系统响应及系统稳定性
系统稳定性意义以及稳定性地几种定义
系统稳定性意义以及稳定性的几种定义一、引言:研究系统的稳定性之前,我们首先要对系统的概念有初步的认识。
在数字信号处理的理论中,人们把能加工、变换数字信号的实体称作系统。
由于处理数字信号的系统是在指定的时刻或时序对信号进行加工运算,所以这种系统被看作是离散时间的,也可以用基于时间的语言、表格、公式、波形等四种方法来描述。
从抽象的意义来说,系统和信号都可以看作是序列。
但是,系统是加工信号的机构,这点与信号是不同的。
人们研究系统还要设计系统,利用系统加工信号、服务人类,系统还需要其它方法进一步描述。
描述系统的方法还有符号、单位脉冲响应、差分方程和图形。
电路系统的稳定性是电路系统的一个重要问题,稳定是控制系统提出的基本要求,也保证电路工作的基本条件;不稳定系统不具备调节能力,也不能正常工作,稳定性是系统自身性之一,系统是否稳定与激励信号的情况无关。
对于线性系统来说可以用几点分布来判断,也可以用劳斯稳定性判据分析。
对于非线性系统的分析则比较复杂,劳斯稳定性判据和奈奎斯特稳定性判据受到一定的局限性。
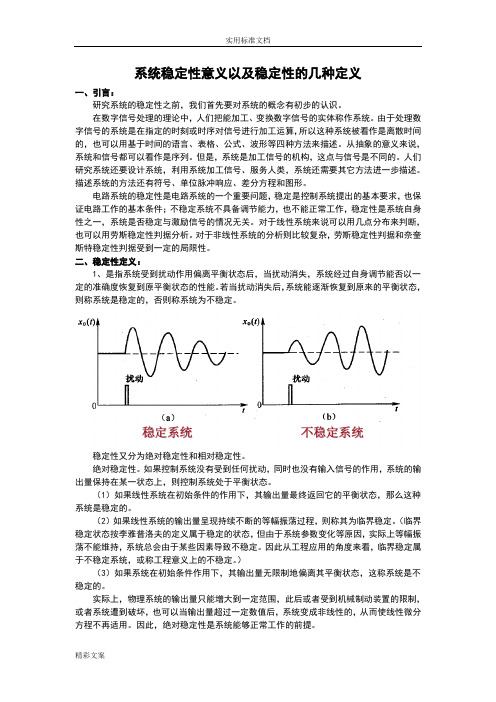
二、稳定性定义:1、是指系统受到扰动作用偏离平衡状态后,当扰动消失,系统经过自身调节能否以一定的准确度恢复到原平衡状态的性能。
若当扰动消失后,系统能逐渐恢复到原来的平衡状态,则称系统是稳定的,否则称系统为不稳定。
稳定性又分为绝对稳定性和相对稳定性。
绝对稳定性。
如果控制系统没有受到任何扰动,同时也没有输入信号的作用,系统的输出量保持在某一状态上,则控制系统处于平衡状态。
(1)如果线性系统在初始条件的作用下,其输出量最终返回它的平衡状态,那么这种系统是稳定的。
(2)如果线性系统的输出量呈现持续不断的等幅振荡过程,则称其为临界稳定。
(临界稳定状态按李雅普洛夫的定义属于稳定的状态,但由于系统参数变化等原因,实际上等幅振荡不能维持,系统总会由于某些因素导致不稳定。
因此从工程应用的角度来看,临界稳定属于不稳定系统,或称工程意义上的不稳定。
实验四三阶系统的瞬态响应及稳定性分析

实验四三阶系统的瞬态响应及稳定性分析引言:实际工程中经常遇到三阶系统,对三阶系统的瞬态响应及稳定性进行分析能够帮助我们更好地设计和优化控制系统。
本实验旨在通过实验,研究三阶系统的瞬态响应及稳定性,并加深对其理论知识的理解和掌握。
实验一:三阶系统的瞬态响应1.实验目的:通过三阶系统的瞬态响应实验,观察系统的输出响应情况,了解系统的动态特性。
2.实验仪器:示波器、波形发生器、三阶系统实验箱3.实验原理:三阶系统的瞬态响应是指系统在初始状态发生突变时,输出的响应情况。
三阶系统的瞬态响应主要涉及到系统阶跃响应、系统脉冲响应。
4.实验步骤:a.将波形发生器的正弦波信号输入三阶系统实验箱。
b.设置示波器的观测通道,将示波器的探头连接到三阶系统实验箱的输出端口。
c.调节波形发生器的频率和幅度,观察示波器上得到的输出响应波形。
5.数据处理:a.根据示波器上输出的响应波形,可以观察到系统的超调量、调整时间等指标,根据公式可以计算得到这些指标的具体数值。
b.将实验得到的数据记录下来,进行分析和比较。
1.实验目的:通过三阶系统的稳定性分析实验,了解系统的稳定性及稳定性判据。
2.实验仪器:示波器、三阶系统实验箱3.实验原理:三阶系统的稳定性是指系统在初始状态发生突变或受到外部扰动时,系统是否能够回到稳定状态。
常见的稳定性分析方法包括极点判据、频率响应法等。
