎,您别说,这玩意儿可用在很多地方呢。
比如说,咱们日常用的打印机、汽车发动机、甚至一些复杂的机械手臂,都能看到它的身影。
它能把动力传递得相当流畅,就像在赛场上,一个接一个的传球,动作连贯,丝毫不显得笨拙。
3. 工作原理3.1 旋转与滑动的美妙结合心曲柄滑块机构的工作原理,其实就是旋转和直线的完美结合。
想象一下,有一个小圆盘(就是心曲柄),它在不停地转动。
这时候,固定在圆盘上的一根连杆(咱们可以叫它“小手”)也随着圆盘转动。
连杆的另一端呢,则是连接到滑块上的。
当连杆转动的时候,滑块就会跟着左右滑动,完成一个完整的运动周期。
就像一个富有节奏感的舞蹈,让人看得眼花缭乱。
3.2 运动过程中的变化这过程中,滑块的运动轨迹可不是直线,而是呈现出一种优美的弧形,仿佛在进行一场优雅的芭蕾舞。
每次连杆转动,滑块就会跟着调整位置,轻松自如地在轨道上滑动。
想象一下,如果我们用手在桌子上滑动一根铅笔,铅笔尖在桌面上留下的轨迹,就是这种滑动的感觉。
这个过程既简单又神奇,让人忍不住感叹机械的魅力。
曲柄滑块机构工作原理
曲柄滑块机构工作原理介绍曲柄滑块机构是一种常见的机械传动装置,它通过曲柄和滑块的运动实现机械系统的工作。
本文将详细介绍曲柄滑块机构的工作原理、结构特点以及应用领域等内容。
一、工作原理曲柄滑块机构是一种将旋转运动转化为直线运动的机械装置。
它由曲柄和滑块两部分组成。
1. 曲柄曲柄是曲柄滑块机构的主要部分,它通常是一根长杆,其中一端固定于机构的主轴上,另一端通过铰链连接于活动的连杆。
曲柄的主要作用是将旋转运动转化为直线运动,使滑块能够沿特定轨迹运动。
2. 滑块滑块是曲柄滑块机构中的动力元件,通常是一个带有导向槽的平板。
滑块通过导向槽与曲柄相连,当曲柄旋转时,滑块在导向槽的作用下沿特定轨迹进行直线运动。
滑块上通常会安装其他部件,如传感器、工作头等,用于完成特定的功能。
3. 工作过程曲柄滑块机构的工作过程可以分为四个阶段:进给段、短暂停留段、回程段和短暂停留段。
具体过程如下:•进给段:当曲柄开始旋转时,滑块从起始位置开始匀速向前运动,直到滑块达到最大前进位置。
•短暂停留段:滑块到达最大前进位置后,曲柄继续旋转,滑块短暂停留在此位置,为后续工作做准备。
•回程段:当曲柄继续旋转时,滑块开始匀速向后运动,直到滑块回到起始位置。
•短暂停留段:滑块回到起始位置后,曲柄继续旋转一段时间,滑块再次短暂停留在此位置。
二、结构特点曲柄滑块机构具有以下结构特点:1. 简单可靠曲柄滑块机构的结构相对简单,组成部件较少,易于制造和维修。
同时,机构的工作过程清晰明了,稳定可靠,不易出现故障。
2. 运动平稳曲柄滑块机构的滑块运动轨迹为直线运动,具有恒定速度特点,因此运动平稳,震动小,能够满足精密传动的要求。
3. 功能多样曲柄滑块机构可以根据不同的需求,通过改变曲柄的长度、滑块的轨迹以及其他附加部件的设计,实现不同的功能。
例如,可以用于驱动活塞进行往复运动、实现直线切割或焊接等操作。
4. 应用广泛曲柄滑块机构在工业生产中具有广泛的应用。
任务1曲柄压力机中的曲柄滑块机构的设计
运动学优化设计
优化目标确定
根据实际应用需求,确定曲柄滑块机构的优化目标,如减小体积、减轻重量、提高运动精度等。
优化方法选择
选择合适的优化算法或设计方法,如数学规划、遗传算法、模拟退火等,对曲柄滑块机构进行优化设 计。
05 曲柄滑块机构的动力学分 析
动力学模型建立
建立曲柄滑块机构的运动学模型,包括曲柄、连杆和滑块等部件的运动关 系。
在汽车制造、航空航天、化工、食品 加工等领域也有广泛应用。
02 曲柄滑块机构设计基础
机构设计原则
功能性原则
确保曲柄滑块机构能够实现预定的运动和功能要 求。
效率性原则
优化机构设计,提高系统的效率和性能。
可靠性原则
确保机构在各种工作条件下能够稳定、安全地运 行。
机构设计流程
01
需求分析
明确设计需求,包括运动形式、工 作负载、空间限制等。
特点
结构简单、紧凑,能够实现较大 的传动比,且具有较高的传动效 率和可靠性。
工作原理
01
当曲柄绕固定轴转动时,通过连 杆带动滑块沿直线方向往复运动 。
02
曲柄的旋转运动通过连杆转化为 滑块的直线运动,从而实现机械 能的传递和转换。
应用领域
曲柄滑块机构广泛应用于各种机械传 动和加工设备中,如压力机、冲床、 剪床、压缩机等。
影响滑块的移动范围和稳定性。
运动副间隙
影响机构的运动精度和摩擦特性。
03 曲柄滑块机构的结构设计
曲柄设计
曲柄长度
根据压力机的规格和要求,确定 曲柄的长度,以满足工作行程和 传动效率的需求。
曲柄材料
选择具有高强度和耐久性的材料, 如铸钢、合金钢等,以确保曲柄 的刚性和稳定性。
第二章 通用压力机-曲柄滑块机构
柱面连接的连杆滑块结构
• 销子与连杆孔有间隙,工作行程 时,柱面接触,传递载荷。
