B7L_培训手册_驾驶辅助
驾驶辅助系统教学设计案例

驾驶辅助系统教学设计案例一、引言随着科技的不断进步,车辆的智能化程度也越来越高。
驾驶辅助系统作为一种重要的技术支持,可以提高驾驶的安全性和舒适度。
因此,教育和培训驾驶员如何合理使用驾驶辅助系统,已经成为现代驾驶培训的一个重要内容。
本文通过设计一套驾驶辅助系统教学方案,旨在帮助驾驶员充分了解和掌握驾驶辅助系统的功能、使用方法以及注意事项等内容,从而提高驾驶员的专业水平和驾驶技能。
二、教学目标1. 了解不同类型的驾驶辅助系统,包括但不限于车道保持辅助、自适应巡航控制、前向碰撞预警等。
2. 掌握驾驶辅助系统的使用方法,包括系统的启动与关闭、调节参数等。
3. 理解驾驶辅助系统的原理和工作机制。
4. 学会分析驾驶场景,判断何时使用适当的驾驶辅助系统。
5. 理解驾驶辅助系统的局限性和注意事项,以及在紧急情况下的操作应对。
1. 驾驶辅助系统的介绍1.1 驾驶辅助系统的定义和分类1.2 驾驶辅助系统的发展历程2. 各类驾驶辅助系统的功能和原理2.1 车道保持辅助系统2.2 自适应巡航控制系统2.3 前向碰撞预警系统3. 驾驶辅助系统的使用方法与注意事项3.1 启动与关闭驾驶辅助系统的步骤3.2 如何调节驾驶辅助系统的参数3.3 驾驶场景分析与驾驶辅助系统的匹配3.4 驾驶辅助系统的局限性和注意事项4. 紧急情况下的操作应对与自我保护意识培养 4.1 驾驶辅助系统与紧急情况的关系4.2 紧急情况下的操作应对技巧4.3 培养良好的自我保护意识1. 授课讲解:通过教师详细介绍驾驶辅助系统的功能、原理和使用方法,引导学生全面了解。
2. 实操演示:教师现场演示驾驶辅助系统的操作流程和注意事项,让学生亲自操作并模拟驾驶场景。
3. 团队合作:安排学生分组,进行驾驶辅助系统案例分析与讨论,提高学生分析问题和解决问题的能力。
4. 案例研讨:教师组织选取一些真实的驾驶辅助系统案例进行深入研讨,让学生在实际问题中应用所学知识。
五、教学评估1. 知识考核:通过书面测试或在线问答等形式,测试学生对驾驶辅助系统知识的掌握情况。
民用无人机驾驶员训练手册(2020)

民用无人机驾驶员训练手册批准人:** 编制时间:年月日编制:**************有限公司目录1 总经理声明22 修订记录33 分发清单44 公司简介55 管理手册56 组织机构57 进入条件78 训练规范89 考试161总经理声明作为***有限公司的总经理,我在此郑重声明:(1)本手册完全按照《一般运行和飞行规则》(CCAR-91R2)、《民用航空器驾驶员合格审定规则》(CCAR-61R5)、《民用无人机驾驶员管理规定(AC-61-FS-2018-20R2)》、《轻小无人机运行规定(试行)(AC-91-FS-2015-31)》、《民用无人驾驶航空器系统空中交通管理办法》(MD-TM-2016-004)、《民用无人驾驶航空器实名制登记管理规定》(AP-45-AA-2017-03)及《民用无人驾驶航空器经营性飞行活动管理办法(暂行)》(MD-TR-2018-01)、《民用无人机驾驶员训练机构合格审定规则》(ZD-BGS-004-R4)的相关内容进行编写,其内容覆盖了民航规章对民用无人驾驶航空器系统驾驶员训练机构的管理要求。
当中国民用航空局及中国航空器拥有者及驾驶员协会(简称“中国AOPA”)对其颁布的法规及管理规定有任何更新或修订时,机构管理手册将进行及时的修订,以保证其与法规及管理规定的符合性。
(2) 本手册阐明了本公司的组织机构、职责、管理系统及其要素。
本手册连同附录中所列出的管理程序构成了公司的质量管理体系文件,公司内部各有关部门及员工必须遵照执行。
(3) 我和我的团队在工作中将严格执行本手册的规定,同时接受民航局及中国AOPA 的监督和检查。
本人承诺将认真执行大纲内容,科学安排,循序渐进,严格标准,确保训练安全和质量。
总经理签字:**日期:年月日2修订记录3分发清单改版号:分发日期:4公司简介等荣誉荣。
****,交通便利,环境幽雅,学习氛围浓郁,教学设施齐全,配备有数百台先进的网络计算机的实验室、大屏幕投影室、计算机职业技能实验室、装修一新的现代化大型学术交流报告厅、计算机维修实验室等。
汽车安全驾驶辅助系统的功能和使用方法

