机械设计基础课件!速度波动调节
合集下载
机械设计基础教程ppt第八章

✓例如:当max- min=5rad/s时,对于m =10 rad/s 和m =100rad/s的
机械,低速机械的速度波动要明显一些。
3. 速度不均匀系数:角速度变化量和其平均角速度的比 值。工程上用它来表示机械运转的速度波动程度。
(max min ) / m
速度波动程度的衡量指标
❖设计机械时,应满足: [ ]
❖ 最好将飞轮安装在高速轴上。
飞轮尺寸计算
Jf
G(D12
D22
)
/
8g
GD2 4g
关于飞轮调速的几个重要的结论:
1)如果过分追求机械运转速度的均匀性,
即[δ]取值很小,则飞轮的转动惯量就需很大,
将会使飞轮过于笨重。
2)安装飞轮后机械运转的速度仍有周期波 动,即其速度波动不可能达到消除,而只是波 动的幅度减小了而已。
停车阶段 输入机器的能量持续小于机器输出
的能量,机器的转速不断降低。
机器的自调性
机器的自调性? 当外载荷发生变化时,机器 的主轴能够在新的速度下重 新稳定运转。
M d M r
产生周期性速度波动的原因
❖当等效构件回转过角时,
Wd ( ) a M ed ( )d
Wr ( ) a M e ( )d
Fb mbrb
m1r1F1
m2r2 F2
m3r3
mSrS F3
FS
图解法
mbrb
按: m1 r1 + m2 r2 + m3 r3 + mb rb = 0
方向 √
√
√
?
大小 √
√
√
?
m1r1 m2r2
m r =W 称 "质径积" .
机械零件设计 速度波动调节

Abc= ······ = -457p (N/m)
Adc= ······ = 307p (N/m)
c
由能量指示图可得:
Amax= Abc = -Acb = 457p (N/m)
(4)求 JF
JF=
900Amax
p2n2[d]
=
900·457p
p2 · 14402 · 0.05
= 1.263 (kgm3)
-50
-100
+125
-500
+25
-50
+550
0
0
c
2、用能量指示图求 Amax
e
ቤተ መጻሕፍቲ ባይዱ
由能量指示图: Amax = Aeb = Acb + Adc + Aed = 550 + (-100) + 125 = 575
3、 JF = ———
Amax [d] wm2
2、运动周期(运动循环)
在周期性稳定运转阶段, 机器的位移、速度、加速度的某一值,经过一段时间,全部回复到原来的值,这一段时间, 称为一个运动周期。
周期性、非周期性
●
3、平均角速度wm和速度不均匀度系数d
wm =
wmax + wmin
2
d =
wmax - wmin
wm
d [d] (见 P97 表 7 – 1)
也就是说, Emax 和 Emin (对应ω的极值)发生在 Md= Mz 处,
也即在 Md 和 Mz 曲线的交点处.
f
w
wmax
wmin
a
b
JF≥———
Amax wm [d]
2
例一、
Adc= ······ = 307p (N/m)
c
由能量指示图可得:
Amax= Abc = -Acb = 457p (N/m)
(4)求 JF
JF=
900Amax
p2n2[d]
=
900·457p
p2 · 14402 · 0.05
= 1.263 (kgm3)
-50
-100
+125
-500
+25
-50
+550
0
0
c
2、用能量指示图求 Amax
e
ቤተ መጻሕፍቲ ባይዱ
由能量指示图: Amax = Aeb = Acb + Adc + Aed = 550 + (-100) + 125 = 575
3、 JF = ———
Amax [d] wm2
2、运动周期(运动循环)
在周期性稳定运转阶段, 机器的位移、速度、加速度的某一值,经过一段时间,全部回复到原来的值,这一段时间, 称为一个运动周期。
周期性、非周期性
●
3、平均角速度wm和速度不均匀度系数d
wm =
wmax + wmin
2
d =
wmax - wmin
wm
d [d] (见 P97 表 7 – 1)
也就是说, Emax 和 Emin (对应ω的极值)发生在 Md= Mz 处,
也即在 Md 和 Mz 曲线的交点处.
