飞思卡尔PID程序
电机PID(重要)

飞思卡尔智能车电机PID提到小车的控制必然想到的PID控制,这也是各技术报告都不会漏掉的名词,在飞思卡尔XS128系列(二)PWM模块中已经提到了一些电机控制方面的东西,主要讲了用PID和BANG-BANG 控制相结合的方式来控制电机,就是由BANG-BANG来控制力度,用PID来控制精度,下面就具体来讲讲。
先说控制,所谓控制首先由闭环控制和开环控制之分,就是所谓的有反馈和无反馈,当然PID显然是有反馈的控制。
所谓的闭环控制就是要根据被控制量的实际情况参与运算来决定操作量的大小或者方向。
因为在单回路控制系统中,由于扰动的作用使被控参数偏离给定值,从而产生偏差,而自动控制系统的调节单元将来自变送器的测量值与给定值相比较后产生的偏差进行比例、积分和微分运算,并输出统一标准信号,去控制执行机构的动作,以实现对温度、压力、流量和速度等的自动控制。
然而牵扯到高级PID,像有自适应控制、模糊控制、预测控制、神经网络控制、专家智能控制等等,里面也就模糊控制搞过一定时间,其它我也不懂,就不瞎扯了。
比例、积分和微分的线性组合,构成控制量u(t),称为:比例(Proportional)、积分(Integrating)和微分(Differentiation)控制,简称PID控制。
比例作用P只与偏差成正比,积分作用I是偏差对时间的累积,而微分作用D是偏差的变化率。
用一句形象的比喻,比例P代表着现在,积分I代表着过去,而微分D则代表着未来。
公式如图:具体于比例、积分和微分,网上有很多这方面的资料,我就不多说了。
下面是关于参数的调整,比例系数、积分系数和微分系数的合理调整时整个PID系统可以正常温度工作的关键。
而最好的寻找PID参数的办法是从系统的数学模型出发,从想要的反应来计算参数。
很多时候一个详细的数学描述是不存在的,这时候就需要从实际出发去调整PID参数了。
Ziegler——Nichols方法Ziegler——Nichols方法是基于系统稳定性分析的PID整定方法,在设计过程中无需要考虑任何特性要求,整定方法简单。
第五界飞思卡尔智能车大赛程序(光电组)

}
else if(turn_value==direction_turn[0])
{
turn_value=direction_turn[0];
speed_expect=speed_set[0];
}
break;
case 2:if(turn_value==direction_turn[0])
//The PIT module has no external pins.
//PIT 模式没有外部引脚
unsigned char light=0; //激光管检测标志
unsigned short turn_value=0; //转向的PWM数值
unsigned short direction_turn[7]={333,430,560,647,705,780,888}; //转向给定值初始化
{
turn_value=direction_turn[6];
speed_expect=speed_set[6];
}
else if(turn_value==direction_turn[6])
{
turn_value=direction_turn[6];
speed_expect=speed_set[6];
}
else if(turn_value==direction_turn[2])
{
turn_value=direction_turn[1];
speed_expect=speed_set[1];
}
break;
case 4:if(turn_value==direction_turn[1])
飞思卡尔程序调试技巧

一、前言调试程序,是软件开发过程中的一个必不可少的环节。
这篇帖子,匠人试着来整理一下一些调试的技巧。
说到“技巧”,这个词自从被所长批臭之后,匠人就吓得不敢再提,生怕一不小心就暴露了思想的浅薄和眼光的局限,呵呵。
