2021年单轴电机运动控制实验报告范文
电机控制实验报告

电机控制实验报告电机控制实验报告引言:电机是现代工业中常见的一种动力装置,广泛应用于各个领域。
为了使电机能够高效运行,需要进行电机控制。
本实验旨在通过对电机控制的研究,探讨电机的特性和控制方法。
一、电机特性研究1.1 电机的基本原理电机是通过电流在导体中产生的磁场与磁场之间的相互作用来实现能量转换的装置。
电流通过线圈时,会在线圈周围产生磁场,这个磁场与外部磁场相互作用,使得电机产生转动力矩。
1.2 电机的运行特性电机的运行特性包括转速、转矩、效率等。
转速是指电机每分钟旋转的圈数,转矩是指电机输出的力矩大小,效率是指电机输出功率与输入功率之比。
1.3 电机的启动和制动过程电机的启动是指电机从静止状态开始转动的过程,制动是指电机停止转动的过程。
在实际应用中,启动和制动过程对电机的寿命和效率都有一定的影响,因此需要进行控制。
二、电机控制方法2.1 直流电机控制直流电机是一种常见的电机类型,其控制方法较为简单。
通过调节电流大小和方向,可以实现直流电机的转速和转矩控制。
在实验中,我们通过改变输入电压和电阻来控制直流电机的转速和转矩。
2.2 交流电机控制交流电机是另一种常见的电机类型,其控制方法相对复杂。
交流电机的控制主要包括电压调节、频率调节和相位调节等。
在实验中,我们通过改变电压和频率来控制交流电机的转速和转矩。
2.3 闭环控制和开环控制电机控制可以分为闭环控制和开环控制。
闭环控制是通过反馈信号来调节控制系统的输出,以达到期望的效果。
开环控制则是直接根据输入信号来控制系统的输出。
在实验中,我们可以通过反馈电机的转速信号来实现闭环控制,提高控制的精度和稳定性。
三、实验过程与结果在实验中,我们选取了一台直流电机和一台交流电机进行控制实验。
首先,我们通过调节电压和电阻来控制直流电机的转速和转矩,观察并记录了不同参数下电机的运行特性。
接着,我们通过改变电压和频率来控制交流电机的转速和转矩,并对实验结果进行了分析和总结。
单轴电机实验报告
一、实验目的1. 熟悉单轴电机的基本结构和工作原理;2. 掌握单轴电机的驱动和控制方法;3. 了解单轴电机在不同负载下的运行特性;4. 学习电机参数的测试和计算方法。
二、实验原理单轴电机是一种将电能转换为机械能的装置,主要由转子、定子、电刷、电枢等部分组成。
当电流通过电枢时,在电枢和磁场之间产生电磁力,从而使转子转动。
本实验主要研究直流电机和步进电机的驱动与控制。
三、实验设备与仪器1. 直流电机:型号为DC12V,功率为12W;2. 步进电机:型号为NEMA17,步距角为1.8°;3. 电机驱动器:直流电机驱动器、步进电机驱动器;4. 可调电源:直流电源;5. 电流表、电压表、转速表、转矩表;6. 电脑、数据采集卡。
四、实验内容及步骤1. 直流电机实验(1)连接电路:将直流电机、驱动器、可调电源、电流表、电压表、转速表、转矩表等连接成电路。
(2)测试电机参数:在空载状态下,记录电机的电压、电流、转速、转矩等参数。
(3)负载实验:在电机轴上加载不同重量的砝码,记录相应的电压、电流、转速、转矩等参数。
(4)数据分析:分析电机在不同负载下的运行特性,计算电机的效率、功率因数等指标。
2. 步进电机实验(1)连接电路:将步进电机、驱动器、可调电源、电脑、数据采集卡等连接成电路。
(2)测试步进电机参数:在空载状态下,记录电机的电压、电流、转速、转矩等参数。
(3)定位实验:通过编程控制步进电机,使其在指定位置停止,记录步进电机的定位精度。
(4)加减速实验:通过编程控制步进电机,使其在给定时间内完成加减速运动,记录电机的加减速性能。
(5)数据分析:分析步进电机在不同负载、定位精度、加减速性能等方面的表现。
五、实验结果及分析1. 直流电机实验结果及分析通过实验,得到了直流电机在不同负载下的电压、电流、转速、转矩等参数。
分析结果表明,随着负载的增加,电机的电压、电流、转矩逐渐增大,而转速逐渐减小。
这说明电机在负载较大时,需要更大的电压和电流来维持正常运转。
数控机床实验报告——单轴电机运动控制
