步进电机基本原理及protues仿真共12页文档
基于Proteus的步进电机控制系统仿真设计
步进电机结构及原理

步进电机结构及原理
步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制元件。
它利用电磁学原理,将电能转换为机械能。
其结构通常包括前后端盖、轴承、中心轴、转子铁芯、定子铁芯、定子组件、波纹垫圈和螺钉等部分。
步进电机的工作原理基于电磁感应定律。
当施加在电机线圈上的电脉冲信号产生磁场时,磁场与定子铁芯相互作用产生转矩,驱动转子旋转。
通过控制施加在电机线圈上的电脉冲顺序、频率和数量,可以实现对步进电机的转向、速度和旋转角度的控制。
每接收一个脉冲信号,步进电机就按设定的方向转动一个固定的角度,称为“步距角”,其旋转是以固定的角度一步一步运行的。
步进电机具有一些显著的特点。
首先,它们是开环控制系统的一部分,这意味着它们不依赖于位置反馈来调节运动。
其次,步进电机具有高精度的定位能力,这使得它们在需要精确控制位置的应用中非常有用。
此外,步进电机可以在不同的负载条件下保持恒定的速度,因为电机的转速只取决于脉冲信号的频率,而不受负载变化的影响。
总的来说,步进电机是一种功能强大且适应性强的电机类型,广泛应用于各种需要精确控制位置和速度的场合。
如需了解更多信息,建议咨询电机方面的专家或查阅相关专业书籍。
步进电机-驱动PROTEL_原理图

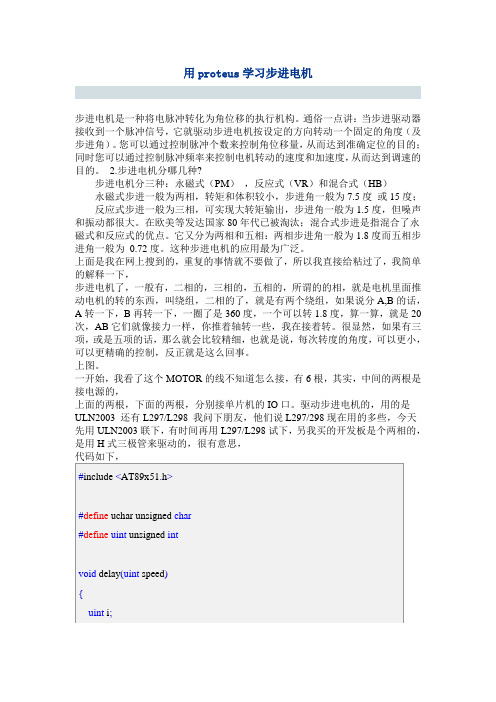
步进电机-驱动PROTEL_原理图U0139P10/TP00238P11/TP01337P12P02436P13P03535P14P04634P15P05733P16P0 6832BP17P07M1321INT1P201222MotorINT0P2123P221524T1P231425T0P2426P253127E A/VPP2628P2719X118X2C39100.1uFC1RESETRXD11CapCapTXD1730CapPol1C40.1uF9RDALE/P1629100uFC2)WRPSEN100uF+6VAT89S52Cap Pol1( +5D1D2DiodeDiode VCCU159PortIN1VSS74PortIN2VS10PortIN3122PortIN4OUT1电压可以不一样的3D3D4vsOUT2613DiodeDiode和PortEN AOUT3是用来驱动电机的;在此一定要注意需要两路直流电源来对1114vssPortEN BOUT4Vs系统供电。
脚14ISENA815GNDISEN BL298N芯片的;而通过一路全桥来驱动另一路电机。
通过一路全桥来驱动一路电机,同理的地是是同一个地;out4out2VsL298N和和out3out1 对应IN1,IN2对应是用来驱动Vss脚 IN3,IN4注意单片机的地和VCCR8R9R10Res2Res2Res210K10K10KS3S2S1SW-PBSW-PBSW-PBIN2PortENAVCCC6Cap30pFY1XTALC521Cap30pFR4100uFRes2RESETC710KSW-PBCap Pol1VCCP1.0,P1.1,P1.2用来设计三个按键,key1,key2,key3;P2.0,P2.1用来与L298N中的IN1,IN2相连接;控制步进电机的正转、反转和停止; P2.2是用来控制电机的使能的,接在ENA上;如要实现电机的正传、反转的加减速就要对P2.2即ENA脚给PWM信号比如还要设置两个按键key4和key5来控制直流电机的加速和减速;比如有如下函数; /*********************************************************/ uchar NUM0=600;//全局变量uchar Flag=0;//清零标志位;对Ms清零;/*id time0_init(void){TMOD=0x01; //16 位计数器/定时器,定时器0;TH0=(65536-1000)/256; //AT89S52为12M晶振,计数1200才产生1ms TL0=(65536-1000)%256;EA=1; //开启总中断ET0=1; //开启定时器1中断TR0=1; //开启定时器1,定时器一允许}void time0_int(void) interrupt 1 {H0=(65536-1000)/256; // AT89S52为12M晶振,计数1200才产生1ms TL0=(65536-1000)%256;Ms=NUM0}*/for(i=0;i< Ms;i++){ENA=1;}else if(i= Ms;i<=1200;i++){ENA=0;Flag=1;}if(flag){Ms= NUM0;}/*****************************************************************/ KEYADD_SUB(){if(key4==0) //加速按键{delayms(2) ;//while(key1==0);Ms++;//正脉宽加一if(Ms>=1200)Ms=1200;//最高速度}if(key5==0)//减速按键{delayms(2) ;//while(key2==0);Ms-- //脉宽减一if(Ms<=0)Ms=0; //停止}}/***************************************************************/ /***************************************************************/ 下面是控制程序;经现场调试,可行;程序如下:/************************************************************/#include<reg52.h>#include"delay.h"#define uchar unsigned char#define uint unsigned int//*********************//sbit ENA = P2^2; //驱动芯片使能,若为0则电机停止;sbit IN1 = P2^1; //控制电机正转和反转sbit IN2 = P2^0; //控制电机正转和反转sbit key1 = P1^0; //此键按下,电机正转;IN1=1;IN2=0 ;ENA=1 sbit key2 = P1^1; //此键按下,电机反转;IN1=0,IN2=1 ;ENA=1 sbit key3 = P1^2; //此键按下,电机刹停; IN1=1,IN2=1 ;ENA=1 //*********************// int motor_change_mank=0;// 按键设置//**********************// uint keylogo(){if(key1==0){delayms(2) ;//while(key1==0);motor_change_mank=1;//正转标志位}if(key2==0){delayms(2) ;//while(key2==0);motor_change_mank=2;//反转标志位}if(key3==0){delayms(2) ;//while(key3==0);motor_change_mank=0;//刹停标志位}return(motor_change_mank);}//**********************// //控制驱动芯片函数//**********************// void execute_motor() { switch(motor_change_mank){case 0: //刹停标志位{IN1 = 1;IN2 = 1;ENA = 1;}break;case 1: //正转标志位{IN1 = 1;IN2 = 0;ENA = 1;}break;case 2: //反转标志位{IN1 = 0;IN2 = 1;ENA = 1;}break;default:break;}}//**********************// void main(){while(1){keylogo();execute_motor();}}/******************************************************************* ***//******************************************************************* ***/#define uint unsigned intvoid delayms(uint n) {int i;for(;n>0;n--)for(i=0;i<1;i++);}/******************************************************************* ***//******************************************************************* ***/#ifndef delay_h#define delay_h#define uint unsigned intextern void delayms(uint n);#endif/******************************************************************* ****//******************************************************************* ****/对如驱动芯片L298N的中文资料我这里有很多,你在论文中阐述时要抓住要点;进行简短的说明;对于调速的问题也有第二种方法;就是对驱动芯片的功率电源Vs进行改变电压;可以用DAC进行控制,如用单片机控制DAC,是输出的模拟电压可通过按键来升高和降低;这样在电机正传或者反转时只要Vs所给的电压升高或者降低则电机的转速就会增加或者减少;这样亦不失为一种好的控制直流电机转速的方法;就是成本稍高而已~//////////////////////////////////////////////////////////////////// //////////////////////////////////////////////////////////////////////// //////////////////////////////////////////////////////////////////////// //////////////////////////////////////////////////////////////////////// 