基于峰值电流控制的BuckBoost型LED驱动器设计
buckboost课程设计

buckboost课程设计
汇报人:
目录
01 02 03 04 05
buckboost基本原理
buckboost控制器设计
buckboost驱动电路设计
buckboost应用实例
buckboost课程设计总结与展 望
01
buckboost基本原理
工作原理
输入电压:直流 电压
输出电压:直流 电压
02
buckboost控制器设计
控制器选择
控制器类型:PID 控制器、模糊控 制器、神经网络 控制器等
控制器参数:增 益、积分时间、 微分时间等
控制器性能:稳 定性、快速性、 准确性等
控制器应用:工 业控制、机器人 控制、汽车电子 等
控制器参数设置
开关频率:确定控制器的开 关频率,影响效率和噪声
工作过程:通过 开关元件控制电 流流向,实现电 压的升降
应用领域:电源 管理、电机控制、 LED照明等
电路组成
输入电压源:提供稳定的直流电压
输出电压源:输出稳定的直流电压
开关元件:控制电路的通断,实现电 压的升降
控制电路:控制开关元件的通断,实 现电ห้องสมุดไป่ตู้的升降
电感元件:储存和释放能量,实现电压 的升降
电力电子领域:用于直流电 源的稳压和隔离
通信领域:用于通信设备的 电源管理
工业自动化领域:用于工业 自动化设备的电源管理
应用电路设计
输入电压:12V
输出电压:5V
开关频率: 50kHz
控制方式: PWM控制
电路组成:开关 管、电感、电容、
二极管、电阻
应用领域:电源 管理、电机控制、
LED照明等
基于BUCK变换器的LED恒流电源的设计
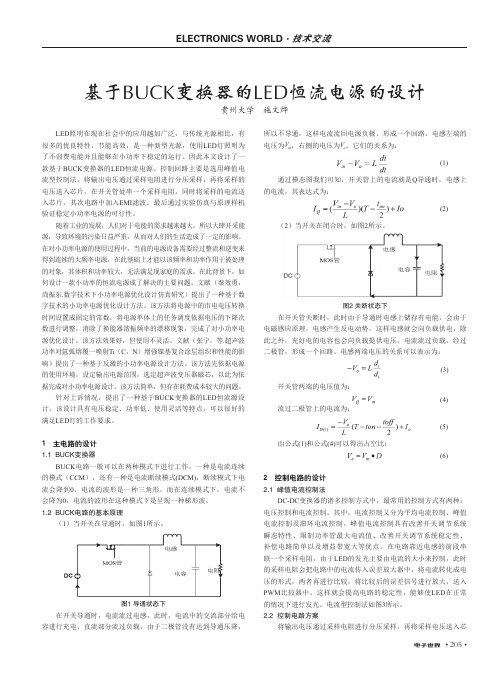
• 205•LED 照明在现在社会中的应用越加广泛,与传统光源相比,有很多的优良特性,节能高效,是一种新型光源,使用LED 灯照明为了不浪费电能并且能够在小功率下稳定的运行。
因此本文设计了一款基于BUCK 变换器的LED 恒流电源。
控制回路主要是选用峰值电流型控制法,将输出电压通过采样电阻进行分压采样,再将采样的电压送入芯片,在开关管处串一个采样电阻,同时将采样的电流送入芯片,其次电路中加入EMI 滤波。
最后通过实验仿真与原理样机验证稳定小功率电源的可行性。
随着工业的发展,人们对于电能的需求越来越大,所以大肆开采能源,导致环境的污染日益严重,从而对人们的生活造成了一定的影响。
在对小功率电源的使用过程中,当前的电源设备需要经过整流和逆变来得到连续的大频率电源,在此基础上才能以该频率和功率作用于被处理的对象,其体积和功率较大,无法满足现家庭的需求。
在此背景下,如何设计一款小功率的恒流电源成了解决的主要问题。
文献(秦效勇,尚振东.数字技术下小功率电源优化设计仿真研究)提出了一种基于数字技术的小功率电源优化设计方法。
该方法将电源中的市电电压转换时间设置成固定的常数,将电源单体上的任务调度依据电压的下降次数进行调整,消除了换能器谐振频率的漂移现象,完成了对小功率电源优化设计。
该方法效果好,但使用不灵活。
文献(张宁,等.超声波功率对氩弧熔覆一喷射Ti (C ,N )增强镍基复合涂层组织和性能的影响)提出了一种基于反激的小功率电源设计方法。
