电力拖动自动控制系统-课后答案.
#《电力拖动自动控制系统》习题答案1
第一章闭环控制的直流调速系统1-1 为什么PWM—电动机系统比晶闸管—电动机系统能够获得更好的动态性能?答:PWM—电动机系统在很多方面有较大的优越性:(1)主电路线路简单,需用的功率器件少。
(2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小。
(3)低速性能好,稳速精度高,调速范围宽,可达1:10000左右。
(4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强。
(5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也不大,因而装置效率较高。
(6)直流电源采用不控整流时,电网功率因数比相控整流器高。
1-2 试分析有制动通路的不可逆PWM变换器进行制动时,两个VT是如何工作的。
答:在制动状态中,为负值,就发挥作用了。
这种情况发生在电动运行过程中需要降速的时候。
这时,先减小控制电压,使di2VT1gU的正脉冲变窄,负脉冲变宽,从而使平均电枢电压降低。
但是,由于机电惯性,转速和反电动势还来不及变化,因而造成,很快使电流反向,截止,在dUdEU>di2VDont≤<T时,2gU变正,于是导通,反向电流沿回路3流通,产生能耗制动作用。
在<T+时,关断,2VTTt≤ont2VTdi.沿回路4经续流,向电源回馈制动,与此同时,两端压降钳住使它不能导通。
在制动状态中,和轮流导通,而始终是关断的。
1VD1VD1VT2VT1VT1VT在轻载电动状态,这时平均电流较小,以致在关断后经续流时,还没有达到周期T,电流已经衰减到零,这时两端电压也降为零,便提前导通了,使电流反向,产生局部时间的制动作用。
1VTdi2VD2VD2VT1-3调速范围和静差率的定义是什么?调速范围、静差速降和最小静差率之间有什么关系?为什么说“脱离了调速范围,要满足给定的静差率也就容易得多了”?答:生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围,用字母D表示,即maxminnDn= 其中,和一般都指电动机额定负载时的最高和最低转速,对于少数负载很轻的机械,可以用实际负载时的最高和最低转速。
电力拖动自动控制系统课后题答案

多少? (4)计算放大器所需的放大倍数。 解: (1)先计算电动机的电动势系数
Ce =
U N − I N Ra 220 − 12.5 × 1.2 = = 0.1367V ⋅ min/ r 1500 nN
PN = 18kW, U N = 220V, 某调速系统原理图如图 1-58 所示, 已知数据如下: 电动机;
I N = 94 A,n N = 1000r / min , Ra = 0.15Ω ,整流装置内阻 Rrec = 0.3Ω ,触发整流环节
的放大倍数 K s = 40 。最大给定电压 U nm = 15V ,当主电路电流达到最大值时,整定电流 反馈电压 U im = 10V 设计指标: 要求系统满足调速范围 D=20, 静差率 s ≤ 10% ,I dbl = 1.5 I N, 。I dcr = 1.1I N 。 试画出系统的静态结构框图,并计算: (1) 转速反馈系数 α 。 (2) 调节器放大系数 K p 。 (放大器输入电阻 R0 = 20k Ω ) (3) 电阻 R1 的数值。 (4) 电阻 R2 的数值和稳压管 VS 的击穿电压值。 解: (1)转速负反馈系数 α 应该是
K=
Δnop Δncl
−1 =
240 − 1 = 59.8 3.95
则若要求系统的静差率由 10%减少到 5%,则系统的开环增益将变大。 1—8 转速单闭环调速系统有那些特点?改变给定电压能否改变电动机的转速?为什么? 如果给定电压不变,调节测速反馈电压的分压比是否能够改变转速?为什么?如果 测速发电机的励磁发生了变化,系统有无克服这种干扰的能力? 答: (1)转速单闭环调速系统有以下三个基本特征 ①只用比例放大器的反馈控制系统,其被被调量仍是有静差的。 ②反馈控制系统的作用是:抵抗扰动,服从给定。扰动性能是反馈控制系统最突出的特 征之一。
电力拖动自动控制系统课后答案
习 题 二系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少?解:10000.02(100.98) 2.04(1)n n sn rpm D s ∆==⨯⨯=-系统允许的静态速降为2.04rpm 。
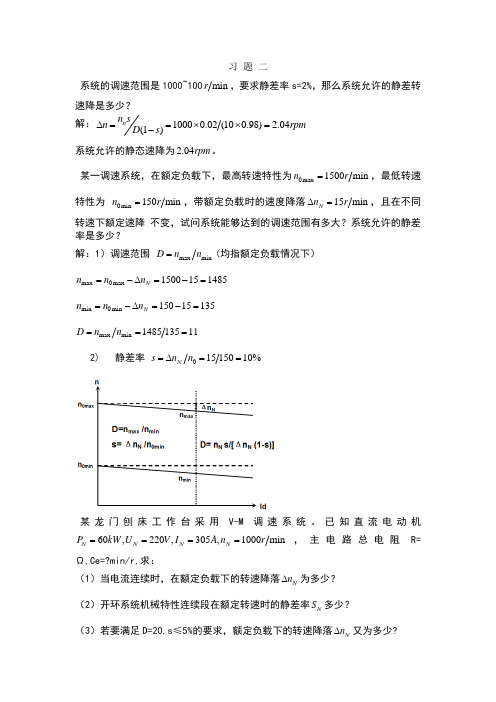
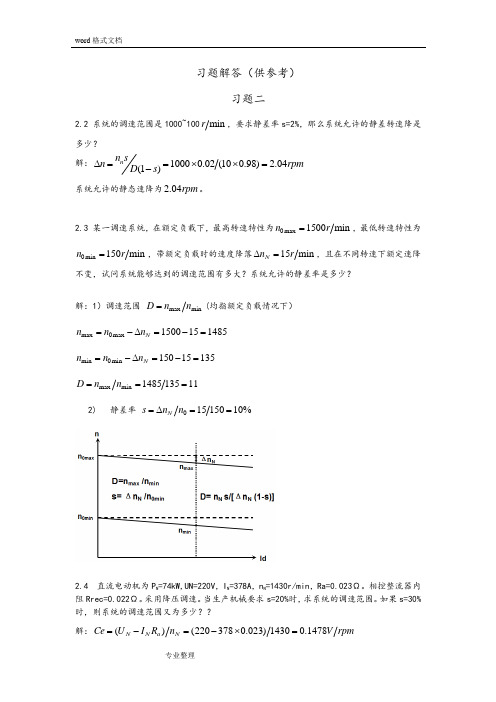
