第7章PIC单片机串行口及串行通信技术.pdf
第七章--串行口
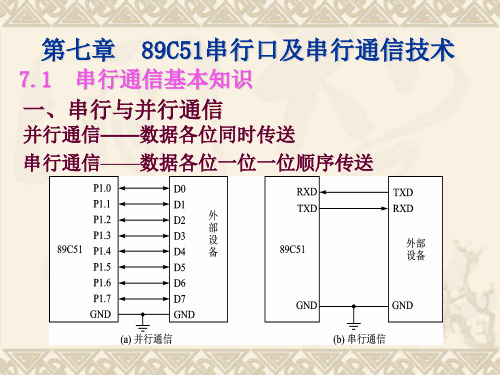
异步通信和同步通信 异步通信(Asynchronous Communication)
在异步通信中,数据通常是以字符(字节)为单位组成字符 帧传送的。字符帧由发送端一帧一帧地发送,通过传输线 由接收设备一帧一帧地接收。发送端和接收端可以有各自 的时钟来控制数据的发送和接收。 一个字符在异步传送中又称为一帧数据,字符帧也叫数据 帧,由起始位、数据位、奇偶校验位和停止位四部分组成, 如图7-2所示。
例如,波特率为2400b/s的通信系统,若采用图7-2(a) 的字符帧,则字符的实际传送速率为2400/11=218.18帧 /s;若采用图7-2(b)的字符帧,则字符的实际传送速率为 2400/14=171.43帧/s。
串 行 通 信 和 基 础 知 识
串行口的结构
MCS-51串行口结构框图如图7-4所示。 主要由两个物理上独立的串行数据缓冲寄存器SBUF、发送 控制器、接收控制器、输入移位寄存器和输出控制门组成。 两个特殊功能寄存器SCON和PCON用来控制串行口的工作方 式和波特率。 发送缓冲寄存器SBUF只能写,不能读;接收缓冲寄存器 SBUF只能读,不能写。两个缓冲寄存器共用一个地址99H, 可以用读/写指令区分。
7.1串行通信的基础知识
7.2 MCS-51的串行I/O口及控制寄存器
7.3 串行口的工作方式 7.4 波特率的设计 7.5 MCS-51串行口的应用 7.6 MCS-51串行口的多机通信
本章首先介绍串行通信的基本概念,然后重 点讨论MCS-51系列单片机串行口的特点和用法, 要求掌握串行口的概念、 MCS-51串行口的结构、 原理及应用。
在进行通讯时,外界数据是通过引脚RxD(P3.0,串行数据 接收端)和引脚TxD(P3.1,串行数据发送端)与外界进行串 行通信。 输入数据先进入输入移位寄存器,再送入接收SBUF。在此 采用了双缓冲结构。
第7章AT89C51单片机的串行口

RETI
;中断返回
2.方式2接收
SM0、SM1=10,且REN=1。数据由RXD端输入,接收11位信息。当 位检测到RXD从1到0的负跳变,并判断起始位有效后,开始收 一帧信息。在接收器完第9位数据后,需满足两个条件,才能 将接收到的数据送入SBUF。
(1)RI=0,意味着接收缓冲器为空。 (2)SM2=0或接收到的第9位数据位RB8=1时。 当上述两个条件满足时,接收到的数据送入SBUF(接收缓冲
正脉冲,串行口即把SBUF中的8位数据以fosc/12的固定波特 率从RXD引脚串行输出,低位在先,TXD引脚输出同步移位脉冲, 发送完8位数据置“1”中断标志位TI。时序如图7-5所示。 2.方式0接收 REN=1,接收数据,REN=0,禁止接收。
图7-5
REN=1,允许接收。向串口的SCON写入控制字(置为方式0,并 置“1”REN位,同时RI=0)时,产生一个正脉冲,串行口即 开始接收数据。RXD为数据输入端,TXD为移位脉冲信号输出 端,
图7-3 (1)SMOD—波特率选择位
例如:方式1的波特率的计算公式为:
方式1波特率=(2SMOD/32)×定时器T1的溢出率
也称SMOD位为波特率倍增位。
(2)GF1、GF0—通用标志位 这两个标志位可供用户使用,可用软件置1或清0。两个标志位
用户应充分利用。 (3)PD—掉电方式位 若PD=1,单片机进入掉电工作方式。
图7-9 时采样)进行表决以确认是否是真正的起始位(负跳变)的开始。 当一帧数据接收完,须同时满足两个条件,接收才真正有效。 ⑴ RI=0,即上一帧数据接收完成时,RI=1发出的中断请求已被