汽车安全驾驶辅助系统的功能和使用方法随着科技的不断进步,汽车安全驾驶辅助系统在现代汽车中扮演着越来越重要的角色。
这些系统通过使用先进的传感器和计算机技术,为驾驶员提供更高的安全性和便利性。
本文将介绍几种常见的汽车安全驾驶辅助系统,并探讨它们的功能和使用方法。
一、自动紧急制动系统(AEB)自动紧急制动系统(AEB)是一种能够自动检测车辆前方障碍物并在必要时自动刹车的技术。
当系统的传感器检测到前方有碰撞的风险时,它会向驾驶员发出警告,并预先准备好刹车系统以获得更快的反应速度。
如果驾驶员未能做出及时反应,AEB将自动刹车以减轻事故的严重程度或避免碰撞。
使用AEB系统时,驾驶员只需要专注于道路的行驶情况,而不必担心前方突发状况。
这个系统可以极大地提高行车安全性,并减少意外事故的发生。
二、主动巡航控制系统(ACC)主动巡航控制系统(ACC)是一种可以自动控制车辆速度和与前车之间的距离的系统。
ACC使用车辆前部的雷达或摄像头来监测前方车辆,并根据其行驶速度和距离加以调整。
驾驶员可以事先设定一个安全跟车距离,ACC系统会自动调整车速以保持在这个距离范围内。
如果前方车辆减速或停车,ACC系统将自动将车辆减速或停车。
对于长时间高速行驶或交通堵塞情况下,ACC系统可以大大减轻驾驶员的疲劳程度。
驾驶员只需专注于保持车辆在车道内行驶,而不必频繁地踩刹车和加速。
三、盲点监测系统(BSD)盲点监测系统(BSD)是一种能够帮助驾驶员检测车辆侧后方盲点的系统。
通过使用车辆两侧的传感器,BSD系统可以监测车辆周围的盲点区域。
当其他车辆进入盲点区域时,系统会发出警报,提醒驾驶员注意。
使用BSD系统时,驾驶员可以更加安全地变换车道或进行超车。
它能够减少因盲点导致的事故,并提供更合理的行驶决策。
四、倒车影像辅助系统(RVS)倒车影像辅助系统(RVS)以摄像头为基础,提供了一个在倒车时观察车辆周围环境的视图。
当驾驶员将档位换入倒车档时,后视摄像头会实时显示车辆后方的影像,帮助驾驶员检测和避免无形中的障碍物。
TPI-B7L驻车辅助系统常见故障及排除
D:同理,当驻车辅助开关、驻车辅助控制单元及蜂鸣器出现故障时,如: 驻车辅助开关损坏; 驻车辅助开关 E266 断路/对地短路; 驻车辅助控制单元 J446 损坏; 驻车辅助报警蜂鸣器 H15 断路/对地短路; 驻车辅助报警蜂鸣器 H15 损坏; 均会引起驻车辅助系统无法报警,无声音输出。 4、 倒车时驻车辅助报警蜂鸣器 H15 音量太小 诊断过程: A:连接 VAS505X 检查驻车辅助控制单元故障代码:无故障代码; B:更换后部报警蜂鸣器,现象依旧。 C:根据电路图,检查整个线路正常。 D:连接 VAS505X 匹配后部驻车辅助蜂鸣器 H15 音量;
技术信息
电器系统
B7L B7L 驻车辅助系统常见故障及排除 分布范围
B7L 车型
信息来源
现场反馈
技术说明
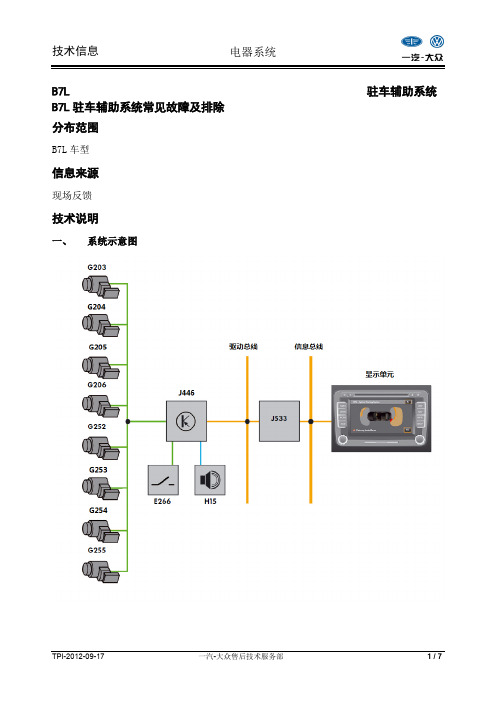
一、 系统示意图
驻车辅助系统
TPI-2012-09-17
一汽-大众售后技术服务部
1/7
技术信息
电器系统
二、 功能描述 自检:当打开点火开关时车辆开始进入自检,几秒钟后自检结束。 开启及关闭:打开点火开关,按下驻车辅助按键 E266 或者挂入倒档,开启驻车辅助系统。 再次按下驻车辅助按键 E266(按键指示灯熄灭)或向前行驶速度超过 15Km/h,驻车辅助系 统关闭。 如果驻车辅助系统就绪,则会发出短促信号音,且功能指示灯亮起,如果识别到系统故障, 则会响起 5 秒钟的报警音,同时驻车辅助功能指示灯闪烁。 在距离测量过程中,声音脉冲时间间隔按比例随距离的缩小而缩短。当距离小于 30CM 时, 声音脉冲变为持续音。 特殊情况:沿着墙壁行驶无报警。 三、 常见故障 1、 前保险杠线束搭铁导致驻车辅助故障长鸣, 驻车辅助指示灯闪亮。 诊断过程: A:连接 VAS5052,检查故障代码:
驾驶辅助设备说明书