某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ∆=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?解:1)调速范围 max min D n n =(均指额定负载情况下)max 0max 1500151485N n n n =-∆=-= min 0min 15015135N n n n =-∆=-= max min 148513511D n n ===2) 静差率 01515010%N s n n =∆==某龙门刨床工作台采用V-M 调速系统。
已知直流电动机60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=Ω,Ce=?min/r,求:(1)当电流连续时,在额定负载下的转速降落N n ∆为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ∆又为多少?解:(1)3050.180.2274.5/min N N n I R r ∆=⨯=⨯= (2) 0274.5(1000274.5)21.5%N N S n n =∆=+=(3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=某闭环调速系统的调速范围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态速降是100r/min ,则闭环系统的开环放大倍数应有多大? 解: 1)()s n s n D N N -∆=1/1015002%/98%N n =⨯∆⨯15002%/98%10 3.06/min N n r ∆=⨯⨯=有一V-M 调速系统:电动机参数P N =, U N =220V, I N =12.5A, n N =1500 r/min ,电枢电阻R a =Ω,电枢回路电抗器电阻RL=Ω,整流装置内阻R rec =Ω,触发整流环节的放大倍数K s =35。
电力拖动自动控制系统(第三版)_陈伯时_习题答案(全部).docx
第一章:闭环控制的直流调速系统000001-1为什么PWM-电动机系统比晶闸管■电动机系统能够获得更好的动态性能答:PWM系统与V・M系统相比,在很多方面有较大的优越性:(1)主电路线路简单,需用的功率器件少;(2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小;(3)低速性能好,稳速精度高,调速范围宽,可达1: 10000左右;(4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强;(5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也大,因而装置效率较高;(6)直流电源采用不控整流时,电网功率因数比相控整流器高;1-2试分析有制动通路的不可逆PWM变换器进行制动时,两个VT是如何工作的。
答:如图P13, 1-17,制动状态时,先减小控制电压,使Ugi的正脉冲变窄,负脉冲变宽,从而使平均电枢电压Ud降低。
但是,由于机电惯性,转速和反电动势还来不及变化,因而造成E>Ud,很快使电流id反向,VD2截止,在tonWtVT时,Ug2变正,于是VT2导通,反向电流沿回路3流通,产生能耗制动作用。
在TWtV T+Z(即下一周期的0WtVTon)时,VT2关断,・id沿回路4经VDi续流,向电源回馈制动,与此同时,VDi两端压降钳住VTi使它不能导通。
在制动状态中,VT2和VDi轮流导通,而VTi始终是关断的。
有一种特殊状态,即轻载电动状态,这时平均电流较小,以致在VTi关断后id经VD2续流时,还没有达到周期T,电流已经衰减到零,这时VD2两端电压也降为零,VT2便提前导通了,使电流反向,产生局部时间的制动作用。
1-3调速范围和静差率的定义是什么调速范围、静差速降和最小静差率之间有什么关系为什么说“脱离了调速范围,要满足给定的静差率也就容易得多了” 答:生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围,用字母nNS --------------100%—100%』100% 10%no系统能够达到的调速范围为:nOmin150当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落A DN 与理想空载转速no 之比,称作静差率s,即nN s ---------no调速范围、静态速降和最小静芜率Z 间的关系是:按上述关系可得出:D 越小,s 越小,D 越大,s 越大;D 与s 相互制约,所以说 “脱离了调速范围,要满足给定的静差率也就容易得多了1・4某一调速系统,测得的最高转速特性为 DOrnax定速降"N 