最新东南大学微机习题课2part1new3
微机原理作业及参考答案
第二章计算机基础(P32)1-1电子管,晶体管,中小规模集成电路、大规模、超大规模集成电路。
1-2把CPU和一组称为寄存器(Registers)的特殊存储器集成在一片大规模集成电路或超大规模集成电路封装之中,这个器件才被称为微处理器。
以微处理器为核心,配上由大规模集成电路制作的只读存储器(ROM)、读写存储器(RAM)、输入/输出、接口电路及系统总线等所组成的计算机,称为微型计算机。
微型计算机系统是微型计算机配置相应的系统软件,应用软件及外部设备等.1-3写出下列机器数的真值:(1)01101110 (2)10001101(3)01011001 (4)11001110答案:(1)+110 (2)-13(原码) -114(反码)-115(补码)(3)+89 (4)-78(原码)-49(反码)-50(补码)1-4写出下列二进制数的原码、反码和补码(设字长为8位):(1)+010111 (2)+101011(3)-101000 (4)-111111答案:(1)[x]原=00010111 [x]反= 00010111 [x]补= 00010111(2)[x]原=00101011 [x]反= 00101011 [x]补= 00101011(3)[x]原=10101000 [x]反= 11010111 [x]补= 11011000(4)[x]原=10111111 [x]反= 11000000 [x]补=110000011-5 当下列各二进制数分别代表原码,反码,和补码时,其等效的十进制数值为多少?(1)00001110 表示原码14,反码14,表示补码为14(2)11111111 表示原码-127,反码-0,表示补码为-1(3)10000000 表示原码-0,反码-127,表示补码为-128(4)10000001 表示原码-1,反码-126,表示补码为-1271-6 已知x1=+0010100,y1=+0100001,x2=-0010100,y2=-0100001,试计算下列各式。
微机系统与接口_东南大学中国大学mooc课后章节答案期末考试题库2023年

微机系统与接口_东南大学中国大学mooc课后章节答案期末考试题库2023年1.以下指令不影响标志寄存器状态的是()。
参考答案:LEA2.若定义DADA DW 1234H,5678H, 则执行MOV BL,BYTE PTR DATA 指令后,BL=()。
参考答案:34H3.CPU与存储芯片的连接方式将影响芯片的()。
参考答案:地址范围4.某数在计算机中用压缩BCD码表示为10010011,其真值为。
参考答案:935.动态RAM的基本存储电路,是利用MOS管栅-源极之间电容对电荷的暂存效应来实现信息存储的。
为了避免所存信息的丢失,必须定时给电容补充电荷,这一操作称为()。
参考答案:刷新6.只读存储器ROM的特点是参考答案:在使用时不能够改变_只能用于存放固定程序7.关于部分译码法说法正确的是参考答案:部分译码法比全译码法简单_存在地址重叠8.中断向量与中断类型码的关系是()。
参考答案:中断向量地址=中断类型码*49.数据定义语句DATA DW34H, 5DUP(?) 分共配()个字节的存储单元。
参考答案:1210.假设8255的口地址为100H-103H,需要进行开中断操作,即使得INTE=1,为此编写以下程序段,请将其补充完整。
MOV AL, 00001101b;(PC6=1)MOV DX, _______OUT DX, AL参考答案:103H11.若8255 A口工作方式2,B口工作于方式1,则C口有位可以用于输入输出。
参考答案:12.设8254的计数器0的端口地址为60H,计数器1的端口地址为64H,则控制口的地址应为()。
参考答案:6CH13.设DS=2000H, SS=1000H, BP=200H, BX=150H, SI=100H, 则指令MOV AX,[BP+SI],源操作数的物理地址是()。
参考答案:10300H14.若8254处于计数过程中,当CPU对它装入新的计数初值时,其结果是()参考答案:8254允许编程,是否影响当前计数过程随工作方式不同而不同15.8088/8086有20根地址线,其可以寻址的最大I/O空间为()参考答案:64K16.下面那一选项是外存储器的类型参考答案:辅助存储器17.电擦除可编程ROM的特点是参考答案:可以按字节进行擦除18.若使用存放在寄存器BX中的偏移地址进行寻址,其默认对应的段寄存器为参考答案:DS19.中断返回指令是()。
东南大学微机习题课2part2new4从定时器,并串口,到ADDA

例题
变化——2011年考题: 要求分4组进行判别, 当发现任何一组(如S0与S1, S2与S3,S4与S5,S6与S7)输入开关状态相同时, 对应指示灯(L0-L3)亮报警。设计说明8255A的初 始化要求(工作模式), 根据设计电路,说明原理 [注],编写完成上述功能的检测、报警程序片 断 (8分) 。 如果要求报警判断为连续四次输入同组状态相同 时才输出报警,简单说明应该如何修改程序 (3 分)。
;LED0 ;LED1 ;LED2
例题
习题5(1).2 输入输出电路如教材中图5.10 和5.11 所示,试编 一程序,实现微机连续检测开关K1-K8状态,当开关 K1-K8 全部闭合或全部断开时使LED 亮,否则使LED 熄灭,同时把开关状态存放在SwitchS 单元内。#43;1个脉冲发中断请求,软件启动 方式2:速率发生器,对clk进行n分频 方式3:方波发生器,区分n奇数/偶数情况
应用: 硬件级联的概念、定时中断
习题
习题5(1)-1:I/O 的控制方式主要有哪几种?各有 什么特点?
• 1)(程序)查询方式2)中断方式 3)DMA方 式 – 传送效率低 – 效率较高,CPU响应较快,但传送由中断软件 完成 – 效率较高,硬件完成,但电路复杂。
要求当SW0~SW7中有1~7个接通时L0发光管亮,所 有8个开关都接通时L1亮,8个都不接通时L2亮。
已利用地址信号A9~A4得到8255片选译码地址为 28XH(X由A3-A0确定),片内寄存器地址线A1和A0 分别与处理器地址线A3、A2相连。
例题
(1) 完成右侧8255与开关和发光管的示意连线, 注 意通断(亮灭)输入输出电平关系;
D0 ...D7
D0 ...D7 PB2
东南大学微机原理复习课(接口部分)..共61页

谢谢!Βιβλιοθήκη 东南大学微机原理复习课(接口部分)..
1、 舟 遥 遥 以 轻飏, 风飘飘 而吹衣 。 2、 秋 菊 有 佳 色,裛 露掇其 英。 3、 日 月 掷 人 去,有 志不获 骋。 4、 未 言 心 相 醉,不 再接杯 酒。 5、 黄 发 垂 髫 ,并怡 然自乐 。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
东南大学微机原理复习课(汇编部分)
仔细审题:字节、字、DB、DW、字符、字符串 列出存储单元图 接口题:写出地址译码分析过程 编程题代码完整,加注释
溢出: 运算结果超出范围 CF/OF (AX)=A000H, ADD AX,7000H ADD AX,-7000H 在微机系统中,数值以补码表示和存储的 例: -4 八位100H-4=0FCH,16位10000H-4=0FFFCH 例:汇编指令 MOV AX, -3 (AX)=?