1.Proper installation combined with operator training in the use, care, and maintenance of vehicle camera systemsIntroduction:ECCO’s Reversing Camera System is designed to provide visual cues to help drivers avoid collisions when backing up. A driver using a properly installed and maintained rear view system can be alerted to potential safety hazards and thus take the appropriate action to prevent an accident. This manual provides information about installation, function, safety, maintenance, replacement parts, and warranty.Installation InstructionsReversing Camera/Monitor SystemWiring:CAMERA EC2015-C-Flush Mount ImageColor CMOS NTSC: 580*540PAL: 580*492Voltage Requirement 12V +/-1V Power Consumption < 1w Lens N/A Lens Angle 120°Audio No audio function Light Sensor CMOS Infrared LEDs10Pigtail Connection: CAM Female 4 Pin Threaded Housing Aluminum alloy Mech. Vibration 10 g Mounting Flush mount Weight0.74 lbs (0.3kg)Dimensions (WxHxD) 1.69 x 1.24 x 1.10 in 43 x 31.5 x 28 mm Operating Temp.-22°F to 158°F IP Rating IP67ApprovalsCE, FCC, RoHS Current Consumption0.43AMONITOR EC4204-M - 4.3” RV Mirror Image 4.3” LCD Color, 4:3Controller Internal/2 camera Voltage12-24V Power Consumption 3WMirror Imaging Yes (via menu of mirror)Split Screen Feature No AV Compatible No AudioNo Contrast/Brightness Yes Light Sensor N/ACamera Selection 1-2 Trigger Wires Connection: CAM Female 4 Pin Threaded Connection (Mirror Pigtail)Male 8 PinConnection: CB N/A Housing PlasticMounting Pedestal Bracket Mech. Vibration 2.84 g Weight1.1 lbsDimensions (WxHxD)11.04 x 1.20 x 3.60 in280.33 x 30.5 x 91.52 mm Operating Temp -4°F to 158°F Remote Control YesApprovalsCE, FCC, RoHSMonitorFuse+VDC -GNDBlue Wire (left turn lights)Brown Wire (reversing lights)Camera 2(reversing)Camera 1(left turn)Accessories:1.AV and power supply cable.2.Center mount bracket.Basic Operation:Connection DiagramBlack 4 pin male for Camera 1/ Camera 2.SIngle red wire to