纯电动汽车计算技术的资料共32页文档
纯电动汽车关键技术
纯电动汽车关键技术一、电池技术电机是纯电动汽车的动力源,因此电机技术直接影响着车辆的动力性能、驾驶舒适度和效率。
目前常见的电机类型包括永磁同步电机、感应电机和混合式电机等。
永磁同步电机由于高效、轻量、体积小等优点,成为了纯电动汽车的主流驱动系统。
感应电机虽然成本低廉、结构简单,但效率较低、响应速度慢等问题限制着其在纯电动汽车上的应用。
而混合式电机则将永磁同步电机和感应电机相结合,兼具两者的优点,在效率和动力性能上都有较好的表现。
未来随着电机技术的进一步发展,高性能、轻量化、高整车集成度的电机将成为新的发展方向,以满足纯电动汽车对动力性能和效率的更高要求。
充电技术是纯电动汽车的关键基础设施之一,直接影响着车辆的使用便利性和充电效率。
目前主要的充电技术包括交流充电和直流快充。
交流充电在家庭、工作场所等地方应用广泛,充电桩的建设和运营已经较为成熟。
而直流快充则能够在短时间内完成电池充电,提高了车辆的使用便利性,但充电设施的建设和投资成本较高。
无线充电技术也成为了研究的热点之一,能够解决充电线缆的使用和管理问题,提高了充电的便利性和安全性。
未来充电技术的发展方向主要包括充电效率的提高、充电桩的智能化和网络化等,以满足纯电动汽车的日益增长的充电需求。
四、智能化技术智能化技术是纯电动汽车的重要发展方向之一,在驾驶辅助、车载娱乐、交互式控制等方面发挥着越来越重要的作用。
智能化技术通过传感器、控制器、人机交互等手段,不仅提高了车辆的驾驶安全性和舒适性,还提供了更多的功能和服务。
自动驾驶技术能够实时分析道路情况和车辆状态,提供相应的驾驶辅助,提高了行车的安全性和便利性。
车载娱乐系统、智能语音交互、车联网等技术也丰富了车辆的功能和用户体验。
未来随着人工智能、大数据等技术的不断发展,智能化技术将在纯电动汽车中得到更加广泛的应用。
五、轻量化技术轻量化技术是纯电动汽车提高能效和续航里程的重要途径之一,通过车身材料、结构设计、零部件轻量化等手段,降低了车辆的整体重量,提高了能源利用效率。
纯电动汽车计算技术

虫虫四人组制作 2004-10-29
亲近自然 感悟时尚
虫虫小吧有限责任公司创业计划书
1、电动机的参数匹配
电动机是纯电动汽车的唯一动力源,其性能与电动汽车 整车性能密切相关,因此,对电动机的选择及参数匹配是研 究设计纯电动汽车动力系统的关键之一。为了高性能地驱动 电动汽车,驱动电机在性能上须达到一定的要求,通常要求 驱动电机能够频繁起动/停车、加速/减速,转矩控制的动 态性能要求高;在低速或爬坡时,转矩要高,而在高速行驶 时,转矩要低;其次,驱动电机的的调速范围要宽,既要工 作在恒转矩区,又要运行在恒功率区,同时在整个调速范围
pmax max( pmax1, pmax2, pmax3 )
1-6
将整车参数代入上述公式并按照整车动力性要求,计算 得到电动机的峰值功率,计算过程如下: 整车通过改型为电动客车后,质量估算:
Mev =Mcon Mfc Macc Mgb +Mess Mmc Mpasgr 1-7
即,新车质量=原车整备质量-发动机质量-变速器质量- 发动机附件质量+电池质量+电机质量+乘员质量。估算电动机、
电池和乘客等质量后,计算得到 veh_mass。
虫虫四人组制作 2004-10-29
亲近自然 感悟时尚
虫虫小吧有限责任公司创业计划书
首先将不同的车速值代入式(1-1),得到最高车速与 电动机最大功率需求的关系曲线。再根据性能指标最高车
速,进而得到 Pmax1。
