激光半主动制导炮弹的作战效能评估仿真
激光制导武器半实物仿真系统的分析与实现

信息H程激光制导武器半实物仿真系统的分析与实现刘聪,张洋(中国飞行试验研究院,陕西西安,710089)摘要:首先,对于激光制导武器半实物仿真系统的设计是建立在激光制导弹药的背景下,阐明了激光制导武器半实物仿真系统的实验目标与内容,并介绍了激光制导武器的功能定位以及组成架构;其次,在室内半实物仿真环境下,基于激光制导武器中引导头的光学特性及制导与控制原理,设计出激光制导武器半实物仿真系统架构;最后,设定两种初始条件,进行仿真实验对比,查证结果显示建立在该导引头及角速率陀螺的控制系统上,能够使激光制导武器的精准度得到进一步提升。
关键词:激光制导;半实物仿真;精准度;光学特性0引言半实物仿真系统是用于弹上部件引入仿真回路,并为其模拟出真实的应用场景的仿真方法,除实物外,以数学模型进行仿真。
半实物仿真系统能够有效解决建模困难的问题,且具备较高的仿真置信度,能够为技术决策提供丰富可靠数据资源。
因此,半实物仿真方法是激光制导武器系统设计与开发中必要的性能评价手段与建造工具,科学应用于系统的设计、研制、评估等各个阶段。
目前,全球科技与军事力量都在不断强化,对于制导武器的开发水平也随着仿真技术的发展而快速提升,为提升我国武器装备的仿真实验技术,必须针对激光制导武器的半实物仿真平台进行科学研究与战略开发。
1制导系统半实物仿真试验的目的和内容对激光制导武器进行半实物仿真试验是为了利用仿真打靶的手段,将对弹的激光制导武器的制导部件与各部系统性能进行考核,保证制导精确度与系统动态性能,为激光武器的性能评判提供数据依据。
关于稳定回路,关键是对自动驾驶仪中所涉及到的惯性器件与控制电路进行考核,关于舵机回路,关键是对其静态与动态特性对激光制导系统精准度与性能产生的影响进行考核;关于引导回路,关键是对导引头上的探测器进行非线性特征检测与目标跟踪特性检测,以此保证激光制导武器动态性能的质量与精准度的控制。
制导武器半实物仿真系统的展开依据是按照由开环至闭环、由部分至整体、由小回路至大回路的标准E。
无人机辅助照射下舰炮制导炮弹对岸攻击效能评估
e f c i e e s o h r wa d g n ie a t c e y b s sd t . tc n p o i e a r f r n e t mp o ec mb t a a i t . fe t n s fs o e r u fr t k d b a i a a I a r v d e e e c i r v o v a o a p b l y c i Ke wo d : v lg n; h r wa d g n r t c ; y r s Na a u S o e r u f e a t k UAV; fe tv n s v l a i n i a Ef c i e e se a u to
为提 高舰 炮作 战 能 力提供 参 考 。
关键 词 :舰 炮 ;对 岸火 力 攻击 ;无 人机 ; 效 能评估 中图分 类号 :O19 V 7 5; 29 文献标 识 码 :A
E f ci e e sEv l ai no h r wadAt c yNa a nUsn i e r jci fe t n s au to fS o e r t kb v l v a Gu igGud dP oe tl e
摘要 :分析舰炮使用激光半主动末制导炮弹对岸火力攻击的优缺点 ,对克服缺点提 出可能的解决途径。建立无