响应,SBUF中的数据已被取走,说明“接收SBUF”已空。 ⑵ SM2=0或收到的停止位=1(方式1时,停止位已进入RB8),
串行通信7章改
;查询结束,清RI
MOV A ,SBUF
;读数据到累加器
ACALL LOGSIM
;进行逻辑模拟
SJMP START
;准备下一次模拟
2.串行口方式1的应用
例3:在8051片内RAM30~4FH单元中有32个字节的数
据,若采用方式1进行串行通信,波特率为1200bit/s,
fosc=6MHz(SMOD=0),用查询和中断两种方式编写发
HERE:JNB TI,HERE CLR TI INC R0 DJNZ R7,LOOP SJMP $ END
查询方式
接收:
MAIN:
HERE:
ORG 0000H AJMP MAIN ORG 0030H MOV TMOD,#20H MOV TL1,#0F3H MOV TH1,#0F3H SETB TR1 MOV SCON,#50H MOV PCON,#00H MOV R0,#30H MOV R7,#20H JNB RI,HERE CLR RI
MAIN: MOV SP,#60H
HERE: AJMP HERE
MOV TMOD,#20H SER: CLR TI
MOV TH1,#0F3H
INC R0
MOV TL1,#0F3H
MOV A,@R0
SETB TR1
MOV SBUF,A
MOV SCON,#40H
DJNZ R7,HE
MOV R0,#30H
HERE: AJMP HERE
MOV TMOD,#20H SER: CLR RI
MOV TH1,#0F3H
MOV A,SBUF
同步通信数据格式
异步通信数据格式
四、通信数据的差错检测
(1)奇偶校验 在数据位后附加一个奇偶校验位,该位可为“0”
单片机 串口通信原理

单片机串口通信原理
单片机串口通信是指通过串行口进行数据的传输和接收。
串口通信原理是利用串行通信协议,将数据按照一定的格式进行传输和接收。
在单片机中,串口通信一般是通过UART(通用异步收发传输器)模块来实现的。
UART模块包括发送和接收两部分。
发送部分将数据从高位到低位逐位发送,接收部分则是将接收到的数据重新组装成完整的数据。
串口通信的原理是利用串行通信协议将发送的数据进行分帧传输。
在传输的过程中,数据被分成一个个的数据帧,每帧包括起始位、数据位、校验位和停止位。
起始位和停止位用于标识数据的开始和结束,数据位则是用来存放需要传输的数据。
校验位用于校验数据的正确性。
在发送端,单片机将需要发送的数据按照一定的格式组装成数据帧,然后通过UART发送出去。
在接收端,UART接收到的数据也是按照数据帧的格式进行解析,然后重新组装成完整的数据。
通过这样的方式,发送端和接收端可以进行数据的传输和接收。
串口通信具有简单、可靠性高、适应性强等优点,广泛应用于各种领域,如物联网、嵌入式系统等。
掌握串口通信原理对于单片机的应用开发具有重要意义。
《单片机原理及应用教程》第7章:单片机的串行通信及接口

第7章 串行通信
第7章 串行通信 7.3.1方式0
当SM0=0、SM1=0时,串行方式选择方式0。这种工作方式实质上 是一种同步移位寄存器方式。其数据传输波特率固定为(1/12)fOSC。数 据由RXD(P3.0)引脚输入或输出,同步移位时钟由TXD(P3.1)引脚输 出。接收/发送的是8位数据,传输时低位在前。帧格式如下:
D7 SD7 D6 SD6 D5 SD5 D4 SD4 D3 SD3 D2 SD2 D1 SD1 D0 SD0
写SBUF(MOV SBUF,A),访问发送数据寄存器; 读SBUF(MOV A,SBUF),访问接收数据寄存器。