其次将不同的坡度值代入式(1-2),并假设车速 vi , 计算得到车辆最大爬坡度与电动机功率需求的关系曲线。
和效率一般。开关磁阻电机结构更为简单,效率、转矩惯量比
也较高,但由于力矩波动及噪声过大,在电动汽车上用得还不
纯电动汽车简介及设计计算
纯电动汽车简介及设计计算4.1 概述4.2 纯电动汽车传动系统参数设计4.3 纯电动汽车的续驶⾥程4.4 纯电动汽车电池管理系统4.1概述●纯电动汽车是以电池为储能单元,以电动机为驱动系统的车辆。
●纯电动汽车的特点是结构相对简单,⽣产⼯艺相对成熟。
缺点是充电速度慢,续驶⾥程短。
因此适合于⾏驶路线相对固定,有条件进⾏较长时间充电的车辆。
1.纯电动汽车分类●1).按⽤途分类●(1)纯电动轿车;●(2)电动货车;●(3)电动客车。
●2).按驱动形式分类●(1)直流电机驱动的电动汽车;●(2)交流电机驱动的电动汽车;●(3)双电机驱动的电动汽车;●(4)双绕组电机电动汽车;(5)电动轮电动汽车。
2.纯电动汽车组成与原理电动汽车主要由电⼒驱动系统、电源系统和辅助系统等三部分组成。
汽车⾏驶时,由蓄电池输出电能(电流)通过控制器驱动电动机运转,电动机输出的转矩经传动系统带动车轮前进或后退。
电动汽车续驶⾥程与蓄电池容量有关,蓄电池容量受诸多因素限制。
要提⾼⼀次充电续驶⾥程,必须尽可能地节省蓄电池的能量。
典型电动汽车组成框图2.纯电动汽车组成与原理●1).电⼒驱动系统电⼒驱动系统主要包括电⼦控制器、功率转换器、电动机、机械传动装置和车轮等。
它的功⽤是将存储在蓄电池中的电能⾼效地转化为车轮的动能,并能够在汽车减速制动时,将车轮的动能转化为电能充⼊蓄电池。
2.纯电动汽车组成与原理●包括电动机驱动器、控制器及各种传感器,其中最关键的是电动机逆变器。
●电动机不同,控制器也有所不同。
控制器将蓄电池直流电逆变成交流电后驱动交流驱动电动机,电动机输出的转矩经传动系统驱动车轮,使电动汽车⾏驶。
●有关电动机的相关内容已在第3章中介绍。
2.纯电动汽车组成与原理●2).电源系统●包括电源、能量管理系统和充电机等。
它的功⽤是向电动机提供驱动电能、监测电源使⽤情况以及控制充电机向蓄电池充电。
●纯电动汽车的常⽤电源有铅酸电池、镍镉电池、镍氢电池、锂离⼦电池等。
电动汽车整车性能参数计算
1. 2载荷或成员人数
电动汽车目前主要功能是承载乘员
乘员的重量不固定。 乘员质量依据GB/T12428标准核算。
A级和I级客车 65kg/人 其他客车 78kg/人
驾驶员、乘务员等乘务人员 75kg/人 其他车辆 65kg/人
乘员质量=乘员数×每个乘员质量
电动汽车技术与原理 第 5 页
装有变速器,效率较低,0.92~0.95
轮毂电机驱动,效率要高,95~0.98
电动汽车技术与原理 第 12 页
3. 1汽车的驱动力
3. 车轮的半径
r 自由半径 —无载
静力半径 滚动半径
rs
rr
—静载 —动载
rr
=
s
2nw
s——转动n圈,实际车轮滚动距离。
nw——车轮滚动圈数。
r r r 一般不计差别,统称车轮半径r,即
电动汽车技术与原理 第 7 页
返回
3影响电动汽车行驶性能的参数
3. 1汽车的驱动力 3. 2汽车的行驶阻力
电动汽车技术与原理 第 8 页
行驶方程式
运动状况
力
驱 动 力 Ft
行驶阻力ΣF
平衡关系
u
max
பைடு நூலகம் a(t)
Ft
=
F
i max
电动汽车技术与原理 第 9 页
滚动阻力 空气阻力 加速阻力 坡度阻力
i = h = tana s
Fi = G sin Gtg = Gi
高速公路在平原及微丘陵地段最大纵坡不大于3%,山区重丘陵路段不大 于5%。