(1) 数制、补码的概念与运算
ASCII码: 00-7FH 字符(美国标准信息交换代码 ) 0DH—— CR 回车 0AH—— LF 换行 字符:‘0’-‘9’——30-39H; ‘A’——41H, ‘a’——61H
(2)8086/8088 CPU硬件结构
CPU基本构成: 执行单元EU:执行指令,含ALU和通用寄存器; 总线接口单元BIU:与存储器或I/O端口之间进行数据传送, 并能形成物理地址,含段寄存器和指令指针寄存器; ——并行-流水线,预取-指令队列
(2)8086/8088 CPU硬件结构
有效地址EA(偏移量地址) 逻辑地址=段基址S和偏移地址 物理地址=S*16+EA (得到20位物理地址,A19--A0 )
存储器:高字节高地址,低字节低地址。 堆栈段:SS表示堆栈段的段基,SP指向栈顶 PUSH AX ;(SP)(SP-2);(SP+1)(AH);(SP)AL POP AX;(AL)(SP); (AH)(SP+1); (SP)(SP+2) 并不改变堆栈里单元内容,以字为单位操作,SP值总是偶数, 先进后出(FILO)。 中断矢量表:中断类型号n=0~255,256*4=1K (00000003FFH ),连续存放,高字节CS,低字节IP。
最新东南大学微机试卷-期末-AB
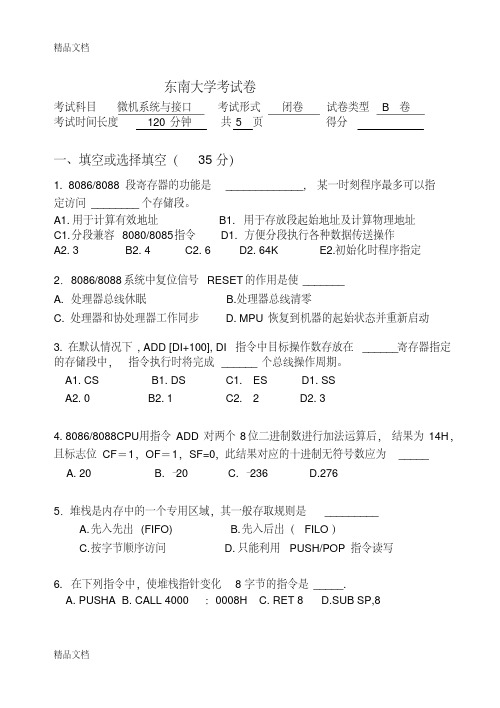
东南大学考试卷考试科目微机系统与接口考试形式闭卷试卷类型 B卷考试时间长度120分钟共 5 页得分一、填空或选择填空(35分)1. 8086/8088段寄存器的功能是_____________, 某一时刻程序最多可以指定访问________个存储段。
A1.用于计算有效地址B1. 用于存放段起始地址及计算物理地址C1.分段兼容8080/8085指令D1. 方便分段执行各种数据传送操作A2. 3 B2. 4 C2. 6D2. 64K E2.初始化时程序指定2.8086/8088系统中复位信号RESET的作用是使_______A. 处理器总线休眠B.处理器总线清零C. 处理器和协处理器工作同步D. MPU恢复到机器的起始状态并重新启动3. 在默认情况下, ADD [DI+100], DI指令中目标操作数存放在______寄存器指定的存储段中,指令执行时将完成______ 个总线操作周期。
A1. CS B1. DS C1. ES D1. SSA2. 0 B2. 1 C2. 2 D2. 34. 8086/8088CPU用指令ADD对两个8位二进制数进行加法运算后,结果为14H,且标志位CF=1,OF=1,SF=0,此结果对应的十进制无符号数应为_____A. 20B. –20C. –236D.2765.堆栈是内存中的一个专用区域,其一般存取规则是_________A.先入先出(FIFO)B.先入后出(FILO)C.按字节顺序访问D.只能利用PUSH/POP指令读写6. 在下列指令中,使堆栈指针变化8字节的指令是_____.A. PUSHAB. CALL 4000:0008HC. RET 8D.SUB SP,8----第2页共5页----7. 指出下列指令或伪指令中所有正确者:____________。
(A) POP DS (B) MOV AX,[BX][BP](C) MOV BP, CS:[BP] (D) DW -222,20,0100000B(E) OUT 288H,AL (F) ADDC WORD PTR [BX+100],08. 8086/8088系统中,256K*4的存储器, 为正确实现全部片内译码, 需要_______根地址线.A. 4B.8C.16D. 17E.18F.199.定时/计数器8253是_________减法计数器,最大计数范围是_________。
物理学第五版东南大学马文蔚上下册1-15章节课后习题答案(个人整理)

第一章 质点运动学1 -1 质点作曲线运动,在时刻t 质点的位矢为r ,速度为v ,速率为v ,t 至(t +Δt )时间内的位移为Δr , 路程为Δs , 位矢大小的变化量为Δr ( 或称Δ|r |),平均速度为v ,平均速率为v .(1) 根据上述情况,则必有( )(A) |Δr |= Δs = Δr(B) |Δr |≠ Δs ≠ Δr ,当Δt →0 时有|d r |= d s ≠ d r(C) |Δr |≠ Δr ≠ Δs ,当Δt →0 时有|d r |= d r ≠ d s(D) |Δr |≠ Δs ≠ Δr ,当Δt →0 时有|d r |= d r = d s(2) 根据上述情况,则必有( )(A) |v |= v ,|v |= v (B) |v |≠v ,|v |≠ v(C) |v |= v ,|v |≠ v (D) |v |≠v ,|v |= v分析与解 (1) 质点在t 至(t +Δt )时间内沿曲线从P 点运动到P′点,各量关系如图所示, 其中路程Δs =PP′, 位移大小|Δr |=PP ′,而Δr =|r |-|r |表示质点位矢大小的变化量,三个量的物理含义不同,在曲线运动中大小也不相等(注:在直线运动中有相等的可能).但当Δt →0 时,点P ′无限趋近P 点,则有|d r |=d s ,但却不等于d r .故选(B).(2) 由于|Δr |≠Δs ,故ts t ΔΔΔΔ r ,即|v |≠v .但由于|d r |=d s ,故ts t d d d d =r ,即|v |=v .由此可见,应选(C). 1 -2 一运动质点在某瞬时位于位矢r (x,y )的端点处,对其速度的大小有四种意见,即 (1)t r d d ; (2)t d d r ; (3)t s d d ; (4)22d d d d ⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛t y t x . 下述判断正确的是( )(A) 只有(1)(2)正确 (B) 只有(2)正确(C) 只有(2)(3)正确 (D) 只有(3)(4)正确分析与解 tr d d 表示质点到坐标原点的距离随时间的变化率,在极坐标系中叫径向速率.通常用符号v r 表示,这是速度矢量在位矢方向上的一个分量;td d r 表示速度矢量;在自然坐标系中速度大小可用公式t s d d =v 计算,在直角坐标系中则可由公式22d d d d ⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=t y t x v 求解.故选(D). 1 -3 质点作曲线运动,r 表示位置矢量, v 表示速度,a 表示加速度,s 表示路程, a t表示切向加速度.对下列表达式,即(1)d v /d t =a ;(2)d r /d t =v ;(3)d s /d t =v ;(4)d v /d t |=a t.