2014年考研东南大学机械原理真题(回忆版)
《东南大学机械原理考研复习精编》

目录Ⅱ考前必知 (3)一、历年报录情况 (3)二、学费与奖学金 (4)Ⅲ复习方略 (5)Ⅳ考试分析 (7)一、考试难度 (7)二、考试题型 (7)三、考点分布 (9)四、试题分析 (10)五、考试展望 (11)Ⅴ复习指南 (13)Ⅵ核心考点解析 (26)《机械原理》 (26)绪论 (26)第一章平面机构的结构分析 (27)第二章平面机构的运动分析 (39)第三章平面连杆机构及其设计 (51)第四章凸轮机构及其设计 (62)第五章齿轮机构及其设计 (85)第六章轮系及其设计 (99)第七章其它常用机构 (109)第八章机械运动方案的拟定 (109)第九章平面机构的力分析 (110)第十章平面机构的平衡 (115)第十一章机器的机械效率 (127)第十二章机器的运转及其速度波动的调节 (130)Ⅶ往年真题试卷与答案解析 (136)往年真题试卷 (136)东南大学2007年招收硕士学位研究生入学考试试卷 (136)东南大学2008年招收硕士学位研究生入学考试试卷 (142)东南大学2009年招收硕士学位研究生入学考试试卷 (147)东南大学2010年招收硕士学位研究生入学考试试卷 (151)东南大学2011年招收硕士学位研究生入学考试试卷 (155)东南大学2012年招收硕士学位研究生入学考试试卷 (160)东南大学2013年招收硕士学位研究生入学考试试卷 (163)东南大学2014年招收硕士学位研究生入学考试试卷 (168)东南大学2015年招收硕士学位研究生入学考试试卷 (173)东南大学2016年招收硕士学位研究生入学考试试卷 (177)往年真题试卷答案解析 (183)东南大学2007年招收硕士学位研究生入学考试试卷答案解析 (183)东南大学2008年招收硕士学位研究生入学考试试卷答案解析 (196)东南大学2009年招收硕士学位研究生入学考试试卷答案解析 (208)东南大学2010年招收硕士学位研究生入学考试试卷答案解析 (219)东南大学2011年招收硕士学位研究生入学考试试卷答案解析 (228)东南大学2012年招收硕士学位研究生入学考试试卷答案解析 (238)东南大学2013年招收硕士学位研究生入学考试试卷答案解析 (244)Ⅱ考前必知一、历年报录情况注:东南大学机械工程(工业设计)、机械工程(工业工程)两个专业在2013年以前分别为工业设计、制造业工业工程专业。
机械原理习题及答案(1-1至4-3)
2-1 试求出下列图示机构中的全部瞬心。
2-2 图示铰链四杆机构中,已知:
l BC = 50 mm, lCD = 35 mm, l AD = 30 mm,AD为机架。
1. 2. 3.
若若若此此此机机机构构构为为为曲双双柄曲摇摇柄杆杆机机机构构,构,,求求且llAAABBB的为的最曲数小柄值值,范;求围l。AB
3-1 5-9 渐开线主动齿轮I逆时针转动,已知两轮的齿顶
圆 ra ,齿根圆 r f ,基圆 rb 以及中心距如图所
示。试在图上画出:
1)理论啮合线N1N2 ;
2)啮合开始点 B 2 及啮合
终止点 B 1 ,标出实
际啮合线;
' 3)啮合角 ,一对节圆,
注出其半径 r1 及 r2 ,
4)徒手画出在节点P啮合的一对 齿的齿廓工作段(用双线表示)。
2-3
1-4b (答案)
(答案a)(答案b)
1-4c (答案)
(答案c)(答案d)
(答案e)(答案f)
2-4 (答案a)(答案b)
3-1 (答案) 3-2(答案a)(答案b) 3-3 (答案)
2-5 (答案) 2-6答案 2-7答案
3-4 (答案)
(答案) (答案) (答案)
1-1 试画出下列各机构的运动简图, 并分别计算其自由度。
1-2b
解: 依次拆下6-7,4-5,2-3 三个II级组,故为II级机构。 C为复合铰链。
n 7 ,p L 1,0 p H 0 ,
F 3 7 2 1 1 0 .