或者用下面的一个程序略作修改即可;/*1、学习目的:利用定时器产生PWM,了解原理和使用方法2、硬件要求:LED灯定时器3、试验现象:LED灯由亮到灭,由灭到亮逐步变化,也就是调光现象*/#include <reg52.h>sbit LED = P1^2;unsigned char CYCLE; //定义周期该数字X基准定时时间如果是10 则周期是10 x 0.1ms unsigned char PWM_ON ;//定义高电平时间void delay(unsigned int cnt){while(--cnt);}main(){bit Flag;TMOD |=0x01;TH0=(65536-100)/256;//定时器设置 0.1ms in 12M crystalTL0=(65536-100)%256;//定时0.1mSIE= 0x82; //打开中断TR0=1;CYCLE = 10;// 时间可以调整这个是10调整 8位PWM就是256步while(!Flag){delay(20000); //延时时间,从一个亮度到下一个亮度的间隔时间,速度快就能看到连续效果PWM_ON++; //这个使用较长延时,以便能看清楚变化过程if(PWM_ON == CYCLE){ //这个里可以添加其他程序如到最亮时候控制设备Flag=1;}}while(Flag) //亮度递减同上,是个相反的过程{delay(20000);PWM_ON--;if(PWM_ON == 0){Flag=0;}}}/********************************/ /* 定时中断 *//********************************/ void tim(void) interrupt 1 using 1 { static unsigned char count; // TH0=(65536-100)/256;TL0=(65536-100)%256;//定时0.1mSif (count==PWM_ON){LED = 1; //灯灭}count++;if(count == CYCLE){count=0;if(PWM_ON!=0) //如果左右时间是0 保持原来状态LED = 0;//灯亮}}。
用proteus学习步进电机
用proteus学习步进电机步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.步进电机分哪几种?步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。
这种步进电机的应用最为广泛。
上面是我在网上搜到的,重复的事情就不要做了,所以我直接给粘过了,我简单的解释一下,步进电机了,一般有,二相的,三相的,五相的,所谓的的相,就是电机里面推动电机的转的东西,叫绕组,二相的了,就是有两个绕组,如果说分A,B的话,A转一下,B再转一下,一圈了是360度,一个可以转1.8度,算一算,就是20次,AB它们就像接力一样,你推着轴转一些,我在接着转。
很显然,如果有三项,或是五项的话,那么就会比较精细,也就是说,每次转度的角度,可以更小,可以更精确的控制,反正就是这么回事。
上图。
一开始,我看了这个MOTOR的线不知道怎么接,有6根,其实,中间的两根是接电源的,上面的两根,下面的两根,分别接单片机的IO口。
驱动步进电机的,用的是ULN2003 还有L297/L298 我问下朋友,他们说L297/298现在用的多些,今天先用ULN2003联下,有时间再用L297/L298试下,另我买的开发板是个两相的,是用H式三极管来驱动的,很有意思,for(i=0;i<speed;i++){}}void main(){uint j,count= 20;uint speed = 2000;while(1){for(j=0;j<count;j++){P1=0x03;//4个引脚轮流转动delay(speed);P1=0x06;delay(speed);P1=0x0c;delay(speed);P1=0x09;delay(speed);}}}步进电动机(Step Motor)是一种数字控制电动机,它能将数字脉冲信号转换成角位移,即向其输出一个脉冲信号,步进电机就转动一个角度或者直线位移一步,所以称其为步进电机。
基于Proteus的步进电机控制系统仿真设计-精品

计算机控制技术课程设计报告《基于Proteus的步进电机控制系统仿真设计》专业及班级______ 09自动化(1)班_________ 姓名_____ 吴红田坤王林指导老师_______ 丁健______________完成时间_______ _ 2012-6-17__________________基于protues的步进电机控制系统设计摘要:步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。