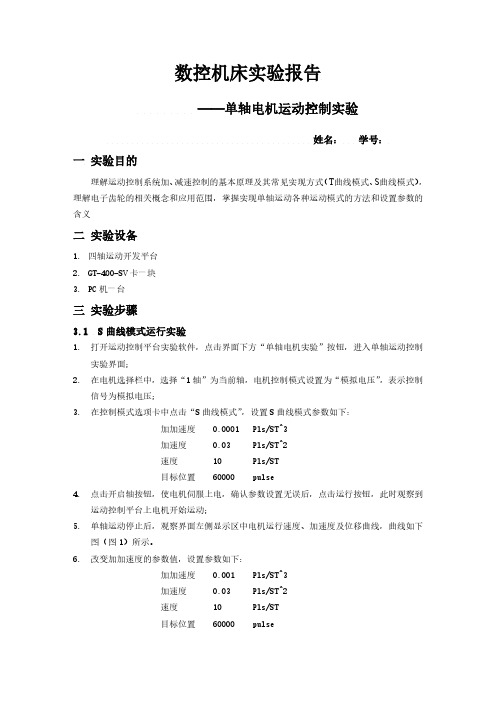
数控机床实验报告——单轴电机运动控制实验姓名:学号:一实验目的理解运动控制系统加、减速控制的基本原理及其常见实现方式(T曲线模式、S曲线模式),理解电子齿轮的相关概念和应用范围,掌握实现单轴运动各种运动模式的方法和设置参数的含义二实验设备1.四轴运动开发平台2.GT-400-SV卡一块3.PC机一台三实验步骤3.1 S曲线模式运行实验1. 打开运动控制平台实验软件,点击界面下方“单轴电机实验”按钮,进入单轴运动控制实验界面;2. 在电机选择栏中,选择“1轴”为当前轴,电机控制模式设置为“模拟电压”,表示控制信号为模拟电压;3. 在控制模式选项卡中点击“S曲线模式”,设置S曲线模式参数如下:加加速度 0.0001 Pls/ST^3加速度 0.03 Pls/ST^2速度 10 Pls/ST目标位置 60000 pulse4. 点击开启轴按钮,使电机伺服上电,确认参数设置无误后,点击运行按钮,此时观察到运动控制平台上电机开始运动;5. 单轴运动停止后,观察界面左侧显示区中电机运行速度、加速度及位移曲线,曲线如下图(图1)所示。
6. 改变加加速度的参数值,设置参数如下:加加速度 0.001 Pls/ST^3加速度 0.03 Pls/ST^2速度 10 Pls/ST目标位置 60000 pulse7.开启轴,运行电机,界面左侧显示区中电机运行速度、加速度及位移曲线如下图(图2)所示。
8.改变加速度的参数值,设置参数如下:加加速度 0.0001 Pls/ST^3加速度 0.2 Pls/ST^2速度 10 Pls/ST目标位置 60000 pulse9. 开启轴,运行电机,界面左侧显示区中电机运行速度、加速度及位移曲线如下图(图3)所示。
图1 S曲线模式(加加速度0.0001 加速度0.03)10. 比较并分析不同参数设置对S 曲线运动模式的影响。
① 改变加加速度,比较图1与图2,速度-时间曲线中,当加加速度越大时,加速和减速的时间越短,加速度-时间曲线的峰值越大,速度突变越明显,越容易发生刚性冲击。
单电机驱动实验报告(3篇)
第1篇一、实验目的本次实验旨在通过实际操作和数据分析,掌握单电机驱动的基本原理,了解电机驱动电路的设计方法,熟悉电机驱动实验的操作流程,并学会通过实验验证电机驱动系统的性能。
二、实验原理单电机驱动系统主要由电机、驱动电路、控制器和电源等组成。
实验中,我们采用直流电机作为驱动电机,通过PWM(脉冲宽度调制)信号控制电机的转速和转向。
驱动电路采用H桥电路,通过控制H桥电路中晶体管的导通与截止,实现对电机的正反转和调速。
三、实验设备1. 直流电机:型号为NMB 2406KL-04W-B36,额定电流0.14A。
2. 驱动电路:H桥电路,由四个晶体管组成。
3. 控制器:采用Arduino Uno开发板,通过编写程序控制PWM信号输出。
4. 电源:可调稳压电源,输出电压范围0-24V。
5. 测量仪器:万用表、示波器、光电反射式转速表等。
四、实验步骤1. 搭建实验电路:将直流电机、H桥电路、Arduino Uno开发板和电源连接起来,确保电路连接正确。
2. 编写程序:使用Arduino IDE编写程序,控制PWM信号的输出,实现对电机的正反转和调速。
3. 调试程序:通过调整程序中的参数,观察电机运行情况,确保程序运行稳定。
4. 测试电机性能:使用光电反射式转速表测量电机在不同PWM占空比下的转速,记录数据。
5. 分析实验结果:根据实验数据,分析电机驱动系统的性能,如转速稳定性、调速范围等。
五、实验结果与分析1. 转速稳定性:通过调整PWM占空比,观察电机转速的变化。
实验结果表明,电机转速随PWM占空比的增大而增大,且在稳定运行时,转速波动较小,说明电机驱动系统的转速稳定性较好。
2. 调速范围:实验中,我们测试了电机在不同PWM占空比下的转速,结果表明,电机驱动系统的调速范围较宽,可满足实际应用需求。
3. 转向控制:通过改变PWM信号的极性,实现电机的正反转,实验结果表明,电机转向控制准确,无抖动现象。
