红外触摸屏的原理简述
红外触摸屏的原理简述
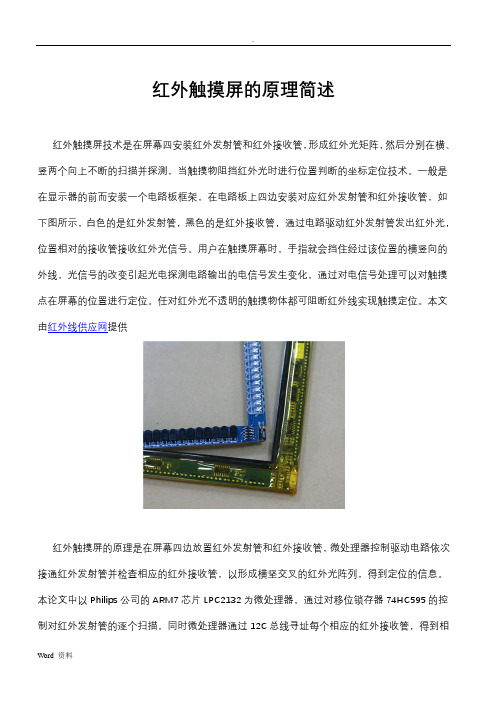
红外触摸屏的原理简述红外触摸屏技术是在屏幕四安装红外发射管和红外接收管,形成红外光矩阵,然后分别在横、竖两个向上不断的扫描并探测,当触摸物阻挡红外光时进行位置判断的坐标定位技术。
一般是在显示器的前而安装一个电路板框架,在电路板上四边安装对应红外发射管和红外接收管,如下图所示,白色的是红外发射管,黑色的是红外接收管,通过电路驱动红外发射管发出红外光,位置相对的接收管接收红外光信号。
用户在触摸屏幕时,手指就会挡住经过该位置的横竖向的外线,光信号的改变引起光电探测电路输出的电信号发生变化,通过对电信号处理可以对触摸点在屏幕的位置进行定位。
任对红外光不透明的触摸物体都可阻断红外线实现触摸定位。
本文由红外线供应网提供红外触摸屏的原理是在屏幕四边放置红外发射管和红外接收管,微处理器控制驱动电路依次接通红外发射管并检查相应的红外接收管,以形成横坚交叉的红外光阵列,得到定位的信息。
本论文中以Philips公司的ARM7芯片LPC2132为微处理器,通过对移位锁存器74HC595的控制对红外发射管的逐个扫描,同时微处理器通过12C总线寻址每个相应的红外接收管,得到相应的光强值。
微处理器根据接收到的被遮挡前后的光强信号得到触摸的位置信息,并通过串口将该信息传送给主机。
控制式如下图所示:微处理器电路:微处理器在红外触摸屏硬件系统中起着核心的作用:1、完成对红外发射电路的驱动;2、完成对红外接收电路的驱动;3、完成对是否被触摸的判断以及触摸位置信息的计算;4、将触摸位置信息通过中P1传送给主机;5、调试整个程序的运行。
本论文中采用Philips公司的ARM7芯片LPC2132作为微处理器。
该芯片是基于一个支持实时仿真和嵌入式跟踪的32/16位ARM7TDMI微控制器,并带有64kB的嵌入的高速Flash存储器。
具有EmbeddedICE-RT和嵌入式跟踪接口,可实时调试;多个串行接口,包括2个16C550工业标准DART,2个高速I2C接口SP1;多个32位定时器、1个10位8路ADC, 10位DAC,PWM通道和47个GP10以及多达9个边沿或电平触发的外部中断。
红外触摸屏原理
1、 基本原理介绍红外触摸屏的工作原理是在触摸屏的四周布满红外接收管和红外发射管,这些红外管在触摸屏表面呈一一对应的排列关系,形成一张由红外线布成的光网,当有物体(手指、带手套或任何触摸物体)进入红外光网阻挡住某处的红外线发射接收时,此点横竖两个方向的接收管收到的红外线的强弱就会发生变化,控制器通过了解红外线的接收情况的变化就能知道何处进行了触摸。
如下图所示。
2、 构成及工作流程1、 构 成: 红外触摸屏由三部分组成:控制器、发射电路、接收电路。
2、 工作流程工作时,控制器中的微处理器(ARM7或其它)控制驱动电路(移位锁存器)依次接通红外发射管并 同 时 通过地址线和数据线来寻址相应的红外接收管。
当有触摸时,手指或其它物就会挡住经过该位置的横竖红外线,微处理器扫描检查时就会发现该受阻得红外线,判断可能有触摸,同时立刻换到另一坐标再扫描,如果再发现另外一轴也有一条红外线受阻,表示发现触摸,并将两个发现阻隔的红外对管位置报告给主机,经过计算判断出触摸点在屏幕的位置。
其控制原理如图1所示。