1-3 图示椭圆画器机构, 已知AB=BC=BD, 试证滑块4对连杆CD的约 束是虚约束, 去掉构件4之后计算此机构的自由度。
机械原理考研真题(A卷)

A.互余
B.互补
C.相等
D.没关系
3.一对齿轮啮合过程中,下面关于节圆的说法错误的是
。
A.始终相切
B.始终通过节点
C.始终和分度圆重合
D.随中心距增大而增大
4.生产工艺要求某机构将输入的匀速单向运动,转变为按照正玄规律变化的移
动输出,一种可供选择的机构是
。
A.齿轮齿条机构
B.直动滚子从动件盘形凸轮机构
rb2 r2' ra2
图4
四、计算与综合题(本大题70分)
1、计算图 5 所示机构的自由度,若有复合铰链,局部自由度,虚约束请标出。(本 小题 10 分)
第3页共5页
B N
C
D
B
P
F
M
A
AB ∥= EF ∥= MN E
O
图5
2、如图 6 所示机构,已知 h 750mm , 1 20rad / s ,1=20 rad/s,用瞬心
功为零
二、判断题(本大题 10 小题,每题 2 分,共 20 分。正确的打√,错误
的打。)
1、机构的级别是由机构中包含最多的杆组的级别决定的。
()
2、四杆铰链机构中最短杆与最长杆之和<(或=)其它两杆之和时,一定有曲柄。( )
3、为减小直动尖顶从动件盘状凸轮机构压力角,凸轮的偏心距与推程时凸轮、推
9、 斜齿轮的当量齿数大于实际齿轮的齿数。
()
10、静平衡的刚性转子不一定是动平衡的,但是动平衡的刚性转子一定是静平衡
的。
()
三、分析与简答题(10 分4 小题 =40 分)
1、如图 2 所示曲柄滑块机构,曲柄 AB 等速整周回转,设曲柄为主动件。
(1)作图画出极位夹角 ,最小传动角 min 出现的位置。(5 分)
2013年东南大学《机械原理》考研真题(标准版)
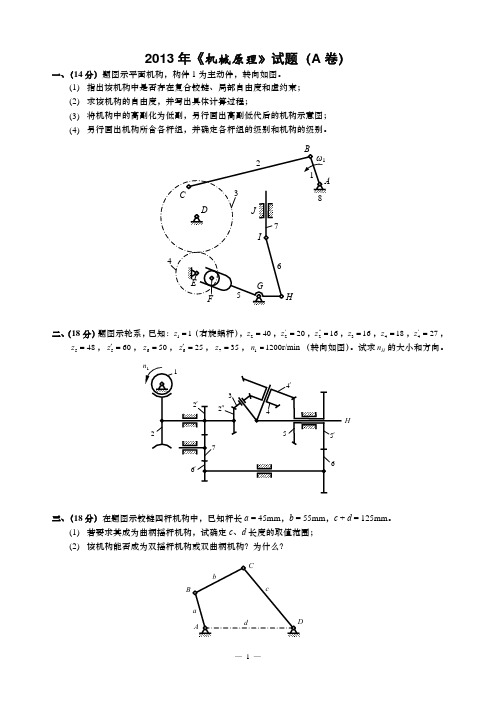
2013年《机械原理》试题(A 卷)一、(14分)题图示平面机构,构件1为主动件,转向如图。
(1) 指出该机构中是否存在复合铰链、局部自由度和虚约束;(2) 求该机构的自由度,并写出具体计算过程;(3) 将机构中的高副化为低副,另行画出高副低代后的机构示意图; (4) 另行画出机构所含各杆组,并确定各杆组的级别和机构的级别。
二、(18分)题图示轮系,已知:11=z (右旋蜗杆),402=z ,202=′z ,162=′′z ,163=z ,184=z ,274=′z ,485=z ,605=′z ,506=z ,256=′z ,357=z ,r/min 12001=n (转向如图)。
试求H n 的大小和方向。
三、(18分)在题图示铰链四杆机构中,已知杆长a = 45mm ,b = 55mm ,c + d = 125mm 。
(1) 若要求其成为曲柄摇杆机构,试确定c 、d 长度的取值范围; (2) 该机构能否成为双摇杆机构或双曲柄机构?为什么?H四、(16分)题图示一转子由两个互相错开90°的均质偏心轮1、2组成,每一偏心轮的质量均为m ,偏心距均为r 。
