适用于低气压下的风速、风向标定系统的生产技术
大气层中的风向和风速测量方法

1.引言大气层中的风向和风速测量对于许多领域都非常重要,例如气象、航空、海洋、环境保护等。
因此,研究和发展具有高精度和高可靠性的风向和风速测量方法具有重要意义。
2.风向测量方法2.1.风向标法风向标法是最简单和最直观的风向测量方法。
它通过观察风向标上的指针或其他标志物的方向来确定风向。
这种方法适用于低空风向测量和风向变化缓慢的情况。
2.2.风袋法风袋法是一种基于气体动力学原理的风向测量方法。
它利用风袋在风中的变形来测量风向。
风袋通常由两个或更多的薄膜构成,它们之间充满了气体。
当风吹过风袋时,其中一个膜会向风口方向凸起,另一个则凹陷。
这种变形可以通过测量两个膜的形态来确定风向。
2.3.旋转杆法旋转杆法是一种基于摩擦力原理的风向测量方法。
它利用一个固定在地面上的杆,杆顶安装有一个旋转的指针或标志物。
当风吹过杆时,风力会使得指针或标志物旋转,其方向指向风的来向,从而确定风向。
3.风速测量方法3.1.热线法热线法是一种基于热传导原理的风速测量方法。
它利用一个细丝电阻作为热线,将其加热到一定温度。
当气体通过热线时,它会带走部分热量,从而降低热线温度。
通过测量热线的电阻变化来计算气体的流速,进而确定风速。
3.2.声波法声波法是一种基于声学原理的风速测量方法。
它利用声波在气体中的传播速度和方向与气体运动速度和方向之间的关系来计算风速。
这种方法需要使用专门的声速计来测量声波的传播速度,因此适用于高精度的风速测量。
3.3.激光多普勒测速法激光多普勒测速法是一种基于激光多普勒效应的风速测量方法。
它利用激光束对气体中的微粒进行散射,并通过测量散射光的频率变化来计算气体的速度,从而确定风速。
这种方法具有高精度和非接触性,适用于远距离和高速风速测量。
4.结论风向和风速是大气层中最基本的气象要素之一,对于许多领域都具有重要意义。
本文介绍了几种常见的风向和风速测量方法,包括风向标法、风袋法、旋转杆法、热线法、声波法和激光多普勒测速法。
一种风速风向传感器现场标定系统及方法[发明专利]
![一种风速风向传感器现场标定系统及方法[发明专利]](https://img.taocdn.com/s3/m/57f5e2e652ea551811a687d1.png)
专利名称:一种风速风向传感器现场标定系统及方法专利类型:发明专利
发明人:梁习锋,熊小慧,周伟,王中钢,孙博,张健,孙保民申请号:CN201610572851.2
申请日:20160720
公开号:CN106226557A
公开日:
20161214
专利内容由知识产权出版社提供
摘要:本发明公开了一种风速风向传感器现场标定系统及方法,所述装置包括小型车载式开口直流风洞、风洞驱动装置、风洞控制系统、传感器动态标定系统和检测车;小型车载式开口直流风洞主要包含开口试验段、收缩段、稳定段、风扇段、大角度扩散段和常规扩散段;小型车载式开口直流风洞、风洞驱动装置、风洞控制系统、传感器动态标定系统都装在检测车上;所述方法是将待测风速风向传感器安装在开口试验段处,分别进行风速、风向的测量,然后将获得风速、风向的平均值与实际测量风速、风向值作比较,判定风速风向传感器是否符合标准要求;本发明的有益效果是:使风速风向传感器的标定变得便捷快速有效,在现场就能够达到室内风洞标定的精度。
申请人:中南大学
地址:410083 湖南省长沙市岳麓区麓山南路932号
国籍:CN
更多信息请下载全文后查看。
机械式风速风向仪原理
机械式风速风向仪原理机械式风速风向仪是一种用来测量风速和风向的仪器,通过测量风的压力来确定风速,以及通过转动风向标来确定风向。
它的工作原理基于一些基本的物理原理和机械原理。
我们来看一下测量风速的原理。