该方法先依据电源的使用环境,设定输出电源范围,选定超声波变压器磁芯,以此为依据完成对小功率电源设计。
该方法简单,但存在耗费成本较大的问题。
针对上诉情况,提出了一种基于BUCK 变换器的LED 恒流源设计。
该设计具有电压稳定、功率低、使用灵活等特点,可以很好的满足LED 灯的工作要求。
1 主电路的设计1.1 BUCK变换器BUCK 电路一般可以在两种模式下进行工作,一种是电流连续的模式(CCM ),还有一种是电流断续模式(DCM),断续模式下电流会降到0,电流的波形是一种三角形,而在连续模式下,电流不会降为0,电流的波形在这种模式下是呈现一种梯形波。
基于BUCK电路的功率驱动装置设计

3.1 电流大小控制模块设计
电流大小控制模块设计要求输入直流电 压为 24V,输出电压 0V 至 18V 连续可调,输 出电流值最大值为 8A。而 BUCK 电路主要应 用于低压大电流领域,应用 BUCK 电路原理
图 1:功率驱动装置总体结构
图 2:BUCK 电路原理图
可以实现电流大小控制模块设计。但是 BUCK 电路一般采用二极管进行续流,其导通电阻较 大,应用在大电流场合时,损耗很大。降低二 极管损耗的有效办法是选择低压降的二极管, 如肖特基二极管,但是低压降的肖特基二极管 漏电流与结电容也大,会产生更大的损耗,因 此通过综合各种因素考虑,本设计采用同步整 流方案,即使用导通电阻非常小的 MOS 管来 代替续流二极管,有效解决了续流管的导通损 耗问题,但同时对驱动电路提出了更高的要求。
• Electronic Technology 电子技术
基于 BUCK 电路的功率驱动装置设计
文/范志永 李子晓 张涛 金川
摘
本文介绍了应用于半导体温
控系统的一种基于 BUCK 电路的功 要 率驱动装置。针对半导体温控系
统中 TEC 模块的驱动特点,提出
了将功率驱动电流大小控制与功
率驱动电流方向控制两项功能分
所设计的电流大小控制模块如图 3 所示, 包括半桥接闸极驱动器、功率 MOS 管 Q1、 功率 MOS 管 Q2、功率电感 L1、滤波电容 C1 和电流取样电阻 R1。其中功率 MOS 管 Q1、 功率 MOS 管 Q2、功率电感 L1 和滤波电容 C1 组成了改进型 BUCK 电路,PWM 信号通过半 桥接闸极驱动器同步控制功率 MOS 管 Q1 和 Q2,Q1 导通时 Q2 截止,Q1 截止时 Q2 导通, 即可代替经典 BUCK 电路中二极管的续流功 能。
基于峰值电流控制的Buck—Boost型LED驱动器设计

彩、 长寿命 的新 型光 源 .理 论 上 ,E 的使 用 寿 命 LD 在 1 小 时 以上 , 是 在 实 际应 用 过程 中 , 为 0万 但 因 L D正 向伏 安 特 性 非 常 陡 ( 向 动 态 电 阻 非 常 E 正 小 )所 以要 给 L D供 电就 比较 困难 , 能 像 普通 , E 不 白炽灯 一样 , 直接用 电压 源 供 电 , 否则 电压 波 动稍
成 把 直 流 电压 转 换 成 直流 电压 % 的功 能 .输 出 电压 , o=D , <1 故 称 B c V D , u k电路 为 降压
电路 .