f
w
wmax
wmin
a
b
JF≥———
Amax wm [d]
2
例一、
机械设计基础第7章 机械速度波动的调节

例如:
①惯性玩具小汽车: 阻力↓——储存能量 阻力↑——释放能量 ②冲压:
速度平稳
空回:阻力↓——储存能量
冲压:阻力↑——释放能量
③汽车新型节能研究:
制动时:阻力↓——储存能量 启动时:阻力↑——释放能量
2、非周期性速度波动:随机无规律的速度波动
①特征
长时间A驱>A阻
长时间A驱<A阻
速度 速度
超越极限
ωmax ωmin δ (7 ~ 3) ωm
☆ωm一定,δ↓,ωmax-ωmin↓ 机器运转愈平稳 ☆各种机器,δ因工作性质不同 而不同(见表7-1)。
机器运转的不均匀程度
☆ωm .δ是设计飞轮的重要指标。
二. 飞轮设计的基本原理
飞轮设计的基本问题: 根据ωm和许可δ确定 J飞
在一个运动周期内:
故:机械动能的增减形成机械运转速度的波动
三、速度波动的危害 1、周期性速度波动 危害: ①引起动压力,η ↓和可靠性↓ 。 ②可能在机器中引起振动,影响寿命、强度。 ③影响工艺,产品质量↓ 。 例如:①机床主轴速度波动—工件粗糙度↑、精度↓ ②电唱机转盘速度波动——音质下降 ③汽车发动机主轴速度波动—车厢振动乘客不适 2、非周期性速度波动 危害:机器因速度过高而毁坏,或被迫停车。
M
500Nm
M″
M′
100Nm
0
3 2 4
5 4
3 2
2π
φ
在一个运动循环中:驱动力矩所作的功=阻力矩所作的功
即:
解得:M'=200 Nm 由此可作出(M′-φ)水平直线如图。
②求Amax 将M'与M"交点标注a、b、c、d 则:M′与M″所围面积分为各区间 oa:盈功 标注“+” ab:亏功,标注“-” bc:盈功 标注“+” cd:亏功,标注“-” do:盈功 标注“+” 然后:据各区间盈亏值大小按比例作能量指示图 自o向上作oa:oa区间的盈功Aoa=100×π/2 向a向下作ab:ab区间的亏功Aab=300×π/4 依次类推直到最后一个封闭向量do
机械设计基础7机械运转速度波动的调节

在机械上加上一个转动惯量很大的回转件----飞轮。 当出现盈功时---飞轮的动能增加 当出现亏功时---飞轮的动能减小 飞轮的动能:
1 2 E J ( 2 0 ) 2
, 0 为 某 一 时 间 间 隔 内 的
末角速度与初角速度
飞轮的转动惯量J 越大,角速度的波动越小。虚线为 没安装飞轮时的主轴的速度波动,实线为安装飞轮时的主 轴的速度波动。
最大盈亏功Amax 的确定方法如下: 1.求出各盈亏功
在oa 区间输入输出功之差:
Aoa
a
o
( M M )d
a
o
M ( y y)dx
M [ S1 ]
由图可见S1为亏功,同理可得S2,S4为盈功,S3,S5为亏功。
2. 确定主轴各角位置的动能
§7-2.飞轮设计的近似方法
一、机械运转的平均速度和不均匀系数
设:机械主轴的角速度随时间的变化规律为 一个周期角速度的实际平均值
f (t )
m
1 T
T
dt
0
----称为额定转速
实际计算时是以算术平均值作为实际 平均值:
m
max min
2
max ,
min 分 别 为 最 大 角 速 度
J Amax
2 m
多数飞轮安装在机器的主轴上,如果安装在其他 轴上,必须保证该轴上安装的飞轮与主轴上安装 的飞轮具有相等的动能,即:
m 2 J J( ' ) m
1 1 '2 2 J m J m 2 2
' m 为 任 选 飞 轮 轴 的 平 均速 角度
J 为 安 装 在 该 轴 上 的 飞转 轮动 惯 量
1 2 E J ( 2 0 ) 2
, 0 为 某 一 时 间 间 隔 内 的
末角速度与初角速度
飞轮的转动惯量J 越大,角速度的波动越小。虚线为 没安装飞轮时的主轴的速度波动,实线为安装飞轮时的主 轴的速度波动。
最大盈亏功Amax 的确定方法如下: 1.求出各盈亏功
在oa 区间输入输出功之差:
Aoa
a
o
( M M )d
a
o
M ( y y)dx
M [ S1 ]
由图可见S1为亏功,同理可得S2,S4为盈功,S3,S5为亏功。
2. 确定主轴各角位置的动能
§7-2.飞轮设计的近似方法
一、机械运转的平均速度和不均匀系数
设:机械主轴的角速度随时间的变化规律为 一个周期角速度的实际平均值
f (t )
m
1 T
T
dt
0
----称为额定转速
实际计算时是以算术平均值作为实际 平均值:
m
max min
2
max ,
min 分 别 为 最 大 角 速 度