机械式风速风向仪通常由一个风叶和一个风速传感器组成。
风叶被放置在一个受风的位置上,当风吹过时,风叶会受到风的作用力,从而产生一个力矩。
这个力矩会通过一个传感器被感知到,并转化为一个电信号。
这个电信号的大小与风速成正比。
风速传感器通常采用的是一个称为热线式传感器的装置。
它由一个细丝电阻和一个恒温器组成。
当电流通过细丝电阻时,细丝电阻会发热,恒温器会自动调节电流的大小,使得细丝电阻的温度保持不变。
当风吹过细丝电阻时,风会带走细丝电阻的热量,导致细丝电阻的温度下降。
根据细丝电阻的温度变化,我们就可以得到风速的大小。
接下来,我们来看一下测量风向的原理。
机械式风速风向仪通常采用的是一个风向标来测量风向。
风向标由一个带有指针的轴和一系列指向不同方向的箭头组成。
当风吹过风向标时,风的方向会使得指针指向相应的箭头,从而确定风的方向。
风向标的转动是通过一个机械装置来实现的,这个装置通常由一个风向传感器和一个转动装置组成。
风向传感器可以感知风的方向,并将其转化为一个电信号。
转动装置根据这个电信号的大小和方向来控制风向标的转动,使其指向相应的箭头。
总结一下,机械式风速风向仪的工作原理可以概括为:通过测量风叶受到的风的作用力来确定风速,并通过转动风向标来确定风向。
这个过程涉及到一些基本的物理原理和机械原理,如力的作用、电信号转化和机械转动等。
机械式风速风向仪在气象观测、航空航天、环境监测等领域有着广泛的应用。
它可以提供准确的风速和风向信息,帮助人们更好地了解天气状况,进行科学研究和生产活动。
同时,由于其结构简单、可靠性高,机械式风速风向仪也被广泛应用于户外环境监测和个人气象观测等场景。
随着科技的不断发展,机械式风速风向仪也在不断创新和改进。
国家开放大学《化工仪表及自动化》形考任务1-4参考答案
国家开放大学《化工仪表及自动化》形考任务1-4参考答案形考任务11.控制系统的反馈信号使得原来信号增强的叫作()。
A.负反馈B.正反馈C.前馈D.回馈2.下面()符号代表调节阀。
A.FVB.FTC.FYD.FE3.在自动控制系统中,随动系统把()的变化作为系统的输入信号。
A.测量值B.给定值C.偏差值D.干扰值4.过渡过程品质指标中,余差表示()。
A.新稳态值与给定值之差B.测量值与给定值之差C.调节参数与被调参数之差D.超调量与给定值之差5.生产过程自动化的核心是()装置。
A.自动检测B.自动保护C.自动执行D.自动调节6.下列压力计中,能测绝对压力且精度最高的是()。
A.弹簧管压力计B.砝码、活塞式压力计C.电容式压力计D.电阻式压力计7.压力表在现场的安装需()。
A.水平B.倾斜C.垂直D.任意角度8.测量氨气的压力表,其弹簧管应用()材料。
A.不锈钢B.钢C.铜D.铁9.霍尔式压力传感器利用霍尔元件将压力所引起的弹性元件()转换为霍尔电势实现压力测量。
A.变形B.弹力C.电势D.位移10.活塞式压力计上的砝码标的是()。
A.质量B.压力值C.千克D.公斤11.仪表的精度级别是指仪表的()。
A.基本误差B.最大误差C.最大引用误差D.基本误差和最大允许值12.若一块压力表量程为0~16MPa,要求测量值的绝对误差小于±0.2MPa,选用()级的仪表。
A.1.0级B.1.5级C.2.0级D.0.5级13.评定仪表品质的主要质量指标是()A.精度B.基本误差C.动态误差D.系统误差14.计算错误所造成的误差是()。
A.随机误差B.系统误差C.疏忽误差D.附加误差15.由于仪表内部元件老化过程引起的误差称为()。
A.疏忽误差B.缓变误差C.随机误差D.系统误差16.自动控制系统方块图由()组成。
A.传递方块B.信号线C.比较点D.分支点17.下列过程中()属于典型过渡过程的基本形式。
