第四章 控制系统的时域分析
控制系统的时域分析

解:1)单位阶跃输入时
X 0s G sX iss2 s s 1 1 2 1 s s 1 1 2 s1 1
所以: x 0 t L 1 X 0 s 1 te t e t
2)单位脉冲输入时,由于 t d 1t
dt
所以: xotd dtxot2ettet
28
机械控制工程基础
§4.3 二阶系统的时间响应 一、二阶系统的数学模型
2 2 1( 2 1)
单调上升,无振荡, 过渡过程时间长,无 稳态误差。
18
机械控制工程基础
c(T)=1-e-1=0.632,即经过时间T,系统响应达到其 稳态输出值的63.2%,从而可以通过实验测量惯性环 节的时间常数T;
dc t 1
dt
T
t0
时间常数T反映了系统响应的快慢。通常工程中当响
应曲线达到并保持在稳态值的95%~98%时,认为系
统响应过程基本结束。从而惯性环节的过渡过程时间
26
机械控制工程基础
例1:单位脉冲信号输入时,系统的响应为:
x0t75e6t
求系统的传递函数。
解:由题意Xi(s)=1,所以:
GsXX0i ssX0sLx0tL75e6t 7ss56s2ss462
27
机械控制工程基础
例2:已知系统传递函数为:
G
s
2s 1
s 12
求系统的单位阶跃响应和单位脉冲响应。
12
机械控制工程基础
根据线性叠加原理,将0到t的各个脉冲的脉冲响应叠加, 则得到任意函数x(t)在t时刻的时间响应函数y(t)。
t t t t tt n
t
y (t) ln i m k 0x (k)g (tk)0x ()g (t)d
控制系统的时域分析

第四章 控制系统的时域分析
4. 3 控制系统的动态特性 一.动态性能指标
通常以系统单位阶跃输入时的响应来定义时域性能指标。 1.超调量——阶跃响应超过稳态值的最大值与稳态值之比 的百分数。下式中,c(tP ) 为输出响应的最大值;c() 为稳态值。
P
c(t P ) c() 100 % c()
2.延迟时间:响应曲线第一次达到终值一半所需的时间。
1
0.632
63.2%
86.5% 95% 98.2% 99.3%
0TLeabharlann 2T3T4T 5T t
这是一条指数曲线,t 0 处斜率最大,其值为1/T, 若系统保持此变化速度,在 t=T 时,输出将达到稳态值。 而实际系统只能达到稳态值的0.632, 经过3T或4T的时间 系统输出响应分加别达到稳态值的0.95或0.98。
3.峰值时间:对应于最大超调量发生的时间。
4.上升时间:动态响应曲线从零到第一次上升到稳态值所需
的时间。(若无超调量,取稳态值10-90%)
2
5.调整时间(又称过渡过程时间) :响应曲线达到并保 持与终值之差在预定的差值△内(又叫误差带 )所需要 的时间。一般取±2%或±5%。
c(t) 误差带 :0.05 或0.02
T
R( s ) s 2 1 s K
TT
10
R(s)
K s(Ts 1)
C(s)
K
( s ) C( s )
T
R( s ) s 2 1 s K
TT
令:
2 n
K T
2 n
1 T
则 二阶系统标准式:
( s )
s2
2 n
2
n
s
2 n
控制系统的时域响应分析

控制系统的时域响应分析
控制系统是指将环境及机器内部参数调节到所需状态的系统,它通过检测及控制参数的变化来实现控制的目的,稳定状态,使之不受外界参数的干扰。
控制系统的时域响应分析,是指控制系统对系统参数和环境影响做出的时间分布响应。
时域响应分析可以根据控制系统的结构特征和实现方式来进行,具体可以分为三类:一是闭环响应分析,在这种情况下,系统中的输出经过一定的误差修正后,又会作为输入反馈回系统,实现系统本身的稳定性。
二是开环响应分析,在这种情况下,系统的输出受到输入的影响,但没有反馈回系统,因此,系统不能自行稳定,而只能在输入变化的情况下,通过外部调节来实现。
第三是多参数响应分析,在这种情况下,控制系统不仅考虑输入和输出,还考虑参数的变化,对待调参数进行调节。
一般来说,控制系统的时域响应分析可以包括系统的调节时间、调节准确度、均衡时间等。
调节时间,指的是控制系统输出参数达到稳定态所需要的时间,它可以反映出控制系统的稳定性。
控制系统时域分析
控制系统时域分析控制系统是指由各种元件和装置组成的,用于控制、调节和稳定各种过程的系统。