1 L D恒流驱 动器简介 E
L D照 明 系统 需 要 借 助 于 恒 流 供 电 , E 目前 主 流 的恒 流驱动设 计方 案 是利 用 线性 或 开 关 型 D / C
Fi. Th o tc n e r g2 e Bo s o v yo
的 电压 经 开关 管 S对 负载 R、 : £ 放 电.因 C和 : 此: = 一 , 流 的 增 量 △ L 电 += 2
( ) u kB ot 3 B c — os —— 升 降 压 电 路. 的输 出平 它 均 电 V :D ( D) o / 1一 压大 于或小 于输入 电压 ,
又可 以分 为电感 型 L D驱动 器和 开关 电容型 L D E E 驱 动器 .电感 型驱 动 器 方案 的优 点 是 驱 动 电流
( ) os 2 B ot 升 压 电路 . 的输 出 平 均 电压 —— 它
较 高 ,E L D端 电压 较低 、 耗较 低 、 率保 持 不 变 , 功 效
第 9卷 第 4期 21 0 0年 8月
广州 大学 学报 ( 自然科 学 版 )
buck-boost课程设计
湖南工程学院课程设计课程名称电力电子技术课程设计课题名称Buck-Boost变换器设计专业班级学号姓名指导教师2013 年月日湖南工程学院课程设计任务书课程名称电力电子技术课程设计课题Buck-Boost变换器设计专业班级学生姓名学号指导老师审批任务书下达日期2013年月日任务完成日期2013年月日目录第一章概述 (6)第二章Buck-Boost变换器设计总体思路 (7)2.1电路总设计思路 (7)2.2电路设计原理与框图 (7)第三章Buck-Boost主电路设计 (8)3.1 Buck-Boost主电路基本工作原理 (8)3.2主电路保护(过电压保护) (10)3.3 Buck-boost变换器元件参数 (11)3.3.1 占空比 (11)3.3.2滤波电感L (11)3.3.3滤波电容 (11)3.4 Buck-Boost仿真电路及结果 (12)3.4.1 Buck-Boost变换器仿真模型 (12)3.4.2不同占空比 的仿真结果 (13)第四章控制和驱动电路模块 (17)4.1SG3525脉冲调制器控制电路 (17)4.1.1 SG3525简介 (17)4.1.2 SG3525内部结构和工作特性 (17)4.2SG3525构成控制电路单元电路图 (20)4.3驱动电路设计 (20)第五章总体与体会 (21)第六章参考文献 (22)第七章附录 (23)第一章概述自20世纪50年代,美国宇航局以小型化重量轻为目标而为搭载火箭开发首个开关电源以来,在半个多世纪的发展中,开关电源逐步取代了传统技术制造的相控稳压电源,并广泛应用于电子整机设备中。
随着集成电路的发展,开关电源逐渐向集成化方向发展,趋于小型化和模块化。
近20年来,集成开关电源沿两个方向发展。
第一个方向是对开关电源的控制电路实现集成化。
与国外开关电源技术相比,国内从1977年才开始进入初步发展期,起步较晚、技术相对落后。
目前国内DC/DC模块电源市场主要被国外品牌所占据,它们覆盖了大功率模块电源的大部分以及中小功率模块电源一半的市场。
用PT4107制作BUCK电路的LED驱动电路
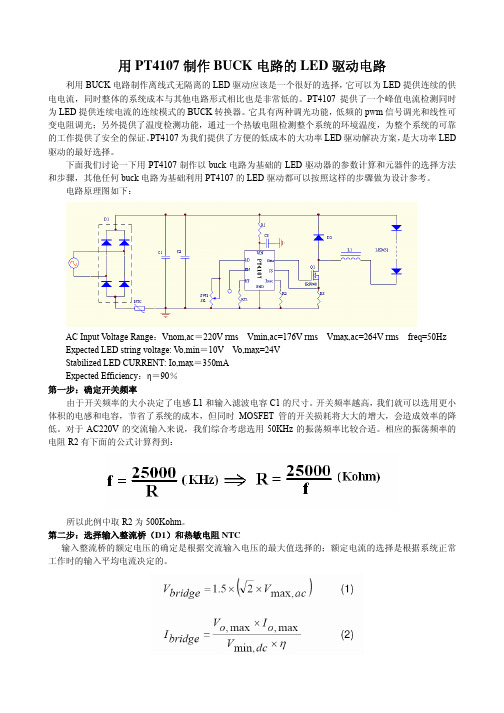