4.实验步骤:a.将示波器的探头连接到三阶系统实验箱的输出端口。
b.调节系统的输入信号,观察示波器上得到的系统输出响应波形。
c.根据观察到的输出波形,分析系统的稳定性。
5.数据处理:a.根据实验得到的数据和观察到的波形,可以从输入输出关系中提取出系统的稳定性信息,比如振荡频率、稳定的输出值等。
b.根据提取出的信息,判断系统的稳定性。
实验三:实验结果和分析1.通过实验一,我们可以观察到三阶系统的瞬态响应,并根据输出波形,计算得到系统的超调量、调整时间等指标。
通过对比不同输入频率和幅度下的响应波形,可以分析系统的动态特性。
自动控制原理实验一 典型系统的时域响应和稳定性分析

实验一典型系统的时域响应和稳定性分析一、实验目的1.研究二阶系统的特征参量(ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉Routh判据,用Routh判据对三阶系统进行稳定性分析。
二、实验设备PC机一台,TD-ACC+教学实验系统一套。
三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图1-1所示。
图1-1(2)图1-2(3) 理论分析系统开环传递函数为:G(s)=K1T0⁄s(T1s+1)开环增益:K= K1T0⁄先算出临界阻尼、欠阻尼、过阻尼时电阻R的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中由图1-2,可以确地1-1中的参数。
T0= 1s , T1= 0.1s ,K1= 200R , K= 200R系统闭环传递函数为:W(s)=5Ks2+5s+5K其中自然振荡角频率:?n ω= 10√10R;阻尼比:?ζ= √10R402.典型的三阶系统稳定性分析(1) 结构框图:如图1-3所示。
图1-3(2) 模拟电路图:如图1-4所示。
图1-4(3) 理论分析系统的开环传函为: G(s)H(s)=20K s 3+12s 2+20s系统的特征方程为:1()()0G s H s += : s 3+12s 2+20s+20K=0 (4) 实验内容实验前由Routh 判断得Routh 行列式为:S 3 1 20 S 2 12 20K S 1 20-5/3*K 0 S 0 20K为了保证系统稳定,第一列各值应为正数,因此可以确定系统稳定 K 值的范围 : 0<K <12 R >41.7k系统临界稳定K: K=12 R =41.7k 系统不稳定K 值的范围: K >12 R <41.7k四、实验步骤1)将信号源单元的“ST ”端插针与“S ”端插针用“短路块”短接。
控制系统的瞬态响应及其稳定性分析

控制系统的瞬态响应及其稳定性分析控制系统的瞬态响应及其稳定性分析是控制理论的重要内容之一、瞬态响应描述了一个控制系统在输入信号改变时的响应情况,稳定性分析则是评估系统响应的稳定性和可靠性。
下面将从瞬态响应和稳定性分析两个方面进行探讨。
一、瞬态响应分析瞬态响应指的是一个控制系统在输入信号发生改变时,系统在一定时间范围内达到稳态的过程。
常见的瞬态响应包括过渡过程和超调量等指标。
1.过渡过程:在一个控制系统中,当输入信号发生改变时,系统输出信号不会立即达到稳定状态,而是经历一个从初值到最终稳定状态的过渡过程。
过渡过程的主要指标有上升时间、峰值时间和调整时间。
-上升时间(Tr):指的是信号从初始值开始,达到其最终稳定值之间的时间间隔。
上升时间越短,系统的响应越快速。
