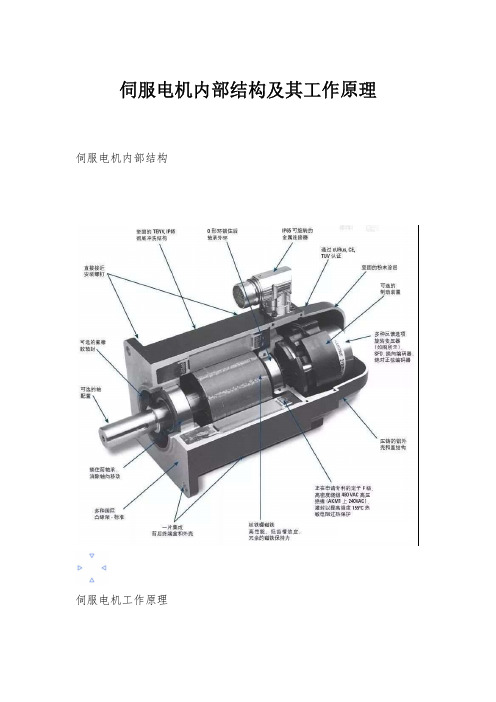
无槽式三相直流无刷伺服电机结构图
伺服电机内部结构及其工作原理

伺服电机内部结构伺服电机工作原理伺服电机原理一、交流伺服电动机交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。
目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。
当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性〔机械特性〕更接近于线性,而且具有较大的起动转矩。
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
2、运行范围较广3、无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。
当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性〔T1-S1、T2-S 2曲线〕以及合成转矩特性〔T-S曲线〕交流伺服电动机的输出功率一般是。
电机图片详解

三相异步电动机结构图
笼型转子
绕线型转子
LFChun 制作
附录2 异步电机图片
三相异步电动机结构图
LFChun 制作
附录2 异步电机图片
三相异步电动机结构图
接线盒 定LFChun 制作
附录2 异步电机图片
三相异步电动机的分体结构
LFChun 制作
附录2 异步电机图片
LFChun 制作
附录2 异步电机图片
SBA系列锥形转子电机
LFChun 制作
附录2 异步电机图片
异步电机
LFChun 制作
附录2 异步电机图片
异步电机
LFChun 制作
附录2 异步电机图片
异步电机
LFChun 制作
附录2 异步电机图片
JR2 系列三相异步电动机
LFChun 制作
附录2 异步电机图片
电子调速控制电动机
LFChun 制作
附录2 异步电机图片
异步电机铭牌
LFChun 制作
附录2 异步电机图片
阳罗电站 1800 kW(H)710 风机电机
LFChun 制作
附录2 异步电机图片
各种电机
LFChun 制作
1.2 物质的磁性能
3. 磁滞性 B的变化总是滞后于H的变化
剩 磁 矫顽磁力 B
定子铁心
LFChun 制作
附录2 异步电机图片
定 子
LFChun 制作
附录2 异步电机图片
定 子
LFChun 制作
附录2 异步电机图片
定子铁心片
LFChun 制作
附录2 异步电机图片
笼型转子
LFChun 制作
附录2 异步电机图片
无刷电机工作及控制原理(图解)

无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。
注意这里说的是“力矩”最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
伺服电机原理图

伺服电机原理图伺服电机是一种能够根据控制系统的指令,精确地控制位置、速度和加速度的电机。
其原理图如下所示:1. 电源模块,伺服电机的电源模块通常由直流电源和电源管理模块组成。
直流电源提供电能,而电源管理模块则用于管理电源的输入和输出,保证电机正常运行。
2. 控制模块,控制模块是伺服电机的核心部分,它包括控制器和编码器。
控制器接收来自控制系统的指令,然后通过编码器将指令转换成电机的运动控制信号,从而实现对电机的精确控制。
3. 传感器模块,传感器模块用于监测电机的位置、速度和加速度等参数,并将这些数据反馈给控制系统,以便控制系统能够及时调整指令,保证电机的运动精度和稳定性。
4. 电机模块,电机模块包括电机本身和驱动器。