不变,试问系统能够达到的调速范围有多大系统允许的静差率是多少解:思路一:系统能够达到的调速范围为:系统允许的静差率:思路二:系统允许的静差率:D 表示,即:rimaxD ——nminFIN S minD -----------------------nN (1 Smin )1500r/min ,最低转速特性为no min 150r/min ,带额定负载时的速度降落nN15r/mU1,且在不同转速下额Flniax riO max150011riminnOminnN150 15nN100% ———15100% 10%nN D nN150011 15nmin所以系统允许的静态速降:调速范围可以扩大多少倍 解:因为:Ridnci ---------------------------Ce (1 K)所以:nN sn s0 maxD ---------------------------nN (1 s)1500 0.1-------------------- 11nN (1 s) 15 (1 0.1)1-5某闭环调速系统的调速范围是1500〜150r/min ,要求系统的静差率s 2%,那么系统允许的静态速降是多少如果开环系统的静态速降是 100r/min ,则闭环系统的开环放大倍数应有多大 解:因为:nmax1500-------- 10150nNSnND(1 s) rimax SD(1 s)10 1500 0.02----------------- 3.06r / min (1 0.02)又:flopnci -----------------n O p lOOr / min1故闭环系统的开环放大倍数:K, cin°p100 1 31.68ncl3.061-6某闭环调速系统的开环放大倍数为 15 时,额定负载下电动机的速降为8r/min ,如果将开环放大倍数提高到30,它的速降为多少在同样静差率要求下,nd (1 K) 8 (1 15) 128CeK=30时,电动机在额定负载下的速降为:240r/min,若要求系统的静差率由10%减少到5%,则系统的开环增益将如何变化解:当静差率s 二10%时,nN snN1500 0.1 8.33r / min20 (1 0.1) 当静差率s 二5%时,nN snND(1 s)n°p1500 0.05 3.95r / min20(1 0.05) 240帘 1 159.8ncl 3.95因此,若要求系统的静差率由10%减少到5%,则系统的开环增益将从变化到。
电力拖动自动控制系统课后答案
习 题 二之南宫帮珍创作2.2 系统的调速范围是1000~100min r , 要求静差率s=2%, 那么系统允许的静差转速降是几多?解:10000.02(100.98) 2.04(1)n n s n rpm D s ∆==⨯⨯=- 系统允许的静态速降为2.04rpm .2.3 某一调速系统, 在额定负载下, 最高转速特性为0max 1500min n r =, 最低转速特性为 0min 150min n r =, 带额定负载时的速度降落15min N n r ∆=, 且在分歧转速下额定速降 不变, 试问系统能够到达的调速范围有多年夜?系统允许的静差率是几多? 解:1)调速范围 max min D n n =(均指额定负载情况下) 2) 静差率 01515010%N s n n =∆==2.5 某龙门刨床工作台采纳V-M 调速系统.已知直流电念头60,220,305,1000min N N N N P kW U V I A n r ====Ω•min/r,求:(1)当电流连续时, 在额定负载下的转速降落N n ∆为几多? (2)开环系统机械特性连续段在额定转速时的静差率N S 几多? (3)若要满足D=20,s ≤5%的要求, 额定负载下的转速降落N n ∆又为几多?解:(1)3050.18274.5/min N N n I R r ∆=⨯=⨯= (2) 0274.5274.5)21.5%N N S n n =∆=+=(3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=2.7 某闭环调速系统的调速范围是1500r/min~150r/min, 要求系统的静差率5%s ≤, 那么系统允许的静态速降是几多?如果开环系统的静态速降是100r/min, 则闭环系统的开环放年夜倍数应有多年夜?解: 1)()s n s n D N N -∆=1/2.9 有一V-M 调速系统:电念头参数P N =2.2kW, U N =220V, I N =, n N =1500 r/min, 电枢电阻R a =Ω, Ω, 整流装置内阻R rec =1.0Ω,触发整流环节的放年夜倍数K s =35.要求系统满足调速范围D=20, 静差率S<=10%.(1)计算开环系统的静态速降Δn op 和调速要求所允许的闭环静态速降Δn cl .