-峰值时间(Tp):指的是信号首次超过最终稳定值所需的时间。
峰值时间越短,响应越快。
-调整时间(Ts):指的是信号从初始值到最终值之间的时间。
调整时间越短,系统的响应越快。
2.超调量:超调量是指在过渡过程中系统输出信号超过最终稳定状态的幅度。
超调量的大小可以直接反映系统的稳定性。
一般来说,超调量越小,系统的稳定性越好。
瞬态响应分析是评估系统性能的重要工具。
通过对瞬态响应的分析,可以了解系统的响应速度、稳定性和鲁棒性,并对系统进行优化和改进。
稳定性分析是评估控制系统稳态响应和稳定性的重要方法。
一个稳定的控制系统应该满足输入信号的变化不会引起系统输出信号的不稳定或震荡。
常见的稳定性分析方法有频域分析法和时域分析法。
1.频域分析法:频域分析主要利用系统的频率特性来分析系统的稳定性。
通过绘制系统的频率响应曲线,可以得到系统的增益和相位特性。
稳定性条件为系统的增益在截止频率处不为负值,即系统的增益曲线应该位于0dB线以上。
2.时域分析法:时域分析主要关注系统的时间响应曲线。
稳定性条件为系统在有限时间内达到并保持在稳定状态。
稳定性分析是评估控制系统性能的关键环节,它不仅可以帮助设计者理解系统的稳定性和鲁棒性,还可以为系统的优化和改进提供指导。
系统响应及系统稳定性实验报告

系统响应及系统稳定性实验报告系统响应及系统稳定性实验报告引言:系统响应和系统稳定性是控制论中重要的概念。
在工程和科学领域中,我们经常需要对系统的响应和稳定性进行评估和分析,以便设计和优化控制系统。
本实验旨在通过实际测量和数据分析,探讨系统响应和系统稳定性的相关概念。
一、实验背景控制系统是由输入、输出和系统本身组成的。
系统响应是指系统对输入信号的反应。
而系统稳定性则是指系统在长时间运行中是否趋于稳定状态。
了解系统的响应和稳定性对于设计和优化控制系统至关重要。
二、实验目的1. 了解系统响应和系统稳定性的概念和定义。
2. 掌握测量系统响应和稳定性的方法和技巧。
3. 分析实验数据,评估系统的响应和稳定性。
三、实验装置和方法本实验使用了一个简单的电路系统作为示例。
实验装置包括一个信号发生器、一个电路板和一个示波器。
实验步骤如下:1. 将信号发生器连接到电路板的输入端,设置合适的频率和振幅。
2. 将示波器连接到电路板的输出端,用于测量输出信号。
3. 通过改变信号发生器的输入信号,观察并记录系统的响应。
四、实验结果与数据分析在实验中,我们通过改变信号发生器的输入信号频率和振幅,记录了系统的输出信号。
根据实验数据,我们可以绘制出系统的频率响应曲线和幅频特性曲线。
1. 频率响应曲线频率响应曲线是描述系统对不同频率输入信号的响应的曲线。
通过绘制频率响应曲线,我们可以观察到系统对于不同频率信号的增益和相位变化。
从实验数据中绘制的频率响应曲线中,我们可以观察到系统在低频时具有较高的增益,而在高频时增益逐渐降低。
2. 幅频特性曲线幅频特性曲线是描述系统对不同幅度输入信号的响应的曲线。
通过绘制幅频特性曲线,我们可以观察到系统对于不同幅度信号的增益变化。
从实验数据中绘制的幅频特性曲线中,我们可以观察到系统在低幅度信号时具有较高的增益,而在高幅度信号时增益逐渐饱和。
五、系统稳定性分析系统稳定性是指系统在长时间运行中是否趋于稳定状态。
实验一-系统响应及系统稳定性实验报告

实验一-系统响应及系统稳定性实验报告
一、实验目的
设计一个生态缸,观察这一人工生态系统的稳定性
二、实验原理
在有限的空间内,依据生态系统原理将生态系统具有的基本成分进行组织,构建一个人工微生态系统.