• 回程时销子承受滑块的重量和脱 模力。
• 调节螺杆 6 和连杆体合起来叫连杆,调节螺杆可以改变连 杆的长度,这种连杆称为长度可变连杆,借此调节压力机 的装模高度。
• 调节螺杆的下端是球头,它放在滑块内的球面下支承座 7 上,用球面压环压住,球面压环与滑块之间用螺钉连接。
• 压力机工作时,连杆与滑块之间的作用力通过球面传递, 这种连杆传力机构又称为球面传力机构。
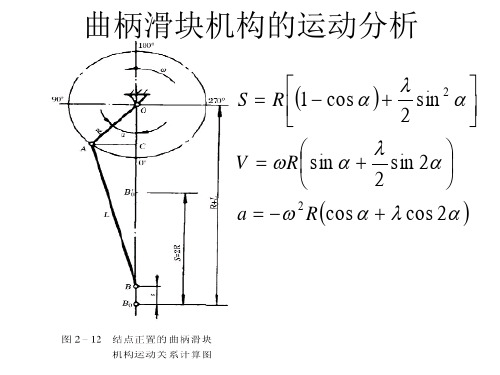
• B 点为连杆与滑块的连结点。 • 曲柄长度为 R,也称为曲柄半径,连
杆长度为 L,λ= R/L 称为连杆系数。 • 对于通用压力机,λ一般为 0.1~0.2。
曲柄转角和滑块位移的关系
• 当曲柄转动时,从上止点转到下止点, 滑 块从 B′0 点降至 B0点,全行程 s = 2 R。
• 设定曲柄转至下死点时的曲柄转角α为 0° ,曲柄逆时针运动至上死点时曲柄转角α 为180° ,连杆中心线与滑块运动方向的 夹角为β。
的间隙,承受偏心载荷时滑块会产生倾斜,加剧模具和导 向面的磨损。 • 导向间隙应该是可调的,便于滑块导向面与机身导轨磨损 后能够调整导向间隙。
滑块导向间隙调节
a) V型导轨 b) 四面导轨 c) 四面斜导轨 d) 八面导轨 e) 导轨间隙调节结构图
滑块材料
• 小型压力机的滑块常用铸铁HT200; • 中型压力机的滑块常用铸铁HT200、稀土球铁、
曲柄滑块机构的结构分析
曲柄滑块机构条件(一)
曲柄滑块机构条件(一)曲柄滑块机构条件什么是曲柄滑块机构?曲柄滑块机构是一种常见的机械传动机构,由曲柄、滑块和连接杆组成。
它通过曲柄的旋转使滑块在直线轨迹上运动,实现力的转换和传递。
曲柄滑块机构的应用领域曲柄滑块机构广泛应用于各种机械装置中,如发动机、压力机、冲压机等。
它具有结构简单、运动规律明确的特点,适用于各种工业领域的力传递和运动控制。
曲柄滑块机构的条件曲柄滑块机构的设计需要满足以下条件:•良好的刚度和稳定性:曲柄滑块机构在工作过程中承受着较大的载荷和振动,因此需要具备足够的刚度和稳定性,以确保其正常工作和长久使用。
•合理的运动特性:曲柄滑块机构的运动特性直接影响其传动效率和运动平稳性,需要根据具体应用要求设计合理的运动规律,如速度、加速度和位置曲线等。
•适当的润滑和密封:曲柄滑块机构的摩擦表面需要进行适当的润滑和密封处理,以减小摩擦损失和延长使用寿命。
•可靠的结构设计:曲柄滑块机构需要经过合理的结构设计,确保各个零部件之间的连接紧固可靠,避免因松动或磨损导致的故障。
曲柄滑块机构的设计要点在设计曲柄滑块机构时,需要注意以下要点:•合理选择曲柄和滑块的尺寸:根据所需的力传递和运动特性需求,选择适当的曲柄和滑块的尺寸,以保证其承载能力和运动平稳性。
•考虑滑块的回转角度:滑块在工作过程中可能会发生回转运动,需要合理设计回转角度和相关的约束装置,以确保机构的正常工作和稳定性。
•合理设置支撑点位置:支撑点的位置对曲柄滑块机构的运动轨迹和力传递效果有着重要影响,需要根据具体需求进行合理设置。
•设计合理的连杆:连杆作为连接曲柄和滑块的重要部件,需要具备足够的刚度和强度,同时根据运动规律进行优化设计,以提高机构的工作效率。
•考虑机构的运动平衡和振动抑制:在曲柄滑块机构设计中,需要考虑机构的运动平衡和振动抑制,通过合理的设计和调整,减小振动幅度和噪声。
结论曲柄滑块机构作为一种常见的机械传动机构,在工业领域发挥着重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
曲柄滑块机构运动分析
曲柄滑块机构运动分析
一、相关参数
在图1所示的曲柄滑块机构中,已知各构件的尺寸分别为mm l 1001=,mm l 3002=,s
rad /101
=ω
,试确定连杆2和滑块3的
位移、速度和加速度,并绘制出运动线图。
图1 曲柄滑块机构
二、数学模型的建立
1、位置分析
为了对机构进行运动分析,将各构件表示为矢量,可写出各杆矢所构成的封闭矢量方程。
C S l l =+21
将各矢量分别向X 轴和Y 轴进行投影,得
sin sin cos cos 22112211=+=+θθθθl l S l l C
(1)
由式(1)得
⎪⎪⎭
⎫
⎝⎛-=2112sin arcsin l l θθ
2211cos cos θθl l S C +=
2、速度分析
将式(1)对时间t 求导,得速度关系
C v l l l l =--=+222111222111sin sin 0
cos cos θωθωθωθω
(2)
将(2)式用矩阵形式来表示,如下所示
⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-11
11122222cos sin . 0 cos 1 sin θθωωθθl l v l l C (3)