J Amax
2 m
多数飞轮安装在机器的主轴上,如果安装在其他 轴上,必须保证该轴上安装的飞轮与主轴上安装 的飞轮具有相等的动能,即:
m 2 J J( ' ) m
1 1 '2 2 J m J m 2 2
' m 为 任 选 飞 轮 轴 的 平 均速 角度
J 为 安 装 在 该 轴 上 的 飞转 轮动 惯 量
第07章机械运转速度波动调节ppt课件

1. 研究在外力作用下机械的真实运动规律,目的是 为运动分析作准备。 前述运动分析曾假定是常数,
2但. 研实究际机上械是运变转化速的度的波动及其调节方法,目的是使 机械的转速在允许范围内波动,而保证正常工作。
设计新的机械,或者分析现有机械的工作性能时,往往想知道机械运转的稳定性、构件 的惯性力以及在运动副中产生的反力的大小、Vmax amax的大小,因此要对机械进行运动分析。 而前面所介绍的运动分析时,都假定运动件作匀速运动(ω=const)。但在大多数情况下, ω≠const,而是力、力矩、机构位置、构件质量、转动惯量等参数的函数:ω=F(P、M、φ、 m、J)。只有确定了的原动件运动ω的变化规律之后,才能进行运动分析和力分析,从而为设 计新机械提供依据。这就是研究机器运转的目的。
计。由于机械运转速度不均匀系
铸铁飞轮: vmax≤ 36 m/s 铸钢飞轮: vmax≤ 50 m/s
数δ容许有一个变化范围,所以 这种近似设计可以满足一般的使 用要求。
例题
例10-5 在电机驱动剪床的机组中,阻力矩M"变化曲线如图, 驱动力矩M'=常数,n=1500r/min,[ ]=0.05,Jv、JC忽略不计, 求安装在电机轴上的飞轮转动惯量JF。
为了减小这些不良影响,就必须对速度波动范围进行调节。
§7-1 机械运转速度波动调节的目的和方
二法、产生周期性波动的原因
M'
作用在机械上的驱动力矩M,(φ)和阻力
矩M"(φ)往往是原动机转角的周期性函
数。 分别绘出在一个运动循环内的变化曲线。
a
φ
在一个运动循环内,驱动力矩和阻力矩所 M"
作的功分别为:
§7-1 机械运转速度波动调节的目的和方
机械设计第7章机械速度波动与调节
二、机械运转的平均速度和不均匀系数
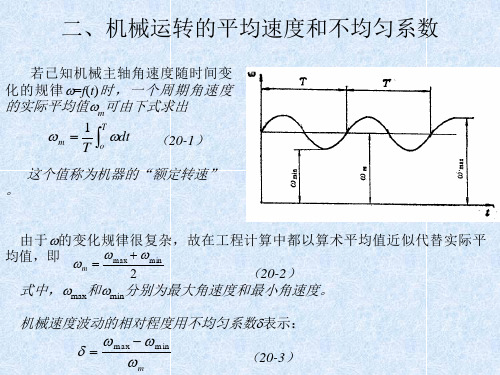
若已知机械主轴角速度随时间变
化 的 规 律 =f(t) 时 , 一 个 周 期 角 速 度
的实际平均值m可由下式求出
m
1 T
T
dt
o
(20-1)
这个值称为机器的“额定转速” 。
由于的变化规律很复杂,故在工程计算中都以算术平均值近似代替实际平
均值,即
m
max
min
2
(速度和最小角速度。
机械速度波动的相对程度用不均匀系数表示:
max min m
(20-3)
三、飞轮设计方法
1.转动惯量的计算
动能的最大变化量即最大剩余功为:
Amax
Emax
E m in
1 2
J
2 max
2 min
J 2m
式中Amax为最大剩余功,或最大盈亏功。
图20-4飞轮结构示意图
因此,有
J Amax 900 Amax
m2 2 n 2
(20-4)
图20-3 转动惯量与 不均匀系数的关系
2.飞轮尺寸确定
般飞轮的轮毂和轮辐的质量很小,近似计算时认为飞轮质量m集中于平均直 径为Dm轮缘上。因此,转动惯量可以写成
J
m
Dm
2
mDm2
2 4
(20-6)
当按照机器的结构和空间位置选定轮缘的平均直径Dm之后,由式(20-6)便 可求出飞轮的质量m。选定飞轮的材料与高宽比H/B后,按轮缘为矩形端面求出 轮缘截面尺寸,见图20-4。
若已知机械主轴角速度随时间变
化 的 规 律 =f(t) 时 , 一 个 周 期 角 速 度
的实际平均值m可由下式求出
m
1 T
T
dt
o
(20-1)
这个值称为机器的“额定转速” 。
由于的变化规律很复杂,故在工程计算中都以算术平均值近似代替实际平
均值,即
m
max
min
2
(速度和最小角速度。
机械速度波动的相对程度用不均匀系数表示:
max min m
(20-3)
三、飞轮设计方法
1.转动惯量的计算
动能的最大变化量即最大剩余功为:
Amax
Emax
E m in
1 2
J
2 max
2 min
J 2m
式中Amax为最大剩余功,或最大盈亏功。
图20-4飞轮结构示意图
因此,有
J Amax 900 Amax
m2 2 n 2
(20-4)
图20-3 转动惯量与 不均匀系数的关系
2.飞轮尺寸确定