三、实验材料
(1)器材:一个长20cm,宽、高10cm的生态缸;
一块长10cm宽5cm的硬质棉花;
保鲜膜和透明胶布
(2)生物:两条小金鱼、两颗小青菜、一株水草、一个仙人掌一抔菜地土壤和鱼缸里的水
四、
(1)将土堆在缸的一侧成一个长方形,青菜、仙人掌植入其上,水草
植入其下;将棉花放在土壤一侧,防止水变浑浊.
(2)取鱼缸内的水,注入生态缸,直至高5cm;
(3)放入金鱼
(4)于1月13日,用保鲜膜和透明胶布在教室封缸,开始观察1月13日晴金鱼很有活力青菜未有变化
1月14日晴金鱼很有活力青菜未有变化
1月15日阴金鱼游动频率下降青菜微微泛黄
1月16日阴周六未观察
1月17日雨周日未观察
1月18日阴金鱼表面开始有白色物质脱落类似蜕皮
可能发炎青菜已有部分变黄
1月19日晴金鱼白色物质脱落严重青菜泛黄面积增大
1月20日晴金鱼、青菜全员生还解封
五实验结论
恰当的组成成分,可以使生态系统具有一定的稳定性,维持自身物质循环和能量流动
六注意事项
(1)保持水质较为清澈,不能太过浑浊
(2)生态缸要放置于通风,光线良好的地方
(3)不能暴晒
(4)缸内生物并非越多越好,要根据缸的大小,和缸内植物决定。
中南大学典型系统的时域响应和稳定性分析实验报告

中南大学典型系统的时域响应和稳定性分析实验报告实验介绍:本实验以中南大学典型系统为研究对象,通过构建数学模型和实际建模结果,分析系统的时域响应和稳定性,以及初步探讨系统的性能和优化方法。
实验步骤:1、对中南大学典型系统进行数学建模,并得到系统的传递函数。
2、通过Matlab对系统的传递函数进行分析,得到系统的时域响应。
3、分析系统特征方程的根,判断系统的稳定性。
4、探讨系统的性能指标,并初步探讨系统的优化方法。
实验结果:1、数学模型及传递函数:根据中南大学典型系统的构成,我们可以得到其传递函数为:$$G(s) = \frac{Y(s)}{X(s)}=\frac{K}{s(T_1s+1)(T_2s+1)}$$2、时域响应分析:阶跃响应脉冲响应可以看出,在系统输入为阶跃信号时,系统的响应随着时间的增加逐渐趋于稳定;在系统输入为脉冲信号时,系统的响应在一定时间范围内会有一个稳定的振荡。
3、稳定性分析:我们根据系统的特征方程$$1+G(s)=0$$得到特征方程为:$$s^3+T_1T_2s^2+(T_1+T_2)s+K=0$$我们通过Matlab计算特征方程的根,得到系统的特征根分别为:$-0.0327\pm0.6480j$和$-2.4341$。
根据根的位置,我们可以判断系统的稳定性。
由于系统的根都在左半平面,因此系统是稳定的。
4、性能指标和优化方法:本实验中,我们主要关注系统的稳定性和响应速度等性能指标。
在实际应用中,我们可以通过调整系统控制参数,如增益$K$和时间常数$T_1$和$T_2$等,来优化系统的性能。
结论:本实验通过对中南大学典型系统进行数学建模和实际响应分析,得到了系统的传递函数、阶跃响应和脉冲响应等数学模型,并根据特征方程的根判断了系统的稳定性。
在探讨系统性能指标和优化方法的基础上,我们可以进一步探究系统的优化方案,并为实际控制应用提供参考。
数字信号处理 实验一 系统响应与系统稳定性
Experiment One the response and stability of systems1. Aims(1) Knowing how to compute the response of a system to an input.(2) Having a level of solid understanding of characterization in time-domain of systems.(3) To observe, verify and analyze the stability of systems.2. Principle and method:Discrete-Time LTI systems can be represented as a linear const difference equation or the impulse response in time domain and as a transform function in frequency-domain. The response of the system to an arbitrary input can be computed knowing the linear const difference equation or the impulse response.In this experiment, we compute the response of the system to an arbitrary input by two ways.1) Output computation using MATLAB, knowing the linear const difference equation.2) Output