人机 辅助 照 射 下舰 炮使 用 激光 半 主动 制导 炮 弹对 岸 火 力攻 击 效 能评估 的指标 体 系。运 用层 次 分析 法 ( AHP)和模 糊 综合 评估 法 ,评 估 火 力攻 击 的效 能 。该 方 法可对 影 响舰 炮 对 岸火 力 攻击 作 战效 能发 挥 的各 因素进 行 定量 分析 比较 ,
激光半主动制导武器作战配置建模与仿真
目前 , 国 内在 激 光 半 主 动 制 导 武 器 作 战 配 置 方 I , 引 吾 激光 制 导 武 器 主 要 担 负 边 防海 防、 近 空支 援 、 封
锁、 压制 与 防空 等作 战任 务 , 典 型激 光 半 主 动 制 导
面, 尤 其 在 指 目/ 弹 目距 离 、 视 线 夹 角 等方 面 的研 究 ,
大 多数 以定性 方 式 给 出 了激 光 制 导 武 器 作 战运 用 的
方法 和规 律 , 缺少定 量描 述 和推 导 。文 中 以地 面激 光 目标 指示 器 照 射 大 目标 ( 激 光 光 斑 尺 寸 小 于 目标 尺 寸) , 空基 发射 激光 制导 武器 的方式 为研 究对 象 , 分 析
XI A Xi n g y u, W ANG Gu o mi n, L I We ns h e ng, HAN S hu a i t a o
( N o . 6 3 8 9 3 U n i t , H e n a n L u o y a n g 4 7 1 0 0 0, C h i n a )
中 图分 类 号 :ห้องสมุดไป่ตู้T J 7 6 5 . 3 3 2 文 献 标 志码 : A
Mo d e l i n g a n d S i mu l a t i o n o f S e mi - a c t i v e La s e r - - g u i d e d
激光半主动制导炮弹的作战效能评估仿真

应平 行 。 3)速度 坐标 系 Of— 坐标 原 点 oc为弹 丸 质 心 , 轴 与 速 度 重
合 ,指 向一 致 O,y,轴在 铅直轴 构成 右手 直角 坐标 系 。
trajectory errors and find out influence reason that affects cannon firing accuracy,founding probability models of destroying and applying Monte Carlo simulation technique in laser guided projectile to raise the
号 C
目标 D
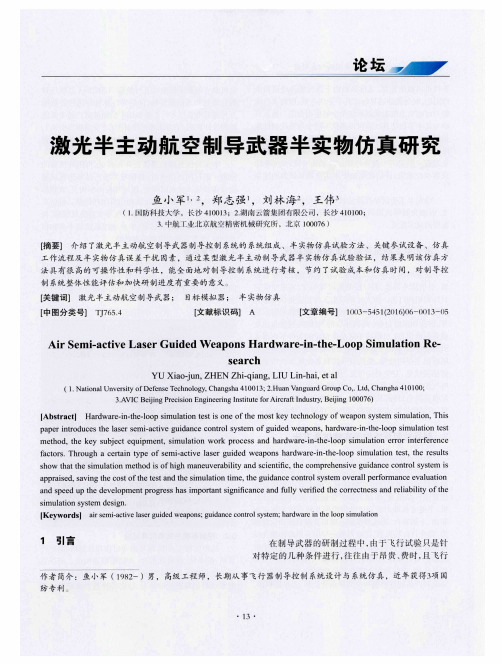
圈 1 激 光半 主 动 制 导 炮 弹 飞 行 弹 道 示 意 图
2.1 四 自由度弹 道模 型 采用 的坐标 系 1)地 面坐 标 系 0一xyz 坐标 原 点 0 为 炮 口 中心 ,Ox轴 为 射 面 与 水 平
面 的 交 线 ,射 击 方 向 为 正 ;oy轴 在 射 面 内 垂 直 Ox
launched guidance system on the basis of unguided trajectory,there are errors in cannon firing,and the
errors increase with the firing distance. In this article we wil1 analyze the characteristics of guided shell
cannon firing efficiency.