用PT4107制作BUCK电路的LED驱动电路利用BUCK电路制作离线式无隔离的LED驱动应该是一个很好的选择,它可以为LED提供连续的供电电流,同时整体的系统成本与其他电路形式相比也是非常低的。
PT4107提供了一个峰值电流检测同时为LED提供连续电流的连续模式的BUCK转换器。
它具有两种调光功能,低频的pwm信号调光和线性可变电阻调光;另外提供了温度检测功能,通过一个热敏电阻检测整个系统的环境温度,为整个系统的可靠的工作提供了安全的保证。
PT4107为我们提供了方便的低成本的大功率LED驱动解决方案,是大功率LED 驱动的最好选择。
下面我们讨论一下用PT4107制作以buck电路为基础的LED驱动器的参数计算和元器件的选择方法和步骤,其他任何buck电路为基础利用PT4107的LED驱动都可以按照这样的步骤做为设计参考。
电路原理图如下:AC Input V oltage Range:Vnom,ac=220V rms Vmin,ac=176V rms Vmax,ac=264V rms freq=50Hz Expected LED string voltage: V o,min=10V V o,max=24VStabilized LED CURRENT: Io,max=350mAExpected Efficiency:η=90%第一步:确定开关频率由于开关频率的大小决定了电感L1和输入滤波电容C1的尺寸。
开关频率越高,我们就可以选用更小体积的电感和电容,节省了系统的成本,但同时MOSFET管的开关损耗将大大的增大,会造成效率的降低。
对于AC220V的交流输入来说,我们综合考虑选用50KHz的振荡频率比较合适。
相应的振荡频率的电阻R2有下面的公式计算得到:所以此例中取R2为500Kohm。
第二步:选择输入整流桥(D1)和热敏电阻NTC输入整流桥的额定电压的确定是根据交流输入电压的最大值选择的;额定电流的选择是根据系统正常工作时的输入平均电流决定的。
buck 峰值电流控制电路

buck 峰值电流控制电路峰值电流控制电路是一种常见的电路设计,它能够有效地控制电流的峰值值。
在现代电子设备和对电流控制要求较高的应用中,这种电路设计起着非常重要的作用。
本文将介绍峰值电流控制电路的原理、优点以及如何设计和应用。
峰值电流控制电路的原理基于电流峰值的调节。
它可以通过改变电路中的电压、电阻或电感等元件的数值,有效地控制电流的峰值值。
这种控制方法通常被应用于功率放大器、电源管理和电流传感器等设备中。
它能够保证电流在设定的范围内稳定工作,避免了过流带来的损坏和安全风险。
峰值电流控制电路有许多优点。
首先,它能够提供稳定的电流输出。
通过调整电路中的元件数值,我们可以确保电流不会超过设定的峰值,从而保护电路和设备的安全。
其次,峰值电流控制电路还能提高系统的效率。
通过控制电流的峰值,我们可以减少能量的浪费,提高整个系统的能源利用率。
此外,峰值电流控制电路还可以保护电路元件,延长其寿命,降低维修和更换的成本,提高设备的可靠性。
那么,如何设计和应用峰值电流控制电路呢?首先,我们需要明确目标,了解需要控制的电流峰值范围。
然后,根据具体的应用需求选择合适的电路设计方案。
常见的峰值电流控制电路包括可变电阻、可变电感和可变电压源等。
在电路设计过程中,需要综合考虑电流响应时间、功率损耗和成本等因素。
最后,将设计好的电路应用到具体的系统中,并进行测试和调试,确保其在实际工作中能够稳定可靠地控制电流的峰值。
