液滴速度监控
液体点滴速度监控装置
液体点滴速度监控装置2007年6月9日摘要:液体点滴速度监控系统是能够实现自动监控液滴的速度并且能做出相应调整的自动控制系统。
本文对系统如何实现自动监测、自动调节等功能作了详细的分析和研究,利用光电传感器采集液滴的速度变化信号和液位高度信号,用AT89S52作为中央处理器进行信号分析和处理,利用建立的模型通过直流电机进行控制液滴速度。
主从站采用MAX487E 与单片机系统构成RS-485通讯接口进行数据和控制信息的传送。
问题重述一、任务设计并制作一个液体点滴速度监测与控制装置,示意图如右图所示。
二、要求1、基本要求(1)在滴斗处检测点滴速度,并制作一个数显装置,能动态显示点滴速度(滴/分)。
(2)通过改变h 2控制点滴速度,如右图所示;也可以通过控制输液软管夹头的松紧等其它方式来控制点滴速度。
点滴速度可用键盘设定并显示,设定范围为20~150(滴/分),控制误差范围为设定值±10%±1滴。
(3)调整时间≤3分钟(从改变设定值起到点滴速度基本稳定,能人工读出数据为止)。
(4)当h 1降到警戒值(2~3cm )时,能发出报警信号。
2、发挥部分 设计并制作一个由主站控制16个从站的有线监控系统。
16个从站中,只有一个从站是按基本要求制作的一套点滴速度监控装置,其它从站为模拟从站 (仅要求制作一个模拟从站)。
(1)主站功能:a .具有定点和巡回检测两种方式。
b .可显示从站传输过来的从站号和点滴速度。
c .在巡回检测时,主站能任意设定要查询的从站数量、从站号和各从站的点滴速度。
d .收到从站发来的报警信号后,能声光报警并显示相应的从站号;可用手动方式解除报警状态。
(2)从站功能:a .能输出从站号、点滴速度和报警信号;从站号和点滴速度可以任意设定。
b .接收主站设定的点滴速度信息并显示。
c .对异常情况进行报警。
(3)主站和从站间的通信方式不限,通信协议自定,但应尽量减少信号传输线的数量。
【精品】液体点滴速度监控装置点滴速度控制及检测
(1)前言(2)目前医院使用的点滴输液装置是将液体容器挂在一定的高度上,利用势能差将液体输入到病人的体内(图1),通过软管口径的压紧和放松来控制点滴速度。
有经验的医护人员可以根据药剂的特性对点滴速进行控制,但是一般的病人却无法做到,控制不好还有一定的危险性。
在一些大医院一个护士常常需要负责十几个、甚至几十个床位的液体点滴,很容易出现混乱局面,导致工作效率降低.为了提高医院本身的管理水平和工作效率,减轻医护人员的劳动强度,对于可以进行自助式护理的病人来说,需要一种可以由病人自己操作,自动定时、定量向病人进行输液的装置;而对于医护人员来说,需要一种可以对所有的病人进行统一监控的智能监控装置。
本设计就是针对以上问题而做的智能型液体点滴速度监控装置。
设计要求为能有以下几种功能:(3)检测输液点滴速度(4)检测输液点滴高度(5)控制点滴速度(6)显示点滴速度能设置点滴速度图1第一章硬件设计说明1.1系统简介本设计分为主机控制,从机测量,主从通信三个框架。
由从机测量并控制点滴速度,得到的数据送到单片机进行处理,再通过RS485通信将数据反馈给主机进行显示处理,主机也可以通过RS485通信对从机进行控制.本人负责点滴速度检测及控制部分.系统框图(图2)如下:图2系统框图1。
2方案设计过程及实现方法1.2。
1点滴速度检测电路设计点滴速检测是整个系统的核心,检测精度是衡量系统精确性的一个最重要指标。
这样就不会因为点滴速度异常而使患者面临危险。
出于安全性考虑,在检测点滴速度时不能使原胶管破损,否则就会对输液造成严重感染而影响患者,因此在检测点滴速度时要用非接触的方式。
方案一:利用发射型光电传感器,传感器工作时,当物体经过射程之内,就会对红外光进行反射,传感器接受到这个感反射信号后动作,以检测物体稳定动作的最大距离。
但是光电传感器对各种介质的反射程度不同,对水的动作距离近,对玻璃的动作距离远。
而且光电传感器体积较大,需要距离滴斗一定距离才能分辨不同介质,无法安装在合适的位置上,所以最终放弃这种方案。
液体点滴速度监控装置
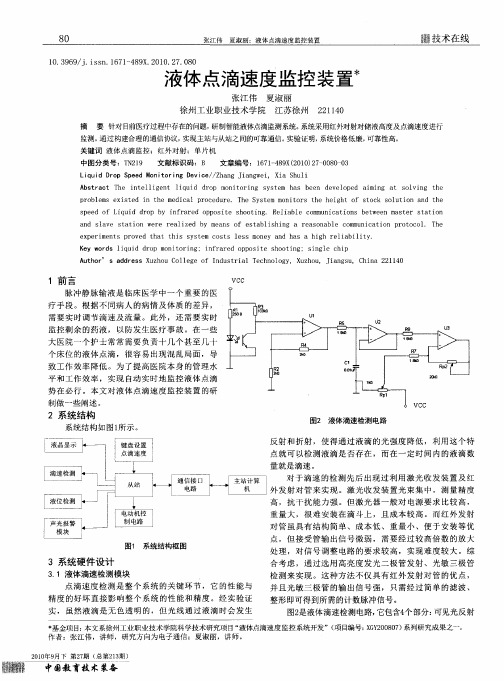
处理 ,对 信 号调 整 电路 的要 求 较 高 ,实 现 难度 较 大 。 综 合考 虑 ,通 过选 用 高 亮度 发 光 二 极 管发 射 、光 敏 三 极 管 检测 来 实 现 。这 种 方 法不 仅 具 有 红 外发 射对 管 的优 点 , 并且 光 敏 三 极管 的输 出信 号 强 , 只 需经 过 简单 的滤波 、 整形 即可得 到所 需的计 数脉冲 信号 。 图2 是液体 滴速检 测 电路 , 它包含4 部分 : 个 可见 光反 射