下述判断正确的是( )(A) 只有(1)、(4)是对的 (B) 只有(2)、(4)是对的(C) 只有(2)是对的 (D) 只有(3)是对的分析与解td d v 表示切向加速度a t,它表示速度大小随时间的变化率,是加速度矢量沿速度方向的一个分量,起改变速度大小的作用;tr d d 在极坐标系中表示径向速率v r (如题1 -2 所述);t s d d 在自然坐标系中表示质点的速率v ;而td d v 表示加速度的大小而不是切向加速度a t.因此只有(3) 式表达是正确的.故选(D).1 -4 一个质点在做圆周运动时,则有( )(A) 切向加速度一定改变,法向加速度也改变(B) 切向加速度可能不变,法向加速度一定改变(C) 切向加速度可能不变,法向加速度不变(D) 切向加速度一定改变,法向加速度不变分析与解 加速度的切向分量a t起改变速度大小的作用,而法向分量a n 起改变速度方向的作用.质点作圆周运动时,由于速度方向不断改变,相应法向加速度的方向也在不断改变,因而法向加速度是一定改变的.至于a t是否改变,则要视质点的速率情况而定.质点作匀速率圆周运动时, a t恒为零;质点作匀变速率圆周运动时, a t为一不为零的恒量,当a t改变时,质点则作一般的变速率圆周运动.由此可见,应选(B).*1 -5 如图所示,湖中有一小船,有人用绳绕过岸上一定高度处的定滑轮拉湖中的船向岸边运动.设该人以匀速率v 0 收绳,绳不伸长且湖水静止,小船的速率为v ,则小船作( )(A) 匀加速运动,θcos 0v v = (B) 匀减速运动,θcos 0v v =(C) 变加速运动,θcos 0v v = (D) 变减速运动,θcos 0v v =(E) 匀速直线运动,0v v =分析与解 本题关键是先求得小船速度表达式,进而判断运动性质.为此建立如图所示坐标系,设定滑轮距水面高度为h,t 时刻定滑轮距小船的绳长为l ,则小船的运动方程为22h l x -=,其中绳长l 随时间t 而变化.小船速度22d d d d h l t llt x -==v ,式中t l d d 表示绳长l 随时间的变化率,其大小即为v 0,代入整理后为θl h l cos /0220v v v =-=,方向沿x 轴负向.由速度表达式,可判断小船作变加速运动.故选(C).讨论 有人会将绳子速率v 0按x 、y 两个方向分解,则小船速度θcos 0v v =,这样做对吗?1 -6 已知质点沿x 轴作直线运动,其运动方程为32262t t x -+=,式中x 的单位为m,t 的单位为 s .求:(1) 质点在运动开始后4.0 s 内的位移的大小;(2) 质点在该时间内所通过的路程;(3) t =4 s 时质点的速度和加速度.分析 位移和路程是两个完全不同的概念.只有当质点作直线运动且运动方向不改变时,位移的大小才会与路程相等.质点在t 时间内的位移Δx 的大小可直接由运动方程得到:0Δx x x t -=,而在求路程时,就必须注意到质点在运动过程中可能改变运动方向,此时,位移的大小和路程就不同了.为此,需根据0d d =tx 来确定其运动方向改变的时刻t p ,求出0~t p 和t p ~t 内的位移大小Δx 1 、Δx 2 ,则t 时间内的路程21x x s ∆+∆=,如图所示,至于t =4.0 s 时质点速度和加速度可用tx d d 和22d d t x 两式计算. 解 (1) 质点在4.0 s 内位移的大小m 32Δ04-=-=x x x(2) 由 0d d =tx 得知质点的换向时刻为s 2=p t (t =0不合题意)则m 0.8Δ021=-=x x xm 40Δ242-=-=x x x所以,质点在4.0 s 时间间隔内的路程为m 48ΔΔ21=+=x x s(3) t =4.0 s 时1s0.4s m 48d d -=⋅-==t t x v 2s0.422m.s 36d d -=-==t t x a 1 -7 一质点沿x 轴方向作直线运动,其速度与时间的关系如图(a)所示.设t =0 时,x =0.试根据已知的v -t 图,画出a -t 图以及x -t 图.分析根据加速度的定义可知,在直线运动中v-t曲线的斜率为加速度的大小(图中AB、CD 段斜率为定值,即匀变速直线运动;而线段BC 的斜率为0,加速度为零,即匀速直线运动).加速度为恒量,在a-t图上是平行于t轴的直线,由v -t 图中求出各段的斜率,即可作出a -t 图线.又由速度的定义可知,x -t 曲线的斜率为速度的大小.因此,匀速直线运动所对应的x -t 图应是一直线,而匀变速直线运动所对应的x –t 图为t 的二次曲线.根据各段时间内的运动方程x =x (t ),求出不同时刻t 的位置x ,采用描数据点的方法,可作出x -t 图.解 将曲线分为AB 、BC 、CD 三个过程,它们对应的加速度值分别为2s m 20-⋅=--=AB A B AB t t a v v (匀加速直线运动) 0=BC a (匀速直线运动)2s m 10-⋅-=--=CD C D CD t t a v v (匀减速直线运动) 根据上述结果即可作出质点的a -t 图[图(B)].在匀变速直线运动中,有2021t t x x ++=v 由此,可计算在0~2s和4~6s时间间隔内各时刻的位置分别为用描数据点的作图方法,由表中数据可作0~2s和4~6s时间内的x -t 图.在2~4s时间内, 质点是作1s m 20-⋅=v 的匀速直线运动, 其x -t 图是斜率k =20的一段直线[图(c)].1 -8 已知质点的运动方程为j i r )2(22t t -+=,式中r 的单位为m,t 的单位为s.求:(1) 质点的运动轨迹;(2) t =0 及t =2s时,质点的位矢;(3) 由t =0 到t =2s内质点的位移Δr 和径向增量Δr ;*(4) 2 s 内质点所走过的路程s .分析 质点的轨迹方程为y =f (x ),可由运动方程的两个分量式x (t )和y (t )中消去t 即可得到.对于r 、Δr 、Δr 、Δs 来说,物理含义不同,可根据其定义计算.其中对s 的求解用到积分方法,先在轨迹上任取一段微元d s ,则22)d ()d (d y x s +=,最后用⎰=s s d 积分求s.解 (1) 由x (t )和y (t )中消去t 后得质点轨迹方程为2412x y -= 这是一个抛物线方程,轨迹如图(a)所示.(2) 将t =0s和t =2s分别代入运动方程,可得相应位矢分别为j r 20= , j i r 242-=图(a)中的P 、Q 两点,即为t =0s和t =2s时质点所在位置.(3) 由位移表达式,得j i j i r r r 24)()(Δ020212-=-+-=-=y y x x 其中位移大小m 66.5)(Δ)(ΔΔ22=+=y x r 而径向增量m 47.2ΔΔ2020222202=+-+=-==y x y x r r r r *(4) 如图(B)所示,所求Δs 即为图中PQ 段长度,先在其间任意处取AB 微元d s ,则22)d ()d (d y x s +=,由轨道方程可得x x y d 21d -=,代入d s ,则2s内路程为 m 91.5d 4d 402=+==⎰⎰x x s s Q P1 -9 质点的运动方程为23010t t x +-=22015t t y -=式中x ,y 的单位为m,t 的单位为s.