控制系统通过单片机存储器、I/O接口、中断、键盘、LED显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。
为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。
人们用它来驱动时钟和其他采用指针的仪器,打印机、绘图仪,磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等机械装置。
此外作为执行元件,步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中,随着微电子和计算机技术的发展,它的需要量与日俱增,在各个国民经济领域都有应用。
步进电机是机电数字控制系统中常用的执行元件,由于其精度高、体积小、控制方便灵活,因此在智能仪表和位置控制中得到了广泛的应用,大规模集成电路的发展以及单片机技术的迅速普及,为设计功能强,价格低的步进电机控制驱动器提供了先进的技术和充足的资源。
一、步进电机原理、控制技术及其特点由于步进电机是一种将电脉冲信号转换成直线或角位移的执行元件,它不能直接接到交直流电源上,而必须使用专业设备….步进电机控制驱动器,典型步进电机控制系统的控制器可以发出脉冲频率从几赫兹到几千赫兹可以连续变化的脉冲信号,它为环形分配器提供脉冲序列,环形分配器的主要功能是把来自控制环节的脉冲序列按一定的规律分配后,经过功率放大器的放大加到步进电机驱动电源的各项输入端,以驱动步进电机的转动,环形分配器主要有两大类:一类是用计算机软件设计的方法实现环形分配器要求的功能,通常称软环形分配器。
步进电机工作原理及实现PPT

N 为几,一种齿距角分几步走完。
微机控制技术
4.4.2 步进电机控制系统原理
图4—41步进电机控制系统旳构成
p129
微机控制技术
4.4.2 步进电机控制系统原理
(1)步进控制器 ① 涉及:缓冲寄存器、环形分配器、控制逻辑及
正、反转向控制门等。 ② 作用:
微机控制技术
4.4.2 步进电机控制系统原理
本课主要处理如下几种问题: (1) 用软件旳措施实现脉冲序列; (2) 步进电机旳方向控制; (3) 步进电机控制程序旳设计。
微机控制技术
4.4.2 步进电机控制系统原理
1.脉冲序列旳生成
图4—43 脉冲序列 P130 微机控制技术
4.4.2 步进电机控制系统原理
(2)根据所选定旳步进电机及控制方式,写出相应控制方 式旳数学模型。 上面讲旳三种控制方式旳数学模型分别为:
微机控制技术
4.4.2 步进电机控制系统原理
★ 三相单三拍
控制位
工控
步 PC. PC. PC. PC. PC. PC. PC. PC. 作 制 序 7 6 5 4 3 2 1 0 状模
C相 B相 A相 态 型
1 0 0 0 0 0 0 0 1 A 01H
2 0 0 0 0 0 0 1 0 B 02 H
3 0 0 0 0 0 1 0 0 C 04 H
微机控制技术
★ 三相双三拍
用 P1口 旳 P1.2 、P1.1、P1.0 相应 C、B、A 相 进行控制 。
4.4.2 步进电机控制系统原理
★同理,能够得出双三拍和三相六拍旳控制模型: 双三拍 03H,06H,05H
AABBBCCCA ;
基于PROTUES的单片机步进电机速度控制系统的设计与仿真
前言步进电机成为执行元件,是机电一体化的重要产品其一,频繁使用在种种自动化操控系统中。
伴随微型电力电子和计算机技术的扩展,步进电机的需求量不断增加,在每一个国民经济地方都有使用。
最近几年来,伴随数字电子技术与微操控器的迅速崛起。
从而使得步进电机被频繁用于诸多运动操控中使用,这是因为数字输入性能的步进电机允许它连接到任何数字操控器。
在步进电机的操控的电路中能够根据操控脉冲信号个数来操控角位移量,所以实现准确定位的最终结果; 因为步进电机每次输入一个脉冲信号就可以转动一个固定的角位移,简单的说一个脉冲信号与一个固定角位移是一一对应关系。
这样就能够根据操控步进电机的任意两个连续脉冲信号的时间间隔来更改脉冲信号的频率,通过控制时间延时长短来操控步进角从而间接更改步进电机旋转的速度,最后达到实现步进电机的调节速度的效果。
步进电机能够成为一种操控用的特种电机,根据其没有积累的误差(精度为100%)的特性,频繁使用在种种开环操控。
伴随微型电力电子和计算机技术的扩展,步进电机的需求和日俱增,研究制造步进电机驱动器和操控系统具备非常重要的意义。
第1章绪论第一节单片机控制步进电机的背景与意义步进电机是根据操控脉冲信号个数来间接操控角位移量,最后实现准确定位的最终结果;它是一种电机一体化系统在增量运动转换成发散的数字信号输入的机械运动。
步进电机轴或者主轴旋转发散一步增量时,命令脉冲信号使用在适当的序列转子旋转固定一步取决于其建设。
较直流电机步进电机有诸多优势,即低摩擦,寿命长,使用的轴承极其稳定,由于没有接触刷和减少转子散热,并且根据其没有积累误差(精度为100%)的特性,频繁使用在种种开环操控系统。