般飞轮的轮毂和轮辐的质量很小,近似计算时认为飞轮质量m集中于平均直 径为Dm轮缘上。因此,转动惯量可以写成
J
m
Dm
2
mDm2
2 4
(20-6)
当按照机器的结构和空间位置选定轮缘的平均直径Dm之后,由式(20-6)便 可求出飞轮的质量m。选定飞轮的材料与高宽比H/B后,按轮缘为矩形端面求出 轮缘截面尺寸,见图20-4。
【机械加工】机械运转及速度波动调节48页PPT

统做功在一个波动周期内为零(Wd-Wr=0)。
系 速统度在也一相个等周(期如始图末9的-动1中能A相、等B(两E点A )= ,EB但)在,一原个动周件期的 内的任一区间,驱动功和阻抗功不一定相等,机械的动 能将增加或减少,瞬时速度产生波动。
上述这种稳定运转称为周期性变速稳定运转。许多机械 如牛头刨床、冲床等的运动就属于此类。还有一些机械, 其原动件的运动速度是恒定的,称其为匀速稳定运转, 如鼓风机、提升机等。
等效转化的原则是:
等效构件的等效质量或等效转动惯量具有的动能等于原 机械系统的总动能;
等效构件上作用的等效力或力矩产生的瞬时功率等于原 机械系统所有外力产生的瞬时功率之和。
把这种具有等效质量或等效转动惯量,其上作用有等效 力或等效力矩的等效构件称为原机械系统的等效动力学 模型。
对于单自由度机械系统,只要确定了一个构件的运动, 其他构件的运动就随之确定,因此,通过研究等效构件
5
3、停车阶段:
通常此时驱动力为零,机械系统由正常工作 速度逐渐减速,直到停止。此阶段内功能关
系为 Wr=E。
很多机械,为了缩短停车时间,安装了制动 装置来增加阻力。此时,上式中的Wr除了摩 擦力所消耗的功外,主要是制动力所作的功。
6
三、作用在机械上的驱动力和生产阻力
驱动力由原动机产生, 它通常是机械运动参数 (位移、速度或时间) 的函数,称为原动机的 机械特性。
工序1:在车床上车外圆、车端面、 镗孔和 内孔倒 角;
工序2:在钻床上钻6个小孔。
在同一道工序中,工件可能要经过几次 安装。 工件在 一次装 夹中所 完成的 那部分 工序, 称为安 装。在 工序1中,有 两次安 装。第 一次安 装:用 三爪卡 盘夹住 外圆,车端面C,镗内孔,内孔倒 角,车 外圆。 第二次 安装: 调头用 三爪盘 夹住外 圆,车 端面A和 B,内 孔倒角 。
系 速统度在也一相个等周(期如始图末9的-动1中能A相、等B(两E点A )= ,EB但)在,一原个动周件期的 内的任一区间,驱动功和阻抗功不一定相等,机械的动 能将增加或减少,瞬时速度产生波动。
上述这种稳定运转称为周期性变速稳定运转。许多机械 如牛头刨床、冲床等的运动就属于此类。还有一些机械, 其原动件的运动速度是恒定的,称其为匀速稳定运转, 如鼓风机、提升机等。
等效转化的原则是:
等效构件的等效质量或等效转动惯量具有的动能等于原 机械系统的总动能;
等效构件上作用的等效力或力矩产生的瞬时功率等于原 机械系统所有外力产生的瞬时功率之和。
把这种具有等效质量或等效转动惯量,其上作用有等效 力或等效力矩的等效构件称为原机械系统的等效动力学 模型。
对于单自由度机械系统,只要确定了一个构件的运动, 其他构件的运动就随之确定,因此,通过研究等效构件
5
3、停车阶段:
通常此时驱动力为零,机械系统由正常工作 速度逐渐减速,直到停止。此阶段内功能关
系为 Wr=E。
很多机械,为了缩短停车时间,安装了制动 装置来增加阻力。此时,上式中的Wr除了摩 擦力所消耗的功外,主要是制动力所作的功。
6
三、作用在机械上的驱动力和生产阻力
驱动力由原动机产生, 它通常是机械运动参数 (位移、速度或时间) 的函数,称为原动机的 机械特性。
工序1:在车床上车外圆、车端面、 镗孔和 内孔倒 角;
工序2:在钻床上钻6个小孔。
在同一道工序中,工件可能要经过几次 安装。 工件在 一次装 夹中所 完成的 那部分 工序, 称为安 装。在 工序1中,有 两次安 装。第 一次安 装:用 三爪卡 盘夹住 外圆,车端面C,镗内孔,内孔倒 角,车 外圆。 第二次 安装: 调头用 三爪盘 夹住外 圆,车 端面A和 B,内 孔倒角 。
机械设计基础 第7章 机械运转速度波动的调节

J=
说明:
A max
2 ωmδ
...............飞轮的转动惯量
1, Amax, ωm一定,J与δ成等边双曲线关系.如图:当δ 很小时,要略微减小δ,J激增,使飞轮笨重,成本增加; 2,J, ωm一定, Amax, δ成正比,即盈亏功越大,机 械的运转速度越不均匀; 3, J与ω2m成反比,即主轴平 均转速越高,所需飞轮转动惯量 越小.