A.发散振荡过程B.等幅振荡过程C.随机振荡过程D.非周期衰减过程18.按误差产生的原因以及误差的性质,误差分为()。
风力风向计的制作方法

风力风向计的制作方法
风力风向计是一种用来测量风速和风向的仪器,它可以帮助我们更好地了解天气情况,为农业、航空、航海等领域提供重要的参考数据。
下面,我们来介绍一下风力风向计的制作方法。
我们需要准备一些材料,包括一个塑料瓶、一根细木棒、一张纸片、一些小石子、一些彩色纸片和一些胶水。
接下来,我们可以按照以下步骤进行制作:
1. 将塑料瓶切成两半,将上半部分倒置放在下半部分上,形成一个漏斗状的容器。
2. 在容器的侧面打一个小孔,用细木棒穿过孔洞,使其垂直于容器底部。
3. 在纸片上画出一个箭头形状,然后将其剪下来,用胶水粘在细木棒的顶端,成为风向标。
4. 在容器的底部放入一些小石子,以增加重量,使其更加稳定。
5. 在彩色纸片上画出一些不同颜色的标记,分别代表不同的风速等级。
6. 将彩色纸片粘在容器的侧面,与风向标相对应的位置上。
完成以上步骤后,我们的风力风向计就制作完成了。
当风吹过容器
时,细木棒上的风向标会指示出风的方向,而彩色纸片上的标记则可以帮助我们判断风速的大小。
通过不断观察和记录,我们可以更加准确地了解当地的气象情况,为生产和生活提供更好的参考。
风力风向计是一种简单实用的气象仪器,制作方法也非常简单,只需要准备一些常见的材料和工具,就可以轻松制作出来。
希望大家可以尝试一下,体验一下制作的乐趣,并且在实际应用中发挥出更大的作用。
国产防爆风速风向仪参数

国产防爆风速风向仪参数
产品名称:星云风速风向仪
产品特点:
- 具备防爆功能,适用于危险环境中的风速和风向测量。
- 采用国产先进技术,具有高精度和稳定性。
- 测量范围广,可满足不同环境下的需求。
- 操作简单,具有直观的显示屏,可实时显示风速和风向数据。
主要参数:
- 风速测量范围:0.3 m/s - 30 m/s
- 风速测量精度:±0.1 m/s
- 风速测量单位:m/s、km/h、mph、ft/min、ft/s、Knots
- 风向测量范围:0° - 360°
- 风向测量精度:±3°
- 风向测量方式:机械方位传感器
- 显示屏:LCD液晶显示屏,显示风速、风向、单位等信息
- 供电:内置可充电锂电池,持续工作时间约8小时
- 通信接口:RS485接口,可连接计算机或其他设备进行数据传输和记录
- 防爆等级:符合防爆标准Ex d II CT6,适用于危险环境
- 工作温度:-20℃ - 60℃
- 尺寸:150mm × 100mm × 50mm
- 重量:约500g
备注:由于这是一份虚拟制作的参数参考,所以产品名称和具体技术参数仅供参考,并不代表真实存在的产品。
FY-Q1自动气象站
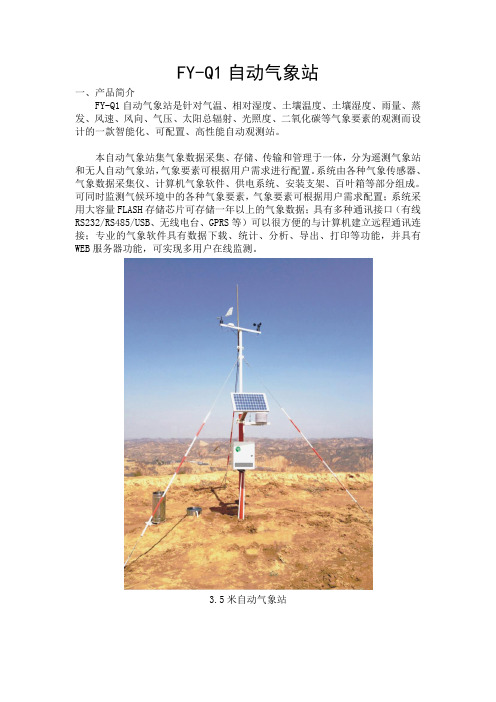
FY-Q1自动气象站一、产品简介FY-Q1自动气象站是针对气温、相对湿度、土壤温度、土壤湿度、雨量、蒸发、风速、风向、气压、太阳总辐射、光照度、二氧化碳等气象要素的观测而设计的一款智能化、可配置、高性能自动观测站。
本自动气象站集气象数据采集、存储、传输和管理于一体,分为遥测气象站和无人自动气象站,气象要素可根据用户需求进行配置。
系统由各种气象传感器、气象数据采集仪、计算机气象软件、供电系统、安装支架、百叶箱等部分组成。
可同时监测气候环境中的各种气象要素,气象要素可根据用户需求配置;系统采用大容量FLASH存储芯片可存储一年以上的气象数据;具有多种通讯接口(有线RS232/RS485/USB、无线电台、GPRS等)可以很方便的与计算机建立远程通讯连接;专业的气象软件具有数据下载、统计、分析、导出、打印等功能,并具有WEB服务器功能,可实现多用户在线监测。