(2)采纳转速负反馈组成闭环系统, 试画出系统的原理图和静态结构图.(3)调整该系统参数, 使当U n *=15V 时, I d =I N , n=n N , 则转速负反馈系数 α应该是几多?(4)计算放年夜器所需的放年夜倍数. 解:(1)所以, min /33.8r n cl =∆ (2) (3)(4)()()()()[]()()[]K C R I K KU K C R I U K K n e d n e d n s p +-+=+-=**1/1/1/α可以求得, *35.955*0.13414.34*35*0.0096e p sK C K Kα=== 也可以用粗略算法:n U U n nα=≈*, 01.0150015*===n U n α 2.12 有一个晶闸-电念头调速系统, 已知:电念头:kWP N8.2=,VU N 220=, A I N 6.15=, 1500=N n r/min, a R Ω, 整流装置内阻rec R =1Ω,电枢回路电抗器电阻L R Ω, 触发整流环节的放年夜倍数35=s K . (1)系统开环工作时, 试计算调速范围30=D 时的静差率s 值. (2)当30=D , %10=s 时, 计算系统允许的稳态速降.(3)如组成转速负反馈有静差调速系统, 要求30=D , %10=s , 在VU n 10*=时NdI I =, N n n =, 计算转速负反馈系数α和放年夜器放年夜系数p K . 解: (1) (2) (3)2.13旋转编码器光栅数1024, 倍频系数4, 高频时钟脉冲频率MHz 1f 0=, 旋转编码器输出的脉冲个数和高频时钟脉冲个数均采纳16位计数器, M 法测速时间为0.01s, 求转速min /r 1500n =和min /r 150n =时的测速分辨率和误差率最年夜值.解:(1)M 法:分辨率min /465.101.0410246060r ZT Q c =⨯⨯== 最年夜误差率:→=cZT M n 160min /1500r n =时, 10246001.0102441500601=⨯⨯⨯==c nZT M min /150r n =时, 4.1026001.010*********=⨯⨯⨯==c nZT M min /1500r 时, %098.0%10010241%1001%1max =⨯=⨯=M δ min /150r 时, %98.0%1004.1021%1001%1max =⨯=⨯=M δ 可见M 法适合高速. (2)T 法: 分辨率:min /1500r n =时, min /17115004102510160150041024606202r Zn f Zn Q =⨯⨯-⨯⨯⨯⨯=-= min /150r n =时, min /55.1150410241016015041024606202r Zn f Zn Q =⨯⨯-⨯⨯⨯⨯=-= 最年夜误差率:2060ZM f n =, Znf M 0260=,那时min /1500r n =, 77.9150041024106062=⨯⨯⨯=M那时min /150r n =, 7.9715041024106062=⨯⨯⨯=Mmin /1500r n =时, %4.11%100177.91%10011%2max =⨯-=⨯-=M δmin /150r n =时, %1%10017.971%10011%2max =⨯-=⨯-=M δ可见T 法适合低速习题三3.1双闭环调速系统的ASR 和ACR 均为PI 调节器, 设系统最年夜给定电压*nm U =15V, N n =1500r/min, N I =20A, 电流过载倍数为2,电枢回路总电阻R =2Ω, s K =20, e C ·min/r, 求:(1)当系统稳定运行在*n U =5V, dL I =10A 时, 系统的n 、n U 、*i U 、i U 和c U 各为几多?(2)当电念头负载过年夜而堵转时, *i U 和c U 各为几多? 解:(1)(2)堵转时, V I U dm i 15*==β,3.2 在转速、电流双闭环调速系统中, 两个调节器ASR, ACR 均采纳PI 调节器.已知参数:电念头:N P , N U =220V, N I =20A, N n=1000 r/min ,电枢回路总电阻R Ω,设cm im nm U U U ==** =8V, 电枢回路最年夜电流dm I =40A,电力电子变换器的放年夜系数s K =40.试求:(1)电流反馈系数β和转速反馈系数α.(2)当电念头在最高转速发生堵转时的,0d U c i i U U U ,,*值. 解:1)**880.2/0.008/401000im nm dm N U V U V V AV rpm I A n rpmβα======2) 040*1.560d dl e N dl U E I R C n I R A V ∑∑=+=+=Ω=这时:*8,0n n U V U ==, ASR 处于饱和, 输出最年夜电流给定值.