二,机械的周期性速度波动 机械在稳定运转阶段,外力做周期性变化,其原动件的角速 度ω在其恒定的平均角速度ωm上下瞬时的变化(即出现波动), 但在一个周期T的始末,其角速度是相等的,这时机械具有的动 能是相等的,即机械输入功和输出功相等.这种速度波动就称为 机械的周期性速度波动.如图中虚线所示. 机械的周期性波动调节的 方法就是在机械中安装飞轮— —具有很大转动惯量的回转构 件. 飞轮的调速是利用它的储 能作用,达到调节作用.
ω x ↑→ J x ↓
∴飞轮装在速度高的轴上.
三,最大盈亏功Amax的确定 M'----驱动力矩 Aoa=μMμφs1
J=
A max
2 ωmδ
...............飞轮ห้องสมุดไป่ตู้转动惯量
M"----阻力矩
设转角0时,动能为E0 Ea=E0- Aoa =E0-μMμφs1 Eb=Ea+ Aab =Ea+ μMμφs2 ………. E0=Ed- Ad0 =Ed- μMμφs5 Emax- Emin = Amax d 也可用能量图表示 b o c a Amax = Aab - Abc +Acd o Amax
由安装空间确定Dm,求出m. 根据轮缘的断面形状,材料的密度ρ,求出体积V,厚度 H,宽度B 1,轮缘断面为矩形:m=Vρ=πDmHBρ,选定H/B , ρ ,可定尺寸. 2 1 D mD 2 选定D,求出m. 2,实心圆盘:J = m = 2 2 8 由:m=V ρ=π D2B ρ/4,选定ρ,可求出B 注意:飞轮轮缘速度越高,其轮缘材质产生的离心力越大, 当离心力超过材料所能承受的强度极限时,轮缘会爆裂. 为了安全,选择Dm和D(外圆直径)时,应使飞轮外圆 的圆周速度小于以下安全数值: 铸铁飞轮:Vmax36m/s 铸钢飞轮: Vmax50m/s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010-12-11
编制:吕亚清
3
二.分类与方法:
1. 周期性的速度波动: 图7-1 周期性的速度波动 驱动力和阻力)作周期性变化 现象: 当外力(驱动力和阻力 作周期性变化→机器 现象 当外力 驱动力和阻力 作周期性变化 机器 主轴ω周期性变化 由图可知, 在经过一个运动周 周期性变化→由图可知 主轴 周期性变化 由图可知 ω在经过一个运动周 之后又变到初始状态→ 期T之后又变到初始状态 动能无增减。 之后又变到初始状态 动能无增减。 整个周期中A驱= A阻→某一瞬间 驱≠ A阻 某一瞬间A 整个周期中 某一瞬间 →引起速度波动。 引起速度波动。 引起速度波动 调节方法: 加上转动惯量很大的回转件-飞轮。 调节方法 加上转动惯量很大的回转件-飞轮。 T ω 盈功使飞轮动能↑ 盈功使飞轮动能 亏功使飞轮动能↓ 亏功使飞轮动能 2.非周期速度波动 非周期速度波动
2010-12-11
编制:吕亚清
7
§7-2飞轮设计的近似方法
设计的基本问题: 在机器运转不均匀系数δ 设计的基本问题 在机器运转不均匀系数 范围内→确定飞轮 确定飞轮J 的容许 范围内 确定飞轮J。 在一般机器中, 在一般机器中,由于飞轮质量 其它构件 →∴飞轮的动能 其它构件动能。 其它构件动能。 ∴ 可近似认为飞轮的动能 飞轮的动能= ∴可近似认为飞轮的动能=整个机器所具的动能 →∴飞轮动能的最大变化值△Emax ∴飞轮动能的最大变化值△ 机器最大盈亏功A =机器最大盈亏功Amax Amax=△Emax=Emax-Emin =J·ω =1/2·J(ωmax2-ωmin2)=J m2·δ J =J ∴飞轮应具的转动惯量: 飞轮应具的转动惯量 J=Amax/(ωm2·δ)=900Amax/(π2·n2·δ) = A
t
2010-12-11
编制:吕亚清
5
2.非周期速度波动 2.非周期速度波动