3、 发射电路发射电路由移位锁存器(例如:TI公司的CD74AC164M)、3-TO-8多路输出选择器(例如:TI的74HC238D)、恒流驱动IC(例如美芯的MAX6966 、TI的ULN2803A等)、红外发射二极管等组成。
现以TI公司的CD74AC164M为例介绍发射电路工作流程。
CD74AC164M是一个8 Bit串行输入并行输出的位移锁存器。
微处理器通过IO口控制移位锁存器的时钟以及数据输入端。
扫描时微处理器通过IO端口将CD74AC164M的MR脚置为高电平,则CD74AC164M会自动把输出脚:Q0置为高电平,然后送入时钟信号:CP ,则在时钟信号的上升期移位锁存器自动将Q0的数据写入到Q1并保存。
在下一个时钟脉冲的上升沿到来时,把Q1的数据写入到Q2并Q1自动清,其它依次进行。
写入的脉冲会随移位时钟上升沿的到来不断的移位,直到从输出端移出。
红外触摸框 原理
红外触摸框原理一、引言红外触摸框作为现代电子设备中一种重要的输入设备,已广泛应用于各种智能终端、工业控制、多媒体教学等领域。
它通过红外线感应技术实现触摸定位,具有高精度、高稳定性、耐磨损等优点。
本文将深入探讨红外触摸框的工作原理、结构组成以及应用场景,以期为读者提供全面、深入的了解。
二、红外触摸框的基本原理红外触摸框的核心原理是利用红外线感应技术来检测触摸位置。
它主要由红外发射管、红外接收管、控制电路和触摸检测算法四部分组成。
1. 红外发射管与红外接收管红外触摸框的四周分布着若干对红外发射管和红外接收管。
这些管子按照一定的间距排列,形成一个红外线网格。
当没有物体触摸时,红外发射管发出的红外线被对应的红外接收管接收,形成一个稳定的红外线信号。
2. 触摸检测当有物体(如手指、触摸笔等)触摸红外触摸框表面时,触摸物体会遮挡部分红外线,导致对应位置的红外接收管无法接收到红外线信号。
通过检测哪些红外接收管失去了信号,可以判断触摸物体的位置。
3. 控制电路与触摸检测算法控制电路负责控制红外发射管的发射时序,以及采集红外接收管的信号。
触摸检测算法则根据采集到的信号判断触摸位置,并将位置信息转换为坐标数据输出给主机。
三、红外触摸框的结构组成红外触摸框主要由以下几个部分组成:1. 红外边框:红外边框内嵌有红外发射管和红外接收管,是红外触摸框的核心部件。
2. 触摸屏:触摸屏是用户直接操作的界面,一般采用透光性好的材料制成,如玻璃、亚克力等。
3. 控制电路板:控制电路板负责控制红外发射管的发射时序,采集红外接收管的信号,并进行触摸检测处理。
4. 连接线:连接线将红外触摸框与控制主机连接起来,传输触摸位置和坐标数据。
四、红外触摸框的应用场景红外触摸框广泛应用于各种智能终端、工业控制、多媒体教学等领域。
以下是一些典型的应用场景:1. 智能终端:红外触摸框可用于智能手机、平板电脑等智能终端设备,实现触摸操作和交互。
2. 工业控制:在工业控制领域,红外触摸框可用于操作面板、人机交互界面等,提高操作效率和便捷性。
红外触摸屏原理
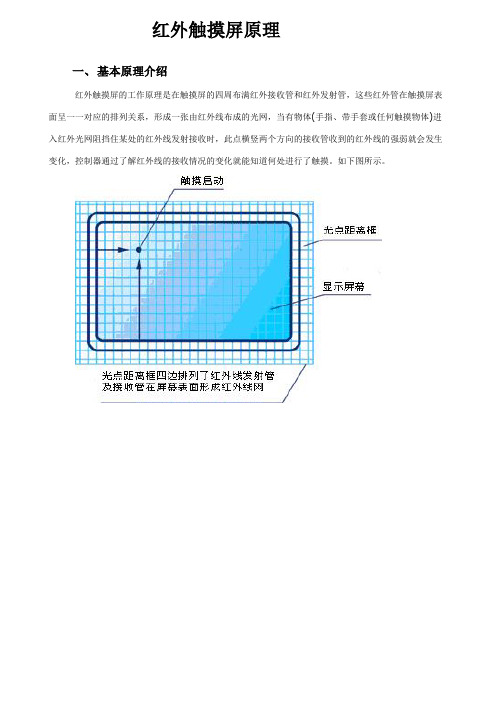
一、基本原理介绍红外触摸屏的工作原理是在触摸屏的四周布满红外接收管和红外发射管,这些红外管在触摸屏表面呈一一对应的排列关系,形成一张由红外线布成的光网,当有物体(手指、带手套或任何触摸物体)进入红外光网阻挡住某处的红外线发射接收时,此点横竖两个方向的接收管收到的红外线的强弱就会发生变化,控制器通过了解红外线的接收情况的变化就能知道何处进行了触摸。