positive power supply of DC/12-32V.Single black wire to GND.Single brown wire to positive power wire of back-up light.Single blue wire to positive power wire of left light.Reversing Display:1.When the blue wire isconnected to the positive wire of the left turn light, the monitor will automatically switch toCAM 1 (left side camera) when the left turn indicator is activated.2.When the brown wire is connected to the positive wire of the back-up light, the monitor will automatically switch toCAM 2 (back-up camera). The distancing grid will also be displayed.•When auto dim is turned on in dark environment, OSD turns into dim mode for dim setting. When auto dim is turned on / off inbright environment, OSD displays normal mode.•Press M to select SCALE ADJUST•When the brown wire is connected to the positive wire of back-up light, the distancing grid will be displayed2.Option: LANG, SCALE, BLUE BACK, COLOR SYS options will display on the screen as illustrated below.Dim Mode Normal ModePress to select OFF or for scale adjustment.If is selected, press to adjust the scale up/down.•Press M to select LANG•Press M to select COLOR-SYSto select AUTO/PAL/NTSCMenu:Press MENU to display the following options and settings:1.Picture 2.Option1.Picture: BRIGHT, CONTRAST, COLOR, AUTO DIM and SCALE ADJUST options will display on the screen as illustrated below:•Press M to select BRIGHTTroubleshooting:The symptoms described below do not necessarily mean a failure within the display. Please check the following items before you initiate request for repair.SymptomsPossible Causes/SolutionsNo picture, no soundImproper connection of automobile adapter. Use of un-authorized power supply. Power switch is on OFF position.No picture Check whether AV cable is properly connectedDark picture Check whether brightness and