现象: 现象 当外力突然发生不规 则的较大变化→机器速度不 则的较大变化 机器速度不 规则的变化、 规则的变化、或间歇性的变 化→非周期速度波动 非周期速度波动 →不能利用飞轮来调节 不能利用飞轮来调节。 不能利用飞轮来调节 方法: 调速器→主要调节驱动力 方法 调速器 主要调节驱动力。 主要调节驱动力。 例:离心式调速器 离心式调速器 图7-2 p.96
节流阀 蒸汽 工作机 原动机
2010-12-11
编制:吕亚清
6
(二)机器主轴的平均角速度 和运转速度不均匀系数
(7-2) *平均角速度: ωm≈ (ωmax+ ωmin)/2 平均角速度 算术平均角速度) 名义速度 (算术平均角速度)→名义速度
*运转速度不均匀系数:δ=(ωmax-ωmin)/ωm 运转速度不均匀系数 =
2010-12-11
t
编制:吕亚清
4
飞轮动能变化: 飞轮动能变化 △E=1/2·J(ω 2- ω02) E= J J-飞轮的转动惯量 J-飞轮的转动惯量 由式可见,飞轮J越大 使速度波动 实线) 使速度波动(实线 由式可见 飞轮J越大→使速度波动 实线 ↓ 飞轮 →同时,飞轮能利用储备的能量克服短时过载 同时, 同时 →∴可选功率较小的原动机。 ∴可选功率较小的原动机。 ω T
动画
编制:吕亚清
动画
11
2010-12-11
2010-12-11
编制:吕亚清
10
§ 1-1连杆机构及其传动特点
定义:连杆机构由若干个构件通过低副连接而组成, 定义:连杆机构由若干个构件通过低副连接而组成,又称为低 副机构。 副机构。 共同特点: 原动件1的运动经过不与机架直接相连的中间构件 的运动经过不与机架直接相连的中间构件2 共同特点: 原动件 的运动经过不与机架直接相连的中间构件 传递到从动件3上 中间构件称为连杆。 传递到从动件 上。中间构件称为连杆。 构件多呈杆 状——简称 简称 为杆 动画 根据杆数命 例如: 名,例如: 四杆机构
编制:吕亚清
2010-12-11
(7-6)
8
1.当ωm、Amax一定时,J与δ的关系为一等 当 一定时, 的关系为一等 机器运动匀速性↑。 边双曲线。 J 边双曲线。δ↓J↑→机器运动匀速性 。但不 机器运动匀速性 宜过分追求机器运转的均匀性(δ较小 而使J 较小), 宜过分追求机器运转的均匀性 较小 而使J过 J 飞轮笨重→成本 大→飞轮笨重 成本 。 飞轮笨重 成本↑ 一定时,A 2.当ωm、J一定时,Amax与δ成 当 、J一定时 成 正比→A 机器运转愈不均匀。 正比 Amax↑机器运转愈不均匀。 机器运转愈不均匀 O
δ
小结:机器速度波动的原因、分类及调节的方法 小结:机器速度波动的原因、分类及调节的方法
2010-12-11
编制:吕亚清
9
Hale Waihona Puke 二章§ 2-1 - § 2-2 - § 2-3 - § 2-4 -
平面连杆机构
连杆机构及其传动特点 铰链四杆机构的基本型式及其应用 平面四杆机构的演化 平面连杆机构的工作特性
分析: 分析
(图7-3) 一定时,J 3.当Amax、δ一定时 J与ωm2成反 当 一定时 速度↑,所需 宜将飞轮安装在高速轴上 比→速度 所需J↓→宜将飞轮安装在高速轴上。 速度 所需J 宜将飞轮安装在高速轴上。 Amax可按机器在一个运动循环中的驱动力和阻 ∴飞轮应具的转动惯量J=Amax/(ωm2·δ) 力的功率变化曲线来定。 力的功率变化曲线来定。而δ、ωm则按机器具体 、 =900Amax/(π2·n2·δ) (7-6) 工作要求来选定。 工作要求来选定。
机械设计基础
主讲:吕亚清 机电工程学院 机械设计研究室
2010-12-11
编制:吕亚清
1
第7 章
机械运转速度波动的调节
Motion of Mechanical Systems and Its Regulation
2010-12-11
编制:吕亚清
2
§7-1 机器运转速度波动调节的目的和方法