所以咱们不叫“技巧”,干脆低调点,就叫“雕虫小技”吧。
这里所讨论的“调试”技巧,有些是必须结合开发工具本身的功能来实现,而有些可以通过烧录芯片来验证。
各种开发工具,提供的功能多少强弱也不尽相同,这些方法也未必都能套用。
仅供参考吧。
最后说明一下,这是没有草稿的帖子,匠人仍然以不定期连载的方式,边写边发边改。
可能结构会比较混乱。
欢迎大家一起参与讨论。
二、磨刀不误砍柴功在调试之前,需要掌握以下一些基本功:1、熟悉当前的开发(调试)环境,比如:设置断点、单步运行、全速运行、终止运行,查看RAM、查看堆栈、查看IO口状态……总之,要熟练掌握基本操作的方法,并深刻了解其中意义。
2、了解芯片本身的资源和特性。
3、了解一点汇编语言的知识。
(本来匠人是准备写“精通”的,但考虑到现状,还是“放低”这方面的要求罢了)。
4、掌握基本的电路知识和排错能力。
(软件调试有时也会牵涉到硬件原因。
总不能连三极管的好坏都不能识别吧?)5、万用表、示波器、信号发生器……这些工具总该会用吧?6、搜索、鉴别资料的能力。
(内事问百度、外事问古狗、有事没事上21ic网)7、与人沟通,描述问题的能力。
(调试36计的最后一计——就是向他人讨教。
当然,你得把话说明白才行)差不多了,如果上述7把砍柴刀磨好了,就可以开始调试了。
接下来,请调入你的程序……三、优先调试人机界面面对程序中的一大堆模块,无从下手是吗?好吧,匠人告诉你,先调显示模块,然后是键盘。
为什么要先调显示模块?道理很简单,我们说“眼睛是心灵的窗户”,同样,“显示是程序的窗户”。
一旦把显示模块调试好了,就可以通过这个窗口,偷窥(天呐,这两个居然是敏感字!)程序内部的数据和状态了。
然后紧接着,就是调试键盘模块。
PID控制算法(PID控制原理与程序流程)
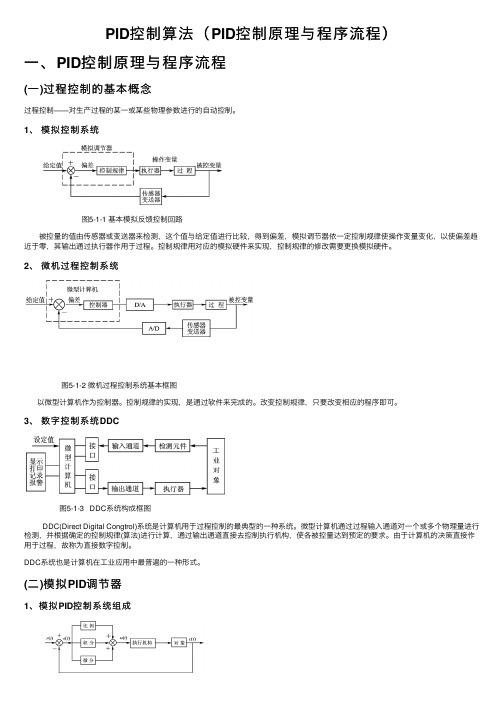
PID控制算法(PID控制原理与程序流程)⼀、PID控制原理与程序流程(⼀)过程控制的基本概念过程控制――对⽣产过程的某⼀或某些物理参数进⾏的⾃动控制。
1、模拟控制系统图5-1-1 基本模拟反馈控制回路被控量的值由传感器或变送器来检测,这个值与给定值进⾏⽐较,得到偏差,模拟调节器依⼀定控制规律使操作变量变化,以使偏差趋近于零,其输出通过执⾏器作⽤于过程。
控制规律⽤对应的模拟硬件来实现,控制规律的修改需要更换模拟硬件。
2、微机过程控制系统图5-1-2 微机过程控制系统基本框图以微型计算机作为控制器。
控制规律的实现,是通过软件来完成的。
改变控制规律,只要改变相应的程序即可。
3、数字控制系统DDC图5-1-3 DDC系统构成框图DDC(Direct Digital Congtrol)系统是计算机⽤于过程控制的最典型的⼀种系统。
微型计算机通过过程输⼊通道对⼀个或多个物理量进⾏检测,并根据确定的控制规律(算法)进⾏计算,通过输出通道直接去控制执⾏机构,使各被控量达到预定的要求。
由于计算机的决策直接作⽤于过程,故称为直接数字控制。
DDC系统也是计算机在⼯业应⽤中最普遍的⼀种形式。
(⼆)模拟PID调节器1、模拟PID控制系统组成图5-1-4 模拟PID控制系统原理框图2、模拟PID调节器的微分⽅程和传输函数PID调节器是⼀种线性调节器,它将给定值r(t)与实际输出值c(t)的偏差的⽐例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进⾏控制。
a、PID调节器的微分⽅程式中b、PID调节器的传输函数3、PID调节器各校正环节的作⽤a、⽐例环节:即时成⽐例地反应控制系统的偏差信号e(t),偏差⼀旦产⽣,调节器⽴即产⽣控制作⽤以减⼩偏差。
b、积分环节:主要⽤于消除静差,提⾼系统的⽆差度。
积分作⽤的强弱取决于积分时间常数TI,TI越⼤,积分作⽤越弱,反之则越强。
c、微分环节:能反应偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太⼤之前,在系统中引⼊⼀个有效的早期修正信号,从⽽加快系统的动作速度,减⼩调节时间。