六、实验总结通过本次实验,我们掌握了单电机驱动的基本原理和实验操作流程,了解了电机驱动电路的设计方法。
电机试验报告范文
电机试验报告范文一、实验目的本次实验的主要目的是通过对电机进行试验,测量其各项性能指标,如额定功率、转速、效率等,并对电机的性能进行评估和分析。
二、实验仪器与材料1.电机试验台2.多用表3.功率计4.手动转速计5.规定负载6.电源三、实验原理1.电机的转速与电源频率之间的关系:电机的转速与电源的频率成正比,转速=K*f,其中K为比例常数。
2.电机的转速与负载之间的关系:电机的转速与负载成反比,转速和负载之间满足逆反比关系。
四、实验步骤1.首先将电机接入电源,注意正确连接电源正负极。
2.使用手动转速计测量电机的转速,并记录数据。
3.使用多用表测量电机的电流和电压。
4.根据测得的电流和电压计算电机的功率和效率。
5.使用规定负载对电机进行负载实验,并测量电机的转速和电流,计算功率和效率。
6.根据实测数据绘制转速-负载特性曲线,并进行分析和评估。
五、实验结果与分析1.额定功率:根据实测数据计算,得到电机的额定功率为XkW。
2. 额定转速:通过手动转速计测量得到电机的额定转速为Y rpm。
3.效率:根据实测数据计算,得到电机的额定效率为Z%。
4.转速-负载特性曲线:根据实测数据绘制转速-负载特性曲线,可以看出在负载增加的情况下,电机的转速呈现递减的趋势。
并根据曲线分析,得出电机的负载能力较强。
六、实验结论通过本次实验,我们成功地完成了对电机的试验与测量,并得到了电机的各项性能指标。
根据实测数据和转速-负载特性曲线的分析,可以认为该电机具有较高的额定功率和效率,负载能力较强。
但在实际运行中仍需注意电机的额定转速,以免超速运行造成损坏。
七、实验心得通过本次实验,我们对电机的性能测量有了更深入的了解。
同时,我们也学会了如何使用多种仪器进行测量和计算,并通过数据分析对电机的性能进行评估。
在实验过程中,我们也需要尽量减小误差,确保测量结果的准确性。
总的来说,本次实验收获颇多,为以后的实际应用提供了一定的基础。
电机与运动控制实验报告格式正式样本
文件编号:TP-AR-L2039Report The Progress In Work And Life, Including The Recent Work Situation, Practice, Experience And Feedback On Problems, And The Deployment Of The Next Stage Plan To Ensure The Effective Implementation Of The Plan.(示范文本)编制:_______________审核:_______________单位:_______________电机与运动控制实验报告格式正式样本电机与运动控制实验报告格式正式样本使用注意:该报告资料可用在工作生活中按规定定期或不定期汇报进度,汇报内容包括近一段的工作情况、做法、经验以及问题的反馈,下一段计划的部署,以保证计划有效地进行。
材料内容可根据实际情况作相应修改,请在使用时认真阅读。
实验名称:电流、转速调速调节器设计一、实验目的1、掌握双闭环直流调速系统的稳态参数计算、系统的稳定性分析 2、了解用MATLAB软件工具对系统的电流环和速度环作PI调节器设计 3、熟悉对系统进行仿真的步骤和方法二、实验过程 1、设计要求(1)静态指标:无静差(2)动态指标:电流超调量小于等于5%;空载启动到额定转速时的转速超调量小于等于10% 2、电流环设计(1)确定时间常数:经计算得电流环小时间常数之和为0.0037s (2)选择电流调节器结构:采用PI调节器(3)计算电流调节器参数:电流调节器超前时间常数为0.03s,ACR比例系数为1.013(4)校验近似条件:均满足近似条件(5)计算调节器电阻电容:按照计算得出的电阻电容参数,电流环可以达到的动态跟随性能指标为4.3%,小于5%,满足设计要求 3、转速环设计(1)确定时间常数:经计算得转速环小时间常数之和为0.0174s (2)选择转速调节器结构:采用PI调节器(3)计算转速调节器参数:ASR超前时间常数为0.087s,ASCR比例系数为11.7(4)校验近似条件:均满足近似条件工学院实验报告(5)计算调节器电阻电容(6)校核转速超调量:转速环可以达到的动态跟随性能指标为8.31%,小于10%,满足设计要求4、电流闭环控制系统仿真图1电流环仿真模型5、转速环仿真设计图2 转速环仿真模型6、不同PI参数下仿真图对比表1中序号1为以KT=0.25的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时无超调、但上升时间长;序号2为以KT=0.5的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时超调量小、上升时间较短,兼顾了稳定性和快速性;序号3为以KT=1的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时上升时间短、但超调大;序号4为开环时仿真结果图,可以看出系统将不会达到稳态。
电机与运动控制实验报告格式详细版
文件编号:GD/FS-5212(报告范本系列)电机与运动控制实验报告格式详细版The Short-Term Results Report By Individuals Or Institutions At Regular Or Irregular Times, Including Analysis, Synthesis, Innovation, Etc., Will Eventually Achieve Good Planning For TheFuture.编辑:_________________单位:_________________日期:_________________电机与运动控制实验报告格式详细版提示语:本报告文件适合使用于个人或机构组织在定时或不定时情况下进行的近期成果汇报,表达方式以叙述、说明为主,内容包含分析,综合,新意,重点等,最终实现对未来的良好规划。
文档所展示内容即为所得,可在下载完成后直接进行编辑。
实验名称:电流、转速调速调节器设计一、实验目的1、掌握双闭环直流调速系统的稳态参数计算、系统的稳定性分析2、了解用MATLAB软件工具对系统的电流环和速度环作PI调节器设计3、熟悉对系统进行仿真的步骤和方法二、实验过程1、设计要求(1)静态指标:无静差(2)动态指标:电流超调量小于等于5%;空载启动到额定转速时的转速超调量小于等于10%2、电流环设计(1)确定时间常数:经计算得电流环小时间常数之和为0.0037s (2)选择电流调节器结构:采用PI调节器(3)计算电流调节器参数:电流调节器超前时间常数为0.03s,ACR比例系数为1.013(4)校验近似条件:均满足近似条件(5)计算调节器电阻电容:按照计算得出的电阻电容参数,电流环可以达到的动态跟随性能指标为4.3%,小于5%,满足设计要求3、转速环设计(1)确定时间常数:经计算得转速环小时间常数之和为0.0174s (2)选择转速调节器结构:采用PI调节器(3)计算转速调节器参数:ASR超前时间常数为0.087s,ASCR比例系数为11.7(4)校验近似条件:均满足近似条件工学院实验报告(5)计算调节器电阻电容(6)校核转速超调量:转速环可以达到的动态跟随性能指标为8.31%,小于10%,满足设计要求4、电流闭环控制系统仿真图1电流环仿真模型5、转速环仿真设计图2 转速环仿真模型6、不同PI参数下仿真图对比表1中序号1为以KT=0.25的关系式按典型I 系统设计得到PI调节器的阶跃仿真结果图,可以看出此时无超调、但上升时间长;序号2为以KT=0.5的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时超调量小、上升时间较短,兼顾了稳定性和快速性;序号3为以KT=1的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时上升时间短、但超调大;序号4为开环时仿真结果图,可以看出系统将不会达到稳态。
运动控制岗位实习报告