computation using linear convolution, knowing the impulse response of the systems.Signal processing toolbox in MATLAB provides us a convenient and efficient function to reach our objectives.Characterization in time-domain of systems refers to the linear, shift-invariant, causal and stable of a system. We focus on the stability of systems, including the steady and transient response.We defined a discrete-time system to be stable if and only if for every bounded input, the output is also bounded, or, its impulse response sequence is absolutely summable. The stability of a discrete-time system depends on the coefficients of its difference equation.It is impossible to examine the system whether the output is bound or not when all of whose input is bound ,or examine the response of the system satisfy the absolutely summable when examining whether the system is stable or not in practice .One of the feasible way is to add the unit step sequence to the input end, so we can decide the system is stable if its output tends to a constant (including zero).The steady state output is the output as n tends to infinity .If it is stable , the output at the initial period of time is defined to transient effect ,with n increasing ,the magnitude tends to be stable ,to reach the stable output .Pay attention that the initial state of the systems are supposed to be zero in thefollowing experiment .3. The contents and steps(1) Given a difference equation of low-pass filter following:)1(9.0)1(05.0)(05.0)(-+-+=n y n x n x n ythe input signal:)()(81n R n x = )()(2n u n x =① Solve the response of the system respectively when )()(81n R n x = and )()(2n u n x = ,and draw up their waveform.② Solve the unit impulse response of the system, and draw up their waveform .(2) Given the unit impulse response of the system following,)()(101n R n h =)3()2(5.2)1(5.2)()(2-+-+-+=n n n n n h δδδδSolve the output response of the system h1(n) and h2(n) by linear convolution respectively when the input )()(81n R n x = ,and draw up the waveform.(3) Given the difference equation of a resonator as following00() 1.8237(1)0.9801(2)()(2)y n y n y n b x n b x n =---+--Let 49.100/10=b , the frequency of the resonator is 0.4 rad.