在控制系统的设计和分析中,时域分析是一种常用的方法。
时域分析可以通过考察系统输出信号在时间上的变化来评估系统的性能和稳定性。
本文将介绍控制系统的时域分析方法及其在工程实践中的应用。
1. 时域分析的基本概念时域分析是指通过观察系统输入和输出信号在时间轴上的波形变化,来分析控制系统的性能和特性。
在时域分析中,常用的指标包括系统的响应时间、稳态误差、超调量、振荡频率等。
2. 系统的单位阶跃响应单位阶跃响应是指将系统输入信号设置为单位阶跃函数,观察系统输出信号的变化。
单位阶跃响应可以反映系统的动态特性,包括系统的稳态响应和暂态响应。
通过观察单位阶跃响应的波形,可以评估系统的超调量、上升时间、峰值时间等性能指标。
3. 系统的单位脉冲响应单位脉冲响应是指将系统输入信号设置为单位脉冲函数,观察系统输出信号的变化。
单位脉冲响应可以用来确定系统的传递函数和冲激响应。
通过观察单位脉冲响应的波形,可以计算系统的阶跃响应和频率响应等特性。
4. 系统的稳态误差分析稳态误差是指系统输出信号与期望输出信号之间的偏差。
稳态误差分析是用来评估系统在稳态下的性能。
根据系统的稳态误差特性,可以对系统进行进一步的补偿和优化。
通常,稳态误差可以通过单位阶跃响应和传递函数来计算。
5. 系统的波形分析波形分析是指通过观察系统输入和输出信号的波形,来分析系统的性能和特性。
波形分析可以帮助工程师判断系统是否存在超调、振荡和阻尼等问题,从而进行相应的调整和改进。
6. 控制系统的频域分析虽然时域分析是评估控制系统性能的常用方法,但有时候需要使用频域分析来更全面地了解系统的特性。
频域分析可以通过考察系统的频率响应函数来评估系统的稳定性和抗干扰性能。
常见的频域分析方法包括傅里叶变换、拉普拉斯变换和频率响应曲线等。
总结:时域分析是控制系统设计和分析中重要的工具之一。
通过观察系统输入和输出信号在时间上的变化,可以评估系统的性能和稳定性。
控制系统的时域分析
2.劳斯表某行全为零.
s 10s 16s 160 0 例 3-5系统特征方程 列劳斯表 s3 1 16 s 2 10 160 辅助多项式P( s ) 10s 2 160 s1 0 0 s 1 20 0 s 0 160 劳斯表中第一列元素符号没有改变,系统没有右半平 面的根,但由P(s)=0求得
21
3.1.5 相对稳定性和稳定裕量
相对稳定性即系统的特征根在s平面的左半平面且 与虚轴有一定的距离,称之为稳定裕量。 为了能应用上述的代数判据,通常将s平面的虚轴 左移一个距离δ ,得新的复平面s1,即令s1=s+δ 或 s=s1-δ 得到以s1为变量的新特征方程式D(s1)=0, 再利用代数判据判别新特征方程式的稳定性,若新特 征方程式的所有根均在s1平面的左半平面,则说明原 系统不但稳定,而且所有特征根均位于-δ 的左侧,δ 称为系统的稳定裕量。
19
由于特征方程缺项,由劳斯判据知,不论K1 ,K2 , K3 和T取何值系统总是不稳定的,称为结构不稳定系 统。欲使系统稳定,必须改变系统的结构。如在原系 统的前向通道中引入一比例微分环节,如图3-4所示。 变结构后系统的闭环传递函数为
K1 K 2 K 3 (s 1) C ( s) 2 R( s) s (Ts 1) K1 K 2 K 3 (s 1)
r (t ) R t 0 0 t 0
r(t) R t
R=1时,称为单位阶跃函数,记为l(t) 。R(S)=1/S
2.斜坡函数(匀速函数)
r (t ) Rt 0 t 0 t 0 1 S2
r(t)
Rt
R=1时,称为单位斜坡函数。 R ( S )
t
r(t)
3.抛物线函数(匀加速函数)
控制系统的时域与频域分析及应用研究
控制系统的时域与频域分析及应用研究控制系统的时域与频域分析是控制工程中的两个重要方面,它们为我们研究和设计控制系统提供了强大的工具。
本文将探讨控制系统的时域与频域分析的基本概念、方法和应用,并讨论它们在实际工程中的重要性。
控制系统的时域分析是对系统在时间域内的行为进行分析和研究。
时域分析的主要目标是研究系统的稳定性、响应速度和稳态误差等特性。
在时域分析中,我们通常关注系统的脉冲响应、阶跃响应和频率响应等。
通过对这些响应的分析,我们可以了解系统对输入信号的处理方式和输出响应的特点。
时域分析的基本方法包括传递函数法、状态空间法和信号流图法等。