contrast are adjusted correctly; Check whether the environments temperature is too low.No colorAdjust the color settings.No reversing function (i.e.Picture)The black wire of the monitor AV cable to the reversing light may be loose. The red wire from the monitor may be loose.This device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions:(1) This device may not cause harmful interference.(2) This device must accept any interference received, including interference that may cause undesired operation.Declaration of conformity:Barriers PhenomenaReasonWays to SolveImage Shaking Fix-up Bracket ReleaseAdjust and Stabilize No Image Poor connection or system connect cables are brokenCHeck the connection of the monitor to the camera Image Blurring Camera lens are dirtyClean the camera lens Image SlantingCameras not installed in the right wayAdjust the bracket of cameras。
BMW 7 系 学习手册
学员工作手册BMW 7 系2005 年 9 月的措施BMW 售后服务售后服务培训本工作手册中所包含的信息仅适用于 BMW 售后服务培训班的学员。
有关技术数据方面的更改 /补充情况请参见 BMW 售后服务的相关最新信息。
信息状态:2005 年 6 月conceptinfo@bmw.de©2005 BMW 集团慕尼黑,德国。
未经 BMW 集团(慕尼黑的书面许可不得翻印本手册的任何部分。
VS-12 售后服务培训学员工作手册BMW 7 系2005 年 9 月的措施有关本工作手册的说明所用符号为了便于理解内容并突出重要信息,在本工作手册中使用了下列符号:所包含的信息有助于更好地理解所述系统及其功能。
ƒ表示某项说明内容结束。
当前状况:由于 BMW 对车辆结构和装备不断进行后续研发,因此本工作手册中的内容与培训所用车辆情况可能会不一致。
本手册发行时仅针对左侧驾驶型车辆。
右侧驾驶型车辆部分操作元件的布置位置与本参加者手册的图示情况不同。
其它信息来源有关各主题的其它信息请参见:-产品信息-用户手册-BMW 诊断系统-维修车间系统文件-SBT BMW 售后服务技术。
目录BMW 7 系2005 年 9 月的措施培训 1 总线概览 1导航系统 4电话系统:远程通信系统控制单元 5远程通信服务 131学员工作手册BMW 7 系2005 年 9 月的措施总线概览总线概览中的更改IBOC数字调谐器引入美规车辆后需要将 IBOC 控制单元连入 MOST 总线。
NV晚些时候引入 BMW 夜视系统。
FLA引入远光灯辅助系统后需要增加 FLA 控制单元。
TCU自 2005 年 9 月起, 只能为 BMW 7 系提供选装配置SA 633“ Business 移动电话适配装置”和SA 664“移动电话适配装置”。
这两种电话选装配置都基于远程通信系统控制单元(TCU ,因此 TCU 控制单元取代了以前总线概览中包括的 TEL 控制单元。
汽车行业智能驾驶辅助技术手册

汽车行业智能驾驶辅助技术手册智能驾驶辅助技术手册引言智能驾驶辅助技术是当今汽车行业的热门话题,它们的出现旨在提高驾驶安全性、舒适性和便利性。