3.5米自动气象站10米自动气象站二、应用领域FY-Q1自动气象站可广泛应用于气象、环保、机场、农林、水文、工农业生产、旅游、城市环境监测、仓储、科学研究等领域。
三、功能特点●可观测风速、风向、温度、湿度、气压、降雨量、辐射、照度、蒸发等多种气象要素,气象观测要素可根据用于需求进行配置;●多种供电方式。
具有交流、直流以及太阳能供电系统可供选择;●多种通讯方式。
RS232、RS485、RJ45、GPRS、无线电台等供选择;●支持MODBUS通讯,可开放通讯协议;●支持气象短信功能;●支持U盘存储功能,实现数据海量存储;●可配置户外LED气象显示屏;●低功耗、高精度、高可靠性,完全实现野外无人值守;●大容量数据存储器,可存储一年以上的气象数据;●先进完善的多种防雷保护设计,能有效的防雷电干扰;●操作简便、易于安装维护和远、近程监控;●防腐工艺处理,适用于各种恶劣环境。
工作环境:-50~+50℃、0~100%RH ;可靠性:平均无故障时间>6000小时防护等级:IP65,防雷击、防电磁干扰、防盐雾腐;采集器:嵌入式操作系统采集器,多通道数据采集;数据存储:4M FLASH 数据存储器,可扩展U盘存储器;走时精度:实时时钟,准确度优于20秒/月系统供电:太阳能/交流/直流供电模式;系统功耗:依据配置标定;采集功能:采样存储可远程升级;通讯方式:GPRS/CDMA/ 卫星远传中心站及现场直连;数据输出:气象规范/用户定制;。
浅析测风塔高度及传感器配置原则

浅析测风塔高度及传感器配置原则[摘要]:随着国家“双碳”目标的确立,新能源发电业务不断壮大,国内风电产业迎来了高速发展,而风力发电企业在项目建设不同时期均非常依赖测风塔提供的风能资源实际情况,来为风电功率预测及电网调度提供决策支持,但相关规程规范对测风塔高度及其数据测量要求不尽相同,因此,合理设计测风塔高度及相关传感器配置成为亟待讨论的问题。
本文通过介绍相关规程规范的要求,结合部分政策性文件,提出适用于项目验收的测风塔高度及传感器配置原则。
[关键词]:风力发电;测风塔;传感器;设计0 引言双碳背景下,新能源企业尤其是风电企业的竞争日益加剧,尤其在弃风限电的影响中,更加需要精细化的建设、运维管理。
风电场生命周期,包括前期风能资源的评估与分析、电场选址、机组选型与排布、建设期、运维期。
其中,对风能资源的准确评估,直接影响风电场的发电效益,是风电项目成功与否的关键。
测风塔是作为用于风资源的数据采集的需要而新兴的一种塔型,测风塔架设在目标风场内,目的是为了分析该风场内风能资源的实际情况。
1 测风塔数量与高度要求《风电场风能资源测量方法》(GB/T 18709-2002)要求,风场在一处安装测风塔时,其高度不应低于拟安装的风力发电机组的轮毂中心高度。
风场多处安装测风塔时,其高度可按10m的整数倍选择,但至少有一处测风塔的高度不应低于拟安装的风力发电机组的轮毂中心高度。
《风电功率预测系统测风塔数据测量技术要求》(NB/T 31079-2016)要求,测风塔高度应为10m整数倍,且高于风电场风机轮毂高度10m以上。
2测风传感器配置要求《风电场风能资源测量方法》(GB/T 18709-2002)要求,测风仪包括风速传感器、风向传感器和数据采集器三部分。
只在一处安装测风塔时,测风塔上应安装三层风速、风向传感器,其中两层应选择在10m高度和拟安装的风力发电机组的轮毂中心高度处,另一层可选择10m的整数倍高度安装。