3、加速度分析
将(2)对时间t 求导,得加速度关系
⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-11
11111222222222222sin cos 0 sin 0 cos 0 cos 1 sin θωθωωωθωθωαθθl l v l l a l l C C 三、计算程序
1、主程序
%1.输入已知数据 clear; l1=0.1; l2=0.3; e=0; hd=pi/180; du=180/pi; omega1=10; alpha1=0;
%2.曲柄滑块机构运动计算 for n1=1:721
theta1(n1)=(n1-1)*hd;
%调用函数slider_crank计算曲柄滑块机构位移、速度、加速度
[theta2(n1),s3(n1),omega2(n1),v3(n1),alpha2(n1),a3( n1)]=slider_crank(theta1(n1),omega1,alpha1,l1,l2,e); end
figure(1);
n1=0:720;
subplot(2,3,1)
plot(n1,theta2*du);
title('连杆转角位移线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('连杆角位移/\circ');
grid on
subplot(2,3,2)
plot(n1,omega2);
title('连杆角速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('连杆角速度/rad\cdots^{-1}');
grid on
subplot(2,3,3)
plot(n1,alpha2);
title('连杆角加速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('连杆角加速度/rad\cdots^{-2}');
grid on
subplot(2,3,4)
plot(n1,s3);
title('滑块位移线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('滑块位移/\m');
grid on
subplot(2,3,5)
plot(n1,v3);
title('滑块速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('滑块速度/m\cdots^{-1}');
grid on
subplot(2,3,6)
plot(n1,a3);
title('滑块加速度运动线图');
xlabel('曲柄转角\theta_1/\circ');
ylabel('滑块加速度/m\cdots^{-2}');
grid on
2、子程序
function[theta2,s3,omega2,v3,alpha2,a3]=slider_cran k(theta1,omega1,alpha1,l1,l2,e);
%计算连杆2的角位移和滑块3的线位移
s3=l1*cos(theta1)+l2*cos(theta2);theta2=asin((e-l1*si n(theta1))/l2);
%计算连杆2的角速度和滑块3的线速度
A=[l2*sin(theta2),1;-l2*cos(theta2),0];
B=[-l1*sin(theta1);l1*cos(theta1)];
omega=A\(omega1*B);
omega2=omega(1);
v3=omega(2);
%计算连杆2的角加速度和滑块3的线加速度
At=[omega2*l2*cos(theta2),0;omega2*l2*sin(theta2), 0];
Bt=[-omega1*l1*cos(theta1);-omega1*l1*sin(theta1)] ;
alpha=A\(-At*omega+alpha1*B+omega1*Bt);
alpha2=alpha(1);
a3=alpha(2);
四、程序运行结果及分析
图2 运动规律曲线图
从仿真曲线可以看出,当曲柄以w1=10rad/s匀速转动时,连杆的转角位移变化范围大约在-20~20度之间,在90°或270°有极值,呈反正弦变化趋势;连杆的角速度变化范围大约在-3.3~3.3rad/s,在0°或180°有极值,成反余弦变化趋势;连杆角加速度变化范围大约在-35~35rad/s2,在90°或270°有极值,呈正弦变化趋势。
滑块位移变化范围大约在0.2~0.4m之间,在0°或180°有极值,呈反余弦变化趋势;滑块速度变化范围大约在-1~1m/s之间,大致上呈正弦变化趋势;滑块加速度变化范围大约在-13~6.9m/s2,在0°或180°有极值。