其中,传递函数法是最常用的方法之一。
它通过求解系统的传递函数,将输入信号和输出响应之间的关系用数学表达式表示出来。
传递函数法可以帮助我们分析系统的稳定性、零极点分布和频率响应等重要特性。
另外,状态空间法可以帮助我们直观地理解系统的动态特性,以及对多输入多输出系统进行分析和设计。
信号流图法则可以帮助我们将系统的结构图形象地表示出来,从而更好地理解和分析系统的性能。
除了时域分析,控制系统的频域分析也是十分重要的。
频域分析是通过将系统的输入和输出信号转换为频率域内的频谱图来研究系统的动态特性。
频域分析的主要目标是研究系统的频率响应、幅频特性和相频特性等。
在频域分析中,我们可以使用频率响应法、傅里叶变换法和拉普拉斯变换法等方法来分析系统。
其中,频率响应法是最常用的分析方法之一。
它通过将系统的输入和输出信号的频谱进行比较,得出系统的幅度响应和相位响应。
频率响应法可以帮助我们分析系统的频率特性,如共振频率、带宽和滤波特性等,从而指导系统的设计和优化。
控制系统的时域与频域分析在实际工程中具有广泛的应用。
首先,时域分析可以通过对系统的阶跃响应进行研究,帮助我们评估系统的稳态误差和响应速度,从而指导系统的控制策略和参数调节。
其次,频域分析可以通过对系统的幅度响应和相位响应进行研究,帮助我们评估系统的稳定性和抑制高频噪声的能力。
第四章控制系统的时域分析(2)

例: 已知系统的特征方程式为
S 3 2S 2 S 2 0
试判别相应系统的稳定性。 解:列劳斯表
S3 S2 S1 S0 1 2 0( ) 2 1 2
由于表中第一列E上 面的符号与其下面系 数的符号相同,表示 该方程中有一对共轭 虚根存在,相应的系 统为不稳定
劳斯表中出现全零行
线性系统稳定的充要条件是闭环特征方程式的根 必须都位于S的左半平面。能否找到一种不用求 根而直接判别系统稳定性的方式,称为稳定判据。 劳斯稳定判据就是这种间接的方法(不用直接求 根,因为求根很复杂),它是由劳斯于1877年 首先提出的。
劳斯表
令系统的闭环特征方程为
a0 0
a0 S n a1S n1 a2 S n2 an1S an 0
对系统进行各类品质指标的分析也必须在系统稳 定的前提下进行。 稳定是控制系统能够正常运行的首要条件。
–
分析系统的稳定性问题。 提出保证系统稳定的措施。
4.5.1 稳定的基本概念和系统稳定的充 要条件
有关稳定性的定义和理论较多。 ⑴控制系统稳定性的严格定义和理论阐述是由俄国学者李 雅普诺夫于1892年提出的,它主要用于判别时变系统和 非线性系统的稳定性。 ⑵设一线性定常系统原处于某一平衡状态,若它瞬间受到 某一扰动作用而偏离了原来的平衡状态,当此扰动撤消 后,系统仍能回到原有的平衡状态,则称该系统是稳定 的。反之,系统为不稳定。由此可知:线形系统的稳定 性取决于系统的固有特征(结构、参数),与系统的输 入信号无关。
劳斯表
设系统特征方程式如 下
a0 S n a1S n1 a2 S n2 an1S an 0
ghx第四章 线性控制系统的时域分析(三)
核心思想:忽略次要因素,降阶
K g ( s zk )
m k 1 n2
bm s bm1s b0 an s n an 1s n 1 a0
(s p ) (s
l 1 l l 1
n1
, nm
2
2 ll s l2 )
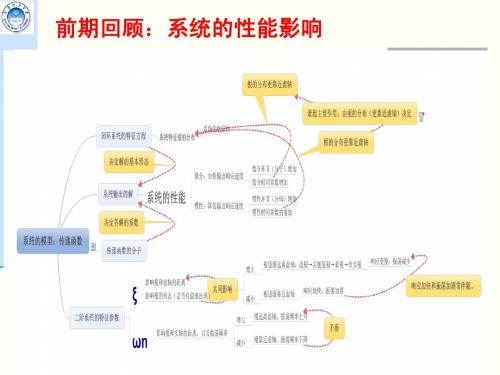
前期回顾:系统的性能影响
上节回顾:利用系统结构参数与特征参数 之间关系改善性能
R(s )
K1 T1s 1
K2 s
Y (s ) R(s )
K1 T1s 1
Y (s ) K2 T2 s 1
R(s )
K1 T12 s 2 2 1T1s 1
Y (s )
Y ( s) K 2 2 R( s) T s 2Ts 1
D(s)
1 1 y (t ) (1 ent sin d t arccos Kc Kh 1 2
ymax
B1
1 Kc K h
n
z1 1 2
B3
ent sin d t ) (4-67)
0
t
4.5 高阶系统的时域分析
T (s) Y ( s) R( s)
1.2
阶跃响应曲线,分析主 导极点影响。
1.0
9
y(t)
解:利用MATLAB仿真得到 阶跃响应曲线,如图4-22所示。 当>5时,随着远离虚轴,非 主导极点的影响逐渐减小。
0.8
3