电机是伺服电机的执行部分,它通过接收控制模块的控制信号,实现精确的位置、速度和加速度控制。
而驱动器则用于将控制模块的信号转换成电机所需的电流和电压,从而驱动电机正常运行。
伺服电机原理图所展示的各个模块之间密切配合,共同完成对电机的精确控制。
电源模块提供电能支持,控制模块接收指令并转换成控制信号,传感器模块监测电机的运动参数并反馈数据,电机模块则根据控制信号实现精确的运动控制。
这些模块相互作用,构成了伺服电机的整体工作原理。
除了以上所述的模块外,伺服电机的原理图还可能包括一些辅助模块,如温度传感器、过载保护模块等,用于进一步提高电机的性能和可靠性。
这些辅助模块的加入,使得伺服电机能够在更加苛刻的工作环境下稳定运行,为各种工业自动化设备提供了可靠的动力支持。
总的来说,伺服电机原理图所展示的各个模块协同工作,实现了电机的精确控制,为各种工业自动化设备提供了可靠的动力支持。
通过对伺服电机原理图的深入理解,我们能更好地了解伺服电机的工作原理和结构特点,为电机的选型、应用和维护提供有力的支持。
伺服电机内部结构及其工作原理
伺服电机内部结构及其工作原理伺服电机内部结构伺服电机工作原理1一、交流伺服电机交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.如图1所示其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,连接控制信号电压Uc。
所以交流伺服电动机又称两个伺服电动机。
图1 交流伺服电机原理图交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。
目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,如图2所示为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。
图2 空心杯形转子交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。
当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
图3伺服电动机的转矩特性2、运行范围较广如图3所示,较差率S在0到1的范围内伺服电动机都能稳定运转。
直流无刷电机PWM驱动芯片设计

方面伺服电动机占优,但在电机效率,速度,稳定性,最高转速方面两者相差不大。
最主要的是无刷电动机价格优势很大,要便宜1/3。 表1-1无刷直流电动机与异步电动机主要特性比较【2】
无刷直流电动机
异步电动机
转速范围Jr/mini 转速比
80.4000 1:50
200.2400 1:20
最大输入电流(惯性负载)
reliable operation.The motor with Hall position sensor is popular in the market.Tllis sensor is cheap but inaccurate in targeting location.In order to improve the control capacity of this
iIl 1 0V.-o.35岬BCD technology.
Keywords:motor driver IC:; BLDCM;MSL—PWM;PWM mode
量曼曼iI
西南交通大学硕士研究生学位论文
1
.--
第一章 绪论
I.I研究背景与意义
I第皇曼1曼页曼曼
节能减排是当下紧峻的问题,电机及其拖动系统是工业耗能设备中的主要环节,
1.2国内外研究现状分析