如下图所示。
二、构成及工作流程1、构成:红外触摸屏由三部分组成:控制器、发射电路、接收电路。
2、工作流程工作时,控制器中的微处理器(ARM7或其它)控制驱动电路(移位锁存器)依次接通红外发射管并同时通过地址线和数据线来寻址相应的红外接收管。
当有触摸时,手指或其它物就会挡住经过该位置的横竖红外线,微处理器扫描检查时就会发现该受阻得红外线,判断可能有触摸,同时立刻换到另一坐标再扫描,如果再发现另外一轴也有一条红外线受阻,表示发现触摸,并将两个发现阻隔的红外对管位置报告给主机,经过计算判断出触摸点在屏幕的位置。
其控制原理如图1所示。
3、发射电路发射电路由移位锁存器(例如:TI公司的CD74AC164M)、3-TO-8多路输出选择器(例如:TI的74HC238D)、恒流驱动IC(例如美芯的MAX6966 、TI的ULN2803A等)、红外发射二极管等组成。
现以TI公司的CD74AC164M为例介绍发射电路工作流程。
CD74AC164M是一个8 Bit串行输入并行输出的位移锁存器。
微处理器通过IO口控制移位锁存器的时钟以及数据输入端。
扫描时微处理器通过IO端口将CD74AC164M的MR脚置为高电平,则CD74AC 164M会自动把输出脚:Q0置为高电平,然后送入时钟信号:CP ,则在时钟信号的上升期移位锁存器自动将Q0的数据写入到Q1并保存。
在下一个时钟脉冲的上升沿到来时,把Q1的数据写入到Q2并Q1自动清零,其它依次进行。
写入的脉冲会随移位时钟上升沿的到来不断的移位,直到从输出端移出。
红外式和表面声波式触摸屏
3红外式触摸屏3.1 红外检测技术红外线波长为0.76~400um的不可见光,红外线检测技术是利用同一波长的红外发射管,接收管(简称红外对管)的检测方法,只要有物体挡住红外对管间的连线,接收信号就急剧下降,因此红外线可用于检测物体的阻挡。
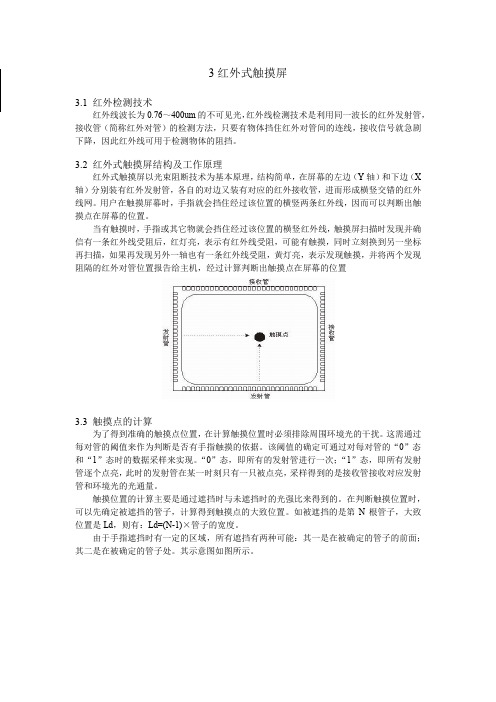
3.2红外式触摸屏结构及工作原理红外式触摸屏以光束阻断技术为基本原理,结构简单,在屏幕的左边(Y轴)和下边(X 轴)分别装有红外发射管,各自的对边又装有对应的红外接收管,进而形成横竖交错的红外线网。
用户在触摸屏幕时,手指就会挡住经过该位置的横竖两条红外线,因而可以判断出触摸点在屏幕的位置。
当有触摸时,手指或其它物就会挡住经过该位置的横竖红外线,触摸屏扫描时发现并确信有一条红外线受阻后,红灯亮,表示有红外线受阻,可能有触摸,同时立刻换到另一坐标再扫描,如果再发现另外一轴也有一条红外线受阻,黄灯亮,表示发现触摸,并将两个发现阻隔的红外对管位置报告给主机,经过计算判断出触摸点在屏幕的位置3.3 触摸点的计算为了得到准确的触摸点位置,在计算触摸位置时必须排除周围环境光的干扰。
这需通过每对管的阈值来作为判断是否有手指触摸的依据。
该阈值的确定可通过对每对管的“0”态和“1”态时的数据采样来实现。
“0”态,即所有的发射管进行一次;“1”态,即所有发射管逐个点亮,此时的发射管在某一时刻只有一只被点亮,采样得到的是接收管接收对应发射管和环境光的光通量。
触摸位置的计算主要是通过遮挡时与未遮挡时的光强比来得到的。
在判断触摸位置时,可以先确定被遮挡的管子,计算得到触摸点的大致位置。
如被遮挡的是第N根管子,大致位置是Ld,则有:Ld=(N-1)×管子的宽度。