第7章 串行通信
7.3 AT89S51单片机的串行口工作方式
AT89S51单片机的串行口工作方式由控制寄存器中的SM0、SM1决 定,具体如表7-1所示: 表7-1 串行口工作方式选择位SM0、SM1 SM0 0 0 1 1 SM1 0 1 0 1 工作方式 方式0 方式1 方式2 方式3 特 点 8位移位寄存器 10位UART 11位UART 11位UART 波 fOSC/12 可变 fOSC/64或fOSC/32 可变 特 率
SM2
9CH
REN
9BH
TB8
9AH
RB8
99H
TI
98H
RI
其中,各位的含义如下: SM0,SM1—串行口工作方式选择位。其功能见表格7-1。 SM2—允许方式2、3中的多处理机通信位。 方式0时,SM2=0。 方式1时,SM2=1,只有接收到有效的停止位,RI才置1。 方式2和方式3时,若SM2=1,如果接收到的第九位数据(RB8)为0, RI置0;如果接收到的第九位数据(RB8)为1,RI置1。这种功能可用于 多处理机通信中。
每当接收移位寄存器左移一位,原写入的“1111 1110”也左移一位。当最 右边的0移到最左边时,标志着接收控制器要进行最后一次移位。在最后一 次移位即将结束时,接收移位寄存器的内容送入接收缓冲器SBUF,然后在 启动接收的第10个机器周期时,清除接收信号,置位RI。
《单片机原理及接口技术》第7章习题及答案

《单片机原理及接口技术》(第2版)人民邮电出版社第7章 AT89S51单片机的串行口思考题及习题71.帧格式为1个起始位,8个数据位和1个停止位的异步串行通信方式是方式。
答:方式1。
2.在串行通信中,收发双方对波特率的设定应该是的。
答:相等的。
3.下列选项中,是正确的。
A.串行口通信的第9数据位的功能可由用户定义。
对B.发送数据的第9数据位的内容是在SCON寄存器的TB8位中预先准备好的。
对C.串行通信帧发送时,指令把TB8位的状态送入发送SBUF中。
错D.串行通信接收到的第9位数据送SCON寄存器的RB8中保存。
对E.串行口方式1的波特率是可变的,通过定时器/计数器T1的溢出率设定。
对4.通过串行口发送或接收数据时,在程序中应使用。
A.MOVC指令B.MOVX指令 C.MOV指令 D.XCHD指令答:C5.串行口工作方式1的波特率是。
A.固定的,为f osc/32 B.固定的,为f osc/16C.可变的,通过定时器/计数器T1的溢出率设定D.固定的,为f osc/64答:C6.在异步串行通信中,接收方是如何知道发送方开始发送数据的?答:当接收方检测到RXD端从1到0的跳变时就启动检测器,接收的值是3次连续采样,取其中2次相同的值,以确认是否是真正的起始位的开始,这样能较好地消除干扰引起的影响,以保证可靠无误的开始接受数据。
7.AT89S51单片机的串行口有几种工作方式?有几种帧格式?各种工作方式的波特率如何确定?答:串行口有4种工作方式:方式0、方式1、方式2、方式3;有3种帧格式,方式2和3具有相同的帧格式;方式0的发送和接收都以fosc/12为固定波特率,方式1的波特率=2SMOD /32×定时器T1的溢出率方式2的波特率=2SMOD /64×fosc方式3的波特率=2SMOD /32×定时器T1的溢出率8.假定串行口串行发送的字符格式为1个起始位、8个数据位、1个奇校验位、1个停止位,请画出传送字符“B ”的帧格式。
第7章串行口

一、 89C51串行口 1、结 构
图7-7 串行口内部结构示意简图
☞ 2、串行口控制字及控制寄存器
串行口控制寄存器SCON(98H)
• ①SM0和SM1(SCON.7,SCON.6)——串行
口工作方式选择位。两个选择位对应4种通信方式,