风场安装二处及以上测风塔时,应有一套风速、风向传感器安装在10m高度处,另一套风速、风向传感器应固定在拟安装的风力发电机组的轮毂中心高度处,其余的风速、风向传感器可固定在测风塔10m的整数倍高度处。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本技术提出了一种适用于火星等低气压下的风速/风向传感器标定系统,其包括待标定风速传感器、真空环模系统、可调速转台系统、悬臂、步进电机、步进电机控制器等,通过一定速度的旋转实现传感器相对气体的运动,步进电机及联轴器控制传感器角度以实现风向的模拟,以实现二维风向的模拟。
本技术基于现有设备实现了对双丝式热线风速传感器的标定,结构简单,可靠性高,有效提高了试验效率。
技术要求1.适用于低气压下的风速/风向标定系统,包括真空环境模拟设备、热沉、转台、压力控制系统、悬臂、滑环、转台控制系统、热式风速/风向传感器支撑杆、风速传感器电桥组、数据采集模块、步进电机、联轴器、支撑及轴承以及步进电机驱动器,其中,真空环境模拟设备内设置有转台和热沉,悬臂中间通过电刷滑环支撑在转台上,用于支撑待标定的热式风速/风向传感器的支撑杆经联轴器连接到步进电机上,步进电机通过电刷滑环与真空环境模拟设备外的步进电机驱动器电连接进行驱动,电刷滑环通过风速传感器电桥组与数据采集模块电连接,转台由真空环境模拟设备外的转台控制系统进行控制,转台控制系统、步进电机驱动器和数据采集系统分别与控制器电连接并由其控制,支撑杆底部通过支撑及轴承支撑在悬臂上;在标定试验中,首先确定所需要的标定的传感器线速度,根据传感器距转台中心的距离,计算标定试验所需的转台角速度,通过转台的定速旋转模拟待标定传感器与气体间的相对运动,即传感器的风速数据,在每个风速的标定过程中,通过调整步进电机的姿态,将传感器旋转至不同角度,模拟不同的风向,通过转台对不同风速、步进电机对不同风向的模拟,实现风速传感器适用范围内定点风速、风向的标定,所有传感器、步进电机的线缆通过电刷滑环导出,并在电脑端进行记录。
2.如权利要求1所述的风速/风向标定系统,其中,待标定的风速传感器包括但不限于恒温双丝型风速/风向传感器,三丝型传感器、多片式热膜风速传感器,恒热流式传感器。
3.如权利要求1所述的风速/风向标定系统,其中,转台上安装悬臂的长度为1m~1.5左右,通过调整转台的转速,实现0~30m/s左右的风速模拟。
4.如权利要求1所述的风速/风向标定系统,其中,转台上安装有电刷滑环,电刷滑环具有不少于8通道的电信号传输能力。
5.如权利要求1所述的风速/风向标定系统,其中,真空环模设备具有3m以上的试验段直径。
6.如权利要求1所述的风速/风向标定系统,其中,热沉设置在圆筒形的真空环模设备的筒形周边,以维持真空环模设备内的温度。
7.如权利要求1-6任一项所述的风速/风向标定系统,其中,热沉为调温热沉。
技术说明书适用于低气压下的风速、风向标定系统技术领域本技术属于航天器、航空器地面试验技术领域,具体涉及到一种在地面模拟低气压风速环境时,通过旋转方式实现在低气压下热式风速传感器的风速、风向标定的系统。
背景技术随着我国航天任务的多样化和成熟化,火星等其他地外行星的探测已经逐步开展,为了达到对着陆器、巡视器等星表航天器的全面验证及模型修正等目的,需要对星表环境进行温度、压力、风速的复合模拟,除常见的压力、温度环境外,一般还需要对风速进行模拟预测量。
此外,平流层飞艇等航空器亦提出了类似的需求,这就需要在低气压下通过传感器对风速、风向进行精确的测量。
目前常见风速传感器依据原理可分为热式、超声波式、皮托管式、机械式、激光粒子测速等方式,在地面巡视器热试验中,受限于测量点数、传感器大小等限制,使用热式风速仪进行测量具有较大优势。
由于热式风速传感器的原理主要是通过对敏感头加热,在平衡状态通过敏感头温度、散失热量(加热热量)即可精确计算来流空气温度,其原理决定了压力、流体温度变化较大时,其输出亦会变化,需要对温度、压力、风速传感器输出进行精确的测量,需要在不同的温度、压力、风速环境下对风速传感器进行标定、测试,获得不同温度、压力环境下传感器输出到风速的函数。