由于手指遮挡时有一定的区域,所有遮挡有两种可能:其一是在被确定的管子的前面;其二是在被确定的管子处。
其示意图如图所示。
为了精确计算,需要计算这两种情况下位置的偏移量∆L1和∆L2,则有L=L d-∆L1+∆L2∆L1=[1-(X N-1-X(N-1)min)/ (X(N-1)max-X(N-1)min)]×管子的宽度∆L2=[1-(X N-X Nmin)/ (X Nmax-X Nmin)]×管子的宽度L是第N根管子被遮挡时的位置;∆L1为手指在被确定的管子前面时的偏移量;∆L2为手指在被确定的管子处时的偏移量;X N为扫描时第N根管子接收到的数据;X Nmax为“1”态时采样第N根管子接收到的数据;X Nmin为“0”态时采样第N根管子接收到的数据。
触摸屏的分类及其原理
触摸屏的分类及其原理通常,触摸屏系统由触摸检测传感部件和触摸屏控制器两部分器件组成。
前者采集用户的触摸信息并传送到控制器,后者通过对接收到的信息进行处理,得到用户的触摸位置,并将位置信息发送给上一层的主机,同时接收主机发送的控制命令并加以执行。
触摸屏的主要分类从技术原理上区分,触摸屏可以分成四个基本种类:红外技术触摸屏、表面声波触摸屏、电阻触摸屏、电容触摸屏。
下面将对以上四种触摸屏技术进行简单的介绍。
1、红外技术触摸屏该触摸屏由安装在触摸屏外框上的红外发射和接收器件构成。
发射器件在屏幕表面形成红外检测网,任何物体都可改变触点的红外线而实现触摸的检测。
红外触摸屏不受电流、电压和静电干扰,适合条件恶劣的工作环境,价格低,安装方便,响应速度快。
红外现在应用开始广泛化了,一般都是用于大型设备,比如电视上主持人的触摸大电视,寿命一般,准确率高,支持多点,透光率最好,最高100%。
2、表面声波触摸屏表面声波是沿介质表面传播的机械波。
此类触摸屏由触摸屏、声波发生器、反射器和声波接收器组成。
其中声波发生器产生一种高频声波跨越屏幕表面,在手指触摸时,触电上的声波被阻止,声波接收器由此确定坐标位置。
表面声波触摸屏不受温度、湿度等环境因素的影响,分辨率极高,有极好的防刮性,使用寿命长,透光率好,没有漂移,表面也不怕划,缺点是怕水和油污,脏了要维护。
3、电阻式触摸屏电阻触摸屏是一块与显示屏表面匹配的多层复合薄膜。
该结构以一层玻璃作为基层,表面涂一层透明的导电层(ITO,氧化铟),上层再覆盖一层防刮的塑料层,它的内表面也涂有一层ITO,四线和八线触摸屏由两层具有相同表面电阻的透明阻性材料组成,五线和七线触摸屏由一个阻性层和一个导电层组成,通常在两层导电层之间有许多细小(小于千分之一英寸)的透明隔离点把它们分隔开。
当触摸屏表面受到的压力(如通过笔尖或手指进行按压)足够大时,顶层与底层之间会产生接触。
所有的电阻式触摸屏都采用分压器原理来产生代表X坐标和Y坐标的电压。
触摸屏的工作原理
触摸屏的工作原理触摸屏可分为:表面声波屏、电阻压力屏、电容感应屏、红外屏。
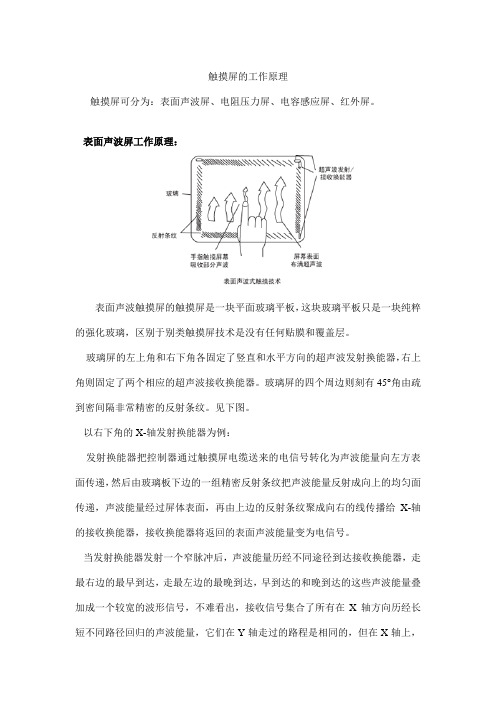
表面声波屏工作原理:表面声波触摸屏的触摸屏是一块平面玻璃平板,这块玻璃平板只是一块纯粹的强化玻璃,区别于别类触摸屏技术是没有任何贴膜和覆盖层。
玻璃屏的左上角和右下角各固定了竖直和水平方向的超声波发射换能器,右上角则固定了两个相应的超声波接收换能器。
玻璃屏的四个周边则刻有45°角由疏到密间隔非常精密的反射条纹。
见下图。