(一)调节机器速度波动的目的和方法 一 调节机器速度波动的目的和方法 目的: 一.目的 如果机械驱动力所作的功 阻力所作的功 目的 如果机械驱动力所作的功=阻力所作的功 A驱=A阻→机械主轴匀速运转 风扇 机械主轴匀速运转(风扇 机械主轴匀速运转 风扇) 但许多机器,每一瞬间A 但许多机器,每一瞬间 驱≠A阻 A驱>A阻→盈功 机械动能 盈功→机械动能 盈功 机械动能↑ →机械速度的波动 机械速度的波动 A驱<A阻→亏功 机械动能 亏功→机械动能 亏功 机械动能↓ 使运动副产生附加动压力→机械振动 质量↓ 使运动副产生附加动压力 机械振动↑η↓质量 机械振动 质量 →必须对机械速度波动进行调节 必须对机械速度波动进行调节 →这类机械容许的范围内 这类机械容许的范围内
(7-3)
可得:ω 由(7-2)(7-3)可得 max=ωm(1+δ/2) 可得 + ωmin =ωm(1-δ/2) - 由式可见,δ↓→主轴越接近匀速转动 由式可见 主轴越接近匀速转动
(7-4) (7-5)
→不同机器允许的 不同 表(7-1) P.99 不同机器允许的δ不同 不同机器允许的 不同→
编制:吕亚清
3
二.分类与方法:
1. 周期性的速度波动: 图7-1 周期性的速度波动 驱动力和阻力)作周期性变化 现象: 当外力(驱动力和阻力 作周期性变化→机器 现象 当外力 驱动力和阻力 作周期性变化 机器 主轴ω周期性变化 由图可知, 在经过一个运动周 周期性变化→由图可知 主轴 周期性变化 由图可知 ω在经过一个运动周 之后又变到初始状态→ 期T之后又变到初始状态 动能无增减。 之后又变到初始状态 动能无增减。 整个周期中A驱= A阻→某一瞬间 驱≠ A阻 某一瞬间A 整个周期中 某一瞬间 →引起速度波动。 引起速度波动。 引起速度波动 调节方法: 加上转动惯量很大的回转件-飞轮。 调节方法 加上转动惯量很大的回转件-飞轮。 T ω 盈功使飞轮动能↑ 盈功使飞轮动能 亏功使飞轮动能↓ 亏功使飞轮动能 2.非周期速度波动 非周期速度波动
2010-12-11
编制:吕亚清
7
§7-2飞轮设计的近似方法
设计的基本问题: 在机器运转不均匀系数δ 设计的基本问题 在机器运转不均匀系数 范围内→确定飞轮 确定飞轮J 的容许 范围内 确定飞轮J。 在一般机器中, 在一般机器中,由于飞轮质量 其它构件 →∴飞轮的动能 其它构件动能。 其它构件动能。 ∴ 可近似认为飞轮的动能 飞轮的动能= ∴可近似认为飞轮的动能=整个机器所具的动能 →∴飞轮动能的最大变化值△Emax ∴飞轮动能的最大变化值△ 机器最大盈亏功A =机器最大盈亏功Amax Amax=△Emax=Emax-Emin =J·ω =1/2·J(ωmax2-ωmin2)=J m2·δ J =J ∴飞轮应具的转动惯量: 飞轮应具的转动惯量 J=Amax/(ωm2·δ)=900Amax/(π2·n2·δ) = A
t
2010-12-11
编制:吕亚清
5
2.非周期速度波动 2.非周期速度波动
现象: 现象 当外力突然发生不规 则的较大变化→机器速度不 则的较大变化 机器速度不 规则的变化、 规则的变化、或间歇性的变 化→非周期速度波动 非周期速度波动 →不能利用飞轮来调节 不能利用飞轮来调节。 不能利用飞轮来调节 方法: 调速器→主要调节驱动力 方法 调速器 主要调节驱动力。 主要调节驱动力。 例:离心式调速器 离心式调速器 图7-2 p.96
节流阀 蒸汽 工作机 原动机
2010-12-11
编制:吕亚清
6
(二)机器主轴的平均角速度 和运转速度不均匀系数
(7-2) *平均角速度: ωm≈ (ωmax+ ωmin)/2 平均角速度 算术平均角速度) 名义速度 (算术平均角速度)→名义速度
*运转速度不均匀系数:δ=(ωmax-ωmin)/ωm 运转速度不均匀系数 =
2010-12-11
t
编制:吕亚清
4
飞轮动能变化: 飞轮动能变化 △E=1/2·J(ω 2- ω02) E= J J-飞轮的转动惯量 J-飞轮的转动惯量 由式可见,飞轮J越大 使速度波动 实线) 使速度波动(实线 由式可见 飞轮J越大→使速度波动 实线 ↓ 飞轮 →同时,飞轮能利用储备的能量克服短时过载 同时, 同时 →∴可选功率较小的原动机。 ∴可选功率较小的原动机。 ω T