目前NASA、ESA、JAXA等机构均开展了风速传感器在低气压下使用的标定研究,其主要使用低气压风洞,或在热真空容器中搭建风道,使用引射的方式进行标定,其系统较为复杂;清华大学、北京航空航天大学等高校亦曾开展低气压下的风速标定研究,但主要针对于航空领域,压力一般在10000Pa,温度一般在室温左右,缺乏对火星环境(700Pa,-120~30℃左右)的模拟能力。
此外,在风向模拟方面,由于目前低气压下的风速测量主要为单丝热线风速仪及热球风速仪,对于风速的模拟需求不大,故现有低气压下的热式风速仪标定系统只具有风速的标定能力,缺乏对风向的模拟能力。
因此,设计和技术一种可在不同压力、气体温度下对热式风速仪风速、风向进行标定的设备具有积极的现实意义。
技术内容本技术要解决的技术问题是在低气压、低温条件下提供一个稳定、均匀的风速场,为热式风速传感器的风速、风向标定提供支撑,同时解决风速传感器信号在电动转台上的变送、传输问题,满足未来火星探测器、平流层飞艇等测试、试验用风速传感器的标定、测试问题,并兼具一定的扩展能力。
为解决上述问题,本技术采用的技术方案如下:适用于低气压下的风速/风向标定系统,包括真空环境模拟设备、热沉、转台、压力控制系统、悬臂、滑环、转台控制系统、热式风速/风向传感器支撑杆、风速传感器电桥组、数据采集模块、步进电机、联轴器、支撑及轴承以及步进电机驱动器,其中,真空环境模拟设备内设置有转台和热沉,悬臂中间通过电刷滑环支撑在转台上,用于支撑待标定的热式风速/风向传感器的支撑杆经联轴器连接到步进电机上,步进电机通过电刷滑环与真空环境模拟设备外的步进电机驱动器电连接进行驱动,电刷滑环通过风速传感器电桥组与数据采集模块电连接,转台由真空环境模拟设备外的转台控制系统进行控制,转台控制系统、步进电机驱动器和数据采集系统分别与控制器电连接并由其控制,支撑杆底部通过支撑及轴承支撑在悬臂上。
在标定试验中,首先确定所需要的标定的传感器线速度,根据传感器距转台中心的距离,计算标定试验所需的转台角速度,通过转台的定速旋转模拟传感器与气体间的相对运动,即传感器的风速数据,在每个风速的标定过程中,通过调整步进电机的姿态,可将传感器旋转至不同角度,模拟不同的风向,通过转台对不同风速、步进电机对不同风向的模拟,可实现风速传感器适用范围内定点风速、风向的标定。
所有传感器、步进电机的线缆通过电刷滑环导出,并在电脑端进行记录。
其中,待标定的风速传感器包括但不限于恒温双丝型风速/风向传感器,三丝型传感器、多片式热膜风速传感器,恒热流式传感器。
其中,转台上安装悬臂的长度为1m~1.5左右,通过调整转台的转速,实现0~30m/s左右的风速模拟。
其中,转台上安装有电刷滑环,电刷滑环具有不少于8通道的电信号传输能力。
其中,真空环模设备具有3m以上的试验段直径。
其中,热沉设置在圆筒形的真空环模设备的筒形周边,以维持真空环模设备内的温度。
其中,热沉为调温热沉,本技术的适用于低气压下的风速/风向标定系统基于对现有热真空容器的扩展,相对于传统低气压风洞式标定方案具有成本低、实施便捷等特点,同时兼具了风向模拟能力,解决了在低气压、不同温度下稳定标定风速、风向的要求,满足了相关型号的需求。
附图说明图1是本技术的适用于低气压下的风速/风向标定系统图;图中101为具有热沉系统的真空环模设备(或热真空容器),102为调温热沉,103为压力控制系统。
201为容器内的转台,202为安装于转台上的悬臂,203为安装于转台上的电刷滑环,204为转台控制系统,205为控制器。
