基于Matlab的线性二次高斯控制教学——以旋翼飞行机器人的控制为例
使用MATLAB进行机器人运动规划和控制

使用MATLAB进行机器人运动规划和控制机器人技术的快速发展使得其在工业生产、服务业和医疗领域的应用越来越广泛。
而机器人的运动规划和控制是实现机器人动作精准、高效的关键技术之一。
而MATLAB作为一种功能强大的科学计算软件,其在机器人运动规划和控制方面的应用也越来越受到关注。
一、机器人运动规划机器人运动规划是指确定机器人在空间中如何从起始点移动到目标点的过程。
它包括路径规划和轨迹规划两个部分。
路径规划是确定机器人从起始点到目标点的最佳路径,常用的算法有A*算法、Dijkstra算法和RRT算法等。
这些算法通过考虑机器人在动作空间中的约束条件,寻找路径的优化解。
轨迹规划是在路径规划的基础上确定机器人沿路径的具体运动轨迹。
根据机器人运动的特性和任务要求,常用的轨迹规划算法有样条曲线插值法、贝塞尔曲线和LSPB曲线等。
在MATLAB中,可以利用Robotics System Toolbox实现机器人的路径规划和轨迹规划。
该工具箱提供了丰富的函数和工具,使得机器人路径规划和轨迹规划的实现变得简单而高效。
例如,我们可以首先定义机器人的运动属性和约束条件,然后使用路径规划算法在给定的环境中寻找最佳路径。
接着,利用轨迹规划算法得到机器人沿路径的具体轨迹,最后将轨迹转化为机器人可识别的运动指令,使机器人按照规划的路径运动。
二、机器人运动控制机器人运动控制是指将机器人按照规划的路径和轨迹进行精确控制的过程。
它包括动力学建模、控制算法设计和控制器实现等步骤。
动力学建模是指建立机器人运动学和动力学方程的过程。
通过对机器人的结构和运动进行建模,可以推导出描述机器人运动的数学方程,为后续的控制算法设计提供基础。
控制算法设计是根据机器人的动力学模型,设计合适的控制算法来实现对机器人运动的精确控制。
常用的控制算法有PID控制、模型预测控制(MPC)和自适应控制等。
这些算法可以根据机器人的运动误差和反馈信号进行自适应调整,实现对机器人运动的闭环控制。
终端约束 lqr问题matlab

终端约束 LQR 问题1. 简介1.1 任务背景终端约束 LQR 问题是一种优化控制问题,它结合了线性二次调节器(LQR)和终端约束。
LQR 是一种经典的控制器设计方法,通过最小化系统状态和控制输入的二次代价函数来实现系统的稳定性和优化性能。
终端约束则是在控制过程中对系统状态或控制输入施加额外的约束条件。
1.2 任务目标本任务的目标是在给定系统模型和性能指标的情况下,设计一个控制器,使得系统的性能指标达到最优,并满足终端约束条件。
2. LQR 控制器设计2.1 LQR 控制器原理LQR 控制器的设计基于线性二次调节器的思想,通过最小化系统状态和控制输入的二次代价函数来实现控制目标。
LQR 控制器的数学表达式如下:u(t)=−Kx(t)其中,u(t)是控制输入,x(t)是系统状态,K是状态反馈增益矩阵。
2.2 LQR 控制器设计步骤LQR 控制器的设计步骤如下:1.确定系统模型:首先需要确定系统的状态方程和输出方程,即确定系统的状态空间模型。
2.确定性能指标:根据控制目标和性能要求,选择合适的性能指标,例如系统的稳定性、响应速度、控制输入幅值等。
3.设计 LQR 控制器:根据系统模型和性能指标,使用最优控制理论中的方法,计算出状态反馈增益矩阵K。
4.实现控制器:将计算得到的状态反馈增益矩阵K应用到实际控制系统中,即将u(t)=−Kx(t)作为控制输入。