试求:(1) 初速度的大小和方向;(2) 加速度的大小和方向.分析 由运动方程的分量式可分别求出速度、加速度的分量,再由运动合成算出速度和加速度的大小和方向.解 (1) 速度的分量式为t tx x 6010d d +-==v t ty y 4015d d -==v 当t =0 时, v o x =-10 m·s-1 , v o y =15 m·s-1 ,则初速度大小为 120200s m 0.18-⋅=+=y x v v v设v o 与x 轴的夹角为α,则23tan 00-==x yαv v α=123°41′(2) 加速度的分量式为2s m 60d d -⋅==t a x x v , 2s m 40d d -⋅-==ta y y v 则加速度的大小为222s m 1.72-⋅=+=y x a a a设a 与x 轴的夹角为β,则 32tan -==x y a a β β=-33°41′(或326°19′)1 -10 一升降机以加速度1.22 m·s-2上升,当上升速度为2.44 m·s-1时,有一螺丝自升降机的天花板上松脱,天花板与升降机的底面相距2.74 m .计算:(1)螺丝从天花板落到底面所需要的时间;(2)螺丝相对升降机外固定柱子的下降距离.分析 在升降机与螺丝之间有相对运动的情况下,一种处理方法是取地面为参考系,分别讨论升降机竖直向上的匀加速度运动和初速不为零的螺丝的自由落体运动,列出这两种运动在同一坐标系中的运动方程y 1 =y 1(t )和y 2 =y 2(t ),并考虑它们相遇,即位矢相同这一条件,问题即可解;另一种方法是取升降机(或螺丝)为参考系,这时,螺丝(或升降机)相对它作匀加速运动,但是,此加速度应该是相对加速度.升降机厢的高度就是螺丝(或升降机)运动的路程.解1 (1) 以地面为参考系,取如图所示的坐标系,升降机与螺丝的运动方程分别为20121at t y +=v 20221gt t h y -+=v 当螺丝落至底面时,有y 1 =y 2 ,即20202121gt t h at t -+=+v v s 705.02=+=ag h t (2) 螺丝相对升降机外固定柱子下降的距离为 m 716.021202=+-=-=gt t y h d v 解2 (1)以升降机为参考系,此时,螺丝相对它的加速度大小a ′=g +a ,螺丝落至底面时,有2)(210t a g h +-= s 705.02=+=ag h t (2) 由于升降机在t 时间内上升的高度为2021at t h +='v 则 m 716.0='-=h h d1 -11一质点P 沿半径R=3.0 m的圆周作匀速率运动,运动一周所需时间为20.0s,设t=0 时,质点位于O点.按(a)图中所示Oxy坐标系,求(1) 质点P 在任意时刻的位矢;(2)5s时的速度和加速度.分析该题属于运动学的第一类问题,即已知运动方程r=r(t)求质点运动的一切信息(如位置矢量、位移、速度、加速度).在确定运动方程时,若取以点(0,3)为原点的O′x′y′坐标系,并采用参数方程x′=x′(t)和y′=y′(t)来表示圆周运动是比较方便的.然后,运用坐标变换x=x0 +x′和y=y0 +y′,将所得参数方程转换至Oxy坐标系中,即得Oxy坐标系中质点P 在任意时刻的位矢.采用对运动方程求导的方法可得速度和加速度.解 (1) 如图(B)所示,在O′x′y′坐标系中,因t Tθπ2=,则质点P 的参数方程为 t T R x π2sin=', t TR y π2cos -=' 坐标变换后,在O x y 坐标系中有 t T R x x π2sin='=, R t TR y y y +-=+'=π2cos 0 则质点P 的位矢方程为 j i r ⎪⎭⎫ ⎝⎛+-+=R t T R t T R π2cos π2sin j i )]π1.0(cos 1[3)π1.0(sin 3t t -+=(2) 5s时的速度和加速度分别为j j i r )s m π3.0(π2sin π2π2cos π2d d 1-⋅=+==t TT R t T T R t v i j i r a )s m π03.0(π2cos )π2(π2sin )π2(d d 222222-⋅-=+-==t TT R t T T R t 1 -12 地面上垂直竖立一高20.0 m 的旗杆,已知正午时分太阳在旗杆的正上方,求在下午2∶00 时,杆顶在地面上的影子的速度的大小.在何时刻杆影伸展至20.0 m ?分析 为求杆顶在地面上影子速度的大小,必须建立影长与时间的函数关系,即影子端点的位矢方程.根据几何关系,影长可通过太阳光线对地转动的角速度求得.由于运动的相对性,太阳光线对地转动的角速度也就是地球自转的角速度.这样,影子端点的位矢方程和速度均可求得.解 设太阳光线对地转动的角速度为ω,从正午时分开始计时,则杆的影长为s =h tg ωt ,下午2∶00 时,杆顶在地面上影子的速度大小为132s m 1094.1cos d d --⋅⨯===tωωh t s v 当杆长等于影长时,即s =h ,则 s 606034πarctan 1⨯⨯===ωh s ωt 即为下午3∶00 时.1 -13 质点沿直线运动,加速度a =4 -t2 ,式中a 的单位为m·s-2 ,t 的单位为s.如果当t =3s时,x =9 m,v =2 m·s-1 ,求质点的运动方程.分析 本题属于运动学第二类问题,即已知加速度求速度和运动方程,必须在给定条件下用积分方法解决.由t a d d v =和tx d d =v 可得t a d d =v 和t x d d v =.如a =a (t )或v =v (t ),则可两边直接积分.如果a 或v 不是时间t 的显函数,则应经过诸如分离变量或变量代换等数学操作后再做积分.解 由分析知,应有⎰⎰=t t a 0d d 0v v v 得 03314v v +-=t t (1)由 ⎰⎰=t x x t x 0d d 0v 得 00421212x t t t x ++-=v (2) 将t =3s时,x =9 m,v =2 m·s-1代入(1) (2)得v 0=-1 m·s-1,x 0=0.75 m .于是可得质点运动方程为75.0121242+-=t t x 1 -14 一石子从空中由静止下落,由于空气阻力,石子并非作自由落体运动,现测得其加速度a =A -B v ,式中A 、B 为正恒量,求石子下落的速度和运动方程.分析 本题亦属于运动学第二类问题,与上题不同之处在于加速度是速度v 的函数,因此,需将式d v =a (v )d t 分离变量为t a d )(d =v v 后再两边积分. 解 选取石子下落方向为y 轴正向,下落起点为坐标原点.