0.6
1
5
0.4
7
0.2
0
2
4
6
8
10
12
t /T
4.6 稳态误差分析:控制系统的类型
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0.707 4.3%
0.8 1.5%
0.9 0.2%
37.2%
4.调整时间 : 当输出 与稳态值 之间的偏差达到 稳态值的 或 ,且以后不再超出此范 围所需的最小时间 (±5%的偏差范围)
(±2%的偏差范围)
与 后, 成反比,但阻尼比由超调量确定 决定了 的大小
5.主要参数与系统动态性能的关系
平稳性:对应的性能指标是最大超调量,
0
1
2
3
4
5
6
7
8
9
10
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
0
1
2
3
4
5
6
7
8
9
10
三、动态性能指标
二阶欠阻尼系统,在其单位阶跃响应上定义 系统的动态性能指标
单位阶跃响应:
单位阶跃响应的波形图
稳态值
单位阶 跃输入
误差容许
范围±2% 或±5% 上升时间 峰值时间
主要由系统参数中的阻尼比决定,阻尼比越 大,超调越小,系统越平稳;
快速性:对应的性能ቤተ መጻሕፍቲ ባይዱ标是调整时间,在
阻尼比一定时,主要由自然振荡频率决定, 越大, 将越小,系统的快速性也越好。
系统的平稳性和快速性不可能同时达到最
佳状态,两者是相互矛盾的。工程上常取 ,作为设计依据,是系统超调 和调整时间最理想的状态。
20
25
30
3.临界阻尼:
特征根是一对相等的实根:
系统的单位阶跃响 应是单调变化的
Step Response 1 0.9 0.8 0.7 0.6
Amplitude
0.5 0.4 0.3 0.2 0.1 0
0
0.5
1
1.5 Time (sec)
2
2.5
3
4.过阻尼: 特征根是一对不相等的根:
系统的单位阶跃响 应动态响应与一阶 系统类似
调整时间
1.上升时间 : 输出响应从0上升到第一次到达稳态值的时间。
当阻尼比 不变时,阻尼角 就不变。此时 若增大自然振荡频率 ,即增大闭环极点到 虚轴的距离 ,将导致上升时间 缩短, 从而加快系统的响应速度;而当阻尼振荡频率 不变时,阻尼比越小,上升时间越短
过阻尼系统不存在超调,取输出响应在稳 态值的10% ~ 90%的一段时间作为上升时间。
阻尼振荡频率:
时的单位阶跃响应曲线:
2 1.8 1.6 1.4 1.2
0; 0.1; 0.3; 0.5; 0.7; 0.9;1; 2.5
y(t)
1 0.8 0.6 0.4 0.2 0 0 1 2 3 4 t(sec) 5 6 7 8
在(0,1)之间取值时,阻尼比越大, 首个振荡的振幅就越小。
当ζ >>1时,闭环极点s1将比s2到虚轴的 距离远的多,包含s1的项要比包含s2的项衰 减快得多,所以s1对系统过渡过程的影响要 比s2的影响小的多,因此可以忽略s1对系统 将二阶系统近似作为一阶系统处理: 的影响,
二阶对象的近似及其特性考察
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
2.峰值时间 : 系统输出第一次达到峰值所花费的时间。
与
越大,
成反比,当阻尼比
越小
一定时,
3.最大超调量 : 系统响应的最大值超出系统稳态值的百分比。
超调量仅由阻尼比决定,两者呈反比关系, 阻尼比越大,超调量越小。
常用阻尼比与对应的超调量:
0.3 0.4 25% 0.5
16.3%
0.6 9%
0.68 5%
第四章 控制系统的时域分析
第5小节 二阶系统的时域分析
一、二阶系统的典型结构
开环传递函数为:
闭环传递函数为:
多项式形式
时间常数形式
系统的特征方程: 系统的2个特征根: 两个参数: 系统的阻尼系数,也称为阻尼比: 系统的自然振荡频率: 系统的时间常数:
二、阻尼比、特征根与单位阶跃响应
1.欠阻尼: 特征根是一对共轭的复极点: 阻尼角:
之后,系统的振荡基本消失,
响应呈单调上升的形式。
2.无阻尼: 特征根是一对纯虚根: 系统的单位阶跃响 应是不衰减的等幅 振荡,系统是临界 稳定的
Step Response
2 1.8 1.6 1.4 1.2
Amplitude
1 0.8 0.6 0.4 0.2 0 0 5 10 15
Time (sec)