一、实习背景与目的随着科技的不断发展,运动控制技术已成为智能制造领域的重要研究方向。
为了深入了解运动控制技术在工业自动化中的应用,提高自身的专业素养和实践能力,我于2021年7月至2021年9月在XX科技有限公司的运动控制岗位进行了为期两个月的实习。
本次实习旨在通过实际操作和项目参与,掌握运动控制系统的基本原理、设计方法和应用技术,为今后从事相关领域工作打下坚实基础。
二、实习单位及岗位介绍XX科技有限公司是一家专注于工业自动化设备研发、生产和销售的高新技术企业。
公司产品广泛应用于汽车、机械、电子、包装等行业。
在本次实习中,我担任运动控制岗位实习生,负责协助工程师进行运动控制系统的设计与调试。
三、实习内容与过程1. 理论学习实习初期,我认真学习了运动控制系统的基本原理,包括运动控制理论、电机控制技术、传感器技术等。
通过查阅资料、参加培训等方式,我对运动控制系统的构成、工作原理和常见故障有了初步了解。
2. 项目参与在实习过程中,我参与了多个运动控制项目,具体如下:(1)汽车零部件生产线上的自动化设备调试该项目主要涉及伺服电机、编码器、PLC等运动控制设备的调试。
在工程师的指导下,我负责了设备安装、接线、参数设置等工作,并参与了设备的试运行和调试。
(2)机器人手臂控制系统开发该项目旨在为机器人手臂提供精确的运动控制。
我负责了控制系统硬件选型、软件编写和调试工作,确保机器人手臂能够按照预设轨迹运动。
(3)工业机器人关节运动控制研究针对工业机器人关节运动控制问题,我查阅了相关文献,分析了关节运动控制算法,并参与了算法的仿真和优化。
3. 实习心得与体会(1)理论联系实际通过本次实习,我深刻体会到理论知识在实际工作中的重要性。
只有掌握了扎实的理论基础,才能更好地解决实际问题。
(2)团队合作精神在实习过程中,我学会了与团队成员沟通协作,共同完成项目任务。
这种团队合作精神对于今后的工作具有重要意义。
(3)勇于挑战面对复杂的项目任务,我始终保持积极进取的态度,勇于挑战自我。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单轴电机运动控制实验报告范文
实验一晶闸管直流调速系统电流-转速调节器调试
一.实验目的
1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。
2.掌握直流调速系统主要单元部件的调试步骤和方法。
二.实验内容
1.调节器的调试
三.实验设备及仪器
1.教学实验台主控制屏。
2.MEL—11组件 3.MCL—18组件4.双踪示波器 5.万用表
四.实验方法
1.速度调节器(ASR)的调试
按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。
(1)调整输出正、负限幅值“5”、“6”端接可调电容,使ASR调节器为PI调节器,加入一定的输入电压(由MCL—18的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于5V。
(2)测定输入输出特性将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画
图1-5 速度调节器和电流调节器的调试接线图
出曲线。
(3)观察PI特性
拆除“5”、“6”端短接线,突加给定电压(0.1V),用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。
反馈电容由外接电容箱改变数值。
2.电流调节器(ACR)的调试按图1-5接线。
(1)调整输出正,负限幅值
“9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值等于5V。
(2)测定输入输出特性
将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
(3)观察PI特性
拆除“9”、“10”端短接线,突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。
反馈电容由外接电容箱改变数值。