(1) 由题意知 v v B A ta -==d d (1) 用分离变量法把式(1)改写为 t B A d d =-vv (2) 将式(2)两边积分并考虑初始条件,有⎰⎰=-t t B A 0d d d 0v vv v v得石子速度 )1(Bt e B A --=v 由此可知当,t →∞时,B A →v 为一常量,通常称为极限速度或收尾速度. (2) 再由)1(d d Bt e BA t y --==v 并考虑初始条件有 t eB A y t Bt y d )1(d 00⎰⎰--=得石子运动方程)1(2-+=-Bt e BA tB A y 1 -15 一质点具有恒定加速度a =6i +4j ,式中a 的单位为m·s-2 .在t =0时,其速度为零,位置矢量r 0 =10 m i .求:(1) 在任意时刻的速度和位置矢量;(2) 质点在Oxy 平面上的轨迹方程,并画出轨迹的示意图.分析 与上两题不同处在于质点作平面曲线运动,根据叠加原理,求解时需根据加速度的两个分量a x 和a y 分别积分,从而得到运动方程r 的两个分量式x (t )和y (t ).由于本题中质点加速度为恒矢量,故两次积分后所得运动方程为固定形式,即20021t a t x x x x ++=v 和20021t a t y y y y ++=v ,两个分运动均为匀变速直线运动.读者不妨自己验证一下.解 由加速度定义式,根据初始条件t 0 =0时v 0 =0,积分可得⎰⎰⎰+==t t t t 000)d 46(d d j i a v v j i t t 46+=v 又由td d r =v 及初始条件t =0 时,r 0=(10 m)i ,积分可得⎰⎰⎰+==tt r r t t t t 00)d 46(d d 0j i r v j i r 222)310(t t ++=由上述结果可得质点运动方程的分量式,即x =10+3t 2y =2t 2消去参数t ,可得运动的轨迹方程3y =2x -20 m 这是一个直线方程.直线斜率32tan d d ===αx y k ,α=33°41′.轨迹如图所示.1 -16 一质点在半径为R 的圆周上以恒定的速率运动,质点由位置A 运动到位置B,OA 和OB 所对的圆心角为Δθ.(1) 试证位置A 和B 之间的平均加速度为)Δ(/)Δcos 1(22θR θa v -=;(2) 当Δθ分别等于90°、30°、10°和1°时,平均加速度各为多少? 并对结果加以讨论.分析 瞬时加速度和平均加速度的物理含义不同,它们分别表示为t d d v =a 和tΔΔv =a .在匀速率圆周运动中,它们的大小分别为Ra n 2v =,t a ΔΔv = ,式中|Δv |可由图(B)中的几何关系得到,而Δt 可由转过的角度Δθ 求出.由计算结果能清楚地看到两者之间的关系,即瞬时加速度是平均加速度在Δt →0 时的极限值.解 (1) 由图(b)可看到Δv =v 2 -v 1 ,故θΔcos 2Δ212221v v v v -+=v)Δcos 1(2θ-=v而vv θR s t ΔΔΔ==所以 θR θt a Δ)cos Δ1(2ΔΔ2v -==v (2) 将Δθ=90°,30°,10°,1°分别代入上式,得R a 219003.0v ≈,Ra 229886.0v ≈ R a 239987.0v ≈,Ra 24000.1v ≈ 以上结果表明,当Δθ→0 时,匀速率圆周运动的平均加速度趋近于一极限值,该值即为法向加速度R2v . 1 -17 质点在Oxy 平面内运动,其运动方程为r =2.0t i +(19.0 -2.0t 2 )j ,式中r 的单位为m,t 的单位为s .求:(1)质点的轨迹方程;(2) 在t 1=1.0s 到t 2 =2.0s 时间内的平均速度;(3) t 1 =1.0s时的速度及切向和法向加速度;(4) t =1.0s 时质点所在处轨道的曲率半径ρ.分析 根据运动方程可直接写出其分量式x =x (t )和y =y (t ),从中消去参数t ,即得质点的轨迹方程.平均速度是反映质点在一段时间内位置的变化率,即tΔΔr =v ,它与时间间隔Δt 的大小有关,当Δt →0 时,平均速度的极限即瞬时速度td d r =v .切向和法向加速度是指在自然坐标下的分矢量a t 和a n ,前者只反映质点在切线方向速度大小的变化率,即t t te a d d v =,后者只反映质点速度方向的变化,它可由总加速度a 和a t 得到.在求得t 1 时刻质点的速度和法向加速度的大小后,可由公式ρa n 2v =求ρ. 解 (1) 由参数方程x =2.0t , y =19.0-2.0t 2消去t 得质点的轨迹方程:y =19.0 -0.50x 2(2) 在t 1 =1.00s 到t 2 =2.0s时间内的平均速度j i r r 0.60.2ΔΔ1212-=--==t t t r v (3) 质点在任意时刻的速度和加速度分别为 j i j i j i t t y t x t y x 0.40.2d d d d )(-=+=+=v v v j j i a 222220.4d d d d )(-⋅-=+=s m ty t x t 则t 1 =1.00s时的速度v (t )|t =1s=2.0i -4.0j切向和法向加速度分别为t t y x t t t tt e e e a 222s 1s m 58.3)(d d d d -=⋅=+==v v v n n t n a a e e a 222s m 79.1-⋅=-=(4) t =1.0s质点的速度大小为122s m 47.4-⋅=+=y x v v v 则m 17.112==na ρv 1 -18 飞机以100 m·s-1 的速度沿水平直线飞行,在离地面高为100 m 时,驾驶员要把物品空投到前方某一地面目标处,问:(1) 此时目标在飞机正下方位置的前面多远? (2) 投放物品时,驾驶员看目标的视线和水平线成何角度?(3) 物品投出2.0s后,它的法向加速度和切向加速度各为多少?分析 物品空投后作平抛运动.忽略空气阻力的条件下,由运动独立性原理知,物品在空中沿水平方向作匀速直线运动,在竖直方向作自由落体运动.到达地面目标时,两方向上运动时间是相同的.因此,分别列出其运动方程,运用时间相等的条件,即可求解.此外,平抛物体在运动过程中只存在竖直向下的重力加速度.为求特定时刻t 时物体的切向加速度和法向加速度,只需求出该时刻它们与重力加速度之间的夹角α或β.由图可知,在特定时刻t ,物体的切向加速度和水平线之间的夹角α,可由此时刻的两速度分量v x 、v y 求出,这样,也就可将重力加速度g 的切向和法向分量求得.