2.3 LQR 控制器的优点和局限性LQR 控制器具有以下优点:•简单易实现:LQR 控制器的设计方法简单直观,易于实现。
•优化性能:LQR 控制器通过最小化二次代价函数,可以实现系统的优化性能。
然而,LQR 控制器也存在一些局限性:•对模型误差敏感:LQR 控制器的设计基于系统模型,对模型误差较为敏感。
•需要系统可控性:LQR 控制器要求系统是可控的,即系统的状态可以通过控制输入完全控制。
3. 终端约束 LQR 问题3.1 终端约束的定义终端约束是指在控制过程中对系统状态或控制输入施加的额外约束条件。
《控制工程基础》题集

《控制工程基础》题集一、选择题(每题5分,共50分)1.在控制系统中,被控对象是指:A. 控制器B. 被控制的设备或过程C. 执行器D. 传感器2.下列哪一项不是开环控制系统的特点?A. 结构简单B. 成本低C. 精度低D. 抗干扰能力强3.PID控制器中的“I”代表:A. 比例B. 积分C. 微分D. 增益4.下列哪种控制系统属于线性定常系统?A. 系统参数随时间变化的系统B. 系统输出与输入成正比的系统C. 系统输出与输入的平方成正比的系统D. 系统参数随温度变化的系统5.在阶跃响应中,上升时间是指:A. 输出从0上升到稳态值的时间B. 输出从10%上升到90%稳态值所需的时间C. 输出从5%上升到95%稳态值所需的时间D. 输出达到稳态值的时间6.下列哪种方法常用于控制系统的稳定性分析?A. 时域分析法B. 频域分析法C. 代数法D. A和B都是7.在频率响应中,相位裕度是指:A. 系统增益裕度对应的相位角B. 系统相位角为-180°时的增益裕度C. 系统开环频率响应相角曲线穿越-180°线时的增益与实际增益之差D. 系统闭环频率响应相角曲线穿越-180°线时的增益8.下列哪种控制策略常用于高精度位置控制?A. PID控制B. 前馈控制C. 反馈控制D. 最优控制9.在控制系统的设计中,鲁棒性是指:A. 系统对参数变化的敏感性B. 系统对外部干扰的抵抗能力C. 系统的稳定性D. 系统的快速性10.下列哪项不是现代控制理论的特点?A. 基于状态空间描述B. 主要研究单变量系统C. 适用于非线性系统D. 适用于时变系统二、填空题(每题5分,共50分)1.控制系统的基本组成包括控制器、和。
2.在PID控制中,比例作用主要用于提高系统的______,积分作用主要用于消除系统的______,微分作用主要用于改善系统的______。
3.线性系统的传递函数一般形式为G(s) = ______ / ______。
轨迹跟踪控制算法 matlab
轨迹跟踪控制算法 matlab
轨迹跟踪控制算法是一种用于控制系统中跟踪特定轨迹或目标的算法。
在Matlab中,可以使用以下几种常见的轨迹跟踪控制算法:
1. PID控制器:PID控制器是一种经典的控制算法,通过比较实际输出与期望轨迹的偏差,计算输出控制信号。
可以使用Matlab中的pid函数来设计和调整PID控制器。
2. LQR控制器:线性二次调节(LQR)控制器是一种基于状态反馈的优化控制算法,通过最小化系统状态与期望轨迹之间的偏差来计算控制输入。
在Matlab中,可以使用lqr函数进行设计和调整LQR 控制器。
3. MPC控制器:模型预测控制(MPC)是一种基于系统模型的优化控制算法,它通过在每个采样时间步骤上优化一系列未来控制输入来实现轨迹跟踪。
在Matlab中,可以使用mpc函数来设计和调整MPC 控制器。