以右下角的X-轴发射换能器为例:发射换能器把控制器通过触摸屏电缆送来的电信号转化为声波能量向左方表面传递,然后由玻璃板下边的一组精密反射条纹把声波能量反射成向上的均匀面传递,声波能量经过屏体表面,再由上边的反射条纹聚成向右的线传播给X-轴的接收换能器,接收换能器将返回的表面声波能量变为电信号。
当发射换能器发射一个窄脉冲后,声波能量历经不同途径到达接收换能器,走最右边的最早到达,走最左边的最晚到达,早到达的和晚到达的这些声波能量叠加成一个较宽的波形信号,不难看出,接收信号集合了所有在X轴方向历经长短不同路径回归的声波能量,它们在Y轴走过的路程是相同的,但在X轴上,最远的比最近的多走了两倍X轴最大距离。
因此这个波形信号的时间轴反映各原始波形叠加前的位置,也就是X轴坐标。
发射信号与接收信号波形在没有触摸的时候,接收信号的波形与参照波形完全一样。
当手指或其它能够吸收或阻挡声波能量的物体触摸屏幕时,X轴途经手指部位向上走的声波能量被部分吸收,反应在接收波形上即某一时刻位置上波形有一个衰减缺口。
接收波形对应手指挡住部位信号衰减了一个缺口,计算缺口位置即得触摸坐标控制器分析到接收信号的衰减并由缺口的位置判定X坐标。
之后Y轴同样的过程判定出触摸点的Y坐标。
除了一般触摸屏都能响应的X、Y坐标外,表面声波触摸屏还响应第三轴Z轴坐标,也就是能感知用户触摸压力大小值。
其原理是由接收信号衰减处的衰减量计算得到。
三轴一旦确定,控制器就把它们传给主机。
触摸屏驱动原理

触摸屏驱动原理
触摸屏驱动原理基于电容变化的测量原理。
触摸屏是由一层导电膜覆盖在玻璃或塑料表面上形成的,平常不产生电流。
当手指或其他物体触摸到屏幕上时,触摸屏会感应到电流的变化。
触摸屏驱动器通过相应的算法来检测这些电流变化,并将其转化为对触摸点位置的坐标数据。
常见的触摸屏驱动技术有四种:电容式、电阻式、表面声波和红外线。
1. 电容式触摸屏驱动原理:
电容式触摸屏采用两层导电板构成电容,在不触摸屏幕时,电容平衡。
当手指触摸到屏幕上时,由于人体电容的存在,导致电容发生变化。
触摸屏驱动器会检测到变化的电容值,并通过测量和计算来确定触摸点位置。
2. 电阻式触摸屏驱动原理:
电阻式触摸屏由两层导电薄膜构成,中间夹有绝缘层。
当触摸屏被触摸时,导电薄膜会接触到一起,形成电阻的变化。
触摸屏驱动器通过测量电阻的变化来确定触摸点位置。
3. 表面声波触摸屏驱动原理:
表面声波触摸屏利用超声波传感器将声波传输到触摸屏表面。
当有物体触摸到触摸屏时,声波会被打断并反射回传感器。
触摸屏驱动器通过测量声波传输和反射时间的差异来确定触摸点位置。
4. 红外线触摸屏驱动原理:
红外线触摸屏在触摸屏表面周围设置红外线发射器和接收器,形成网状的红外线检测区域。
当有物体触碰到触摸屏时,会阻挡红外线的传输。
触摸屏驱动器会通过检测到的红外线被阻挡的位置来确定触摸点位置。
不同类型的触摸屏驱动原理各有优缺点,适用于不同场景和需求。
但无论采用哪种触摸屏驱动技术,其基本原理都是通过检测电容、电阻、声波或红外线的变化来确定触摸点位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外触摸屏的原理简述红外触摸屏技术是在屏幕四周安装红外发射管和红外接收管,形成红外光矩阵,然后分别在横、竖两个方向上不断的扫描并探测,当触摸物阻挡红外光时进行位置判断的坐标定位技术。