① Examine whether the system is stable or not by experiment. When the input is u(n), draw up the waveform of the system output.② Given the input signal is)4.0sin()014.0sin()(n n n x +=Solve the output response of the system, and draw up its waveform.4. Question for review(1) If the inputs are infinite long sequence, but the unit impulse response of systems are finite long sequence, can the response of the systems be solved by linear convolution? How?(2) If the signal passing a low-pass filter, filtrating the components of the high frequency, what will the change of the Time-Domain signal .Please analyze and illustrate by the results of the former experiment.5. The requirement of the report(1) Sketch the method of solving the response of systems in Time-Domain;(2) Sketch the method of justifying the stability of systems by experiment , analyze the stable output waveform of the above third experiment ;(3) Analyze and explain the results of each experiment simply ;(4) Answer the question for review simply;(5) Print the list of the procedures and each signal required.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一及课堂作业实验一:系统响应及系统稳定性一、实验原理与方法1、在时域求系统响应的方法有两种:第一种是通过解差分方程求得系统输出;第二种是已知系统的单位脉冲响应,通过求输入信号和系统单位脉冲响应的线性卷积求得系统输出。
2、检验系统的稳定性,其方法是在输入端加入单位阶跃序列,观察输出波形,如果波形稳定在一个常数值(包括零)上,系统稳定,否则不稳定。
3、系统的频域特性包括传输函数/特性(系统单位脉冲响应的傅里叶变换——幅频、相频)、系统函数/特性(系统单位脉冲响应的Z 变换)、零极点分布等。
分析系统的频域特性是为了知晓系统对不同频率的输入信号所产生的响应结果,因为零、极点分布对系统的频域特性有影响,通过控制系统函数的零、极点分布就可以设计出不同特性需求的系统。
二、实验内容1、编制程序,包括产生输入信号、单位脉冲响应序列的子程序,用filter 函数或conv 函数求解系统输出响应的主程序。
程序中要有绘制信号波形的功能。
2、给定一个低通滤波器的差分方程为)1(9.0)1(05.0)(05.0)(-+-+=n y n x n x n y 输入信号)()(),()(281n u n x n R n x ==(1)分别求出)(8)(1n R n x =和)()(2n u n x =)的系统响应,并画出其波形。
(2)求出系统的单位脉冲响应,画出其波形。
程序见附录1.1、实验结果见图1.1。
3、给定系统的单位脉冲响应为)()(101n R n h =)3()2(5.2)1(5.2)()(2-+-+-+=n n n n n h δδδδ用线性卷积法求)(8)(1n R n x =)分别对系统)(1n h 和)(2n h )的输出响应并画出波形。
程序见附录1.2、实验结果见图1.2。
4、给定一谐振器的差分方程为)2()()2(9801.0)1(8237.1)(00--+---=n x b n x b n y n y n y 令49.10010=b ,谐振器的谐振频率为rad 4.0。
(1)用实验方法检查系统是否稳定,输入信号为)u时,画出系统输出波(n形。
(2)给定输入信号为(n)=sin(x+nn4.0).0sin()014求出系统的输出响应,并画出其波形。