飞思卡尔智能车电磁组分区算法介绍
飞思卡尔智能车电磁组分区算法介绍写在之前的话:1、⽬前我是⼀名在校学⽣,这也是我第⼀次写博客,不周之处,请多谅解;2、此算法并⾮原创,借鉴⾃⼭东德州学院第⼋届⽩杨队(PS:个⼈看法,对于⼀些⼈把别⼈的开源东西改头换⾯⼀下就说是⾃⼰的原创⾏为⼗分鄙视);3、对于此算法的理解和说明并⾮纸上谈兵,算法已经被我运⽤到了⼩车⽐赛中并取得好的成绩(具体就不多说了,⽐赛时车莫名其妙坏了,⽐赛前调试的速度绝对能进国赛,⽐较遗憾),总之这算法是我尝试过的最好的算法;4、这⼀次所介绍的只是路径算法和⼀些知识普及,后⾯有时间会介绍其余部分算法及许多好的思路(舵机电机控制思路(不只是简单的PID),双车策略);5、希望对于这⽅⾯有涉及的⼈能与我联系并交流或指出不⾜之处。
---------------------------------------------------------------分割线-----------------------------------------------------------------------------⼀、没有这⽅⾯了解的可以看看 飞思卡尔智能车分为三组:摄像头、光电、电磁,我做的是电磁车,三种车队区别在于传感器的不同,所以获得路径信息的⽅法也不⼀样,摄像头和光电识别的是赛道上的⿊线(⽩底赛道),⽽电磁车则是检测埋在赛道下的通⼊100mh电流的漆包线,摄像头和光电采⽤的是摄像头和ccd作为传感器,电磁则是⽤电感放在漆包线周围,则电感上就会产⽣感应电动势,且感应电动势的⼤⼩于通过线圈回路的磁通量成正⽐,⼜因为漆包线周围的磁感应强度不同,因此不同位置的电感的感应电动势就不同,因此就可以去确定电感位置;因此在车⼦前⾯设置了50cm的前瞻,电感布局如下(怎么发不了图⽚):分为两排,前排3个,编号0,1,2(前期还加了两个竖直电感⽤来帮助过直⾓弯,后来改为了⼋字电感);后排2个,编号3,4;现在车⼦获得了不同位置的感应电动势的⼤⼩了,但这些值是不能处理的:1、感应电动势太微弱;2、是模拟信号,信号太微弱就放⼤它;这就涉及到模拟电路的知识了,就不多说了(因为要把这讲完到PCB绘制的篇幅就⾜够写另开⼀号专门写这些⽅⾯来(PS:题外话(我的题外话⽐较多)):放⼤部分外围你设计的再好也抵不过⼀个更好的芯⽚,有两个例⼦,⼀个是我⾃⼰的:之前⽤的是NE5532,但是效果不理想,加了好多什么滤波,补偿,都⽤上,没⽤,软件⾥处理后⾯再说,后来⼀狠⼼换了AD620,感觉像是春天来了,因为它是仪⽤放⼤器,还有就是贵。
摄像头pid算法思路
基于CCD摄像头智能车分段PID控制算法设计自动寻迹智能车涉及到当前高技术领域内的许多先进技术,其中最主要的是传感技术、路径规划和运动控制。
本课题是以飞思卡尔智能车竞赛为背景,以单片机作为核心控制单元,以摄像头作为路径识别传感器,以直流电机作为小车的驱动装置,以舵机控制小车转向。
车模竞赛的赛道是一个具有特定几何尺寸约束、摩擦系数及光学特性的KT板,其中心贴有对可见光及不可见光均有较强吸收特性的黑色条带作为引导线,宽度为2.5 cm。
在行驶过程中,系统通过摄像头获取前方赛道的图像数据,同时通过测速传感器实时获取智能车的速度,采用路径搜索算法进行寻线判断和速度分析,然后作控制决策,控制转向舵机和直流驱动电机工作。
智能车通过实时对自身运动速度及方向等进行调整来“沿”赛道快速行驶。
本文主要介绍摄像头通过提取赛道黑线信息交予单片机处理,通过单片机输出控制信号控制舵机转向来控制车模的转向,从而很好的自动循迹。
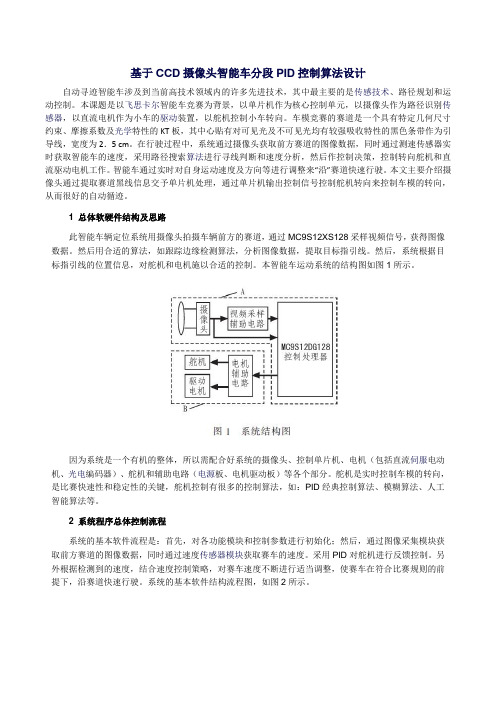
1 总体软硬件结构及思路此智能车辆定位系统用摄像头拍摄车辆前方的赛道,通过MC9S12XS128采样视频信号,获得图像数据。
然后用合适的算法,如跟踪边缘检测算法,分析图像数据,提取目标指引线。