Key words:guided shell,firing efficiency,trajectory,assesments of operational effectiveness
激光半主动制导武器半实物仿真系统研究
激光半主动制导武器半实物仿真系统研究发布时间:2022-07-27T05:13:09.880Z 来源:《中国科技信息》2022年第6期作者:赵洋[导读] 本文研究了激光半主动制导武器半实物仿真试验系统,介绍了激光半主动制导半实物仿真的试验目的和功能,赵洋江南机电设计研究所贵阳 550009摘要:本文研究了激光半主动制导武器半实物仿真试验系统,介绍了激光半主动制导半实物仿真的试验目的和功能,对激光目标模拟系统及其分类进行了描述,介绍了激光半主动制导武器半实物仿真的系统组成、结构和仿真试验流程。
关键词:激光半主动制导;半实物仿真;仿真系统1引言激光制导作为一种先进的制导技术,因激光方向性强、波束窄、发散角小、不容易受外界干扰等特点,故具有极高的抗干扰性,制导精度高。
半实物仿真是工程领域一种应用广泛的仿真技术,将部分实物引入仿真回路,提高仿真置信度,减少实物建模难度,降低成本并缩短武器研制周期。
激光制导半实物仿真系统是激光制导武器研制的一种试验手段和支撑环境,可扩展成多功能、可重复、可控制的实验室“靶场”,是提高产品设计可靠性和研制质量的必要手段。
2激光制导半实物仿真的试验目的和功能2.1激光制导半实物仿真试验目的激光制导半实物仿真的试验目的是:依据对激光半主动制导武器性能的要求,为制导控制律设计提供依据,检验制导控制系统软硬件实现的正确性,验证激光半主动制导控制系统的稳定性、鲁棒性,验证各项指标能否达到总体技术要求。
半实物仿真作为进靶场之前的最后关卡,通过仿真打靶对激光制导武器的制导部件与子系统性能进行考核,保证制导精度与系统动态性能,为武器性能评判提供部分依据。
2.2激光制导半实物仿真的功能半实物仿真以控制论、系统论、相似原理等为基础,具有安全、高效、可控、不受环境气候限制等特性。
参照其相似性原理,激光制导半实物仿真系统具有以下三点功能:第一,模拟真实弹体的姿态与运动轨迹;第二,为制导武器提供激光照射环境,计算并模拟目标物体运动;第三,接收弹上计算机信号指令,实现六自由度弹道模拟。
激光半主动航空制导武器半实物仿真研究
【 中图分类号] T J 7 6 5 . 4
[ 文献 标识码】 A
【 文章 编号】 1 0 0 3 — 5 4 5 1 ( 2 o 1 6 ) n 6 一 l l f 】 1 3 - o 5
Ai r Se mi — a c t i v e La s e r G ui de d W e a po ns Ha r d ቤተ መጻሕፍቲ ባይዱa r e — i n — t he - Lo o p Si mu l a t i o n Re -
pa p e r i n t r o d u c e s t he l a s e r s e mi — a c t i v e g ui d a n c e c o n t r o l s ys t e m o f g u i d e d we a p o n s , ha r d wa r e — i n — t h e — l o o p s i mu l a t i o n t e s t
3 . A VI C B e i j i n g P r e c i s i o n E n g i n e e r i n g I n s t i t u t e f o r Ai r c r a t f I n d u s t r y , B e i j i n g 1 0 0 0 7 6 1
f a c t o r s . Th r o u g h a c e r t a i n t y pe o f s e mi — a c t i v e l a s e r g ui d e d we a p o ns h a r d wa r e — i n — t h e — l o op s i mu l a t i o n t e s t ,t h e r e s ul t s s h o w t h a t t h e s i mu l a t i o n me t h o d i s o f h i g h ma n e u ve r a b i l i t y a n d s c i e nt i ic f , t he c o mp r e h e ns i v e g u i d a n c e c o n t r o l s ys t e m i s
激光制导武器系统作战效能分析

般 都假设 故 障 和维 修 服从 指数 分 布 。根 据 可 靠 性