本手册将为您详细介绍汽车行业的智能驾驶辅助技术,包括不同类型的辅助系统、其工作原理以及如何正确操作这些系统。
通过阅读本手册,您将了解到如何更好地驾驶汽车,并享受智能驾驶技术带来的便利。
第一章减速技术在汽车行驶中,减速技术是一个至关重要的方面。
智能驾驶辅助技术通过使用传感器和摄像头等设备来监测车辆周围的情况,并实时调整车速以确保安全。
其中,自适应巡航控制(ACC)是一种常见的辅助系统,它能根据周围车辆的速度和距离自动调整车速,以保持与前车的安全距离。
第二章转向技术转向技术是智能驾驶辅助技术中的另一个关键要素。
对于城市驾驶或高速公路驾驶来说,自动转向辅助系统具有重要意义。
该系统通过感知车道线和周围环境,实现自动转向并保持车辆在车道内行驶。
这项技术旨在消除驾驶员的误操作和疲劳,并提高驾驶的舒适性和安全性。
第三章刹车技术刹车技术是确保车辆安全行驶的关键因素。
智能驾驶辅助技术通过紧急刹车辅助系统(EBA)和停车辅助系统来提供刹车支持。
紧急刹车辅助系统能在紧急情况下自动刹车,以避免碰撞。
而停车辅助系统则能帮助驾驶员在狭小的空间中轻松停车,减少人为刹车误差,提高安全性。
第四章盲点监测技术在驾驶过程中,盲点是一个常见的安全隐患。
盲点监测技术的出现有效解决了这个问题。
该技术通过安装摄像头或传感器来监测车辆周围的盲点,并在有车辆进入盲点时发出警报。
这个系统为驾驶员提供了更好的可视性和警示,帮助他们更好地掌握周围的交通状况,减少事故的发生。
结论本手册详细介绍了汽车行业中智能驾驶辅助技术的各个方面。
从减速技术到转向技术,再到刹车技术和盲点监测技术,这些智能辅助系统为驾驶员提供了更高的行车安全性、舒适性和便利性。
作为驾驶员,正确操作这些系统对于提高驾驶体验和保证行车安全至关重要。
我们鼓励驾驶员在使用智能驾驶辅助技术时遵循相关操作手册并注意使用环境,以确保乘车的安全与舒适。
驾驶辅助等级定义
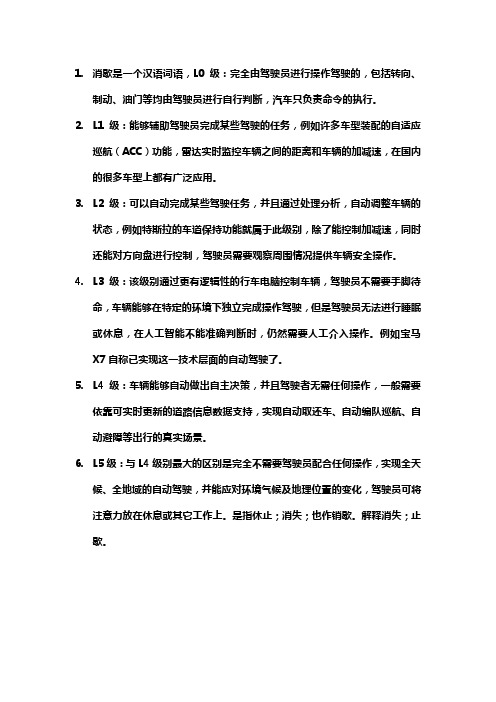
1.消歇是一个汉语词语,L0级:完全由驾驶员进行操作驾驶的,包括转向、
制动、油门等均由驾驶员进行自行判断,汽车只负责命令的执行。
2.L1级:能够辅助驾驶员完成某些驾驶的任务,例如许多车型装配的自适应
巡航(ACC)功能,雷达实时监控车辆之间的距离和车辆的加减速,在国内的很多车型上都有广泛应用。
3.L2级:可以自动完成某些驾驶任务,并且通过处理分析,自动调整车辆的
状态,例如特斯拉的车道保持功能就属于此级别,除了能控制加减速,同时还能对方向盘进行控制,驾驶员需要观察周围情况提供车辆安全操作。
4.L3级:该级别通过更有逻辑性的行车电脑控制车辆,驾驶员不需要手脚待
命,车辆能够在特定的环境下独立完成操作驾驶,但是驾驶员无法进行睡眠或休息,在人工智能不能准确判断时,仍然需要人工介入操作。
例如宝马X7自称已实现这一技术层面的自动驾驶了。
5.L4级:车辆能够自动做出自主决策,并且驾驶者无需任何操作,一般需要
依靠可实时更新的道路信息数据支持,实现自动取还车、自动编队巡航、自动避障等出行的真实场景。
6.L5级:与L4级别最大的区别是完全不需要驾驶员配合任何操作,实现全天
候、全地域的自动驾驶,并能应对环境气候及地理位置的变化,驾驶员可将注意力放在休息或其它工作上。
是指休止;消失;也作销歇。
解释消失;止歇。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VAS6350/1 左右桨状件
VAS6350/2 倒车摄像校准红外线激光测距器
一 汽 - 大 众 FAW-VOLKSWAGEN
24
VAS6350校准板上每一个校准标记点(标记点包括:黑色边框和黑色圆点标识点)的 位置和排列(也就是坐标值)都被存储在控制单元内部。控制单元实际的校正过程就 是将图像区域通过电子失真校正,校正到控制单元内部存储的标准位置,如果图像位 置不能和控制单元内部存储值相匹配,或者图像不能正确识别,那么校正过程就被取 消并记录故障信息, 出错的原因可能有以下几种: 1、 VAS 6350校正版摆放不正确 2、测量距离值输入错误 3、周围环境光强过大,反射到校正版上,影响了图像识别。 注意:由于光反射的影响不能从外部以任何程度来衡量,因此在校准之前应该先通过 导航显示屏幕检查光反射的影响