4. Sliding Mode控制器:滑模控制器是一种非线性控制算法,通过引入一个滑模面来强制系统状态跟踪期望轨迹。
在Matlab中,可以使用sim函数和滑模控制器的自定义函数来实现滑模控制。
以上是一些常见的轨迹跟踪控制算法,在Matlab中可以使用相应的函数和工具箱来实现和调整这些算法。
根据具体的系统和需求,选择合适的算法并进行参数调整以实现良好的轨迹跟踪效果。
如何在MATLAB中进行移动机器人控制
如何在MATLAB中进行移动机器人控制在现代机器人技术领域中,移动机器人控制是一个非常重要的研究方向。
移动机器人是指能够在环境中自主移动和执行任务的机器人。
而利用MATLAB软件进行移动机器人控制不仅可以帮助我们更好地理解机器人的运动规律,还可以实现对机器人的精确控制。
本文将从控制理论和MATLAB编程的角度,探讨如何在MATLAB中进行移动机器人控制。
## 一、移动机器人控制的基本理论在移动机器人控制中,我们需要考虑的一个重要问题是机器人的运动学和动力学。
机器人的运动学研究机器人在空间中的运动和姿态,而动力学则研究机器人的运动和力学关系。
了解机器人的运动学和动力学对于实现精确的控制至关重要。
在移动机器人控制中,我们通常会使用轨迹规划算法来生成机器人的运动轨迹。
轨迹规划算法可以根据机器人的起始位置、目标位置和环境约束,生成一条机器人运动轨迹。
常用的轨迹规划算法包括最速轨迹、最短路径和避障路径等。
另一个重要的控制理论是PID控制器。
PID控制器是一种经典的反馈控制器,可以根据机器人当前状态和目标状态之间的偏差来调整控制指令,从而实现对机器人的控制。
PID控制器在移动机器人控制中得到了广泛应用,因为它简单易懂、调节性能好。
## 二、MATLAB在移动机器人控制中的应用MATLAB是一种流行的数值计算和科学编程环境,被广泛应用于机器人控制领域。
MATLAB提供了很多工具箱和函数,可以用于在MATLAB环境中进行移动机器人控制。
首先,我们可以使用MATLAB中的机器人工具箱进行机器人模型的建立和仿真。
机器人工具箱提供了一系列函数和方法,可以帮助我们建立机器人模型,并对机器人进行仿真。
通过仿真实验,我们可以预测机器人的运动和行为,并进行控制算法的验证和优化。
其次,MATLAB中的机器人工具箱还提供了一些常用的轨迹规划算法,如最速轨迹和最短路径规划算法。
我们可以利用这些算法生成机器人的运动轨迹,并进行仿真和控制实验。
Matlab在飞行器设计与控制中的应用指南
Matlab在飞行器设计与控制中的应用指南飞行器设计与控制是航空领域中至关重要的技术领域之一。
实现一个高性能、稳定可靠的飞行器需要精确的设计和控制算法。
而Matlab作为一种强大的数值计算工具和开发环境,在飞行器设计与控制中发挥着至关重要的作用。
本文将重点介绍Matlab在飞行器设计与控制中的应用指南。
1. 飞行器建模与仿真飞行器的设计与控制首先需要建立准确的数学模型。
Matlab提供了丰富的工具箱和函数,可以方便地进行飞行器的建模和仿真。
首先,可以利用Matlab的Simulink工具进行连续系统和离散系统的建模。
通过建立准确的飞行动力学方程和传感器模型,并结合各种环境因素,如空气动力学和风扰动,可以得到真实可靠的仿真结果。
此外,Matlab还可以使用SimMechanics工具箱进行多体动力学建模,以更精确地描述飞行器的运动。
2. 飞行器姿态控制飞行器的姿态控制是保持飞行器稳定飞行的核心问题。
Matlab为飞行器姿态控制提供了丰富的控制设计和分析工具。