一级汽车专用道路在平原及微丘陵地段最大纵坡不大于4%,山区重丘陵 路段不大于6%。
纯电动汽车计算技术介绍

高效能与低能耗
高效能
纯电动汽车计算技术正致力于提高能源利用效率,通过优化电机、电池和电力 电子系统的控制策略,实现更快的加速和更长的续航里程。这有助于提升用户 体验,满足更广泛的应用需求。
低能耗
降低能耗是纯电动汽车计算技术的另一重要趋势。通过轻量化设计、能量回收 和热管理等技术手段,降低车辆运行过程中的能量消耗,延长续航里程,减少 对充电基础设施的依赖。
车辆能量管理
根据车辆行驶状态和驾驶员需求,合理分配电机和电池的能量,以 提高车辆性能和续航里程。
安全保障
通过多种传感器和算法,实现车辆的自动紧急制动、车道偏离预警、 盲点监测等功能,提高车辆主动安全性能。
03
纯电动汽车计算技术面临 的挑战
数据安全与隐私保护
总结词
数据安全与隐私保护是纯电动汽车计算技术面临的重要挑战之一。
互联互通与共享经济
互联互通
纯电动汽车计算技术正推动车辆与基础设施、其他车辆以及智能交通系统的互联互通。 通过V2X通信技术,实现车与车、车与路之间的信息交互,提高交通安全性,优化交通
流量。
共享经济
纯电动汽车计算技术也在推动共享经济的发展。通过智能化的车辆调度和路径规划,实 现更高效的共享出行服务。这有助于减少城市交通拥堵和碳排放,促进可持续发展。
动力系统优化
通过控制电机和传动系统,提 高车辆的动力性能和燃油经济 性。
智能驾驶辅助系统
用于实现自动驾驶、车道偏离 预警、碰撞预警等功能。
02
纯电动汽车计算技术原理
电池管理系统
电池状态监测
实时监测电池的电量、电 压、电流和温度等参数, 确保电池安全、高效地工 作。
电池能量管理
根据车辆行驶状态和电池 状态,合理分配电池能量, 以延长电池寿命和续航里 程。
纯电动汽车动力性计算公式(可编辑修改word版)
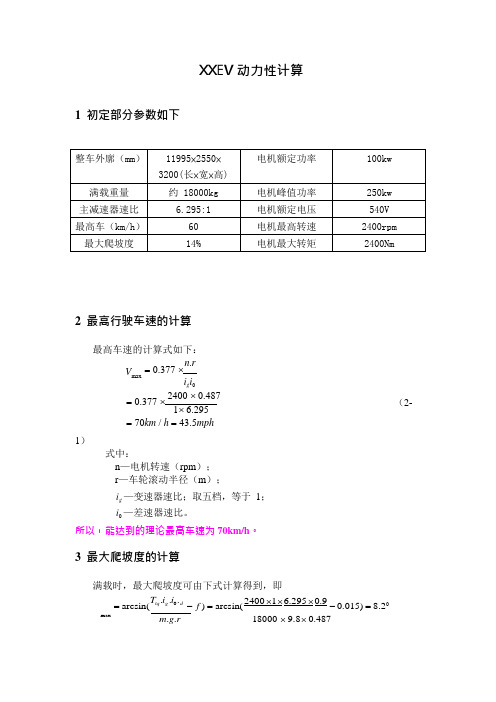
XXEV 动力性计算1初定部分参数如下整车外廓(mm)11995×2550×3200(长×宽×高)电机额定功率100kw 满载重量约 18000kg 电机峰值功率250kw 主减速器速比 6.295:1 电机额定电压540V 最高车(km/h)60 电机最高转速2400rpm 最大爬坡度14% 电机最大转矩2400Nm2最高行驶车速的计算最高车速的计算式如下:V max = 0.377 ⨯n.rigi= 0.377 ⨯2400 ⨯ 0.487 1⨯ 6.295= 70km / h = 43.5mph1)式中:n—电机转速(rpm);r—车轮滚动半径(m);ig—变速器速比;取五档,等于1;i 0 —差速器速比。
(2-所以,能达到的理论最高车速为70km/h。
3最大爬坡度的计算满载时,最大爬坡度可由下式计算得到,即=arcsin(T tq.i g.i0.d-f)=arcsin(2400⨯1⨯6.295⨯0.9-0.015)=8.20 max m.g.r18000 ⨯ 9.8⨯ 0.487所以满载时最大爬坡度为 t a n (max)*100%=14.4%>14%,满足规定要求。
4 电机功率的选型纯电动汽车的功率全部由电机来提供,所以电机功率的选择须满足汽车的最高车速、最大爬坡度等动力性能的要求。