然后,系统根据目标指引线的位置信息,对舵机和电机施以合适的控制。
本智能车运动系统的结构图如图1所示。
因为系统是一个有机的整体,所以需配合好系统的摄像头、控制单片机、电机(包括直流伺服电动机、光电编码器)、舵机和辅助电路(电源板、电机驱动板)等各个部分。
舵机是实时控制车模的转向,是比赛快速性和稳定性的关键,舵机控制有很多的控制算法,如:PID经典控制算法、模糊算法、人工智能算法等。
2 系统程序总体控制流程系统的基本软件流程是:首先,对各功能模块和控制参数进行初始化;然后,通过图像采集模块获取前方赛道的图像数据,同时通过速度传感器模块获取赛车的速度。
采用PID对舵机进行反馈控制。
另外根据检测到的速度,结合速度控制策略,对赛车速度不断进行适当调整,使赛车在符合比赛规则的前提下,沿赛道快速行驶。
四轴PID调试心得
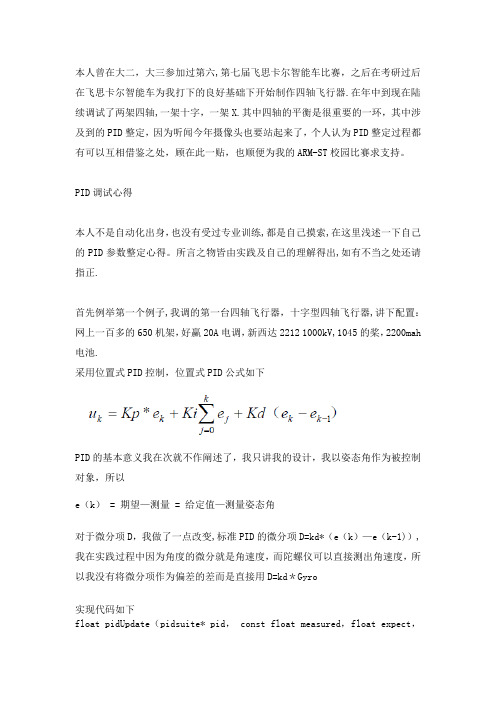
本人曾在大二,大三参加过第六,第七届飞思卡尔智能车比赛,之后在考研过后在飞思卡尔智能车为我打下的良好基础下开始制作四轴飞行器.在年中到现在陆续调试了两架四轴,一架十字,一架X.其中四轴的平衡是很重要的一环,其中涉及到的PID整定,因为听闻今年摄像头也要站起来了,个人认为PID整定过程都有可以互相借鉴之处,顾在此一贴,也顺便为我的ARM-ST校园比赛求支持。
PID调试心得本人不是自动化出身,也没有受过专业训练,都是自己摸索,在这里浅述一下自己的PID参数整定心得。
所言之物皆由实践及自己的理解得出,如有不当之处还请指正.首先例举第一个例子,我调的第一台四轴飞行器,十字型四轴飞行器,讲下配置:网上一百多的650机架,好赢20A电调,新西达2212 1000kV,1045的桨,2200mah 电池.采用位置式PID控制,位置式PID公式如下PID的基本意义我在次就不作阐述了,我只讲我的设计,我以姿态角作为被控制对象,所以e(k) = 期望—测量 = 给定值—测量姿态角对于微分项D,我做了一点改变,标准PID的微分项D=kd*(e(k)—e(k-1)),我在实践过程中因为角度的微分就是角速度,而陀螺仪可以直接测出角速度,所以我没有将微分项作为偏差的差而是直接用D=kd*Gyro实现代码如下float pidUpdate(pidsuite* pid, const float measured,float expect,float gyro){float output;static float lastoutput=0;pid—〉desired=expect;//获取期望角度pid—>error = pid-〉desired - measured; //偏差:期望-测量值 pid—>integ += pid—>error * IMU_UPDATE_DT; //偏差积分if (pid—>integ > pid—>iLimit) //作积分限制{pid->integ = pid-〉iLimit;}else if (pid-〉integ 〈—pid-〉iLimit){pid-〉integ = —pid->iLimit;}// pid—〉deriv = (pid—>error — pid—>prevError) / IMU_UPDATE_DT;//微分应该可用陀螺仪角速度代替pid->deriv = -gyro;if(fabs(pid—>error)>Piddeadband)//pid死区{pid—〉outP = pid-〉kp * pid—〉error;//方便独立观察pid->outI = pid—>ki * pid—〉integ;pid—>outD = pid-〉kd * pid-〉deriv;output = (pid-〉kp * pid—>error) +(pid-〉ki * pid->integ) +(pid—〉kd * pid-〉deriv);}else{output=lastoutput;}pid->prevError = pid->error; //更新前一次偏差lastoutput=output;return output;}我这么做的原因是因为,如果使用传统的D的形式,在我快速打舵时会产生输入的设定值变化频繁且幅度较大,四轴飞行器会迅速回到新的期望点,说白了就是非常灵活,四轴回复很猛,也许造成系统的振荡,对PID参数要求较高。