程序见附录1.3、实验结果见图1.3。
三、实验结果和分析、讨论及结论1、实验结果:图1.1 依据差分方程求取系统脉冲响应和输出响应实验分析、讨论及结论:(a)中25个点数和程序所写一致。
Filter函数实现线性常系数差分方程的递推求解,调用格式如下:Y=[filter(B,A,x)] ***计算系统对输入信号x 的零状态响应输出信号向量Y,B、A是差分方程的系数向量。
即B=[a1,a2……am] A=[b1,b2……bn]2、实验结果:图1.2 线性卷积求取二个不同系统输出响应实验分析、讨论及结论:(d)(f)单位脉冲响应点数与程序要求一致;(e)(g)卷积点数满足M+N-1的要求,图形也满足要求。
Conv函数用于计算两个有限长序列的卷积;C=conv(A,B)计算两个有限长序列向量A和B的卷积3、实验结果:图1.3 依据差分方程求取系统脉冲响应和输出响应实验分析、讨论及结论:在系统的输入端加入单位阶跃序列,如果系统的输出趋近一个常数(包括零),就可以断定系统是稳定的,(h )中的输出显然趋近于零,所以系统是稳定的。
在(i )中,谐振器具有对某个频率进行谐振的性质,本实验中的谐振器的谐振频率是0.4 rad,因此稳定波形为sin(0.4n)。
四、思考题1、如果输入信号为无限长序列,系统的单位脉冲响应是有限长序列,可否用线性卷积法求系统的响应? 如何求?答:如果输入信号为无限长序列,系统的单位脉冲响应是有限长序列,可用分段线性卷积法求系统的响应。
具体步骤是①对输入信号序列分段;②求单位脉冲响应h (n )与各段的卷积;③将各段卷积结果相加。
具体实现方法有第三章P91介绍的重叠相加法和重叠保留法。
2、如果信号经过低通滤波器,把信号的高频分量滤掉,时域信号会有何变化,用前面第一个实验结果进行分析说明。
答:如果信号经过低通滤波器,则信号的高频分量将被过滤掉,时域信号的剧烈变化变的平滑,在有阶跃处附近产生过渡带。
由实验内容1的结果图可见,经过系统低通滤波使得输入信号)()()(81n R n x n =、δ和)()(2n u n x =的阶跃变化变的缓慢上升与下降。
五、总结与心得体会实验总结即在实验原理中说明的两点:1、在时域求系统响应的方法有两种:第一种是通过解差分方程求得系统输出;第二种是已知系统的单位脉冲响应,通过求输入信号和系统单位脉冲响应的线性卷积求得系统输出。
2、检验系统的稳定性,其方法是在输入端加入单位阶跃序列,观察输出波形,如果波形稳定在一个常数值(包括零)上,系统稳定,否则不稳定。
实验的心得体会见下:在此次试验中,通过课堂所留的三个例子,温习了关于MATLAB软件的操作及应用,基本使用方法和它的运行环境。
又进一步地通过实验加深了对MATLAB 软件的了解,体会到了MATLAB具有完备的图形处理功能,实现计算结果和编程的可视化等功能。
通过做实验的过程以及实验分析的结果,了解并学会了filter 函数和conv函数的基本用法,前者可计算知道输入信号的前提下求解输出响应的序列,后者则可以通过输入信号和系统的单位脉冲响应的线性卷积,求出系统的响应。
当然,在实验过程中,也遇到了一些问题,比如课堂作业的第三个问题里面,由于程序里面缺少“;”,导致少了一个结果图,通过检查并修改程序,解决了问题。
总得来说,实验还是比较圆满的。
通过这次的实验。
极大地提升了自己对于程序编辑的熟练度,增加了对于书本里面知识点的应用,更深一层的加深了对MATLAB软件的使用。
这对自己以后的实验积累了丰富的经验。
六、附件:MATLAB原程序清单1.1调用conv函数计算卷积close all;clear allA=[1,-0.9];B=[0.05,0.05]; %系统差分方程系数向量B和Ax1n=[1 1 1 1 1 1 1 1 zeros(1,40)]; %产生信号x1(n)=R8(n),用zeros用来加点的个数x2n=ones(1,60); %产生信号x2(n)=u(n)hn=impz(B,A,40); %求系统单位脉冲响应h(n)subplot(3,1,1);stem(hn); %调用函数stem绘图title('(a) 系统单位脉冲响应h(n)');y1n=filter(B,A,x1n); %求系统对x1(n)的响应y1(n)subplot(3,1,2);stem(y1n);title('(b) 系统对R8(n)的响应y1(n)');y2n=filter(B,A,x2n); %求系统对x2(n)的响应y2(n)subplot(3,1,3);stem(y2n);title('(c) 系统对u(n)的响应y2(n)');1.2利用线性卷积求取二个不同系统输出响应close all;clear allx1n=[ones(1,8)]; %产生信号x1(n)=R8(n)h1n=[ones(1,10) zeros(1,10)];h2n=[1 2.5 2.5 1 zeros(1,10)];y21n=conv(h1n,x1n); y22n=conv(h2n,x1n); subplot(2,2,1);stem(h1n);title('(d) 