总之,峰值电流控制电路是一种非常重要的电路设计,它能够有效地控制电流的峰值值,提高系统的效率和可靠性。
在电子设备和对电流控制要求较高的应用中,峰值电流控制电路起着不可或缺的作用。
通过合理的设计和应用,我们可以实现电流的稳定输出,保护电路和设备的安全。
希望本文对读者理解和应用峰值电流控制电路有所帮助。
基于Buck_Boost型高效半导体照明驱动研究_徐仁伯1_2_李勇智3
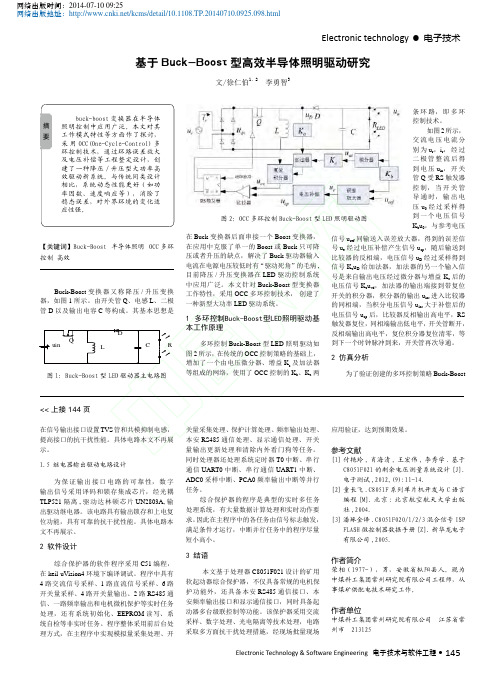
Electronic technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 1451.5 继电器输出驱动电路设计为保证输出接口电路的可靠性,数字输出信号采用译码和锁存集成芯片,经光耦TLP521隔离,驱动达林顿芯片UN2803A,输出驱动继电器。
该电路具有输出锁存和上电复位功能,具有可靠的抗干扰性能。
具体电路本文不再展示。
2 软件设计综合保护器的软件程序采用C51编程,在keil uVision4环境下编译调试。
程序中具有4路交流信号采样、1路直流信号采样、6路开关量采样、4路开关量输出、2路RS485通信、一路频率输出和电机微机保护等实时任务处理,还有系统初始化、EEPROM 读写、系统自检等非实时任务。
程序整体采用前后台处理方式,在主程序中实现模拟量采集处理、开同时处理器还处理系统定时器T0中断、串行通信UART0中断、串行通信UART1中断、ADC0采样中断、PCA0频率输出中断等并行任务。
综合保护器的程序是典型的实时多任务处理系统,有大量数据计算处理和实时动作要求。
因此在主程序中的各任务由信号标志触发,满足条件才运行,中断并行任务中的程序尽量短小高小。
3 结语本文基于处理器C8051F021设计的矿用软起动器综合保护器,不仅具备常规的电机保护功能外,还具备本安RS485通信接口、本安频率输出接口和显示通信接口,同时具备起动器多台级联控制等功能。
该保护器采用交流采样、数字处理、光电隔离等技术处理,电路采取多方面抗干扰处理措施,经现场批量现场[1]付艳玲,肖海清,王宏伟,李秀学.基于C8051F021的剩余电压测量系统设计[J].电子测试,2012,(9):11-14.[2]童长飞.C8051F 系列单片机开发与C 语言编程[M].北京:北京航空航天大学出版社,2004.[3]潘琢金译.C8051F020/1/2/3混合信号ISPFLASH 微控制器数据手册[Z].新华龙电子有限公司,2005.作者简介荣相(1977-),男,安徽省枞阳县人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PWM电路进行了反馈控制.仿真结果表明。该型LED驱动器有较好的稳定性,对负载扰动和输入电压扰动的
抑制能力较强.
关键词:Buck—Boost;峰值电流;驱动器:LED
中图分类号:TM 923
文献标志码:A
LED是一种节能、环保、小尺寸、快速、多色 彩、长寿命的新型光源.理论上,LED的使用寿命 在10万小时以上,但是在实际应用过程中,因为 LED正向伏安特性非常陡(正向动态电阻非常 小),所以要给LED供电就比较困难,不能像普通 白炽灯一样,直接用电压源供电,否则电压波动稍 增,电流就会增大到将LED烧毁的程度….为了 稳住LED的工作电流,保证LED能正常可靠地工 作,各种各样的LED驱动电路就应运而生了.