3系统硬件设计
3 1液体 滴速检 测模 块 .
Ab tr c T e n l i e 1 q d r p on t ri g s s m as s a t h i te 1 g nt i ui d o m i o n y te h be n e el pe a mi g e d v o d i n at ol i g he s v n t p o e s x s ed n h me i al r ce u e. T e Sy te m ni o t e r bl m e i t i t e d c p o d r h s m o t rs h he g o s o k o u o a t i ht f t c s l ti n nd he sed f p e o Li ui d o b i f ar d p os t s o i g R i bl c m ni ti ns e w e m t r t i n q d r p y n r e o p i e h ot n . el a e o mu ca o b t e n as e s ar o an Sl ve t ti n d a s a o we e r re li d a ze by me ns f s a i hi g r as n bl c m uni at o p ot c . Th a o e t bl s n a e o a e o m c i n r o o1 e ex e me ts r ve ha t S ys e c s l ss mo y nd as hi h el a 1 t p ri n p o d t t hi s t m o ts e ne a h a g r i bi i y. Ke w d 1 q d r p o t ri y or s i ui d o m ni o ng: i r r o po t s oo i g: Si l c p nf a ed p si e h t n ng e hi
液体点滴速度监控系统设计
液体点滴速度监控系统设计摘要:本设计研制了一种液体点滴速度监控系统。
该系统以单片机为核心,可以实现自动检测并显示液体点滴的速度、用键盘设定点滴速度和对异常情况进行声光报警等功能。
采用红外光电传感器检测液位信号,通过硬件滤波和保护装置消除杂散光干扰。
并能通过上位机与下位机之间的串行通信,实现对多台下位机进行远程监控与管理。
该系统工作稳定、操作简便,能有效的解决目前简易液体点滴装置和输液泵之间的空缺,在医疗卫生领域中具有广泛的应用前景。
关键词:点滴速度,单片机,串行通信,步进电机Abstract:The monitoring system for the transfusion was developed with microcontroller unit used as a core. The system realizes auto detection and display of the drip velocity. The drip velocity can be set by keyboard and the abnormal event alarm has achieved. The signal of the liquid level was detected by the infrared photoelectric sensor, and the interference of abnormal light was eliminated by the hardware filter and the protect device. In addition, the remote monitoring and managing of several lower computers was achieved by serial communication. The system is stable in performance and simple in operation. The system has bright application future in medical treatment field.Keywords:Dropping speed, Microcontroller unit, Serial communication, Stepping