理论 可得 :
单 发导 弹对 目标 的毁伤 概率 为 :
r -。 r r o 1。 — — + 。
“ M B MTT ( —T + 丽 R F
,
3 ’ ) ’
() 4 、
() 5
*
收 稿 日期 :0 0年 8月 7日 , 回 E期 :0 0年 9 9日 21 修 t 21 月
作者 简介 : 韩磊 , , 男 硕士研究生 , 研究 方向 : 电子设备维 修。
4 6
韩
磊等 : 光 制 导 武器 系统 作 战效 能 分 析 激
总第 19 9 期
毁 伤 目标的 概率 作 为 系 统 能 力量 度 。这 时 系统 的
由于现装 备 的激 光制 导武 器多 为半 主 动式 , 所
以这里 主要 研 究 激 光 半 主 动 制导 武 器 。激 光 半 主 动制 导武 器 的导 引头 接 收 到 的激 光 功率 可 以用 公
式 () 9 表示 :
一
障 ;。 d, 为系统 在 开 始 执行 任 务 时处 于第 i 状 态 , 种
经 常用接 收机 信 噪 比的统 计 特 性 作 为 判据 。其输
入功率 信 噪 比概率 密度 函数 为 :
1 /1 、 一
\工 ,
P
图 1 武 器 系 统 的 可 靠 性 方 框 图
一圭 ep 兰 ) ( 三 ) x ( 三0 =
正
(0 1)
式 中 , 是 输 入 信 号 的 功 率 信 噪 比 S 是 z NR ,
hi - e e iin r que y l s ri t r e e eon t e a i f e tve es fw e p ys e sw a t id. gh r p tto f e nc a e n e f r nc heop r ton e f c i n s o a on s t m s s ude
激光半主动制导炮弹的作战效能评估仿真

( 中国兵器工业系 统总体部 , 北京 100089) 摘 要 : 激光半主动制导炮弹是 在无控弹道的基础上 增加末端制导段 , 属于远程间 瞄武器 , 射击 时是有误差的 , 而且误差 随射击距离显著增加。通过分析制导炮弹弹道误差特性 , 考察影响射击精度的主要因素 , 建立毁伤概率模 型 , 通过蒙特卡洛法 仿真激光制导炮弹对目标的射击效率。 关键词 : 制导炮弹 , 射击效率 , 弹道 , 效能评估 中图分类号 : T P 202. 2 文献标识码 : A
于最大射程 , V 减小, 否则, V 增大, 一直调整到 X 2 为最大射程, 此时 V 为等效初速。对应弹丸初速为 V , 射击距离在远距离分为内每隔一定射角 计算 一个射程 d 、 弹丸飞行时间 t1 , 确定一系列表尺值所 相应的距离和时间, 保存该计算结果。
3 仿真模型
3. 1 发射平台的仿真 本仿真对炮兵连阵地配置的仿真采用单门炮发 射单个激光制导炮弹。 3. 2 弹丸飞行时间的预测 利用弹道方程结果计算射击点为 ( X 2, Y 2 , Z 2 ) 的弹丸飞行时间 t 1。炮弹发射时刻为 T 0, 则炮弹飞 行结束的时间为 : t= T 0 + t1 3. 3 目标未来点预测 X 2 = X 2+ V X ・ ( t - t 0) Y′ 2= Y 2+ V Y ・ ( t - t 0)
L 2 = 2 ・D ・t an
1Leabharlann 利 用地 理信息系 统计算 ( X 4 , Y 4 ) 对应的 高程 Z 4。利用射表计算射击点为( X 4 , Y 4 , Z 4) 的弹道初始 射角 , 方位角 。 3. 7 制导段仿真 1) 近程仿真 ( 末制导段) : 利用弹道方程计算弹 丸 与最终落点( X 4 , Y 4 , Z 4 ) 之间距离 D 取 2 500 m 时刻的弹道倾角 和时刻 t 。 2) 远程仿真( 惯性制导段、 末制导段) : 计算非制 导段结束时刻 t 2、 位置( X , Y , Z ) 和速度 V , 条件为倾 角 0 为 30° 。 设陀螺在垂直平面的漂移速度为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L 2 = 2 ・D ・t an
1
利 用地 理信息系 统计算 ( X 4 , Y 4 ) 对应的 高程 Z 4。利用射表计算射击点为( X 4 , Y 4 , Z 4) 的弹道初始 射角 , 方位角 。 3. 7 制导段仿真 1) 近程仿真 ( 末制导段) : 利用弹道方程计算弹 丸 与最终落点( X 4 , Y 4 , Z 4 ) 之间距离 D 取 2 500 m 时刻的弹道倾角 和时刻 t 。 2) 远程仿真( 惯性制导段、 末制导段) : 计算非制 导段结束时刻 t 2、 位置( X , Y , Z ) 和速度 V , 条件为倾 角 0 为 30° 。 设陀螺在垂直平面的漂移速度为