步进电机能够成为一种操控用的特种电机。
它被成为最常用的一种电机,频繁使用在数控机床、机器人、自动化仪表等地方。
步进电机有3种:永磁式(PM),反应式(VR)和混合式(HB)。
步进电机是通过用电脉冲信号进行操控的,通俗的说:步进电机的位置和速度由脉冲信号数和频率决定。
基于proteus步进电机仿真及程序

proteus中的步进电机有两种,六线制(MOTOR-STEPPER)和四线制(MOTOR-BISTEPPER),六线制的左右中间两根线接电源,任然剩下四根,但的顺序和四线制的不同,见下图。
注意a,b,c,d的顺序在实际情况中,单片机是不能直接拖动步进电机的,需用ULN2003这样的器件两个步进电机都是四相电机。
如果用四拍:那么P2输出的(顺时针)顺序就是:0x03,0x06,0x0c,0x09a 1 0 0 1b 1 1 0 0c 0 1 1 0d 0 0 1 1如果用八拍:那么P2输出的(顺时针)顺序就是:0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09a 1 1 0 0 0 0 0 1b 0 1 1 1 0 0 0 0c 0 0 0 1 1 1 0 0d 0 0 0 0 0 1 1 1给一个测试八拍的仿真程序:1.#include<reg52.h>2.3.main(){4.while(1){5.unsigned int i,j,k;6.for(k=0;k<255;k++){7.for(i=0;i<75;i++)8.for(j=0;j<255;j++);9.P2=0x01;10.for(i=0;i<75;i++)11.for(j=0;j<255;j++);12.P2=0x03;13. for(i=0;i<75;i++)14.for(j=0;j<255;j++);15.P2=0x02;16.17. for(i=0;i<75;i++)18.for(j=0;j<255;j++);19.P2=0x06;20.for(i=0;i<75;i++)21.for(j=0;j<255;j++);22.P2=0x04;23.for(i=0;i<75;i++)24.for(j=0;j<255;j++);25.P2=0x0c;26. for(i=0;i<75;i++)27.for(j=0;j<255;j++);28.P2=0x08;29.30. for(i=0;i<75;i++)31.for(j=0;j<255;j++);32.P2=0x09;33.34.35.}36. }37.}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A 对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
不过,出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用A-AB-B-BC -C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。
甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。
不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。
并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。
只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。
力矩:电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力F与(dФ/dθ)成正比其磁通量Ф=Br*SBr为磁密,S为导磁面积F与L*D*Br成正比L为铁芯有效长度,D为转子直径Br=N•I/RN•I为励磁绕阻安匝数(电流乘匝数)R为磁阻。
力矩=力*半径力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态)因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。
步进电机的静态指标术语相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
来自:http://hi.baidu/siyong2008/blog/item/b60912d0d34f6bd5562c84f8.h tml1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.步进电机分哪几种?步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。
这种步进电机的应用最为广泛。
3.什么是保持转矩(HOLDING TORQUE)?保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