电机驱动的研究,调制方式最先是方波PWM调制,又从方波三三导通方式变化 到一般的正弦波PWM调制(SPWM),在到SPWM中加入不同谐波分量的调制,这引 入许多侧重点不同的正弦PWM调制,如马鞍波PWM调制,开关损耗最小(minimum switch losses)PWM调制(MSL.PWM),发展到现在常用的空间矢量调制(SV】?WM)。 正弦PWM调制是从电源的角度出发生成可调频调压的正弦波电源,而SVPWM则是 从磁链的角度,通过开关管的不同导通组合生成8个基本的空间电压矢量,利用电压 矢量形成实际磁链矢量,并追踪电动机定子的理想磁链圆轨迹。这两类调制之间存在 一定的联系和转换。相对来说,SVPWM更能降低电机转矩脉动,并提高直流母线电 压的利用率和易于数字处理。控制系统由最早的比例一积分一微分控制器(PD),到现在 智能控制系统,如神经网络,模糊控制【5~。对各种方式下的转矩波动都有学者进行了 深入的分析研究。
无刷电机内部结构及工作原理介绍
无刷电机内部结构及工作原理介绍
无刷电机内部结构及工作原理介绍
一,无刷电机内部结构图
以下这是上一期(电动车)直流无刷电机的原理与控制里的原理图,在这一期里着重介绍无刷电机的运行原理。
电机内部霍尔传感器的正电源线即红线一般接5-12v直流电。
而以5V居多。
霍尔的信号线传递电机里面磁钢相对于线圈的位置,根据三个霍尔的信号控制器能知道此时应该如何给电机的线圈供电(不同的霍尔信号,应该给电机线圈提供相对应方向的电流),就是说霍尔状态不一样,线圈的电流方向不一样。
二,无刷电机的运行原理
霍尔信号传递给控制器,控制器通过电机相线(粗线,不是霍尔线)给电机线圈供电,电机旋转,磁钢与线圈(准确的说是缠在定子上的线圈,其实霍尔一般安装在定子上)发生转动,霍尔感应出新的位置信号,控制器粗线又给电机线圈重新改变电流方向供电,电机继续旋转(线圈和磁钢的位置发生变化时,线圈必须对应的改变电流方向,这样电机才能继续向一个方向运动,不然电机就会在某一个位置左右摆动,而不是连续旋转),这就是电子换相。
如图所示
图1
图2
图3
图4
图5。
伺服电机基础知识
普通旋转伺服电机+齿轮机构
普通旋转伺服电机+同步带机构
直驱伺服电机的分类
➢ 直驱伺服电机按构造可分为三类
直线伺服电机的结构
➢ 直线伺服电机在动子线圈产生的磁场与定子永磁体磁场的相互作用下产 生持续的推力带动负载运动,配合外部光栅尺,具有高速,高定位精度、 洁净、静音、免维护等特点。
高速、高精度直线运动
15
普通旋转伺服、直驱伺服、直线伺服的应用领域分布
低惯量高分辨率 旋转伺服电机
中惯量高分辨率 旋转伺服电机
直线伺服电机 直驱伺服电机
中惯量低分辨率 旋转伺服电机
相对普通旋转伺服广泛的应用领域,直驱伺服和直线伺服主要应用于电子、液 晶、半导体生产等行业,精度高、稳定性好、易于维护的特点正迎合了这些行业普特点;以立式安装为主, 能承受较大的轴向力;直接驱 动负载进行圆周运动,无外部 机械传动部分,定位精度更高。
直驱电机的防护等级比旋转型低,需注意使用环境。
直驱伺服擅长驱动转台作高精度圆周运动
➢ 普通旋转伺服电机在驱动转台等惯量较大的负载进行运动时,一般都需要加 装减速机构(齿轮减速机构或同步带减速机构)等。
编码器电缆
减速机、联轴器等
按上位控制器的要 求,结合编码器信
3。电缆:信号电缆-------驱动器与上位控制器之间信号交互 主回路电缆-----驱动器向电机输出三相电(载波电压)
息向伺服电机输出 电能控制电机运行。
编码器电缆-----将编码器的位置和运动信息实时反馈给驱动器
注:信号与编码器电缆一般要求使用质量可靠的双绞屏蔽线。
直流电动机伺服系统概述
6.4 直 流 电 动 机伺 服系统
1)静态特性
一般励磁式直流电机的工作原理是建立在电磁力定律基础上,由励
磁绕组和磁极建立磁场,电枢绕组作为通电导体切割磁力线,产生电
磁转矩,转矩的大小正比于电机中气隙磁场和电枢电流,电磁转矩由
下式表示:
T CT Ia