301为待标定的热式风速/风向传感器,302为传感器的支撑杆,303为风速传感器电桥组,304为数据采集模块,401为步进电机,402为联轴器,403为支撑及轴承,404为步进电机驱动器;图2为本技术的适用于低气压下的风速/风向标定系统的电路连接图;图中301为待标定的风速/风向传感器,302为传感器支撑杆,401为步进电机,402为联轴器,203为电刷滑环,303a、303b分别为双丝传感器的两套电桥系统,304为数据采集模块,404为步进电机控制器,205为控制器,501a,501b,501c为四芯电缆,503为气密电连接器,504为容器外电连接器,505为电连接器、506为法兰;304a,304b为电桥,502a、502b、502c为四芯电缆,404为步进电机驱动器;510a、510b为四芯电缆,204为转台控制系统。
303a、303b为电桥,507为电缆,304为数据采集模块,509为线缆,205为控制器,404为步进电机驱动器,508为线缆,204为转台控制系统,511为电缆;图3为标定各个所需温度、压力下的传感器输出结果。
具体实施方式以下参照附图对本技术的适用于火星等极低气压下的风速传感器标定系统进行详细说明,但该描述仅仅示例性的,并不旨在对本技术的保护范围进行任何限制。
图1是本技术的适用于低气压下的风速/风向标定系统图,包括真空环境模拟设备101、热沉102、转台201、压力控制系统103、悬臂202、电刷滑环203、转台控制系统204、热式风速/风向传感器支撑杆302、风速传感器电桥组303、数据采集模块304、步进电机401、联轴器402、支撑及轴承403以及步进电机驱动器404,其中,真空环境模拟设备101内设置有转台201和调温热沉102,悬臂202中间通过电刷滑环203支撑在转台201上,用于支撑待标定的热式风速/风向传感器的支撑杆302经联轴器402连接到步进电机401上,步进电机401通过电刷滑环203与真空环境模拟设备101外的步进电机驱动器404电连接进行驱动,电刷滑环203通过风速传感器电桥组303与数据采集模块304电连接,转台201由真空环境模拟设备外的转台控制系统204进行控制,转台控制系统204、步进电机驱动器404和数据采集系统304分别与控制器205电连接并由其控制,支撑杆302底部通过支撑及轴承403支撑在悬臂202上,在标定试验中,首先确定所需要的标定的传感器线速度,根据传感器距转台中心的距离,计算标定试验所需的转台角速度,通过转台的定速旋转模拟传感器与气体间的相对运动,即传感器的风速数据。
例如,通过2m长悬臂进行标定实验,测得风速、风向传感器探头301距离转台旋转中心距离为1.1m,若需要标定的风速数据为0-20m/s,间隔为0.5m/s,则可由角速度ω=v/l公式分别计算出每个标定点的转台角速度,在对每个风速标定点的标定中,为了同时对风向数据进行标定,通过调整步进电机的姿态,可将传感器旋转至不同角度,模拟不同的风向,可按照如图3的顺序进行标定。
通过转台对不同风速、步进电机对不同风向的模拟,可实现风速传感器适用范围内定点风速、风向的标定。
所有传感器、步进电机的线缆通过电刷滑环导出,并在电脑端进行记录、处理;具体而言,真空环境模拟设备内部的调温热沉102,可设置背景温度,压力控制系统103可在容器外部设置内部压力,压力调节范围可达100Pa至常压;真空环境模拟设备101内的转台,转速可达0-150RPM,转台上安装有旋转编码器,可对当前转速进行反馈,安装于转台上的悬臂,长度为2-3m,通过“角速度╳半径”即可获知当前风速,安装于转台上的电刷滑环103,具有8个通道以上的数据传输能力,且转台控制系统,基于PLC硬件,可在控制器205上对转台201的转速进行设置,由转台控制系统204驱动转台201以设定转速转动,并读取旋转编码器反馈的当前转速传递至控制器205,由其完成的工作包括站台控制与监测,风速传感器数据测量与记录,步进电机角度设置等。