motor目录1前言 (1)1.1 设计背景 (1)1.2 设计目标 (1)1.3 技术路线 (1)1.4 实施计划 (2)1.5 必备条件 (2)2总体方案设计 (3)2.1 方案比较 (4)2.1.1 滴速检测方案 (4)2.1.2 液位检测方案 (4)2.1.3 滴速控制方案 (4)2.1.4 电机选择方案 (5)2.1.5 点滴速度计算方案 (5)3单元模块设计 (7)3.1 各单元模块功能介绍及电路设计 (7)3.1.1 滴速检测模块设计 (7)3.1.2 液位检测模块设计 (7)3.1.3 电机驱动模块设计 (8)3.1.4 声光报警模块设计 (10)3.1.5 键盘模块设计 (10)3.1.6 显示模块设计 (11)3.1.7 通信模块设计 (12)3.1.8 中央控制模块设计 (13)3.1.9 电源模块设计 (14)3.2 电路参数的计算及元器件的选择 (14)3.2.1 时钟电路 (15)3.2.2 复位电路 (15)3.3 功能器件的介绍 (15)3.3.1 AT89C51介绍 (16)3.3.2 8255A介绍 (18)4软件设计 (24)4.1 软件设计所用工具 (24)4.2 软件结构图 (24)4.3 软件流程框图 (25)4.3.1 上位机软件流程框图 (25)4.3.2 下位机软件流程框图 (26)4.3.3 上、下位机通信软件流程框图 (28)5系统调试 (31)6系统功能、指标参数 (38)6.1 系统能实现的功能 (38)6.2 系统指标参数测试 (38)6.2.1 点滴速度测试 (38)6.2.2 报警功能测试 (39)6.3 系统功能及指标参数分析 (39)7结论 (40)8总结与体会 (42)9谢辞 (43)10参考文献 (44)附1 系统的原理电路图 (45)附2 外文文献翻译-译文 (46)附3 外文文献翻译-原文 (56)1前言随着医院管理系统趋向于电子化、网络化,利用单片机与现代控制技术提高医疗器械的自动化程度成为目前主要应用方向之一。
液体点滴速度监控

• (2)储液检测电路仍然采纳红外对管发射 接收装置。
• (3)点滴速度控制是利用电动机正反转来 调节储液瓶的高度来实现的。
• (4)数码管显示当前的滴速,同时显示调 节的速度。
3
速度部分大致思路:
转动系统
信号采集系统
显示电路
单片机处理电路
4
光电探测器
实验要求:
1
组内组合:任务分配稍微明确,由我和朱立负责硬
件和文章部分,软件大部分由王忠印负责。
硬件部分
光电传感器、比较器、数码管 直流驱动电路、输入键盘 报警电路等等
本实验分为
软件部分
键盘、PWM、测速 电机控制程序、数码管显示
2
系统最终方案确定
• 根据以上方案的论证分析,结合器件与设 备等因素,系统各模块方案确定如下:
• 解决方案:使用430程序框架+官方程序改 编。
12
5
比较器:
6
直流电机驱动电路图
7
显示+键盘电路:
8
• 本次练手历尽各种磨练终于比较顺利的完 成了实验所要求的任务;
• 当然在这之中也遇到了许许多多的问题, 但在我们三人组合的讨论和老师的帮助下 基本上一一被解决。程序和电路大部分实 现原创性,但这之中还有很多瑕疵,需要 以后有时间时再做改进。
9
问题一:
• 选择大瓶时,电动机带动不了,转速跟不 上,瓶子基本处于不动状态,而且电压源 12V电压会被强制下拉。
解决方案: 更换小瓶,电机转ቤተ መጻሕፍቲ ባይዱ比大瓶好了很多
10
问题二
• 电机一度只会上升不能下降,速度刷新不 了
解决方法: 经过层层修改演示,发现判断条件有疏漏。
液体点滴滴速监控讲义
4、主从站通讯电路
从站号
74ls154 高四位数据线
地址兼数 低四位据 线
通讯协议——设置命令
通讯协议——查询命令
通讯协议——清除警报命令
5、电机控制电路
软件设计
1.从站主函数流程图
2.端口1中断函数流程图
3. 端口2中断函数流程图
4. 看门狗定时中断流程图
5. 主站主函数流程图
系统原理
本设计为液体点滴速度监控装置,采用MSP430F149 作为核心,两块系统板(主站和从站)组成有线监控装 置,实现了对液体点滴速度的定点检测与循环检测,且 动态显示点滴速度。速度检测采用主动红外发射接收管, 通过放大,整形输出脉冲,送单片机进行计数,以检测 其速度。键盘采用4x4矩阵键盘,可通过按键设置液体点 滴速度,并使用步进电机进行速度控制;显示采用12864, 可以动态显示点滴速度及设定,通信等信息。报警检测 也采用红外发射接收管,报警装置是由发光二极管和蜂 鸣器组成的声光报警。为了达到较好的调整稳定度,通 过软件实现控制电路的自适应调节,实现了多机通信, 即一个主机站控制多个从机站和主、从机之间的数据传 输。