例如,可以使用Matlab内置的Control System Toolbox来设计和优化飞行器的控制器,并通过频域分析和根轨迹等工具评估系统的稳定性和性能。
此外,Matlab还提供了强大的优化工具,如优化和鲁棒控制工具箱,可以帮助用户通过自动化方法获得最优的控制器参数。
3. 导航与定位在飞行器设计与控制过程中,导航与定位是不可或缺的。
Matlab提供了一套完整的导航和定位算法工具箱,可以方便地进行导航滤波、轨迹规划、姿态解算等操作。
例如,可以使用自适应卡尔曼滤波算法对飞行器的姿态和位置进行准确估计。
此外,Matlab还提供了GPS和惯性导航系统的仿真工具,可以模拟不同环境下的导航和定位性能。
4. 通信与数据处理在现代飞行器中,通信与数据处理起着关键的作用。
Matlab提供了一系列用于通信系统设计和数据处理的工具箱,如通信工具箱、图像处理工具箱等。
基于MATLAB Simulink的二连杆机器人的PID控制与仿真
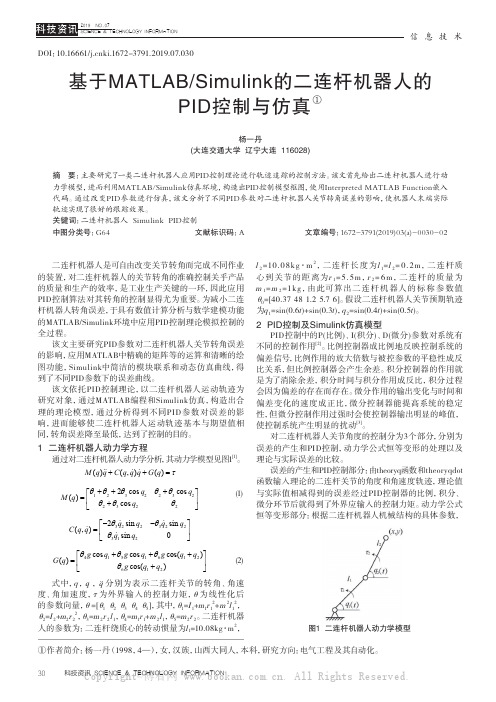
30科技资讯 SCIENCE & TECHNOLOGY INFORMATION信 息 技 术DOI:10.16661/ki.1672-3791.2019.07.030基于MATLAB/Simulink的二连杆机器人的PID控制与仿真①杨一丹(大连交通大学 辽宁大连 116028)摘 要:主要研究了一类二连杆机器人应用PID控制理论进行轨迹追踪的控制方法。
该文首先给出二连杆机器人进行动力学模型,进而利用MATLAB/Simulink仿真环境,构造出PID控制模型框图,使用Interpreted MATLAB Function嵌入代码。
通过改变PID参数进行仿真,该文分析了不同PID参数对二连杆机器人关节转角误差的影响,使机器人末端实际轨迹实现了很好的跟踪效果。
关键词:二连杆机器人 Simulink PID控制中图分类号:G64 文献标识码:A 文章编号:1672-3791(2019)03(a)-0030-02①作者简介:杨一丹(1998,4—),女,汉族,山西大同人,本科,研究方向:电气工程及其自动化。
二连杆机器人是可自由改变关节转角而完成不同作业的装置,对二连杆机器人的关节转角的准确控制关乎产品的质量和生产的效率,是工业生产关键的一环,因此应用PID控制算法对其转角的控制显得尤为重要。
为减小二连杆机器人转角误差,于具有数值计算分析与数学建模功能的MATLAB/Simulink环境中应用PID控制理论模拟控制的全过程。
该文主要研究PID参数对二连杆机器人关节转角误差的影响,应用MATLAB中精确的矩阵等的运算和清晰的绘图功能,Simulink中简洁的模块联系和动态仿真曲线,得到了不同PID参数下的误差曲线。
该文依托PID控制理论,以二连杆机器人运动轨迹为研究对象,通过MATLAB编程和Simulink仿真,构造出合理的理论模型,通过分析得到不同PID参数对误差的影响,进而能够使二连杆机器人运动轨迹基本与期望值相同,转角误差降至最低,达到了控制的目的。
基于matlab的四旋翼控制仿真与抗干扰验证
基于matlab的四旋翼控制仿真与抗干扰验证1. 引言1.1 背景介绍四旋翼飞行器是一种新兴的无人机飞行器,具有垂直起降和灵活性强的特点,在军事、民用和科研领域都有广泛应用。
随着科技的发展和社会的需求不断增加,四旋翼飞行器的控制系统设计和稳定性问题成为研究的热点之一。
在四旋翼飞行器的控制系统设计中,控制算法的选择和实现是至关重要的。