拟在平衡平面A 、B 上半径为2r 处分别添加平衡质量A b m )(和B b m )(,使该转子达到动平衡。
试求平衡质量A b m )(、B b m )(的大小和相应的方位角A b )(θ、B b )(θ。
五、(22分)题图(a)为一机械系统的等效动力学模型。
已知稳定运转时期一个运动周期内等效阻力矩M r 的变化规律如图(b)所示,等效驱动力矩M d 为常数,等效转动惯量为J = 1kg ⋅m 2(为常数),等效构件的平均转速为n m = 1500r/min 。
试求: (1) 等效驱动力矩M d ;(2) 等效构件的速度波动系数δ 以及等效构件的最高转速n max 和最低转速n min ;(3) 若要求等效构件的许用速度波动系数为[δ ] = 0.01,试求安装在等效构件A 轴上飞轮的最小转动惯量J F 。
2014机械原理

2014年机械原理回忆版真题1.问题和以前一样,不过没问关于瞬心求角速度比的问题。
求自由度、杆组、机构级别、高副低代2.轮系计算,电机M 转子相对于齿轮2 的转速n1000r / min ,Z4 94 ,轮系中只m有轮 1 的齿数没给,其余都给了(个轮具体齿数忘了)。
求:1)Z1? ,2)n6 转速?,3)n1 转速?3.平衡题m2=1kg,r2=140mm,m3=90kg,r3=4mm,m1,r1,θ1,θ2,θ3数值忘了。
轴转速n2000r / min .m求:1)A、B 的支座反力。
2)欲在平面I、II 上达到动平衡,求mI,θI,m II,θII.4.动力学模型如图,Md 为常数,Mr 如图,J=1.求:1)、Md?,2)S,n max ,n min ,3)、n m 600r / min ,J F ?5.这是关于齿轮变位后是零传动、正传动还是负传动的判断,一共三问,都很简单,以往没考过。
1)、a' 100,a a' ,z1=16,z2=18(这个数具体忘了),m=4,设计此轮系适合的传动类型?2)、Z1=12,Z2=20,中心距不限,m=4,设计此轮系适合的传动类型?3)、a' 100, i12 2.5,m=4,设计此轮系适合的传动类型?思路:X1≧(17 Z1)/17 ,X2≧(17 Z2)/17 ,然后比较一下,看看适合等变位零传动还是正传动或负传动,下面两题也是这个思路。
这一问答案是等变位零传动。
6.曲柄滑块,主要用瞬心做,这题的问题类型从未见过,好多人只做了前两问。
AB 杆角速度w1,a=e,λ=b/a=4,最大时,1 杆转动角度φ1,4)、求求:1)、θ?,2)H(用 a 表示),3)、VCmaxV Cm H /t m,t m为慢行程时间,用a表示V Cm ,5)知道V C max /V Cm的值,能求出a的值吗?思路:前两问不说。
第三问,找出1杆与滑块3的瞬心P13,并用其表示出Vc,后面的问题全部迎刃而解。
东南大学机械考研@东南机械原理13-15答案

写在前言:
以下的答案是我的一位同学在考前几天发给我的,由于之前13至15都没答案,有些题目做得稀里糊涂的。