3. 点滴速度控制方案选择
方案一:通过改变输液瓶高度控制垫底速度。滴斗到 受液瓶的高度H2来调节点滴的速度,由电动机带动储液 瓶使储液瓶上升或下降改变滴斗到受液瓶的高度H2,从 而改变液体压强差,调节点滴速度。 方案二:通过控制滴速夹的松紧来控制点滴的速度。 在输液瓶高度确定的条件下,通过改变输液管导通横截 面积实现点滴速度的控制。 综合分析:方案一采用步进电机调节输液瓶高度,通 过高度与点滴速度的关系实现PID控制,容易较实现。方 案二由于输液管横截面积小,变形后恢复速度缓慢,安 装工艺要求高,难以控制。综合我们选择方案一。
液体点滴速度监控系统的设计设计
液体滴落检测与计数摘要输液是医院常用的治疗手段,传统输液过程中存在着输液速度不精确、需要人工监护等弊端。
本文的目标就是设计一种输液监控系统以解决此问题。
本文设计的液体点滴速度监控装置系统,实现了对输液速度的检测与控制,实现了对储液瓶中液面高度的检测报警,并且动态显示输液速度。
使用者可以通过按键设置输液速度,系统将自动对输液速度进行控制。
当输液结束或输液速度发生异常时,使用发光二极管和蜂鸣器进行报警,继而实现对输液瓶的控制。
系统以80C52单片机为核心,实现对输液瓶控制及液体点滴速度的显示和液体点滴速度的键盘控制;通过外围电路检测储液瓶中液面高度和液体点滴速度;通过实现对步进电机控制以实现对储液瓶高低的控制,来实现控制液体点滴速度。
在整体方案设计中,在保证设计系统能达到的题目要求的精度和稳定度的前提下,考虑到系统的轻便性、实用性、可靠性,经济性,对电路系统进行了优化。
关键词:点滴速度;光电传感器;步进电机;单片机目录任务与要求 (5)一、绪论 (5)1.1课题背景 (5)1.2课题研究的目的和意义 (6)1.3课题的思路及主要框图结构 (6)二、方案比较与论证 (7)2.1控制方案的比较 (7)2.2点滴检测方案比较 (7)2.3液位监测方案比较 (7)2.4速度控制方案 (8)2.5电机的选择 (8)三、系统的硬件设计 (9)3.1系统的硬件设计 (9)3.2.1中央处理单元 (9)3.2.2点滴信号检测单元 (10)3.2.3点滴信号的比较、滤波、整形电路 (11)3.2.4液位检测单元 (11)3.2.5检测电路的抗干扰措施 (12)3.2.6声光报警电路 (13)3.2.7步进电机驱动单元(高度调整单元) (14)3.2.8键盘单元 (14)3.2.9数码管显示单元 (16)3.3芯片时钟电路 (17)3.5复位单元 (17)3.6供电单元 (18)四、液体点滴监控系统的软件设计 (19)4.1各模块软件设计 (19)4.1.1主控模块设计 (19)4.1.2点滴速度测量模块设计 (19)4.1.3电机控制算法 (21)4.1.3.1电机控制原理 (21)4.1.3.2点滴速度控制 (21)4.1.5报警模块设计 (23)4.2.2输入键盘模块的设计 (24)4.4.3数码管显示模块的设计 (24)参考文献 (27)附录 (28)液体滴落检测与计数难度系数:1.0一、任务医用吊瓶注射如图所示,需要检测液体滴落速度和数量。
液体点滴速度监控系统的设计
液体点滴速度监控系统的设计该系统主要由硬件和软件两部分组成。
硬件部分包括传感器、控制器、显示器和报警器;软件部分则负责数据处理和显示。
首先,我们需要选择适合的流速传感器。
传感器可以通过各种方式测量流体的速度,比如利用涡街传感器、超声波传感器或者压力传感器。
根据实际需要以及成本等因素,选择合适的传感器。
在液体点滴管路中添加一个流速传感器,传感器会通过传感器信号转换为电信号,并输入到控制器中进行处理。
控制器会对传感器获得的电信号进行放大、滤波等处理,得到准确的液体流速数据。
为了实现实时监测,监控系统需要进行数据处理和显示。
控制器会将处理好的流速数据传输到计算机或者显示器上,并显示在屏幕上。
同时,系统可以设置不同的报警阈值,当液体的流速超过或者低于设定的范围时,报警器可以发出声音或者进行其他形式的报警,提醒医护人员进行处理。
为了确保系统的准确性和稳定性,我们需要进行校准和稳定性测试。
校准可以通过将已知流速的溶液通过系统,与测量值进行比对来实现。
稳定性测试可以通过长时间的运行和监测,检测系统的稳定性和精度。
设计一个完善的液体点滴速度监控系统还需要考虑以下几个方面:1.系统的可靠性和稳定性:在设计和选择硬件设备时,应注意设备的质量和稳定性。