一 汽 - 大 众 FAW-VOLKSWAGEN
25
RGB-红绿蓝,视频信号,传递图像信息 同步捕捉-视频捕捉同步线, 共需要4根线(RGB 3根 + 同步线) J519接收到倒档信号后,通过CAN总线通知导航接收视频信号 低端摄像头不需要在车间进行校准
25
驾驶辅助系统 主动巡航控制 (ACC)
一 汽 - 大 众 FAW-VOLKSWAGEN
14
驾驶辅助系统 倒车影像系统 RVC
一 汽 - 大 众 FAW-VOLKSWAGEN
15
众所周知,倒车影像系统的功能是在驾驶员倒车时,通过摄像头将车辆后部的影 像显示给驾驶员,便于驾驶者进行车辆控制。我们还是通过一段动画来说明一下 系统的功能。 这个系统的优势在于: 1、增加舒适性 2、动态指导线能够估计距离 3、提高停车时的准确性 4、增加了直接可视区域
26
在有些车型上,也称为:自动距离控制系统系统ADC。 自动接近控制APC 在大众公司的车型上,ADC是ACC的早期版本,在前方有慢车时,会自动减速, 但是当前方慢车离开后,不会自动加速。而ACC则可以。下面首先让我们观看一 段视频,来大致了解一下ACC的功能。
26
主动巡航 ACC ACC基本功能 监测中… 发现车辆 调整车速
经过控制器加工后的图像
一 汽 - 大 众 FAW-VOLKSWAGEN
22
因为广角摄像头提供的图像时变形的,来自广角摄像头的图像,通过电子校正, 显示出来的就是和车后景物一样的真实图像。换句话说,来自摄像头的图像是通 过控制单元修正。
22
倒车影像RVC 倒车影像控制器
控制器功能 向倒车摄像头提供电源 校准照相机的广角图片 插入动态和静态的辅助图线 调节相机信号至视频入口 自诊断 诊断相机信号 通过测试仪和校准板对系统校准
大约 15 cm
与街沿平行
与街沿对齐 未识别到街沿
以街沿为基准定位
9m
与前方汽车对齐
以行车轨迹为基准定位
一 汽 - 大 众 FAW-VOLKSWAGEN 13
图1:识别到街沿,而前车离街沿较近,小于15cm,则车辆与街沿对齐,并保持大约15cm 图2:识别到街沿,则与街沿为基准,平行于街沿 图3:未识别到街沿,则与前车外角对齐 图4:未识别到街沿,如果车辆以一定弧线驶进停车空位,(从提示挂入倒档回退大约9m左右为弧 线),则车辆以行车轨迹作为基准对齐,这样车辆可能看起来停不正。
一 汽 - 大 众 FAW-VOLKSWAGEN
23
第一阶段:倒车影像控制单元J772接收来自摄像头的图像并进行适当处理。这是 必须的。换句话说,来自摄像头的图像是通过控制单元修正。 第二阶段:图像上加上动态和静态指导线。 为了保证修正是合适的并且指导线有较高的正确率,摄像头必须被校准
23
倒车影像RVC 专用工具
一 汽 - 大 众 FAW-VOLKSWAGEN 6
6
停车辅助转向 PLA 阶段一:激活 PLA
一 汽 - 大 众 FAW-VOLKSWAGEN
7
打开点火开关后,车速必须至少超过 10 km/h;低于45:被动模式可以激活系 统,但不进行动作;低于30:主动模式,激活系统,进行相关泊车转向辅助动作。
一 汽 - 大 众 FAW-VOLKSWAGEN
3
3
驾驶辅助系统 停车辅助转向系统 PLA
一 汽 - 大 众 FAW-VOLKSWAGEN
4
在日益繁忙的交通条件下,辅助系统接管驾驶者对车辆的部分控制功能,帮助驾 驶者更好的实现车辆的控制。
4
停车辅助转向 PLA 停车辅助转向系统 PLA 1.0 只支持将车辆泊入平行停车位
最小的停车位长度:车辆长度+1.4m
一 汽 - 大 众 FAW-VOLKSWAGEN 5
5
停车辅助转向 PLA 泊车过程
使用泊车辅助倒入停车空位的过程被分为下列四个阶段: 阶段 1 :激活泊车转向辅助系统(PA)
每次开始停车前,都必须重新激活泊车转向辅助系统 只有当车速低于30 km/h 时,泊车转向辅助系统才能激活
系统关闭
15#线关
挂入倒挡, 或选择“R”挡
一 汽 - 大 众 FAW-VOLKSWAGEN
20
车速低于15km/h,但是大于10KM/H,在挂入倒挡或选择“R”挡,屏幕将变暗;在 车速低于10km/h时,图像重新显示 摄像头的工作与行李箱盖是否关闭无关(现有PVS车状态、商品车状态待确认)