4.什么是DETENT TORQUE?DETENT TORQUE 是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
5.步进电机精度为多少?是否累积?一般步进电机的精度为步进角的3-5%,且不累积。
6.步进电机的外表温度允许达到多少?步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
7.为什么步进电机的力矩会随转速的升高而下降?当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。
在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
8.为什么步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声?步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。
如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
9.如何克服两相混合式步进电机在低速运转时的振动和噪声?步进电机低速转动时振动和噪声大是其固有的缺点,一般可采用以下方案来克服:A.如步进电机正好工作在共振区,可通过改变减速比等机械传动避开共振区;B.采用带有细分功能的驱动器,这是最常用的、最简便的方法;C.换成步距角更小的步进电机,如三相或五相步进电机;D.换成交流伺服电机,几乎可以完全克服震动和噪声,但成本较高;E.在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大。
10.细分驱动器的细分数是否能代表精度?步进电机的细分技术实质上是一种电子阻尼技术(请参考有关文献),其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。
比如对于步进角为1.8°的两相混合式步进电机,如果细分驱动器的细分数设置为4,那么电机的运转分辨率为每个脉冲0.45°,电机的精度能否达到或接近0.45°,还取决于细分驱动器的细分电流控制精度等其它因素。
不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。
11.四相混合式步进电机与驱动器的串联接法和并联接法有什么区别?四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。
串联接法一般在电机转速较的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。
12.如何确定步进电机驱动器的直流供电电源?A.电压的确定:混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如IM483的供电电压为12~48VDC),电源电压通常根据电机的工作转速和响应要求来选择。
如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。
B.电流的确定:供电电源电流一般根据驱动器的输出相电流I来确定。
如果采用线性电源,电源电流一般可取I 的1.1~1.3倍;如果采用开关电源,电源电流一般可取I 的1.5~2.0倍。
13.混合式步进电机驱动器的脱机信号FREE一般在什么情况下使用?当脱机信号FREE为低电平时,驱动器输出到电机的电流被切断,电机转子处于自由状态(脱机状态)。
在有些自动化设备中,如果在驱动器不断电的情况下要求直接转动电机轴(手动方式),就可以将FREE信号置低,使电机脱机,进行手动操作或调节。
手动完成后,再将FREE信号置高,以继续自动控制。
14.如果用简单的方法调整两相步进电机通电后的转动方向?只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可。
关于驱动器的细分原理及一些相关说明(转载)在国外,对于步进系统,主要采用二相混合式步进电机及相应的细分驱动器。
但在国内,广大用户对“细分”还不是特别了解,有的只是认为,细分是为了提高精度,其实不然,细分主要是改善电机的运行性能,现说明如下:步进电机的细分控制是由驱动器精确控制步进电机的相电流来实现的,以二相电机为例,假如电机的额定相电流为3A,如果使用常规驱动器(如常用的恒流斩波方式)驱动该电机,电机每运行一步,其绕组内的电流将从0突变为3A或从3A突变到0,相电流的巨大变化,必然会引起电机运行的振动和噪音。
如果使用细分驱动器,在10细分的状态下驱动该电机,电机每运行一微步,其绕组内的电流变化只有0.3A而不是3A,且电流是以正弦曲线规律变化,这样就大大的改善了电机的振动和噪音,因此,在性能上的优点才是细分的真正优点。
由于细分驱动器要精确控制电机的相电流,所以对驱动器要有相当高的技术要求和工艺要求,成本亦会较高。
注意,国内有一些驱动器采用“平滑”来取代细分,有的亦称为细分,但这不是真正的细分,望广大用户一定要分清两者的本质不同:1.“平滑”并不精确控制电机的相电流,只是把电流的变化率变缓一些,所以“平滑”并不产生微步,而细分的微步是可以用来精确定位的。