一般是在显示器的前而安装一个电路板框架,在电路板上四边安装对应红外发射管和红外接收管,如下图所示,白色的是红外发射管,黑色的是红外接收管,通过电路驱动红外发射管发出红外光,位置相对的接收管接收红外光信号。
用户在触摸屏幕时,手指就会挡住经过该位置的横竖方向的外线,光信号的改变引起光电探测电路输出的电信号发生变化,通过对电信号处理可以对触摸点在屏幕的位置进行定位。
任何对红外光不透明的触摸物体都可阻断红外线实现触摸定位。
本文由红外线供应网提供红外触摸屏的原理是在屏幕四边放置红外发射管和红外接收管,微处理器控制驱动电路依次接通红外发射管并检查相应的红外接收管,以形成横坚交叉的红外光阵列,得到定位的信息。
本论文中以Philips公司的ARM7芯片LPC2132为微处理器,通过对移位锁存器74HC595的控制对红外发射管的逐个扫描,同时微处理器通过12C总线寻址每个相应的红外接收管,得到相应的光强值。
微处理器根据接收到的被遮挡前后的光强信号得到触摸的位置信息,并通过串口将该信息传送给主机。
控制方式如下图所示:红外鮭麦屛控制戸理微处理器电路:微处理器在红外触摸屏硬件系统中起着核心的作用:1、完成对红外发射电路的驱动;2、完成对红外接收电路的驱动;3、完成对是否被触摸的判断以及触摸位置信息的计算;4、将触摸位置信息通过中P1传送给主机;5、调试整个程序的运行。
本论文中采用Philips公司的ARM7芯片LPC2132作为微处理器。
该芯片是基于一个支持实时仿真和嵌入式跟踪的32/16位ARM7TDMI微控制器,并带有64kB的嵌入的高速Flash 存储器。
具有EmbeddedICE-RT和嵌入式跟踪接口,可实时调试;多个串行接口,包括2个16C550工业标准DART,2个高速I2C接口SP1多个32位定时器、1个10位8路ADC, 10 位DAC , PWM通道和47个GP10以及多达9个边沿或电平触发的外部中断。
这部分电路中主要包括驱动红外发射部分,驱动红外接收部分,出口通信部分,JTAG调试部分。
驱动红外发射部分是由芯片上的第4脚,第44脚,第48脚来完成的,它们分别用于控制红外发射管亮暗状态的信号:DS、SH-CP、ST-CP。
电路原理理如下图所示:微处理器通过分别将二个信号按照一定的时序置高低电平,来控制每支红外发射管的亮暗状态。
每个管脚最大耐压为5V,但由于需要驱动165支红外发射管,导致电流很大,以至于容易将管脚烧坏。
为了解决这样的问题,在以上二个管脚上分别接上NPN管采用集电极输出电路来增大驱动能力。
同时由于输出反向,所以需将原来写入的高电平置为低电平,低电平置为髙电平。
驱动红外接收部分是由芯片上第8脚,第12脚,第16脚,第37脚,第41脚来成的。
其中第37脚,第41脚分别为I2C总线上的信号SCL,SDA;第8脚,第12脚,第16脚是芯片74HC4051的地址线信号。
电路原理于如下图所示:]3. 3[l 3”3VS.3VT J T这部分主要是微处理器通过I2C总线来寻址每个ADS7830来完成165支红外接收管的光强信号的放大、模数转换并将值传回到微处理器中。
由于165支红外接收管需要21片ADS7830来完成寻址,而微处理器上只有2个I2C接口所以必须要扩展I2C接口。
这里选用芯74HC4051 ,用二个地址线来扩展得到5个I2C接口,选通五组红外接收模块。
这样微处理器可以通过I2C总线逐一的寻址每支红外接收管。
串口通信部分是由第19脚,第21脚来完成的。