动画
编制:吕亚清
动画
11
2010-12-11
2010-12-11
编制:吕亚清
10
§ 1-1连杆机构及其传动特点
定义:连杆机构由若干个构件通过低副连接而组成, 定义:连杆机构由若干个构件通过低副连接而组成,又称为低 副机构。 副机构。 共同特点: 原动件1的运动经过不与机架直接相连的中间构件 的运动经过不与机架直接相连的中间构件2 共同特点: 原动件 的运动经过不与机架直接相连的中间构件 传递到从动件3上 中间构件称为连杆。 传递到从动件 上。中间构件称为连杆。 构件多呈杆 状——简称 简称 为杆 动画 根据杆数命 例如: 名,例如: 四杆机构
编制:吕亚清
2010-12-11
(7-6)
8
1.当ωm、Amax一定时,J与δ的关系为一等 当 一定时, 的关系为一等 机器运动匀速性↑。 边双曲线。 J 边双曲线。δ↓J↑→机器运动匀速性 。但不 机器运动匀速性 宜过分追求机器运转的均匀性(δ较小 而使J 较小), 宜过分追求机器运转的均匀性 较小 而使J过 J 飞轮笨重→成本 大→飞轮笨重 成本 。 飞轮笨重 成本↑ 一定时,A 2.当ωm、J一定时,Amax与δ成 当 、J一定时 成 正比→A 机器运转愈不均匀。 正比 Amax↑机器运转愈不均匀。 机器运转愈不均匀 O
δ
小结:机器速度波动的原因、分类及调节的方法 小结:机器速度波动的原因、分类及调节的方法
2010-12-11
编制:吕亚清
9
Hale Waihona Puke 二章§ 2-1 - § 2-2 - § 2-3 - § 2-4 -
平面连杆机构
连杆机构及其传动特点 铰链四杆机构的基本型式及其应用 平面四杆机构的演化 平面连杆机构的工作特性
分析: 分析
(图7-3) 一定时,J 3.当Amax、δ一定时 J与ωm2成反 当 一定时 速度↑,所需 宜将飞轮安装在高速轴上 比→速度 所需J↓→宜将飞轮安装在高速轴上。 速度 所需J 宜将飞轮安装在高速轴上。 Amax可按机器在一个运动循环中的驱动力和阻 ∴飞轮应具的转动惯量J=Amax/(ωm2·δ) 力的功率变化曲线来定。 力的功率变化曲线来定。而δ、ωm则按机器具体 、 =900Amax/(π2·n2·δ) (7-6) 工作要求来选定。 工作要求来选定。
机械设计基础
主讲:吕亚清 机电工程学院 机械设计研究室
2010-12-11
编制:吕亚清
1
第7 章
机械运转速度波动的调节
Motion of Mechanical Systems and Its Regulation
2010-12-11
编制:吕亚清
2
§7-1 机器运转速度波动调节的目的和方法
(一)调节机器速度波动的目的和方法 一 调节机器速度波动的目的和方法 目的: 一.目的 如果机械驱动力所作的功 阻力所作的功 目的 如果机械驱动力所作的功=阻力所作的功 A驱=A阻→机械主轴匀速运转 风扇 机械主轴匀速运转(风扇 机械主轴匀速运转 风扇) 但许多机器,每一瞬间A 但许多机器,每一瞬间 驱≠A阻 A驱>A阻→盈功 机械动能 盈功→机械动能 盈功 机械动能↑ →机械速度的波动 机械速度的波动 A驱<A阻→亏功 机械动能 亏功→机械动能 亏功 机械动能↓ 使运动副产生附加动压力→机械振动 质量↓ 使运动副产生附加动压力 机械振动↑η↓质量 机械振动 质量 →必须对机械速度波动进行调节 必须对机械速度波动进行调节 →这类机械容许的范围内 这类机械容许的范围内
(7-3)
可得:ω 由(7-2)(7-3)可得 max=ωm(1+δ/2) 可得 + ωmin =ωm(1-δ/2) - 由式可见,δ↓→主轴越接近匀速转动 由式可见 主轴越接近匀速转动
(7-4) (7-5)
→不同机器允许的 不同 表(7-1) P.99 不同机器允许的δ不同 不同机器允许的 不同→