解 (1) 取如图所示的坐标,物品下落时在水平和竖直方向的运动方程分别为x =v t , y =1/2 gt 2飞机水平飞行速度v =100 m·s -1 ,飞机离地面的高度y =100 m,由上述两式可得目标在飞机正下方前的距离m 4522==gy x v(2) 视线和水平线的夹角为 o 5.12arctan==x y θ (3) 在任意时刻物品的速度与水平轴的夹角为vv v gt αx y arctan arctan == 取自然坐标,物品在抛出2s 时,重力加速度的切向分量与法向分量分别为2s m 88.1arctan sin sin -⋅=⎪⎭⎫ ⎝⎛==v gt g αg a t 2s m 62.9arctan cos cos -⋅=⎪⎭⎫ ⎝⎛==v gt g αg a n 1 -19 如图(a)所示,一小型迫击炮架设在一斜坡的底端O 处,已知斜坡倾角为α,炮身与斜坡的夹角为β,炮弹的出口速度为v 0,忽略空气阻力.求:(1)炮弹落地点P 与点O 的距离OP ;(2) 欲使炮弹能垂直击中坡面.证明α和β必须满足αβtan 21tan =并与v 0 无关. 分析 这是一个斜上抛运动,看似简单,但针对题目所问,如不能灵活运用叠加原理,建立一个恰当的坐标系,将运动分解的话,求解起来并不容易.现建立如图(a)所示坐标系,则炮弹在x 和y 两个方向的分运动均为匀减速直线运动,其初速度分别为v 0cos β和v 0sin β,其加速度分别为g sin α和gcos α.在此坐标系中炮弹落地时,应有y =0,则x =OP .如欲使炮弹垂直击中坡面,则应满足v x =0,直接列出有关运动方程和速度方程,即可求解.由于本题中加速度g 为恒矢量.故第一问也可由运动方程的矢量式计算,即20g 21t t +=v r ,做出炮弹落地时的矢量图[如图(B)所示],由图中所示几何关系也可求得OP (即图中的r 矢量).(1)解1 由分析知,炮弹在图(a)所示坐标系中两个分运动方程为αgt βt x sin 21cos 20-=v (1) αgt βt y cos 21sin 20-=v (2) 令y =0 求得时间t 后再代入式(1)得)cos(cos sin 2)sin sin cos (cos cos sin 2220220βααg ββαβααg βx OP +=-==v v 解2 做出炮弹的运动矢量图,如图(b)所示,并利用正弦定理,有βgt αt βαsin 212πsin 2πsin 20=⎪⎭⎫ ⎝⎛+=⎪⎭⎫ ⎝⎛--v r从中消去t 后也可得到同样结果.(2) 由分析知,如炮弹垂直击中坡面应满足y =0 和v x =0,则0sin cos 0=-=αgt βx v v (3)由(2)(3)两式消去t 后得αβsin 21tan = 由此可知.只要角α和β满足上式,炮弹就能垂直击中坡面,而与v 0 的大小无关.讨论 如将炮弹的运动按水平和竖直两个方向分解,求解本题将会比较困难,有兴趣读者不妨自己体验一下.1 -20 一直立的雨伞,张开后其边缘圆周的半径为R ,离地面的高度为h ,(1) 当伞绕伞柄以匀角速ω旋转时,求证水滴沿边缘飞出后落在地面上半径为g ωh R r /212+=的圆周上;(2) 读者能否由此定性构想一种草坪上或农田灌溉用的旋转式洒水器的方案?分析 选定伞边缘O 处的雨滴为研究对象,当伞以角速度ω旋转时,雨滴将以速度v 沿切线方向飞出,并作平抛运动.建立如图(a)所示坐标系,列出雨滴的运动方程并考虑图中所示几何关系,即可求证.由此可以想像如果让水从一个旋转的有很多小孔的喷头中飞出,从不同小孔中飞出的水滴将会落在半径不同的圆周上,为保证均匀喷洒对喷头上小孔的分布还要给予精心的考虑.解 (1) 如图(a)所示坐标系中,雨滴落地的运动方程为t ωR t x ==v (1)h gt y ==221 (2) 由式(1)(2)可得 gh ωR x 2222= 由图(a)所示几何关系得雨滴落地处圆周的半径为22221ωgh R R x r +=+= (2) 常用草坪喷水器采用如图(b)所示的球面喷头(θ0 =45°)其上有大量小孔.喷头旋转时,水滴以初速度v 0 从各个小孔中喷出,并作斜上抛运动,通常喷头表面基本上与草坪处在同一水平面上.则以φ角喷射的水柱射程为gR 2sin 0v = 为使喷头周围的草坪能被均匀喷洒,喷头上的小孔数不但很多,而且还不能均匀分布,这是喷头设计中的一个关键问题.1 -21 一足球运动员在正对球门前25.0 m 处以20.0 m·s-1 的初速率罚任意球,已知球门高为3.44 m .若要在垂直于球门的竖直平面内将足球直接踢进球门,问他应在与地面成什么角度的范围内踢出足球? (足球可视为质点)分析 被踢出后的足球,在空中作斜抛运动,其轨迹方程可由质点在竖直平面内的运动方程得到.由于水平距离x 已知,球门高度又限定了在y 方向的范围,故只需将x 、y 值代入即可求出.解 取图示坐标系Oxy ,由运动方程θt x cos v =, 221sin gt θt y -=v 消去t 得轨迹方程 222)tan 1(2tan x θg θx y +-=v以x =25.0 m,v =20.0 m·s-1 及3.44 m≥y ≥0 代入后,可解得71.11°≥θ1 ≥69.92°27.92°≥θ2 ≥18.89°如何理解上述角度的范围?在初速一定的条件下,球击中球门底线或球门上缘都将对应有两个不同的投射倾角(如图所示).如果以θ>71.11°或θ <18.89°踢出足球,都将因射程不足而不能直接射入球门;由于球门高度的限制,θ 角也并非能取71.11°与18.89°之间的任何值.当倾角取值为27.92°<θ<69.92°时,踢出的足球将越过门缘而离去,这时球也不能射入球门.因此可取的角度范围只能是解中的结果.1 -22 一质点沿半径为R 的圆周按规律2021bt t s -=v 运动,v 0 、b 都是常量.(1) 求t 时刻质点的总加速度;(2) t 为何值时总加速度在数值上等于b ?(3) 当加速度达到b 时,质点已沿圆周运行了多少圈?分析 在自然坐标中,s 表示圆周上从某一点开始的曲线坐标.由给定的运动方程s =s (t ),对时间t 求一阶、二阶导数,即是沿曲线运动的速度v 和加速度的切向分量a t,而加速度的法向分量为a n =v 2 /R .这样,总加速度为a =a te t+a n e n .至于质点在t 时间内通过的路程,即为曲线坐标的改变量Δs =s t -s 0.因圆周长为2πR,质点所转过的圈数自然可求得.解 (1) 质点作圆周运动的速率为bt ts -==0d d v v 其加速度的切向分量和法向分量分别为b t s a t -==22d d , Rbt R a n 202)(-==v v 故加速度的大小为R )(402222bt b a a a a t tn -+=+=v 其方向与切线之间的夹角为⎥⎦⎤⎢⎣⎡--==Rb bt a a θt n 20)(arctan arctan v (2) 要使|a |=b ,由b bt b R R=-+4022)(1v 可得 bt 0v = (3) 从t =0 开始到t =v 0 /b 时,质点经过的路程为b s s s t 2200v =-= 因此质点运行的圈数为bRR s n π4π220v == 1 -23 一半径为0.50 m 的飞轮在启动时的短时间内,其角速度与时间的平方成正比.