2. 1 四自由度弹道模型采用的坐标系 1) 地面坐标系 O-xy z 坐标原点 O 为炮口中心 , Ox 轴为射面与水平 面的交线, 射击方向为正 ; Oy 轴在射 面内垂直 Ox
( 总第 36・ 136・
728)
火力与指挥控制
2011 年 第 4 期
轴 , 向上为正 ; Oz 轴与 Ox 、 Oy 轴构成右手直角坐标 系系。 2) 基准坐标系 O c xy z 亦 称平动 坐标 系, 坐 标原 点 Oc 为弹 丸质 心, Oc x 、 O cy 、 Ocz 轴分别与地面坐标系 Ox 、 Oy 、 Oz 轴对 应平行。 3) 速度坐标系 O c x v yv z v 坐标原点 Oc 为弹丸质心 , Oc x v 轴 与速度 v 重 合 , 指向一致 ; Oc y v 轴在铅直面内垂直 Oc x v 轴, 向上 为正; Oc z v 轴与 Oc x v 、 Oc y v 轴构成右手直角坐标系。 4) 弹轴坐标系 O c 坐标原点 Oc 为弹丸质心 , O c 轴与弹轴重合, 向弹头方向为正 ; Oc 轴垂直 O c 轴 ; Oc 轴与 O c 、 Oc 轴构成右手直角坐标系。 2. 2 激光半主动制导炮弹弹道特性 以某型号加榴炮配属的激光半主动制导炮弹为 例 , 弹道分为自由飞行段、 惯性制导段和末制导段。 根据炮弹射程划分 : 1) “ 近区” 射击 : 包括自由飞行段、 末制导段。其 中非制导段结束时刻为关键点, 此点到弹道终点距 离约为 2 500 m 。 2) “ 远区” 射击 : 包括自由飞行段、 惯性制导段、 末制导段。其中非制导段结束时刻和惯性制导段结 束时刻为关键点, 惯性制导段可以简单看成直线段, 弹道倾角为一固定值, 速度为自由段结束时刻的速 度 , 末制导段开始时刻点距离弹道终点距离为 2 500 m。 2. 3 弹道数据准备 在仿真之前需要对 弹道射表数据进行预先处 理 , 处理方式按炮弹射程分为: 1) “ 近区” 射击模式 : 近距离射击根据距离再细 划分四段, 每一段对应一个发射初速 , 针对每段射击 距离, 分别每隔一定射角 计算一个射程 d 、 弹丸飞 行时间 t1 、 弹道终点倾角 , 保存该计算结果。 2) “ 远区” 射击模式 : 非制导段与惯性制导段是 平滑过渡的, 在非制导段弹道下降阶段, 当弹道倾角 大于一定值时( 取值 30° ) , 弹道转为制导弹道 ( 如图 中 B 点 ) , 弹道基本上按等速直线运动, 弹丸的运动 速度为非制导段与惯性制导段交接点的速度。 根据惯性制导弹道倾角取 值 30 ° , 对应任一个 射角 和初速 V , 可以计算非制导段与惯性制导段 交接点 B 点的 X 坐标 X 1 , 惯性制导段与地面交点 的坐标 X 2 和弹丸飞行时间 t 1, 并计算弹丸自由飞行 ( 没有惯性制导段 ) 时的落点坐标 X 3。 初始给定 V 一 个值, 计算射击距离最大的射角 和 X 2 , 如果 X 2 大
Abstract: L aser semi-Init iat ive guided shell is a indir ect fire missile Weapon t hat adds a cannon launched guidance syst em on t he basis of unguided t raject or y , t here ar e err ors in cannon f iring , and t he errors increase w it h t he f iring dist ance. In this art icle w e w ill analy ze t he charact eristics o f g uided shell t raject ory er rors and find out inf luence reason t hat aff ect s cannon f ir ing accur acy, f ounding probabilit y models of dest roying and apply ing M onte Carl o simulation technique in laser guided pro jectile to raise t he canno n firing ef f iciency . Key words : guided shell , firing ef f iciency , t raject ory , assesm ent s of operational ef fect iveness