20
倒车影像RVC 摄像头
10
请您根据平时驾车的情况,分组讨论每部操作时应该注意的事项。并记录下来,便于 在试驾体验时进行验证。
10
停车辅助转向 PLA 系统中断条件
满足下列条件之一,泊车辅助将被关闭: • 在向后倒停车时,驾驶员将车速提高到 7 km/h 以上 • 停车过程未在挂入倒车挡后的180 秒内完成 • 在转向过程中,驾驶员作用在方向盘上的转向力矩大于5 Nm • 在停车过程中,倒车挡被挂出 • 在停车过程中,ESP被关闭 • 在停车过程中,ESP介入 • 在停车过程中,按下了驻车转向辅助系统按键E581 ,关闭了 驻车转向辅助系统 重要提示: 当停车过程被中断时,蜂鸣器响起、驾驶员信息系统中显示相 应的信息、按键 E581 内的指示灯熄灭
B7L _ 新车型技术培训
大众品牌 技术服务 培训
1
B7L_技术培训
驾驶员辅助系统
一 汽 - 大 众 FAW-VOLKSWAGEN
2
2
概述 驾驶员辅助系统
停车辅助转向系统 PLA 1.0 带OPS显示功能的停车距离控制 PDC 倒车影像 RVC 主动巡航控制 ACC (旗舰版车型、2011年11月) 预碰撞安全系统 FRONT ASSIST(旗舰版车型、2011年11月) 疲劳监控系统(MKE)(2012年型、2012年2月) 车道保持系统(2012年型、2012年2月) 车辆换道辅助系统
16
16
ቤተ መጻሕፍቲ ባይዱ
倒车影像RVC 停车模式1
橙色线为动态辅助线,依赖于方向盘角度调节; 动态辅助线上的标记间隔1米; 蓝色的区域是静态的辅助区域,显示车后5米的轮廓; 在不同的蓝色辅助区域里第一个通道在车后1米,第二个通道2米,蓝色区域在 车尾部总计5米; 红色线在车尾部40Cm。
一 汽 - 大 众 FAW-VOLKSWAGEN 17
屏蔽线 信息处理器 视频线
广角镜头 水平方向130 °;垂直方向100° 重约40g 尺寸: 27mm×24.5mm×35mm
电源+ 电源透镜
分辨率:250K像素 安装位置:可翻转VW标内部
一 汽 - 大 众 FAW-VOLKSWAGEN
21
21
倒车影像RVC 图像修正
没有经过控制器加工的图像
18
倒车影像RVC 操作与显示
显示屏上的软触键
返回 垂直停车模式 平行停车模式 明亮度/对比度/颜色调节 显示只有OPS模式
绿色指示线:静态指示线 黄色指示线:动态指示线
一 汽 - 大 众 FAW-VOLKSWAGEN
19
指示线的作用是什么?(提问)
19
倒车影像RVC 操作
系统激活条件
15#线接通 脱离倒挡,或 选择“R”挡超过 10s 显示屏关闭 车速在15km/h以内 车速限制
讨论:在停车模式1的状态下,如何通过观察指示线和指示区来完成车 辆倒入车位。 分为几个步骤。时间:15分钟。
17
倒车影像RVC 停车模式2
倒车影像始终激活第一种模式,第二种停车模式只能通过菜单选择。 无论哪种选择,必须先拨动转向灯。
一 汽 - 大 众 FAW-VOLKSWAGEN 18
讨论:在停车模式2的状态下,如何通过观察指示线和指示区来完成 车辆倒入车位。 分为几个步骤。时间:15分钟。
一 汽 - 大 众 FAW-VOLKSWAGEN 12
请您总结一下该系统还有哪些系统局限性。时间:20分钟;方式:分组讨论、贴 条、 总结:系统只是在一定方位内,一定程度上对驾驶操作起到辅助作用,驾驶者是 车辆的实际控制人,必须对安全责任负责。
12
停车辅助转向 PLA PLA 系统泊车状态分析
识别到街沿
一 汽 - 大 众 FAW-VOLKSWAGEN 11
离合器踩到底,泊车系统的状态:不影响 制动踏板踩到底,不激活ESP,泊车系统的状态:不影响
11
停车辅助转向 PLA 系统局限性分析
泊车辅助系统无法替代驾驶员对周围环境的判断。驾驶员为其车辆负全部 法律责任。驾驶员发现有可能造成其它车辆或物品损坏时必须做出相应反 应,必要时停住车辆并结束这项功能。
阶段 2 :寻找合适的停车空位
泊车转向辅助系统寻找道路左右两侧的空车位 驾驶员信息系统显示已经找到了一个足够大的空车位
阶段 3 :借助泊车转向辅助系统(PA)泊车
汽车停止时挂上倒车挡后,开始停车过程 PA 把汽车转向空车位,驾驶员必须负责制动和踩油门