同时,要保证系统能够长时间稳定运行,以便实时监测液体的流速。
2.软件的易用性:设计一个用户友好的界面和操作系统,使医护人员能够方便地使用和操作该系统。
对于不同的用户,可以提供不同的操作模式和权限。
3.数据的存储和分析:系统应具备将数据存储和分析的功能,以便日后查看和分析。
可以将数据存储在本地或者云端,以便随时调取。
4.系统的可拓展性:系统应具备可拓展的功能,比如可以与其他设备进行数据交互、或者可以设置多个液体点滴的监控等。
综上所述,液体点滴速度监控系统是一种用于监测和保障患者安全的设备。
通过选择合适的硬件和软件,进行适当的校准和测试,可以设计出一个高度可靠和准确的液体点滴速度监控系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液体点滴速度监控装置Moniting and controlling system of liquid drop speed廖军周盛郑忠军温州师范学院01电子信息学生,温州,325027摘要:利用单片机设计并制作一个智能化的液体点滴速度监测与控制装置。
该装置由水滴速度测试系统、水速控制系统、显示装置、单片机系统、键盘和报警等系统组成。
应用水的压强随着高度差的变化而变化的原理,利用控制步进电动机的升降来控制点滴速度。
点滴速度可用键盘来设定,设定范围为20~150(滴/分),控制误差范围在10% 1滴左右。
从改变设定值起到点滴速度基本稳定整个过程的调整时间小于3分钟。
同时在水到达警戒线以下时能发出报警信号。
关键字:点滴速度,红外传感,步进电动机,51单片机1.引言目前大小医院中所使用的静脉输液器都是悬挂在病人的上首才能输液,输液速度难以准确限制,这对特护病人和对输液速度有较严格的病人是不方便的。
目前的输液监控报警器笨重、体积大、价格太高,增加医院和病人的费用。
所以如果有液体点滴速度监控装置,必将深受医务人员和病人的欢迎。
因为它有许多的优点,如:可以用按键准确控制速度,可以报警,设备结构简单,费用低等。
所以对液体点滴速度监控的研究十分有意义。
本设计包括以下几部分。
2.方案设计与论证根据题目要求,系统可以划分为几个基本模块,如图6-1所示。
图6-12.1 速度监控的方法利用步进电动机和压强的原理来控制水滴的速度,由公式:P=ρ·g ·h可以知道由于液面高度的从而压强也不同,从而改变液滴的速度。
这样的系统比控制输液软管的松紧更好控制,而且比较容易实现,1米8的高度足以实现速度从20~150(滴/分)的调节。
首先我们利用实验先大概的测出对应的高度所对应的水滴速度,并记下来存在单片机内,到时候就直接调出来。
在滴斗处用红外系统来测量水滴的速度,再在储液瓶到瓶口3cm处装一个红外系统来监控水位。
当在键盘上按入某个点滴速度时,从单片机内调出相对应的某一个高度,然后控制步进电动机转动进行粗调,再利用红外系统进行反馈来细调,直到红外反馈和所按的速度一样为止。
这是软件编程的一种算法,另一种算法也可采用折半查找法,但是由实验已得知其高度与液体滴速成较精确的线性关系(如图6—2所示),所以我们采用了直接粗调与细调相结合的方法。
调好以后由于液面的下降和一些其他的因素,又会产生一些速度的变化,或者本身水滴的速度又不是均匀的,所以调好以后速度有可能自身就会发生变化。
可以利用红外监控,智能化的调整高度来控制速度,就是利用单片机来随时的自我调整。
这样使系统的难度变成用软件来解决,更加的合理,而且更加准确,误差很小。
对各模块的实现,分别有以下一些的设计方案:2.2 步进电动机的驱动要使步进电动机输出足够的转矩以驱动负载工作,必须对控制信号进行放大,实现这一功能的电路称为步进电动机驱动电路或功放电路。
驱动电路是步进电动机应用的关键,是影响其性能发挥和可靠运行的一个最重要因素。
常见的步进电动机驱动电路有三种:双电源驱动电路、斩波限流驱动电路和单电源驱动电路,其中单电源驱动电路采用单一电源供电,结构简单,成本低,但电流波形差,效率底,出力小,主要用于对速度要求不高的小型步进电机的驱动。
虽然像斩波限流驱动电路比较的常用,性能也比较好,但基于实际应用和成本等的考虑,我们选用单电源驱动电路就可以了。
2.3 红外测速红外传感器已经在现代化的生产实践中发挥着它的巨大作用,随着探测设备和其他部分的技术的提高,红外传感器能够拥有更多的性能和更好的灵敏度。
所以利用红外传感器来测量水滴的速度比较好。
因为利用反射式红外传感器很难进行对水的判断,而利用对射式红外传感器,虽然水对红外的遮挡比较弱,但相对反射来说又会强一点。