控制算法的设计直接影响到飞行器的稳定性和飞行性能,因此需要针对四旋翼飞行器的特点和需求来设计相应的控制算法。
通过基于Matlab的仿真分析,可以模拟四旋翼飞行器在不同环境和条件下的飞行情况,验证控制算法的有效性和稳定性。
抗干扰验证也是十分重要的,因为四旋翼飞行器在实际飞行中会受到各种干扰因素的影响,需要设计相应的控制策略来应对。
本文旨在通过基于Matlab的四旋翼控制仿真与抗干扰验证,研究四旋翼飞行器的控制系统设计和稳定性问题,为提高飞行器的飞行性能和稳定性提供理论支持和实验数据。
也希望为今后进一步研究和开发四旋翼飞行器提供参考和借鉴。
1.2 研究目的研究目的是通过基于Matlab的四旋翼控制仿真与抗干扰验证,探索四旋翼控制系统设计中的关键技术和方法,提高四旋翼系统的飞行稳定性和精度。
具体目的包括但不限于:深入研究四旋翼控制系统的设计原理和模型,探讨控制算法在四旋翼系统中的实际应用,分析控制系统对不同外部干扰的响应能力。
通过仿真验证和抗干扰实验,验证控制算法在不同环境条件下的有效性和稳定性,为四旋翼系统的工程应用提供理论支持和技术指导。
通过研究实践,深入理解四旋翼系统的控制原理,为进一步完善四旋翼系统的控制性能以及解决其在实际应用中面临的挑战提供参考和方向。
通过本研究,旨在为四旋翼控制技术的研究和应用提供新的思路和方法,推动四旋翼技术的发展和应用。
1.3 研究意义四旋翼无人机在军事、民用领域得到了广泛的应用,随着无人机技术的发展,其控制系统的设计和性能优化变得尤为关键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考虑 , 如何 帮 助学生 形象 地理 解并 掌握 L Q G控 制技术 是 教学 中的难点 . 本 文 以实 际科研 过 程 中的旋翼 飞行 机 器人 水平 面动 力学 模 型的速 度跟 踪稳 定控 制 为例 , 进行 控 制器 设 计, 由 于旋翼 飞 行机 器人 与 生俱 来 的动 力学 状 态耦 合 , 采用 L Q G控 制技 术 能够 综合 考 虑 系统状 态 间 的联 系.本 文将 基 于 M a t l a b控 制 系统 辅助 设计 软 件进 行 L Q G速度 跟踪 稳 定控 制 器 的设计 、仿 真 与分 析 ,并 对
1基 于 L QG 技 术 的 旋 翼 飞 行 机 器 人 的 姿 态 稳 定 控 制
1 . 1旋 翼 飞 行 机 器 人水 平 面 动 力 学模 型 描 述
当小型 旋翼 飞 行机 器人 工作 于悬停 或 低速 飞 行状 态 下 时 ,其动 力 学可 分 为耦 合 性 可 以忽 略 的两 个部 分: 一 是 作用 于 水 平 面 的动力 学 , 二是 作 用 于垂 直 面 的动 力学 , 其 中水 平 面 的动 力学 主要 由主旋 翼 产 生 的 横 向与 侧 向运动 构成 . 此时旋 翼 飞行 机器 人用 于控 制律 设 计 的水平 面 线性 化模 型 的状 态 空 间表示 形式 如 下
2 0 1 6年 1 2月
韶关 学 院学报 ・自然科 学
J o u r n a l o f S h a o g u a n U n i v e r s i t y ‘ Na t u r a l S c i e n c e
De C . 20l 6
第3 7卷
第 l 2期
Vo 1 . 3 7 No . 1 2
基 于 Ma t l a b的线性 二次 高斯控 制教 学
— —
以旋 翼 飞 行 机 器人 的控 制 为例