PID控制原理及编程方法

PID控制原理及编程方法PID控制是一种常见的控制算法,用于调节系统输出与期望输入之间的偏差。
PID控制的原理是根据当前的误差、误差变化率和误差累积值来调整系统输出,从而使系统输出逐渐接近期望输入。
PID控制具有简单易实现、调节性能良好的特点,被广泛应用于各种自动控制系统中。
比例项是根据当前误差的大小来调整系统输出,比例增益参数Kp决定了比例项的权重。
当误差较大时,比例项的影响较大,系统输出会迅速调整;当误差较小时,比例项的影响较小。
积分项是根据误差累积值来调整系统输出,积分增益参数Ki决定了积分项的权重。
积分项可以弥补比例项无法完全消除的稳态误差,使系统更加准确地跟踪期望输入。
微分项是根据误差变化率来调整系统输出,微分增益参数Kd决定了微分项的权重。
微分项可以抑制系统的震荡和超调,使系统响应更加平滑。
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt其中,u(t)为系统输出,e(t)为当前误差,de(t)/dt为误差变化率。
离散PID控制适用于基于采样的离散系统,通常在嵌入式系统中应用较多。
离散PID控制的基本步骤如下:1.初始化PID参数:设置比例增益Kp、积分增益Ki和微分增益Kd的初值,以及误差累积值和上一次误差的初值。
2.读取当前输入和期望输入。
3.计算当前误差:e(t)=期望输入-当前输入。
4. 计算比例项:Proportional = Kp * e(t)。
5. 计算积分项:Integral = Ki * ∑e(t)dt。
其中,∑e(t)dt是误差累积值,可以通过将当前误差加到上一次误差累积值上来计算。
6. 计算微分项:Derivative = Kd * (e(t) - 上一次误差)。
7. 计算PID输出:u(t) = Proportional + Integral + Derivative。
8.将PID输出作为系统控制信号。
9.更新上一次误差和误差累积值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
}
#pragma CODE_SEG __NEAR_SEG NON_BANKED
void interrupt 66 timer0(void) //1ms执行函数程序
{
PITTF_PTF0 = 1; //PIT中断标志位清零
count++;
if(count>9) //10MS一次中断,用来读取编码器脉冲值
}
void main(void)
{
DisableInterrupts;
DDRP=0xFF;
DDRB=0xFF;
DDRA=0x00;
PORTB=0x24;
Init_PLL();
PIT_Init();
Init_PWMB();
Init_Event_Count();
EnableInterrupts;
for(;;)
volatile int count;
volatile int pulse;
//时钟初始化
void Init_PLL(void)
{
CLKSEL = 0X00;//disengage PLL to system
PLLCTL_PLLON = 1;//turn on PLL
SYNR = (0xc0|0x18); //SYDIV=0X18=24
{
PORTB |=(1<<5);
PORTB &= ~(1<<4);
PWMDTY23 = M_PWM;
}
void Moto_PID()
{
volatile static int err=0,last_err=0,derr=0;