4.1 以最高设计车速确定电机额定功率当汽车以最高车速V max 匀速行驶时,电机所需提供的功率(kw )计算式为:1C .A .V 2 P n = (m .g . f 3600 + d max ).V 21.15max(2-1)式中:η—整车动力传动系统效率(包括主减速器和驱动电机及控制器的工作效 率),取 0.86;m —汽车满载质量,取 18000kg ; g —重力加速度,取 9.8m/s 2; f —滚动阻力系数,取 0.016; C d —空气阻力系数,取 0.6;A —电动汽车的迎风面积,取 2.550× 3.200=8.16m 2(原车宽*车身高);V max —最高车速,取 70km/h 。
纯电动汽车学习入门(十九)——纯电动汽车三电技术参数

文/北京 李玉茂
纯电动汽车学习入门(十九)
——纯电动汽车三电技术参数
纯电动乘用汽车按功能分类,有基本型乘用车、SUV车、MPV车、跨界车4个类型。
按长度、轴距划分级别,有微型车、小型车、紧凑型车、中型车、中大型车、大型车(也称全尺寸)6个级别。
目前我国约有200家电动汽车生产厂商,汽车销售市场中,在售的国内外品牌约有100多个型号纯电动汽车。
下面分级别介绍部分热销纯电动汽车的主要技术参数,首先
熟悉一下表格中3个术语:NEDC标准、CLTC标准、换电模式。
NEDC标准:全称是“新欧洲续航测试标准”,由欧洲制定,主要模拟的环境有市区和郊区,在试验台架上以城市郊区4:1的比例测试续航。
C L T C 标准:全称是“中国轻型汽车行驶工况”,由中国制定,专门针对国内用车环境开发的乘用车循环测试工
况,偏向于频繁加减速,符合走走停停的路况情况。
换电模式:集中型充电站对电池集中存储、集中充电、统一配送,电池配送站提供纯电动汽车电池更换服务;或者集中型充电站兼有电池更换服务,换电的过程一般需要3~5min。
我国已经出台了一系列换电行业鼓励和支持政策,对推动我国换电行业发展起到了重要作用。
一、
微型车
(接2023年第5期)
二、
小型车
三、
紧凑型车
四、
中型车
五、中大型车2021.12.62022.5.92021.9.102022.4.152022.4.2 2111
六、
大型车
(未完待续)。
新能源汽车技术第3章2电动汽车用电动机ppt课件
3.4 异步电动机
异步电动机又称感应电动机,是由气隙旋转磁 场与转子绕组感应电流相互作用产生电磁转矩,从 而实现电能量转换为机械能量的一种交流电动机。
异步电动机的种类很多。最常见的方法是按转 子结构和定子绕组相数分类。
按照转子结构来分,有笼型异步电动机和绕线 型异步电动机;按照定子绕组相数来分,有单相异 步电动机、两相异步电动机和三相异步电动机。
新能源汽车技术 第 1 页
HARBIN INSTITUTE OF TECHNOLOGY
1.异步电动机的结构与特点
1).异步电动机的结构 ➢ 异步电动机主要由静止的定子和旋转的转子两大部
分组成。 (1)定子 异步电动机的定子由定子铁心、定子绕组和机座构 成。 (2)转子。异步电动机的转子由转子铁心、转子绕组 和转轴组成。
新能源汽车技术 第 2 页
HARBIN INSTITUTE OF TECHNOLOGY
1.异步电动机的结构与特点
三相异步电动机的典型结构
新能源汽车技术 第 3 页
HARBIN INSTITUTE OF TECHNOLOGY
1.异步电动机的结构与特点
2).异步电动机的特点
➢ 转子绕组不需与其他电源相连,其定子电流直接取自 交流电力系统;结构简单,制造、使用、维护方便, 运行可靠性高,重量轻,成本低。
新能源汽车技术 第 26 页
HARBIN INSTITUTE OF TECHNOLOGY
5.异步电动机的控制
2). 异步电动机直接转矩控制 直接转矩控制是将电动机输出转矩作为直接控
制对象,通过控制定子磁场向量控制电动机转速。 通过控制PWM型逆变器的导通和切换方式,控制