在t =2.0s 时测得轮缘一点的速度值为4.0 m·s-1.求:(1) 该轮在t′=0.5s的角速度,轮缘一点的切向加速度和总加速度;(2)该点在2.0s内所转过的角度.分析 首先应该确定角速度的函数关系ω=kt 2.依据角量与线量的关系由特定时刻的速度值可得相应的角速度,从而求出式中的比例系数k ,ω=ω(t )确定后,注意到运动的角量描述与线量描述的相应关系,由运动学中两类问题求解的方法(微分法和积分法),即可得到特定时刻的角加速度、切向加速度和角位移.解 因ωR =v ,由题意ω∝t 2 得比例系数322s rad 2-⋅===Rtt ωk v 所以 22)(t t ωω== 则t ′=0.5s 时的角速度、角加速度和切向加速度分别为12s rad 5.02-⋅='=t ω2s rad 0.24d d -⋅='==t tωα 2s m 0.1-⋅==R αa t总加速度n t t n R ωR αe e a a a 2+=+= ()()2222s m 01.1-⋅=+=R ωR αa 在2.0s内该点所转过的角度 rad 33.532d 2d 203202200====-⎰⎰t t t t ωθθ 1 -24 一质点在半径为0.10 m 的圆周上运动,其角位置为342t θ+=,式中θ 的单位为rad,t 的单位为s.(1) 求在t =2.0s时质点的法向加速度和切向加速度.(2) 当切向加速度的大小恰等于总加速度大小的一半时,θ 值为多少?(3) t 为多少时,法向加速度和切向加速度的值相等?分析 掌握角量与线量、角位移方程与位矢方程的对应关系,应用运动学求解的方法即可得到.解 (1) 由于342t θ+=,则角速度212d d t tθω==.在t =2 s 时,法向加速度和切向加速度的数值分别为 22s 2s m 30.2-=⋅==ωr a t n2s 2s m 80.4d d -=⋅==t ωr a t t(2) 当22212/t n t a a a a +==时,有223n t a a =,即 ()()422212243t r rt = 得 3213=t 此时刻的角位置为 rad 15.3423=+=t θ(3) 要使t n a a =,则有()()422212243t r rt = t =0.55s1 -25 一无风的下雨天,一列火车以v 1=20.0 m·s-1 的速度匀速前进,在车内的旅客看见玻璃窗外的雨滴和垂线成75°角下降.求雨滴下落的速度v2 .(设下降的雨滴作匀速运动)分析 这是一个相对运动的问题.设雨滴为研究对象,地面为静止参考系S,火车为动参考系S′.v 1 为S′相对S 的速度,v 2 为雨滴相对S的速度,利用相对运动速度的关系即可解.解 以地面为参考系,火车相对地面运动的速度为v 1 ,雨滴相对地面竖直下落的速度为v 2 ,旅客看到雨滴下落的速度v 2′为相对速度,它们之间的关系为1'22v v v += (如图所示),于是可得1o 12s m 36.575tan -⋅==v v 1 -26 如图(a)所示,一汽车在雨中沿直线行驶,其速率为v 1 ,下落雨滴的速度方向偏于竖直方向之前θ 角,速率为v 2′,若车后有一长方形物体,问车速v 1为多大时,此物体正好不会被雨水淋湿?分析 这也是一个相对运动的问题.可视雨点为研究对象,地面为静参考系S,汽车为动参考系S′.如图(a)所示,要使物体不被淋湿,在车上观察雨点下落的方向(即雨点相对于汽车的运动速度v 2′的方向)应满足hl αarctan≥.再由相对速度的矢量关系122v v v -=',即可求出所需车速v 1.解 由122v v v -='[图(b)],有θθαcos sin arctan221v v v -= 而要使hl αarctan ≥,则hl θθ≥-cos sin 221v v v ⎪⎭⎫ ⎝⎛+≥θh θl sin cos 21v v 1 -27 一人能在静水中以1.10 m·s-1 的速度划船前进.今欲横渡一宽为1.00 ×103 m 、水流速度为0.55 m·s-1 的大河.(1) 他若要从出发点横渡该河而到达正对岸的一点,那么应如何确定划行方向? 到达正对岸需多少时间? (2)如果希望用最短的时间过河,应如何确定划行方向? 船到达对岸的位置在什么地方?分析 船到达对岸所需时间是由船相对于岸的速度v 决定的.由于水流速度u 的存在, v 与船在静水中划行的速度v ′之间有v =u +v ′(如图所示).若要使船到达正对岸,则必须使v 沿正对岸方向;在划速一定的条件下,若要用最短时间过河,则必须使v 有极大值.解 (1) 由v =u +v ′可知v'=u αarcsin ,则船到达正对岸所需时间为 s 1005.1cos 3⨯='==αd d t v v (2) 由于αcos v v '=,在划速v ′一定的条件下,只有当α=0 时, v 最大(即v =v ′),此时,船过河时间t ′=d /v ′,船到达距正对岸为l 的下游处,且有m 100.52⨯='='=v d u t u l 1 -28 一质点相对观察者O 运动, 在任意时刻t , 其位置为x =v t , y =gt 2 /2,质点运动的轨迹为抛物线.若另一观察者O′以速率v 沿x 轴正向相对于O 运动.试问质点相对O′的轨迹和加速度如何?。
东南大学微机课件微机原理习题课_new1
例题2.3
指出下列传送类指令中, 指出下列传送类指令中,哪些是非法指令
(1)MOV DS,0100H ) , (2)MOV BP,AL ) , (3)MOV BX,AL ) , (4)XCHG AH,AL ) , (5)OUT 21H,AL ) , (6)OUT 310H,AL ) , (7)MOV [BP+DI],AX ) , (8)MOV [BX+CX],2130H ) , (9)AND AX,BL ) , (10)ADD AL,[BX+DX+10H] ) , (11)MOV CS:[2000H],AX ) : , (12) POP CS )
23
要点4:控制转移指令
①段内直接短转移:JMP SHORT label 段内直接短转移: 8位相对位移量,与下一条指令的地址差 -128~127。 位相对位移量, 位相对位移量 ~ 。 段内直接近转移: ②段内直接近转移:JMP NEAR PTR label 16位相对位移量。 范围 位相对位移量。 范围-32768~32767。 位相对位移量 。
11
例题
下面指令中,源操作数的寻址方式为直接寻址的指 令是() A.ADD AX,WORD PTR [BX+SI] B.ADD AX,DATA1 C.INC CX D.MOV BX,8FFFH 答案:B 解释:A为基址加变址;B中DATA1为一变量,作为 存储器操作数;C为寄存器寻址;D为立即数寻址。
19
要点3:串操作指令