作为过来人,我深知你们对答案的渴求,现在在你们刚准备考研时,我将他们整理好送给你们,也算是将传统发扬光大,希望你们好好珍惜,不要走我们所走过的弯路,最后祝各位2017的考研成功!努力吧,少年们!(个人对高价卖资料非常痛恨,群里的资料足够你用的了,希望你们不要花冤枉钱,这是学长发自肺腑之言。
当然,我也希望你们不要以此牟利。
)
13年答案:。
机械原理考研试题及答案

机械原理考研试题及答案题目:机械原理考研试题及答案一、选择题(每题2分,共10分)1. 下列关于机构自由度的计算公式中,正确的是()。
A. F = 3(n-1)B. F = 2nC. F = 3n - 2pD. F = n - p答案:C2. 在平面四杆机构中,若两连架杆长度相等,则该机构为()。
A. 双曲柄机构B. 曲柄摇杆机构C. 双摇杆机构D. 无法确定答案:A3. 齿轮的节圆是指()。
A. 齿轮上两个相邻齿廓的切线所形成的圆B. 齿轮上任意两个齿廓的公切线所形成的圆C. 齿轮分度圆与齿距圆之间的圆D. 齿轮上用于确定齿距的基准圆答案:D4. 机械系统动态静不平衡力是由于()。
A. 质量不均匀分布B. 齿轮啮合误差C. 轴承摩擦D. 轴弯曲答案:A5. 在凸轮机构中,推杆的位移规律取决于()。
A. 凸轮的轮廓曲线B. 凸轮的转速C. 推杆的质量D. 凸轮的材料答案:A二、填空题(每题2分,共10分)6. 机械效率是指_________与_________的比值。
答案:有用功;总功7. 齿轮的模数m=_________,其中d为分度圆直径,p为齿距。
答案:m = d / p8. 机械运动的基本形式包括_________、_________和平移。
答案:旋转;摆动9. 机械系统的速度波动可以通过_________来实现。
答案:飞轮10. 机械系统的等效力矩是指系统中所有力矩的_________。
答案:矢量和三、简答题(每题10分,共20分)11. 简述机械系统设计中的强度计算的重要性。
答案:机械系统设计中的强度计算对于确保机械系统在使用过程中的安全性、可靠性和经济性至关重要。
强度计算可以预测机械零件在工作载荷下是否会发生破坏,从而避免因零件失效导致的事故和损失。
此外,合理的强度计算还能优化材料使用,减少不必要的成本开支,提高机械系统的整体性能。
12. 描述凸轮机构的工作原理及其在机械中的应用。
2014年机械原理真题
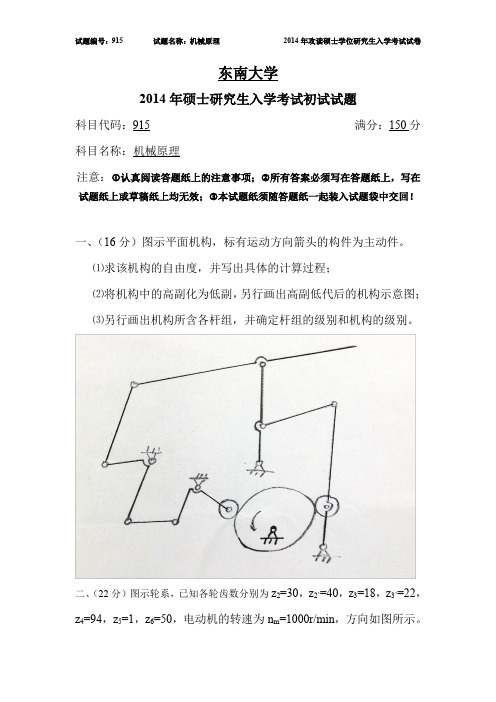
东南大学2014年硕士研究生入学考试初试试题科目代码:915满分:150分科目名称:机械原理注意:①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在试题纸上或草稿纸上均无效;③本试题纸须随答题纸一起装入试题袋中交回!一、(16分)图示平面机构,标有运动方向箭头的构件为主动件。
⑴求该机构的自由度,并写出具体的计算过程;⑵将机构中的高副化为低副,另行画出高副低代后的机构示意图;⑶另行画出机构所含各杆组,并确定杆组的级别和机构的级别。