1 概 述
激光半主动制导炮弹广泛应用于加榴炮、 迫击 炮等发射平台 , 是陆军精确制导弹药中比较成熟的 一种弹药, 主要作战目标为指挥所、 通信中心、 火力 点等高价值目标, 也可以打击运动的装甲目标。 炮射 激光制导炮弹为炮兵部队提供对敌后方目标的精确 打击能力 , 激光制导武器的迅猛发展。目前美军有 “ 铜斑蛇” 激光制导炮弹, 俄罗斯有“ 红土地” 激光制 导炮弹 , 我国也正在着手生产某型加榴炮发射的激 光制导炮弹。本文仿真分析炮射激光制导炮弹的弹 道误差特性、 作战效能等, 通过蒙特卡洛法仿真制导 炮弹对目标的射击效率。
v1
- 1X 4- Y1 = t an X 4- X 1
利用以上公式计算捕获区域 4 个顶点在 O -X Y 坐标系下的坐标。 计算 t 时刻目标的真实位置( X , Y ) 和速度 V , 如果 V > V m ax ( 可射击的目标最大运动速度 ) , 令命 中概率为 0, 仿真结束 , 否则如果( X , Y ) 在捕获区域 内, 转入命中概率的仿真 , 如果目标不在捕获区时仿 真结束。 3. 10 命中概率的仿真 设末制导炮弹的可靠性为 A , 取 ( 0, 1) 之间均匀 分布随机数 , 如果 > A , 表示此发弹出故障 , 仿真 结束 , 否则继续仿真炮弹对目标的命中概率。 单发命中目标概率 P 为 : P = P 1 ・P 2 P 1 为精确制导条件下的命中概率 , P 2 为实现 精确制导的概率。 P 2= P 3 ・( 1- P 4 ) ・ ( 1- P 5 ) ・( 1- P 6) P 3 为照射系统( 主要是测手) 正常工作的概率 , 分为无干扰情况、 周围有火力干扰情况、 受伤情况、
2 弹道模型以及数据准备
激光半主动制导炮弹飞行弹道示意图如图 1 所 示: 其中 A 点为炮弹发射初始点 , B 点为非制导段 末点 , C 点为惯性制导段末点 , D 点为炮弹命中目标 点。
图 1 激光半主动制导炮弹飞行弹道示意图 收稿日期 : 20100108 修回日期 : 20100306 作 者简介 : 任海 龙 ( 1973 ) , 男 , 内蒙古赤 峰人 , 高级 工程 师 , 研究方向 : 复杂系统 建模与仿真。
V ol. 36, N o. 4 A pr, 2011
火 力与 指 挥 控 制 Fire Cont rol & 011 年 4 月
文章编号 : 10020640( 2011) 04-013503
激光半主动制导炮弹的作战效能评估仿真
于最大射程 , V 减小, 否则, V 增大, 一直调整到 X 2 为最大射程, 此时 V 为等效初速。对应弹丸初速为 V , 射击距离在远距离分为内每隔一定射角 计算 一个射程 d 、 弹丸飞行时间 t1 , 确定一系列表尺值所 相应的距离和时间, 保存该计算结果。
3 仿真模型
3. 1 发射平台的仿真 本仿真对炮兵连阵地配置的仿真采用单门炮发 射单个激光制导炮弹。 3. 2 弹丸飞行时间的预测 利用弹道方程结果计算射击点为 ( X 2, Y 2 , Z 2 ) 的弹丸飞行时间 t 1。炮弹发射时刻为 T 0, 则炮弹飞 行结束的时间为 : t= T 0 + t1 3. 3 目标未来点预测 X 2 = X 2+ V X ・ ( t - t 0) Y′ 2= Y 2+ V Y ・ ( t - t 0)
y y
任海龙 , 等 : 激光半主动制导炮弹的作战效能评估仿真
′
( 总第 36- 729) ・137・
X 4= X 2 + Y 4= Y +
′ 2
d ・cos -
z ・sin
d ・sin + z ・ cos ′ - 1 Y2- Y1 = tan ′ X 2- X 1
2 捕获 区 域 O1 为 捕获 区 域 中 心, 坐 标为 ( X 4 , 捕获区域 4 个顶点在 O 1Y 4) , ( X 1, Y 1 ) 为炮的坐标。 X 1Y 1 坐 标 系下 的 坐标 分别 为 ( - L 1 / 2, - L 2 / 2) , ( L 1/ 2, - L 2 / 2) , ( - L 1/ 2, - L 2/ 2) , ( L 1/ 2, - L 2/ 2) , O 1-X 1Y 1 坐标系到 O X Y 坐标系之间的转换关系为 : X Y = X4 Y4 + cos sin - sin cos ・ X1 Y1
′ t 0 为侦察时刻, 依据未来点 ( X ′ 2 , Y 2 ) 重新预测弹 ′ 丸飞行时间 t 1, 再计算( X ′ 2, Y2) 。 ′
3. 4 计算射击诸元 ′ 利用弹道方程结果计算射击点为( X ′ 2, Y 2) 的射 击诸元, 根据距离可以查射表确定射角 , 根据 ( X ′ 2,