注意“先期的准备工作” 注意“先期的准备工作”: 对相应的寻址寄存器进行( ①对相应的寻址寄存器进行(DS:SI、ES:DI)设置, 、 )设置, 注意段超越的问题。 注意段超越的问题。 根据自己的程序决定对存储区的操作方向 方向, ②根据自己的程序决定对存储区的操作方向,即对 DF的设置。 的设置。 的设置 若要进行重复操作时,一定要设置CX。 ③若要进行重复操作时,一定要设置 。 ④若要进行ZF的判别,注意判别条件的设置。 若要进行ZF的判别,注意判别条件的设置。 ZF的判别
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
03年考题
C
25
中断响应原理
中断实现: 中断源---中断请求---中断响应---中断服务---中断恢复
C保P护U断响点应:中F断L三AG个S条入件栈:;外IF设=0提T出F中=0断;申C请S、;I本P入中栈断;未被屏蔽; C保P护U现中场断:允P许U。SH指令将某些寄存器的内容压入堆栈;
26
中断响应过程
第6部分:模拟量输入输出
12
总线、接口概念
PCI/ISA/AGP RS-232、USB
13
14
• 微机的字长 : ALU的宽度、CPU内部数据总线的宽度
• 地址总线(AB)——单向 数据总线(DB )——双向 控制总线(CB)——每根线单向
15
I/O端口的编址方式
*I/O端口的编址方式有两种: (08考题 基本概念) 统一编址(存储器映象寻址方式):把系统中的每个I/O
10
例题
(08考题 基本概念)
答案:A
(06考题)
答案:D
11
第二次习题(复习)课
第4部分:半导体存储器 第5部分: 数字量输入输出
* 总线、接口概念 * 接口电路(芯片)、端口地址 * 数据传送方式 * 中断电路及其处理 *定时/计数器电路与应用 * 并行接口电路与应用 * 串行接口电路与应用 DMA电路与应用
IO总线
74LS74
D7
数据线
DQ
~
锁存器 1
D0 A15 地址线
~
A0
地址 译码
288H 0或
CLK
0
IOW
0门
Vcc 0
MOV AL, 81H MOV DX, 288H OUT DX, AL
简单I/O控制: 输出使能/锁存
22
*四种I/O方式
问题的提出:CPU与外设的工作速度不一致,尤其 是当外设由其他CPU或时序电路控制时更突出,如 何解决效率和可靠性?
2
例题
例题4.4:某系统的存储器中配备有两种芯片;容 量分别为2K×8的EPROM和容量为1K×8的 RAM。它采用74LS138译码器产生片选信号: Y0,Y1,Y2直接到三片EPROM(1#,2#, 3#);Y4,Y5则通过一组门电路产生四个片选 信号接到四片RAM(4#,5#,6#,和7#)。如 题图4-1,试确定每一片存储器的寻址范围。
IO总线 D7 ~ D0 A15 AB ~ A0
IOR
74LS244
DB
1Y1 1A1
D0
1Y2 1A2
…
…… 地址 218H G1 G2
D7
译码
三态缓冲器
0或0
0门
5V
K1 :
K8
简单I/O指令控制:
MOV DX, 218H
输入三态缓冲
IN AL, DX
21
*简单I/O:LED/八段数码管的连接
东南大学微机习题课 2part1new3
第二次习题(复习)课
第4章:半导体存储器 第5章: 数字量输入输出
总线、接口概念 *接口电路(芯片)、端口地址 * 数据传送方式 * 中断电路及其处理 *定时/计数器电路与应用 * 并行接口电路与应用 * 串行接口电路与应用 DMA电路与应用
第6章:模拟量输入输出
16
I/O接口技ቤተ መጻሕፍቲ ባይዱ—译码与片选
*所有接口电路的译码、指令操作(读图),简单互连
*设计I/O端口译码电路的方法
1. 根据端口地址确定地址信号A15~A0的条件取值,用 门电路、译码器及组合、PLD/GAL实现满足条件情况 的电路。 多种选择设计:可选常规,易实现 2. 设计I/O译码电路时: 端口的选通信号通常为低电平 有效,除端口的地址信号参加译码外,控制信号IOW、 IOR(IO/M、AEN也可参加译码)
*CPU步骤: ⑴获取中断类型号; ⑵将标志寄存器FLAGS的值入栈; ⑶将中断允许标志IF和单步标志TF清0——屏蔽外部其 它中断请求,避免CPU以单步方式执行中断处理程序; ⑷保护断点——将当前下一条指令的CS和IP的值入栈; ⑸根据中断类型号到中断向量表中找到中断向量,转入 相应中断服务子程序
无条件传送 程序I/O(查询)--三种端口数据/状态/控制及作用, 中断,效率较高,CPU响应较快,但传送由中断软 件完成 DMA,可以实现外设和存储器之间的数据高速传 送,不需要处理器。效率较高,硬件完成,但电路复 杂
23
中断及中断控制器8259
*中断概念: CPU与外设交换信息的一种重要方式 ==》硬件手段,改变CPU执行程序的顺序(程序流) 应用——外部中断的随机性,中断程序与其他程序的通信 (共享内存)
/CS, /OE, /WR 信号;无独立片选芯片
17
18
19
*简单I/O的连接方法
硬件连线: 开关转换(上拉电阻)和LED驱动(限流电阻)
另:P247 图5.11,经 反相器7406 后再接LED 接电阻到 VCC
20
*简单I/O:开关电平变换连接
*输入:三态缓冲器(244),输出:锁存器(273),可编程并 口芯片8255
9
例题
或
1# 8000H—87FFH 2# 8800H—8FFFH 3# 9000H—97FFH 4# A000H—A3FFH 5# A400H—A7FFH 6# A800H—ABFFH 7# AC00H—AFFFH
A15 A14 A13 A12 ,A11 A10 A9 A8 ,A7 A6 A5 A4 ,A3 A2 A1 A0 4# 1 0 1 0 0 0 5# 1 0 1 0 0 1 6# 1 0 1 0 1 0 7# 1 0 1 0 1 1
*分类 (1)外部中断 不可屏蔽中断NMI/可屏蔽中断INTR (2)内部中断
INT n:软中断 CPU的某些运算错误引起的中断:除法错、溢出 由调试程序debug设置的中断:单步/断点
*了解:中断屏蔽;中断优先级;中断嵌套; *掌握:中断处理过程,中断服务程序,现场保护。
24
中断向量表
中断向量表:中断服务程序入口地址表。8086/8088 系 统 允 许 处 理 256 种 类 型 的 中 断 , 对 应 类 型 号 为 0~FFH。在存储器的00000H~003FFH占1K字节空间 存放中断向量。
端口都看作一个存储单元,并与存储单元一样统一编址, 这样访问存储器的所有指令均可用来访问I/O端口,不用 设置专门的I/O指令。 单独编址(I/O指令寻址方式):对系统中的输入输出端 口地址单独编址,构成一个I/O空间,它们不占用存储空 间,而是用专门的IN指令和OUT指令来访问这种具有独 立地址空间的端口。 8086/8088CPU采用I/O指令寻址方式,用地址总线的低 16位(A15~A0)来寻址I/O端口,最多可以访问216=64K个 IO端口。 (可寻址220=1M内存空间)