经过实验发现对射式红外传感器能比较灵敏的测出水滴。
总之,经过一番仔细的论证与比较,我们决定了系统各个主要模块的最终方案如下:电机控速模块:用步进电机来控制储液瓶的高度来达到控速的目的。
图3步进电机的驱动:采用硬件驱动。
红外测速:采用对射式红外传系统。
大概的外型如图3所示。
3.系统的具体设计与实现系统组成及原理框图如图4所示。
以下分为硬件和软件两个方面进行具的分析。
图4系统的硬件设计3.1.1步进电机部分随着生产过程机械化、电气化和自动化的不断发展,出现了各种类型的特种电动机。
这些电动机的工作原理,一般与普通的异步电动机和直流电动机的基本原理近似,但是它们在性能、结构、生产工艺上各有其特殊性,多用于自动控制过程中。
步进电机就是其中的一种。
步进电机是工业过程控制及仪表中的主要控制元件之一。
步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
3.1.2红外测速红外传感器是作为光电传感器的一种,我们先来介绍一下反射式红外传感器,它是一种可以利用其对物体表面黑度的敏感特性,应用于测量微小的位移。
从光源红外发射管发射出的一定强度的光束到达测量面后,根据物体表面的不同黑度和表面光洁度,部分光散射和反射到红外敏感接收管转变成为和接收管接收到的光强成正比的电信号。
若在具有同样表面光洁度的一块测量面上涂上黑白涂料,有意造成反射光强的不同。
当红外光束的光斑从黑色移动到白色区域时,接收管输出的电信号将产生一个阶跃,阶跃的过程主要取决于光斑的大小、测量面的移动及电信号响应的速度等。
虽然水滴的速度不快,红外线足以响应,但是水是透明的不好反射,它的反射信号几乎没有,所以利用反射式红外传感很难测到信号。
现在我们来看一下对射式红外传感器,其原理和反射式红外传感器差不多,只不过我们经过实验发现对射式红外传感器对水滴的测量信号会更好一些。
对射式光电传感器(以下简称为传感器) 分为投光器和受光器两部分.两者光轴重合在同一直线上。
工作时,投光器发出调制光,被受光器接收,变为电信号。
当被测体进入检测区时,光被遮挡,受光器无光可受.传感器输出状态改变。
光电传感器因为检测无接触、检测距离大、检测精度高而广泛应用于测距、测速、计数、行程控制等。
然而,传感器工作一段时间后,调整好的光轴会发生变化,透镜表面会吸附尘埃、油污,这些引起检测距离减小,甚至无法检测。
因为我们测的是点滴管比较小,而且是贴在上面的,所以干扰会比较小一点,但是我们还是不能忽略了这一点,尽量的减少误差。
具体的电路如图5所示。
图5因为单片机是对负脉冲有效,而对射式光电传感器在没有东西遮挡时受光器端是低电平,有东西遮挡时是高电平,即测量水滴速度时产生的是正脉冲,所以在受光器端和单片机之间加一个非门把正脉冲变成负脉冲。
3.2 系统的软件设计单片机控制电路主要由一片80C51组成。
80C51主要实现对点滴速度的测量并对步进电动机进行控制来调水滴速度和对水位进行判断并声光报警,而且还负责速度和距离关系的一些计算。
单片机是整个系统的核心和控制中心,各系统的数据都是送到单片机进行处理,而且所有的命令都是由单片机发出,所以对单片机的软件设计是非常重要的,它关系的整个系统的功能。
单片机具体电路如图6-7所示。
图63.2.1主要的软件流程图,如图6-8所示:主程序初始化并显示当前的水滴速度,并开两个外部中断,两个内部中断。
由于本系统的重点相对其他的智能化系统来说硬件会比较重要一点,系统的稳定度受客观的影响比较大,所以主程序也相对比较的简单。
外部中断0 是用来监视键盘的,一但有人按了键盘输入某个水滴速度时,单片机就会与单前的速度相比较,速度比它小单片机就控制步进电动机往上拉,速度比它大时单片机就会控制电动机往下调。
在调整的同时单片机又会定时的进行不断反馈,以便更好的控制。
并把当前的水滴速度显示在数码管上。
外部中断1 是用来监视水位的。
一旦水没有堵在光电传感器之间,单片机就会检测到,并且发出警报信号。
图7除以上的功能外,还有水滴的速度测量是通过计算脉冲来实现的,但有时候滴液斗的壁上会有小水珠出现,所以我们设计了一个判断程序,以减少误差。
在水位报警的时候用一个沿时来判断是不是水珠,以免误报,错报等。
4.实际测试利用直尺和秒表测量在不同的高度所对应的水滴速度。
如图8所示。
我们可以看出他们的关系基本上是成正比的。
而且基本上和显示的数值的误差不大,在滴速快的高度误差会高一点。
5.结束语本设计应用的硬件比较多,而且应用到了两处的红外传感器,所以系统很容易受到外界的影响,自然影响很大。