(6-4)
式中:CT-转矩常数;
φ-磁场磁通;
在改变转速时,要求在速度指令发出后,电动机的转速能以最 大的加减速度达到新的指令速度值,在速度指令值不变时,要求电 动机速度保持恒定。直流伺服电动机的机械特性比较软,在外加电 压不变时,电动机的转速随负载的变化而变化。对电动机的调速, 要求在负载变化时或电动机驱动电源电压波动时保持电动机的转速 稳定不变。
6.4 直 流 电 动 机伺 服系统
1. SCR系统的组成 SCR调速系统组成框图如图6-29所示。 1)控制回路:速度环、电流环、触发脉冲发生器等。 2)主回路:可控硅整流放大器等。 3)速度环:速度调节。作用:好的静态、动态特性。 4)电流环:电流调节。作用:加快响应,启动、低频稳定等。 5)触发脉冲发生器:产生移相脉冲,使可控硅触发角前移或后移。 6)可控硅整流放大器:整流、放大、驱动,使电动机转动。
2. 性能特点与特性曲线 普通型大惯量宽调速永磁直流伺服电机的工作原理与一般励磁式
直流电机基本相同,但磁场的建立由永久磁铁实现,当电流通过电枢 绕组时,电流与磁场相互作用,产生感应电势、电磁力和电磁转矩, 使电枢旋转。永磁直流伺服电机特性原则上与一般直流电机相同,但 有很大的改进和变化,已不能简单的用电压、电流、转矩等参数来描 述,需用数据表和特性曲线来描述,使用时要查阅这些表和特性曲线 。
(6-6)
Ua Ce
伺服电机内部结构及其工作原理
伺服电机内部结构及其⼯作原理伺服电机⼯作原理伺服电机原理⼀、交流伺服电动机交流伺服电动机定⼦的构造基本上与电容分相式单相异步电动机相似.其定⼦上装有两个位置互差90°的绕组,⼀个是励磁绕组Rf,它始终接在交流电压Uf上;另⼀个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机⼜称两个伺服电动机。
交流伺服电动机的转⼦通常做成⿏笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,⽆“⾃转”现象和快速响应的性能,它与普通电动机相⽐,应具有转⼦电阻⼤和转动惯量⼩这两个特点。
⽬前应⽤较多的转⼦结构有两种形式:⼀种是采⽤⾼电阻率的导电材料做成的⾼电阻率导条的⿏笼转⼦,为了减⼩转⼦的转动惯量,转⼦做得细长;另⼀种是采⽤铝合⾦制成的空⼼杯形转⼦,杯壁很薄,仅0.2-0.3mm,为了减⼩磁路的磁阻,要在空⼼杯形转⼦内放置固定的内定⼦.空⼼杯形转⼦的转动惯量很⼩,反应迅速,⽽且运转平稳,因此被⼴泛采⽤。
交流伺服电动机在没有控制电压时,定⼦内只有励磁绕组产⽣的脉动磁场,转⼦静⽌不动。
当有控制电压时,定⼦内便产⽣⼀个旋转磁场,转⼦沿旋转磁场的⽅向旋转,在负载恒定的情况下,电动机的转速随控制电压的⼤⼩⽽变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的⼯作原理与分相式单相异步电动机虽然相似,但前者的转⼦电阻⽐后者⼤得多,所以伺服电动机与单机异步电动机相⽐,有三个显著特点:1、起动转矩⼤由于转⼦电阻⼤,其转矩特性曲线如图3中曲线1所⽰,与普通异步电动机的转矩特性曲线2相⽐,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,⽽且具有较⼤的起动转矩。
因此,当定⼦⼀有控制电压,转⼦⽴即转动,即具有起动快、灵敏度⾼的特点。
2、运⾏范围较⼴3、⽆⾃转现象正常运转的伺服电动机,只要失去控制电压,电机⽴即停⽌运转。
当伺服电动机失去控制电压后,它处于单相运⾏状态,由于转⼦电阻⼤,定⼦中两个相反⽅向旋转的旋转磁场与转⼦作⽤所产⽣的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)交流伺服电动机的输出功率⼀般是0.1-100W。