二、(22分)图示轮系,已知各轮齿数分别为z2=30,z2’=40,z3=18,z3’=22,z4=94,z5=1,z6=50,电动机的转速为n m=1000r/min,方向如图所示。
试求⑴齿轮1的齿数z1;⑵齿轮6转速n6的大小和方向;⑶齿轮1转速n1的大小和方向。
三、(18分)图示回转件。
已知其上三个不平衡质量m1=1kg,m2=2kg,m3=4kg,质心至回转轴的距离r1=60mm,r2=140mm,r3=90mm,轴向及周向位置如图所示。
试求:⑴若回转件转速为n=600r/min.试求A,B处产生的支反力F RA、F RB;⑵为使回转件达到动平衡,在平面Ⅰ与Ⅱ上半径为r=100mm的圆周上加上平衡质量。
求所加的平衡质量m1、m2及方位θ1、θ2。
四、(16分)某一机械系统的等效动力学模型如图所示。
已知稳定运转时期一个运动周期内等效阻力矩的变化规律如图所示,等效驱动力矩M d为常数,等效转动惯量为J=1kg.m2(为常数),等效构件的平均转速为n m=2000r/min。
试求:⑴等效驱动力矩M d;和⑵等效构件的速度波动系数δ,以及等效构件的最高转速nmax最低转速n;min⑶若要求等效构件的许用速度波动系数为[δ]=0.02。
试求安装在等效构件上飞轮的最小转动惯量J F。
五、(14分)一对渐开线直齿圆柱齿轮,其中α=20°,h a*=1mm,说明下列采用什么传动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
资料来源:中国教育在线 /
资料来源:中国教育在线 / 第一题,很常规,考察机构中是否存在复合铰链,虚约束以及局部自由度,计算自由度,高副低代,画出个杆组以及确定机构的级别。
个人感觉不难。
第二题,第一问计算某齿轮的齿数,第二三问计算某轮的转速计转向(今年的是行星轮系,其中的行星排是是两个联动的,也就是四个齿轮组成的联动行星排,转向的判断有蜗轮蜗杆的)
第三题,平衡质量的计算,就是课本上第十章的内容,今年出的是不在同一个平面内的。
第四题,速度波动调节的那块儿,课本上第十二章的内容,个人感觉中规中矩,不难。
第五题,已知一堆齿轮的啮合角为20°,ha*=1,下面给定三种情况试设计其传动类型,并简述理由。
第一问给出齿数模数以及实际中心距。
第二问,给出齿数模数,实际中心距不限制,不好意思第三问忘了。
(吐槽下,此题坑爹!) 第六题,偏置曲柄滑块儿机构,给出连杆与曲柄的长度比为4,曲柄长与偏距比为1。
下面有6问,第一问是求极位夹角,第二问求滑块儿行程(用曲柄长度表示),后面的够忘了。
(严重吐槽下!试卷给的图上连杆长44mm ,曲柄长16mm !!!擦!)
第七题,平面铰链四杆机构的设计,比较灵活,考的是转换机架法的应用。
第八题,和往年一样,出的是凸轮机构的综合问题,是偏心圆盘摆杆机构,摆杆又是摆动滑块儿机构的主动件,与凸轮接触的是与摆杆焊接在一起的小球。
第一问,从这个接触点到另一个接触点凸轮转过的角度,滑块儿的位移。
第二问,推程角以为回程角,最大压力角。
第三问,滑块儿的两个极限位置。
第四问,给出各转动副处的摩擦圆,已知摩擦角为15°,画出各构件所受力的作用线。