虽然我们应用了单片机的智能控制,但是受一些影响是难免的。
Abstract:The system uses the single chip processor as a core to realize the auto controlling of the liquid drop speed, It uses the processor to control the circuit models, the key board circuit, LED display circuit, infrared detecting circuit, stepping engine drive circuit and liquid level alert circuit. In the system, single chip processor connects all circuit models. When the program starts, first to set the liquid dropping speed, then the processor read the setting data from its P2 port and display it on the LED. At the same time, the processor answers the interrupt to process the data from the infrared circuit and calculate the liquid drop speed, and compares the speed with the speed that is set up by the keyboard. Depend on the result of the comparison, the processor send out the control signal, which is to control the working status of the stepping engine. Through a fixed chain wheel, the engine is connected with the liquid injection bottle. The engine's left or right direction rotating can control the height of the bottle hence to realize the speed controlling function of the system. The infrared detecting circuit andthe single chip processor implement the infrared speed testing circuit together. Based on the working theory of the infrared sensor (infrared transmitter and receiver), to test out the number of drops in the defined time, which is set by the timer of the CPU, then the liquid drop speed can be obtained. The system also can realize the alarm function. When the height h1 is decreased to the alarming value (2-3cm), it gives the alarm signal. This function is also realized by the infrared sensor (infrared transmitter and receiver). When the processor detects the significant signal from the alarm detecting circuit, it acts the alarming circuit.参考文献:[1] 张迎新.单片微行计算机原理、应用及接口技术.国防工业出版社.2000.2[2] 孙涵芳,徐爱卿.MCS-51/96系列单片机原理及应用.北京航空航天大学出版社.1998.7[3] 康华光,陈大钦.电子技术基础.高等教育出版社.1998.8-。