volatile static int M_PWM=0;
err=think_speed-pulse;// err
PWMDTY23 = 1800; //占空比1/20
PWMPER23 = 2778; //周期20ms
PWME_PWME3 = 1; //enable pwm3
}
//PIT定时中断
void PIT_Init(void)
{
INT_CFADDR = 0x70;
INT_CFDATA5 = 0x07; //设置为最高级
}
void Init_PWMB(void) //控制后轮电机
{
PWMCTL_CON23 = 1; //级联2,3通道
PWME_PWME3 = 0;//关闭3通道
PWMPRCLK =0x00; //选择时钟B,50MHZ
PWMPOL_PPOL3 = 1; //起始波为高电平
PWMCNT23 = 0; //计数器从零开始计数
derr=err-last_err;
M_PWM+=err*10+derr*15; //15 5
if(M_PWM<=0)
M_PWM=0;
if(M_PWM>=2777)
M_PWM=2777;
last_err=err; //记录上次偏差值
Start_Moto(M_PWM);//电机前进的控制函数,换成自己的就行了
#include <hidef.h> /* common defines and macros */
#include "derivative.h" /* derivative-specific definitions */
#define think_speed 30 // think_speed是用来控制电机轮子的转速的,给定他们不同的值,轮子就不同的转速,
{
count=0;
pulse=PACNT; //读取脉冲值
Moto_PID();
//进行电机的PID控制
PACNT=0; //脉冲累加器计数器清零
}
}
#pragma CODE_SEG DEFAULT
REFDV = (0x40|0x07); //REFDIV=0X07=7
POSTDIV = 0x00; //pllclock=2*osc*(1+SYDIV)/(1+REFDIV)=100MHz;
_asm(nop); //BUS CLOCK=50M
_asm(nop);
_asm(nop);
_asm(nop);
PITCFLMT_PITE = 0; //PIT is disabled.
PITCE_PCE0 = 1; //0 Chanel is enabled.
PITMUX_PMUX0 = 0; //使用子定时器0
PITMTLD0 = 200; //子定时器0设置为4us
PITLD0 = 250; // 1ms
{
DDRT=0x00;
PERT=0xC0;//编码器脉冲累加器口为输入,上拉有效。其他口没作用。
PACTL = (1<<6);//脉冲累加器启动,外部发生一次下降沿就计数一次。外部编码器连接到IOC7,IOC6.
//在中断里读取PACNT的值就是脉冲个数。读取后清零PACNT。
}Байду номын сангаас
void Start_Moto(uint M_PWM) //第一路电机
PITCFLMT_PFLMT = 1; //使能计数器0
PITFLT_PFLT0 = 1; //使能计数器1
PITINTE_PINTE0 = 1; //通道0中断打开
PITTF_PTF0 = 1; //清中断标志位
PITCFLMT_PITE = 1; // PIT is enabled
}
void Init_Event_Count(void)
_asm(nop);
_asm(nop);
_asm(nop);
_asm(nop);
_asm(nop);
while(!(CRGFLG_LOCK==1));//when pll is steady ,then use it;
CLKSEL_PLLSEL = 1;//engage PLL to system;