0 O
图6 LED电流波形
Fig.6 The wavefolln of the current through LED
当微分环节为零时,由于在一个开关周期内, 当系统处于稳态时,检测电阻的电流的稳态误差 为零.可得
瓢(%一KJ川, 等·[r嚣(%一k№+丘(%一
k№】姐 简化得 iKp·e嚣K~出=瓦%.
2009(14):29—32.(in Chinese)
收稿日期:2010—04—10;修回日期:2010—05—21 作者简介:邓文婷(1983一),女,助理实验师,工学硕士.E—mail:dwt4250@g.ha.edu.cn
万方数据
广州大学学报(自然科学版)
第9卷
图2 Boost变换器
Fig.2 The Boost conveyor
(3)Buck-Boost——升降压电路.它的输出平 均电vo=Dv/(1一D)压大于或小于输入电压仫, 极性相反,电感传输.图3中通过控制开关管|s的 PWM信号中的占空比,便可达到升降压的目的, 输出电压Vo=DVs/(1一D).Buck-Boost电路可实 现很宽的升/降压比例,适合输入电压波动范围大 的场合.
References: [1]FENG Yong,YANG Xu.Design for white light LED constant—current controllable driving system[J].Electric Switchgear,
2008(4):29-31.(in Chinese) [2]HOU Zhen-yi.The technology and application of DC—switching power supply[M].Beijing:Publishing House of Electronics
在二极管导通的To搠Jh],圪-=%一K=Vo.
开关管S导通结束时其电流最大值,s一也是 二极管D1在其导通开始时的电流最大值,D。一, 且,sⅢ=101Ⅲ=ILinu。+J位m.
电源输入功率比厶=Volo,电源电流,s= %,o/K=loD/(1一D),易得
In~+l‰=Is+{-△Iu+lo+{FA|口=
由公式可以看出,电流控制的时间处在开关 导通的区间,可以通过控制开关管导通时的电流 来完Jj!i:一个周朔的由.流粹制.
4 仿真结果
用PSIM6.0仿真得到输出电流及开关管的占 空比波形如图6、图7所示.可以看出,基于PID 控制的峰值电流控制PWM的Buck—Boost型驱动 器的稳态精度、稳定性较好,抗负载扰动和抗输入 电压扰动的抑制能力较强,电路输出电流的启动 较为平缓,稳定后输出电流的误差得到减小.
彳厶l cIII
):v。一s
£:也
士(
! 。1 (
广
图5基于PID的峰值电流控制PWM反馈电路图
Fig.5 The reactive circuit that PWM is controlled by the peak current based 011 PID algorithm
PID控制补偿器的传递函数为
邓文婷1,曲 颖2
(1.广州大学实验中心、网络与现代教育技术中心,广东广州510006; 2.楚雄高级技工学校,云南楚雄675000)
摘要:LED以其发光效率高和寿命长两大优势在现代照明领域中得到很快的发展,各种类型的驱动电路也
应运而生,文章设计的LED驱动的主电路是Buck.Boost型的DC/DC变换电路,应用PID算法的峰值电流控制
优点而被广泛应用H“J. 峰值电流控制PWM电路的基本原理是:输出
检测电压k。与参考电压%经误差比较器后得
到一个误差电压信号K,K经过补偿网络后得到
信号亿再与电感电流的检测电阻电压‰。比较,
由恒频时钟的脉冲置位锁存器输出脉冲.当匕。 幅度达到K。电平时,PWM比较器的状态反转,锁 存器复位,驱动撤除导致功率管Is关断,续流二极 管D1导通,电感电流开始下降‘电路逐个地检测 和调节电流脉冲,由此控制电源输出的电流.
第9卷第4期 2010年8月
广州大学学报(自然科学版) Journal of Guan昏zhou University(Natural Science Edition)
文章编号:1671-4229(2010)04-0023-05
V01.9 Aug.
No.4 2010
基于峰值电流控制的Buck—Boost型 LED驱动器设计
压‰.、%(即负载电压%)是恒定不变的.