它们分别是串口总线上的信号TxDO,RxDO,用来将处理得到的触摸位置信息传送给主机。
电路原理图如下图所示:由于RS-232串行接口标准为一种在低速率串行通讯中增加通讯距离的单端标准。
其传送距离最大约为15米,最高速率为20kb/s。
RS-232是为点对点(即只用一对收、发设备)通讯而设计的,其驱动器负载低,只适合本地设备之间的通信。
它是一种非平衡的传送方式。
为了更好的满足红外触控的要求,这里采用RS-422标准串行接口进行传输。
RS-422标准全称是“平衡电压数字接口电路的电气特性”,它定义了接口电路的特性。
由于接收器采用髙输入阻抗,发送驱动器比RS-232具有更强的驱动能力,故允许在相同传输线上连接多个接收节点,最多可接10个节点。
即一个主设备(Master),其余为从设备(Salve,从设备之间不能通信,所以RS-422支持点对多的双向通信。
RS-422的最大传输距离为4000英尺(约1219米),最大传输速率为10Mb/s。
本文中采用芯片Max3490 作为RS-422的串行接口芯片。
Max3490 是一款工作在3.3V电压下,传输速率可达到10M bps的RS-422发送接收器。
它的引脚定义及应用电路如下图所示:DIPZ微处理器芯片中具有11个不同功能的寄存器。
这些寄存器用来实现串口上数据的接收和发送,它的基本功能框图如下JTAG调试部分是由第20脚,第24脚,第52脚,第56脚,第60脚,第64脚来成。
它们分别是TRST,TDI,TMS,TCK,TDO,RTCK。
其中信号TRST作为输入,用来测试复位;信号TDI 作为输入,用来测试数据的输入;信号TMS作为输入,用来测试模式的选择;信号TCK作为输入,用来测试时钟;信号TDO作为输出,用来测试数据的输出;信号RTCK作为输出,是返回的测试时钟。
其电路原理图如下:红外发射电路:本论文中红外触摸屏采用逐一点亮红外发射管的工作方式,整个红外发射电路是通过每片74HC595扫描8支红外发射管来实现的,其中红外发射管选用EVERL1GHT公司的发射管,其电路实现如下所示:由于红外发射管采用5V电压供电,而74HC595输出的高电平也为5V,这样在驱动红外发射管时就必须加限流电阻,以免造成芯片引脚被损坏。
而发射管电性曲线图(正向电压一正向电流)可知,红外发射管驱动电压在 1-1.5V 变化时,电流在10-100mA 间变化,因此对于10~100mA 的驱动电流,限流电阻阻值可估算出来。
Forward Current xs. F(»r^finl Voling^74HC595是一个可以实现8位数据的串入串出或串入并出的移位锁存器。
它具有移位时钟 (SHCP)和存储时钟(STCP),都是上升沿有效。
其时序如图下所示:S H-CF 3_FLTLJ —Ln_n_r"u —L_n_j~LJ —L_n_r~L_n_j —LJ —L_n_____ |ST^GRnnmmnnrnnmn rnMR [1 lOFrCJOQ "CM5]i iO7~ _________________________________________________________ |%口TE -'ttwa-恤芒 output 吟 in 3oiode微处理器主要是控制这两个时钟以及数据输入端 (DS)。
通过数据输入端将一个脉冲写入移 位寄存器,在移位时钟的上升沿可将写入的数据移入寄存器,并在存储时钟的上升沿将数据置 入内部锁存器中。