*8,8,i i U V U V == 06040 1.5C d S U U K V ===3.3 在转速、电流双闭环调速系统中, 调节器ASR, ACR 均采纳PI 调节器.当ASR 输出到达*im U =8V 时, 主电路电流到达最年夜电流80A.当负载电流由40A 增加到70A 时, 试问:(1)*i U应如何变动?(2)c U 应如何变动?(3)c U 值由哪些条件决定?解: 1)*80.1/80im dm U V V A I Aβ=== 因此当电流从40A ⇒70A 时, *iU 应从4V ⇒7V 变动. 2)CU 要有所增加.3) C U 取决于机电速度和负载年夜小.因为0d dl e N dl U E I R C n I R ∑∑=+=+()0e d d c ss C n I R U U K K +== 3.5 某反馈控制系统已校正成典范I 型系统.已知时间常数T=0.1s, 要求阶跃响应超调量σ≤10%.(1) 系统的开环增益.(2) 计算过度过程时间s t 和上升时间r t ;(3) 绘出开环对数幅频特性.如果要求上升时间r t <0.25s, 则K=?, σ%=?解:取0.69,0.6,%9.5%KT ξσ===(1) 系统开环增益:0.69/0.69/0.1 6.9(1/)K T s === (2) 上升时间 3.30.33r t T S ==过度过程时间: (3)如要求0.25r t s <, 查表3-1则应取 1,0.5KT ξ== ,2.4 2.4*0.10.24r t T s === 这时1/10K T ==%.习题六6.1 按磁动势等效、功率相等的原则, 三相坐标系变换到两相静止坐标系的变换矩阵为现有三相正弦对称电流s()A m i I co t ω=, 2s()3B m i I co t πω=-,2cos()3C m i I t πω=+, 求变换后两相静止坐标系中的电流αs i 和βs i , 分析两相电流的基本特征与三相电流的关系. 解:两相静止坐标系中的电流 其中, 0A B C i i i ++=两相电流与三相电流的的频率相同, 两相电流的幅值是三相电流, 两相电流的相位差2π.6.2 两相静止坐标系到两相旋转坐标系的变换阵为将上题中的两相静止坐标系中的电流αs i 和βs i 变换到两相旋转坐标系中的电流sd i 和sq i , 坐标系旋转速度1ωϕ=dtd .分析那时ωω=1, sd i 和sq i 的基本特征, 电流矢量幅值22sq sd s i i i +=与三相电流幅值m I 的关系, 其中ω是三相电源角频率. 解:两相静止坐标系中的电流 两相旋转坐标系中的电流 那时1ωϕ=dtd , 1t ϕω=, 两相旋转坐标系中的电流 电流矢量幅值。
《电力拖动自动控制系统》参考答案

《电力拖动自动控制系统》参考答案:第一章一、填空题:1.答案:静止可控整流器直流斩波器2.答案:调速范围静差率.3.答案:恒转矩、恒功率4.答案:脉冲宽度调制二、判断题:答案:1.×、2. √、三、问答题:1.答案:生产机械的转速n与其对应的负载转矩T L的关系。
1.阻转矩负载特性;2.位转矩负载特性;3.转矩随转速变化而改变的负载特性,通风机型、恒功率、转矩与转速成比例;4.转矩随位置变化的负载特性。
2.答案:放大器的放大系数K p,供电电网电压,参数变化时系统有调节作用。
电压负反馈系统实际上只是一个自动调压系统,只有被反馈环包围部分参数变化时有调节作用。
3.答案:U d减少,转速n不变、U d增加。
4.答案:生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围。
当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的转速降落与理想空载转速之比,称作转差率。
静态速降值一定,如果对静差率要求越严,值越小时,允许的调速范围就越小。
5.答案:反馈控制系统的作用是:抵抗扰动,服从给定。
系统能有效地抑制一切被负反馈环所包围的前向通道上的扰动作用。
但完全服从给定作用。
反馈控制系统所能抑制的只是被反馈环包围的前向通道上的扰动。
可见,测速发电机的励磁量发生变化时,系统无能为力。
6.答案:采用比例积分调节器的闭环调速系统是无静差调速系统。
积分控制可以使系统在无静差的情况下保持恒速运行,原因是积分调节器的输出包含了输入偏差量的全部历史。
可以实现无静差调速。
四、计算题:1.答案:开环系统的稳态速降:354.33r/min;满足调速要求所允许的稳态速降:8.33r/min;闭环系统的开环放大系数:41.542.答案:42.5N•M,3.41N•M3.答案:T=62.92N•M,n=920r/min,cosФ=0.784.答案:α=0。
时n0=2119r/min, α=30。