-r )+ 一s
5 7DI乞一巴:R
Fig.4
图4 Buck-Boost变换电路主回路 The main loop of the Buck—Boost converting circuit
在To。=Dt期I司,S导通,D1截止·这时电源
仫经£I和开关管s短接,因此耽,=£。百diu=K,
图7占空比D波形图
Fig.7 The waveform of the duty cycle D
5 结语
LED的体积小,驱动电压低,便于照明设计, 也便于和数字技术相结合,再加上其本身的寿命 长,光效高,和传统光源比起来有很大优势.影响 LED光强稳定的因素很多,光源电压或电流的波 动、电路元件的老化、外界杂光、环境温度以及光 源自身老化等等都叮能造成LED光源的不稳定, 而驱动的稳定性是最关键的影响因素"。10。.LED 的驱动技术目前在逐渐走向成熟,随着技术的不 断更新,我们除了关注驱动电路的稳定性外,也应 该向着节能、高效和环保的目标不断升级,这是未 来工程师们要接受的挑战.
爿 ,s
)+
£ j -Dl
l
c串 Ri
I
图1 Buck变换器
Fig.1 The Buck convertor
(2)Boost——升压电路.它的输出平均电压 %大于输入电压仫,两电压极性相同.图2中线 路由开关管S、电感L、电容C组成,完成把电压玩 升压到%的功能.输出电压,Vo=V。/(1一D)又 D<1,故Boost为升压电路.
万方数据
第4期
邓文婷等:基于峰值电流控制的Buck—Boost型LED驱动器设计
25
厶尚+,o+{-(AtL。+AIL2)=
,o而D+等=,o尚+券.
式中的等历D+瓦DVZs,开关管s和二极管。l在截
止时所承受的电压为:以=vo,=%。=蚝+Vo= 珞埸
(%一K)(1一D)瓦,故有尚=堡亩垦,可得到%= 南K,(%一%)DTs=Vo(1一D)Ts,故有尚=
丽Vo ,可得到鲁=。,因此,可以计算出Buck-Boost
变换器的变压比:肘=VKo=%Vo·告=而D 上式的
物理意义为:稳定运行时,一个开关周期瓦中,电感 厶、厶的电流增量为零,电感两端的直流平均值为零, 正、负伏秒积抵消.由此,可以直接由图4得到%= K+%,开关管导通的To。期间,%=%。一Vo=%,
Industry,2007:58-62.(in Chinese) [3]ABRAHAM I.P.The design of switching power supply[M].Beijing:Publishing House of Electronics Industry,2005:12-
16.(in Chinese) [4]WANG Yan—ping,WEN Lu。DAI Yu.xing.Design of LED lighting power based 011 PFC circuit[J].Low Voltage Apparatus,
,’
1+sR3C2
1+sR2C1
%2—石一’百而再面忑百2
G伽脊
万方数据
广州大学学报(自然科学版)
第9卷
式中,G删=瓣R3 i,∞。=志,∞。=矗,
嘶2丽‘ Rl+R2
根据PID控制原理,可得
T。掣】. %=缉·【(%一K。。)+丢e(%一K。。)出+
40 35 30 25 20 15 lO 05
D1续流并对c。充电而减小,屹。=£。百diLl=K—
K。,电流i。。的减少量,△i小:垦字羔(1一D)瓦,与
此同时,i位也经D1续流而向负载供电,iv.也减少,
由于%=如警=一Vo,电流如的减少量△幺一=
÷旦(1一D)瓦.稳定运行时,在一个周期孔中,in
的增量Ai”应等于其减少量Zii小,i髓的增量 Aik+应等于其减少量△七一.因此可以得到:瞻D瓦=
峰值电流控制PWM方式是双闭环控制模式, 即电压外环控制与电流内环控制.系统为二阶系
统.输出滤波参数£C大,频率参数fo=l/2qr√比
较低,所以,在中频段系统是以一40 dB·dec‘1的 斜率穿越零分贝线的,如果采用PI调节器,可以 减小稳态误差,要想加快其响应速度,则需增大比 例系数Ⅺ,这将导致系统不稳定.为使系统满足 稳态性能、动态性能和稳定性要求,应对系统进行 校正,根据幅频特性,采用PID调节器可以满足要 求.图5是PID控制的峰值电流型控制电路模 型图.
1一n—n’
3 基于PID控制的峰值电流控制 PWM反馈电路