利用这样的特点,在移位时钟的上升沿可实现将输入的脉冲移至发射管,在 存储时钟的上升沿点亮发射管。
输入的脉冲会随移位时钟上升沿的到来不断的移位一直到从输出端移出。
将第一个的移位锁存器的输出端与下一级的输入端相连,可将前级的脉冲移入到下 一级中。
因此,可实现移位锁存器的级联,同时微处理器实现了对更多的发射管的驱动,结合 以上特点,可以实现将发射管逐个点亮。
整个红外发射电路的扫描过程如下图所示:IO 4JO 1Forward Voltace 叭ipT^O.O l说聲腔翻药片ion其中变量Count为被扫描的红外发射管的个数。
由于是一行扫描过去的,所以当一支红外发射管被点亮后Count自加。
当所有的红外发射管被逐一点亮后Count应该等于红外发射管的总数。
当不等于165时说明扫描过程还没有结束,所以被置入的脉冲继续在移位时钟和存储时钟作用下扫描下一支红外发射管由于未上电前芯片的内部状态是随机的,所以刚一上电后所有的红外发射管并不是理想的“0 ”态,会出现很多支红外发射管同时被点亮。
这种状态造成红外发射管的电流过大,整个系统中的驱动电压被严重拉下来,使得微处理器芯片不能正常的工作。
所以必须采用大电流的电源输入,在上电后对红外发射电路进行清零处理。
通过这样的处理使得芯片可以正常工作。
只需要向数据端DS写入0,即可实现对红外发射电路进行清零处理。
红外接收电路:在红外触摸屏中红外接收电路至关重要,它完成了相对应的红外发射管的光强信号的采集得到了判断是否被触摸的基础数据。
本论文中的红外接收电路是通过芯片 ADS7830来实现的, 电路原理如下图所示:(只列出四组接收)红外接收管选用EVERLIGHT (亿光)公司的光敏三极管。
它是一种快速响应,高灵敏度的 光电二极管,具有高速、高灵敏度的 NPN 型外延平而,响应波长为980nm 。
ADS7830是一个带有I 2C 接口的8路采样通道的8位模数转换器。
它的采样速率可以达到 70kHz;既可以4对差分输入,也可以8路单独输入;工作在2.7V 到5V 的电压下;其内建参考电 压为2.5V;支持标准、快速、高速二种I 2C 工作模式。
它的结构如下图:I 2C 总线是双向传输的总线,在传送数据过程中共有四种类型信号,它们分别是:开始信号、结束信号、应答信号和位传送信号1) 开始信号:SCL 为髙电平时,SDA 山髙电平向低电平跳变,开始传送数据。
2) 结束信号:SCL 为髙电平时,SDA 由低电平向高电平跳变,结束传送数据。
3) 应答信号:接收数据的从器件在接收到8Bit 数据后,向发送数据的主器件发出特定的低电 平脉冲,表示巳收到数据。
主器件向受控单元发出一个信号后,等待受控单元发出一个应答信号,从器件接收到应答信号后,根据情况做出判断是否要继续传递信号。
若未收到应答信号, 则判断为受控单兀出现问题。
4)位传送信号:在I 2C 总线启动后或应答信号后的第1个到8个时钟脉冲对应个字节的 8Bit 数据传送。
脉冲髙电平期间,数据串行传送;低电平期间为数据准备,允许总线上数据电平 变换。
8廿CM2 CH4 01*15 CH6 CM /VIL>U::心IA.1 AD COM REFflAl AD5)同步时钟允许器件通过总线以不同的波特率进行通信,同时可以作为停止和重新启动串行总线的握手方式。
由于ADS7830带有l2C接口,这样可以通过I2C总线与微处理器进行通信。