一.实验目的
1.了解双闭环不可逆直流调速系统的原理,组成及各主要单元部件的原理。
2.熟悉电力电子及教学实验台主控制屏的结构及调试方法。
3.熟悉MCL-18,MCL-33的结构及调试方法
4.掌握双闭环不可逆直流调速系统的调试步骤,方法及参数的整定。
二.实验内容
1.各控制单元调试 2.测定电流反馈系数。
3.测定开环机械特性及闭环静特性。
4.闭环控制特性的测定。
5.观察,记录系统动态波形。
三.实验系统组成及工作原理
双闭环晶闸管不可逆直流调速系统由电流和转速两个调节器综合调节,由于调速系统调节的主要量为转速,故转速环作为主环放在外面,电流环作为付环放在里面,这样可抑制电网电压波动对转速的影响,实验系统的控制回路如图1-8b所示,主回路可参考图1-8a所示。
系统工作时,先给电动机加励磁,改变给定电压的大小即可方便地改变电机的转速。
ASR,ACR均有限幅环节,ASR的输出作为ACR的给定,利用ASR的输出限幅可达到限制起动电流的目的, ACR的输出作为移相触发电路的控制电压,利用ACR的输出限幅可达到限制min和min的目的。
当加入给定Ug后,ASR即饱和输出,使电动机以限定的最大起动电流加速起动,直到电机转速达到给定转速(即Ug=Ufn),并出现超调后,ASR退出饱和,最后稳定运行在略低于给定转速的数值上。
四.实验设备及仪器
1.教学实验台主控制屏。
2.MCL—33组件 3.MEL—11组件4.MCL—18组件
5.电机导轨及测速发电机(或光电编码器) 6.直流电动机M03 7.双踪示波器 8.万用表
五.注意事项
1.三相主电源连线时需注意,不可换错相序。
2.系统开环连接时,不允许突加给定信号Ug起动电机
实验名称:电流、转速调速调节器设计
一、实验目的
1、掌握双闭环直流调速系统的稳态参数计算、系统的稳定性分析
2、了解用MATLAB软件工具对系统的电流环和速度环作PI调节器设计
3、熟悉对系统进行仿真的步骤和方法
二、实验过程 1、设计要求
(1)静态指标:无静差
(2)动态指标:电流超调量小于等于5%;空载启动到额定转速时的转速超调量小于等于10% 2、电流环设计
(1)确定时间常数:经计算得电流环小时间常数之和为0.0037s (2)选择电流调节器结构:采用PI调节器
(3)计算电流调节器参数:电流调节器超前时间常数为0.03s,ACR比例系数为1.013
(4)校验近似条件:均满足近似条件
(5)计算调节器电阻电容:按照计算得出的电阻电容参数,电流环可以达到的动态跟随性能指标为4.3%,小于5%,满足设计要求3、转速环设计
(1)确定时间常数:经计算得转速环小时间常数之和为0.0174s (2)选择转速调节器结构:采用PI调节器
(3)计算转速调节器参数:ASR超前时间常数为0.087s,ASCR
比例系数为11.7
(4)校验近似条件:均满足近似条件
工学院实验报告
(5)计算调节器电阻电容
(6)校核转速超调量:转速环可以达到的动态跟随性能指标为8.31%,小于10%,满足设计要求
4、电流闭环控制系统仿真图1电流环仿真模型
5、转速环仿真设计
图2 转速环仿真模型
6、不同PI参数下仿真图对比
表1中序号1为以KT=0.25的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时无超调、但上升时间长;序号2为以KT=0.5的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时超调量小、上升时间较短,兼顾了稳定性和快速性;序号3为以KT=1的关系式按典型I系统设计得到PI 调节器的阶跃仿真结果图,可以看出此时上升时间短、但超调大;序号4为开环时仿真结果图,可以看出系统将不会达到稳态。
因此序号2的电流、转速调速调节器的设计合理。
工学院实验报告
表1不同PI参数下仿真图对比
三、实验总结
通过本次实验,我掌握了双闭环直流调速系统的稳态参数计算、系统的稳定性分析,学会了使用MATLAB软件对系统的电流环和速度环作PI调节器设计,熟悉了对系统进行仿真的步骤和方法。
模板,内容仅供参考。