时n0=1824r/min,α=31.1。
电力拖动自动控制系统-运动控制系统课后参考答案第五六七章

第五章思考题5-1 对于恒转矩负载,为什么调压调速的调速范围不大电动机机械特性越软,调速范围越大吗答:对于恒转矩负载,普通笼型异步电动机降压调速时的稳定工作范围为0<S<S m 所以调速范围不大。
电动机机械特性越软,调速范围不变,因为S m 不变。
5-2 异步电动机变频调速时,为何要电压协调控制在整个调速范围内,保持电压恒定是否可行为何在基频以下时,采用恒压频比控制,而在基频以上保存电压恒定答:当异步电动机在基频以下运行时,如果磁通太弱,没有充分利用电动机的铁心,是一种浪费;如果磁通,又会使铁心饱和,从而导致过大的励磁电流,严重时还会因绕组过热而损坏电动机。
由此可见,最好是保持每极磁通量为额定值不变。
当频率从额定值向下调节时,必须同时降低E g 使14.44常值SgS N mN E N K f ϕ=⨯⨯=,即在基频以下应采用电动势频率比为恒值的控制方式。
然而,异步电动机绕组中的电动势是难以直接检测与控制的。
当电动势值较高时,可忽略定子电阻和漏感压降,而认为定子相电压s g U E ≈。
在整个调速范围内,保持电压恒定是不可行的。
在基频以上调速时,频率从额定值向上升高,受到电动机绝缘耐压和磁路饱和的限制,定子电压不能随之升高,最多只能保持额定电压不变,这将导致磁通与频率成反比地降低,使得异步电动机工作在弱磁状态。
5-3 异步电动机变频调速时,基频以下和基频以上分别属于恒功率还是恒转矩调速方式为什么所谓恒功率或恒转矩调速方式,是否指输出功率或转矩恒定若不是,那么恒功率或恒转矩调速究竟是指什么答:在基频以下,由于磁通恒定,允许输出转矩也恒定,属于“恒转矩调速”方式;在基频以上,转速升高时磁通减小,允许输出转矩也随之降低,输出功率基本不变,属于“近似的恒功率调速”方式。
5-4基频以下调速可以是恒压频比控制、恒定子磁通、恒气隙磁通和恒转子磁通的控制方式,从机械特性和系统实现两个方面分析与比较四种控制方法的优缺点。
电力拖动自动控制系统_课后答案
习题解答(供参考)习题二2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解:10000.02(100.98) 2.04(1)n n sn rpm D s ∆==⨯⨯=-系统允许的静态速降为2.04rpm 。
2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为0min 150min n r =,带额定负载时的速度降落15min N n r ∆=,且在不同转速下额定速降不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?解:1)调速范围 max min D n n =(均指额定负载情况下)max 0max 1500151485N n n n =-∆=-= min 0min 15015135N n n n =-∆=-= max min 148513511D n n ===2) 静差率 01515010%N s n n =∆==2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。
相控整流器内阻Rrec=0.022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
如果s=30%时,则系统的调速范围又为多少??解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R rpm ∆==⨯+= (1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-= [(1)]14300.3[115(10.3)] 5.33N D n S n s =∆-=⨯⨯-=2.5 某龙门刨床工作台采用V-M调速系统。
已知直流电动机60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2V•min/r,求:(1)当电流连续时,在额定负载下的转速降落N n ∆为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ∆又为多少? 解:(1)3050.180.2274.5/min N N n I R r ∆=⨯=⨯= (2) 0274.5(1000274.5)21.5%N N S n n =∆=+=(3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*8.8u U V =、比例调节器放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。