陈 阳, 吴春 富 , 马 桂 芳
( 龙 岩学 院 机 电工程 学 院 , 福 建 龙岩 3 6 4 0 0 0 )
摘 要 :以 基 于 线 性 二 次 高 斯 控 制 的 旋 翼 飞 行 机 器 人 的 速 度 跟 踪 稳 定 控 制 为 例 ,在 Ma t l a b软 件 中进 行 编 程 计 算 及仿真, 将抽 象的 线性二 次 高斯控 制 问题具 体化 , 并 就 代 价 函 数 参 数 矩 阵 的 选 择 对 系统 的 控 制 响 应 性 能 的 影
在现 代 控制 理论 课 程 中 , 线性 二 次 高斯 ( L Q G) 控 制 一般 安 排 在该 课 程 的最 后教 学 环 节 中 , 其涉 及 了该
课 程前 期 的系 统状 态空 间描述 、 能控制 、 能观 性 及稳 定 性 等理 论 , 通过 L Q G控 制技 术 的学 习能 够将 现 代控 制 理论 教 学 内容 有 机地 结 合起 来 …. 然 而实 际 教 学往 往 采用 公 式推 导 的 方式 开 展 理论 教 学 , 导 致 学 生 对 这
式所 示 :
x = A x + B u , 1
( 1 )
v = c . j ‘
[ 收 稿 日期 ] 2 0 1 6 — 0 7 — 0 6 [ 基金项 目 ] 福 建 省 中 青 年 教 师 教 育 科 研项 目( J A 1 5 4 9 2) ; 龙岩学院 2 0 1 4年 教 改 项 目 ( 2 0 1 4 J Y 3 8 ) . [ 作者简介 】 陈阳( 1 9 8 5 一 ) , 男 , 福建龙岩人 , 龙 岩 学 院 机 电 工 程 学 院讲 师 ; 研究方 向 : 飞 行 机 器 人 导航 制 导 与 控 制
一
现代 控制 技 术理 解不 够 深入 . 特别 是 L Q G控制 技术 中涉及 的状 态空 间方 法有 着 实际 工程 背景 , 其状 态转
移 矩阵 描述 了被 控对 象 的 内在 联 系.在一些 复 杂系 统 的控制 中 , L Q G控制 技术 设计 的控制 器 能够 考 虑到 系
统 状态 之 间 的耦合 关 系 , 因此 其在 雷 达天 线 的旋 转跟 踪 控制 E 2 3 , 船 舶 的运 动控 制 [ 3 3 , 飞 行器 的 飞行 控制 H , 汽 车 悬架 控制 等领 域都 得到 应用 . 基于 L Q G控制 技术 是一 项 与实 际工 程 的模 型 系统 密切 相关 的理 论 技术 的
L Q G设 计 过 程 中涉 及 到 的 两 个 关 键 权 值 矩 阵 对 系 统 响 应 性 能 的影 响 进 行 分 析 ,整 个 系 统 在 Ma t l a b的 S i m u l i n k环境 中进 行仿 真 , 形象 直观 , 利 于学 生掌 握线 性二 次高 斯控 制理 论 的各个 环节 .
第l 2 期
陈阳, 等: 基于 M a t l a b的线性二次高斯控制教学
. 7 9.
其 中, 系统状 态 向量 = [ u
q P a s பைடு நூலகம் ] , 与 分别 为 前 向及侧 向线速 度 、 与 分别 为俯 角 及 滚转
角、 q与 P分 别 为俯仰 角 速 率及 滚 转角 速 率 、 与 b 为 带 有伺 服小 翼 的旋 翼 挥 舞运 动 在俯 仰 及滚 转 通 道 的 描述. 系统 控制 向量 = A ] , , 及 。 分 别 为俯 仰及 偏航 通 道 的控制 量 . 状态 转移 矩 阵 A、 控制 矩 阵 及