如表7-1所示。其中,fosc是振荡频率。
3、串行通信工作方式
2 SMOD f osc 16 / 2 初值 串行方式1、方式3波特率≌ 32 12
4、波特率设计
• 定时器T1用作波特率发生器时,通常选用定时器模 式2(自动重装初值定时器)比较实用。每过“28-X” 个机器周期,定时器T1就会产生一次溢出。
• T1溢出速率为 T1溢出速率≌(fosc/12)/(28-X)
移位时钟来源不同,因此,各种方式的波特率计算公式也
不同。
4、波特率设计
• (1)方式0的波特率 由图7-14可见,方式0时,发送或接收一位数据的移位 时钟脉冲由S6(即第6个状态周期,第12个节拍)给出, 即每个机器周期产生一个移位时钟,发送或接收一位数据。
因此,波特率固定为振荡频率的1/12,并不受PCON寄存
TxD输出移位时钟,频率=fosc1/12;
每接收 8位数据RI就自动置1;
需要用软件清零 RI。
☞经常配合“串入并出”“并入串出”移位 寄存器一起使用扩展接口
☞方式0工作时,多用查询方式编程: 发送:MOV SBUF,A 接收:JNB RI,$ JNB TI,$ CLR RI CLR TI MOV A, SBUF ☞复位时,SCON 已经被清零,缺省值: 方式0。 ☞接收前,务必先置位 REN=1 允许接收数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第7章PIC18FXX2串行口及串行通信技术
•教学目标
串行通信基本知识
串行口及应用
PIC18FXX2与PC机间通信软件的设计
本章知识点概要
• 1.什么是串行通信,串行通信有什么优点?
• 2.串行通信协议
• 3.什么是波特率?
• 4.PIC18FXX2中的串行口工作方式及应用
• 5.PIC18FXX2点对点通信
•针对PIC18FXX2串行口而言,概括为以下问题:
1、波特率设计,初始化SPBRG
2、设定通信协议(工作方式选择,SYNC)
3、如何启动PIC18FXX2接收、发送数据?
4、如何检查数据是否接收或发送完毕?
7.1 7.1 串行通信基本知识串行通信基本知识
•在实际工作中,计算机的CPU 与外部设备之间常常要进行信息交换,一台计算机与其他计算机之间也要交换信息,所有这些信息交换均可称为通信。
•通信方式有两种,即并行通信和串行通信。
•采用哪种通信方式?----通常根据信息传送的距离决定例如,PC 机与外部设备(如打印机等)通信时,如果距离小于30 m ,可采用并行通信方式;当距离大于30 m 时,则要采用串行通信方式。
PIC18FXX2单片机具有并行和串行二种基本通信方式。
并行通信
•并行通信是指数据的各
位同时进行传送(发送
或接收)的通信方式。
•优点:传送速度快;
•缺点:数据有多少位,
就需要多少根传送线。
•例如,右图PIC18FXX2
单片机与外部设备之间
的数据传送就属于并行
通信。
串行通信
•串行通信是指数据一位(bit)一位按顺序传送的通信方式。
•优点:只需一对传输线(利用电话线就可作为传输线),大大降低了传送成本,特别适用于远距离通信;
•缺点:传送速度较低。
假设并行传送N位数据所需时间为T,那么串行传送的时间至少为N*T,实际上总是大于N*T。
接收设备发送设备
D2
D1
D0
D3
D7
D6
D5
D4
串行通信的传输方式
•串行通信的传输方式通常有三种:
单向(或单工)方式,只允许数据向一个方向传送;
半双向(或半双工)方式,允许数据向两个方向中的任一方向传送,但每次只能有一个站点发送;
全双向(或全双工)方式,允许同时双向传送数据,因此,全双工配置是一对单向配置,它要求两端的通信设备都具有完整和独立的发送和接受能力。