系统单位脉冲响应h1(n)'); subplot(2,2,3);stem(y21n);title('(e) h1(n)与R8(n)的卷积y21(n)'); subplot(2,2,2);stem(h2n);title('(f) 系统单位脉冲响应h2(n)'); subplot(2,2,4);stem(y22n);title('(g) h2(n)与R8(n)的卷积y22(n)');1.3 调用filter 解差分方程求取系统单位脉冲响应和输出响应close all;clear allun=ones(1,300); %产生信号u(n) n=0:299;xsin=sin(0.014*n)+sin(0.4*n); %产生正弦信号A=[1,-1.8237,0.9801];B=[1/100.49,0,-1/100.49]; %系统差分方程系数向量B 和A y1n=filter(B,A,un); %谐振器对u(n)的响应y31(n) y2n=filter(B,A,xsin); %谐振器对u(n)的响应y31(n) subplot(2,1,1);stem(y1n);title('(h) 谐振器对u(n)的响应y31(n)'); subplot(2,1,2);stem(y2n);title('(i) 谐振器对正弦信号的响应y32(n)');课堂作业1、绘出∑-=-=11)()(N N m m n n x δ的频谱。
解:实验程序:实验结果:1.1 n=200;stept=2*pi/n;w=stept:stept:2*pi;y=sin(2.5*w)./sin(0.5*w); plot(w, y,w,zeros(size(w))); axis([stept 2*pi -2 6]);ylabel('y=sin(2.5*pi)/sin(0.5*pi)'); xlabel('w=0~2*pi'); grid on;1.2 n=200;stept=2*pi/n;w=stept:stept:2*pi;y=sin(2.5*w)./sin(0.5*w);plot(w,abs(y),w,zeros(size(w))); axis([stept 2*pi 0 6]);ylabel('y=sin(2.5*pi)/sin(0.5*pi)'); xlabel('w=0~2*pi'); grid on;图1.1 图1.22、输入⎭⎬⎫⎩⎨⎧↑=5,4,3,2,1)(n x ,单位脉冲响应⎭⎬⎫⎩⎨⎧↑=2,4,6,3,2,6)(n h ,求输出序列, 解:实验程序:N=5; M=6; L=N+M-1; x=[1,2,3,4,5]; h=[6,2,3,6,4,2]; y=conv(x,h); nx=0:N-1; nh=0:M-1; ny=0:L-1;subplot(2 3 1);stem(nx,x,'.k'); xlabel('n');ylabel('x(n)');grid on; subplot(2 3 2); stem(nh,h,'.k'); xlabel('n');ylabel('h(n)');grid on; subplot(2 3 3);stem(ny,y,'.k'); xlabel('n');ylabel('y(n)');grid on;实验结果:4,5.0,8.0πα===r p解:实验程序:实验结果:p=0.8;r=0.85;alpha=pi/4;N=25;b1=[1,1];a1=[1 -p];a=(1-p)/2;b1=b1*a; b2=[1,-1];a2=[1 -p];b=(1+p)/2;b2=b2*b; b3=[1 0 -1];a3=[1 -2*r*cos(alpha) r*r]; c1=exp(j*2*alpha);c=abs(1-c1)/((1-r)*abs(1-r*c1)); b3=b3/c;h1=impz(b1,a1,N);subplot(331);stem(h1,'.k');subplot(332);zplane(b1,a1) [H1,P]=freqz(b1,a1,256,'whole',1); subplot(333);plot(P,abs(H1));grid on;h2=impz(b2,a2,N);subplot(334);stem(h2,'.k')hold on;plot(zeros(size(h2)));subplot(335);zplane(b2,a2) [H2,P]=freqz(b2,a2,256,'whole',1); subplot(336);plot(P,abs(H2));grid on;h3=impz(b3,a3,N);subplot(337);stem(h3,'.k')hold on;plot(zeros(size(h3)));subplot(338);zplane(b3,a3) [H3,P]=freqz(b3,a3,256,'whole',1); subplot(339);plot(P,abs(H3));grid on;欢迎您的下载,资料仅供参精品考感谢下载载。