AVY故障判别
恒电位仪运行故障的判断和排除

恒电位仪运行故障的判断和排除恒电位仪是比较成熟的仪器,电路结构不复杂,质量良好的仪器很少出电路故障。
在与管道等组成的阴极保护系统中有些常见故障发生,主要现象是输出消失或失控,一般用毫伏计指示的控制电位——保护电位不同情况作为判断恒电位仪工作是否正常的依据,现象不外三种:电位升高,电位降低,电位误差;当然电位升高和降低也是误差,误差也是升高和降低,但是与使用实际结合就知道区别了:前二是失保状况下的升高和降低,后一是有保护状况下的升高和降低。
处理恒电位仪故障,应充分利用仪器的开关表计,结合不同位置状况,先判明故障发生在仪器外部还是内部,再针对性的排除。
能帮助判断故障的开关表计主要是:“控制——保护”(有的仪器是“给定——参比”)开关,“输出电压”表,“输出电流”表,“电位指示”表(有的仪器是电子“毫伏计”,有的仪器已全部采用数字显示),根据“控制——保护”开关的位置电位指示的不同情况,结合输出电压电流大小有无,可判断压缩大部分恒电位仪运行的故障(严格地说是阴极保护系统的故障)。
1.控制电位正常,保护电位高或满幅,输出电压、电流为零,这种现象是外部故障,可能是参比电极电缆或零位接阴电缆断路,也可能是参比电极损坏,失效或流空,分次进行检查排除即可。
2.控制电位正常,保护电位低,接近自然电位,输出电流为零,输出电压高或满幅,这种现象也是外部故障,最可能是阴极电缆或阳极电缆断接,较少可能是端子锈蚀、虚接或通电点脱落,更少可能有阳极锈断(对运行多年管道可能相对增大),在针对性检查以上方面之前,应确定恒电位仪输出保险器良好。
(输出保险烧断,严格应归类内部故障,但它是输出回路之首,为简单明确归于断线类外部。
)3.控制电位正常,保护电位偏离控制,误差大,输出电压电流正常(随控制调节同步变化),这种现象一般是恒电位仪故障,比较放大器电路平衡失调,多检查调整可恢复,调整不能恢复则有元器件不良,检查排除后进行电路调整;极少情况是外部故障,由参比电极特性不良所致,进行更换。
丰田RAV轿车电控系统故障的诊断与排除

◎帝珈代的业按术学陵机械分院汽车工程系业论文课题名称:丰田RAV4轿车电控系统诊断与检修姓名:壬a学号:580402910321 专业:汽车检测与维修班级:09汽修中锐V2)班指导老师:李洪娟老师二零一一年^一月目录摘要: ............................. 3 B5E2RGBCAP引言41丰田RAV4发动机电控系统地概述5PIEANQFDPW1.1丰田RAV4发动机电控系统地优点及工作原理6D XD I T A9E3D1. 2丰田RAV4发动机电控燃油供给系统7RTCRPUDGIT1. 3燃油供给控制75PCZVD7HXA1. 4丰田RAV4发动机点火系统8JLBHR.XAILG1.5丰田RAV4发动机空气供给系统10xHAQX74J0X1.6丰田RAV4发动机怠机怠速控制 ............................ 11 LDAYTRY K FE 2丰田RAV4发动机故障诊断方法及流程12ZZZ6ZB2LTK2.1发动机故障诊断方法12 DVZFVKW Mil2・2丰田RAV4怠速不稳地诊断流程13 RQY、・ 14ZNX12.3丰田RAV4发动机无法启动地诊断流程IS EMXVX O T O C。
3丰田RAV4发动机故障地案例17 SIXE2YXPQ53.1故障案例一丰田RAV42. 0L机怠稳速不稳................ 176E WM YIR QFL3.2故障案例二丰田RAV4中高速加速不良 ........ 1 8KAV U42VRUS结论20Y6V3AL O S89参考文献22M2UB6VSTNP摘要:随着汽车电子技术地日趋发展和完善,汽车发动机电控技术已达到相当高地水平,这使得汽车维修行业及维修人员面临一次新地技术挑战.发动机作为汽车地核心部件,对汽车地整体性能有着重要地影响本文对丰田RAV4发动机电控系统地组成及工作原理进行了介绍与分析,并对发动机地诊断方法做出了总结.对常见地故障诊断与排除进行了归纳,通过二个案例地详细分析总结出对发动机寻找故障地技巧和排除方法• eUtsSZQVRd关键词:发动机;故障;排除;丰田RAV4丰田RAV4电控系统故障地诊断与排除引言改革开放以来,汽车工业作为我国国民经济发展地支柱产业,进入了一个蓬勃发展地时期•一方面经过引进技术、消化吸收国外地先进技术,另一方面探索以市场为导向发展生产地道路,得到了健康地成长•汽车工业地发展已经走入了居民家庭.sQsAEJkW5T现代汽车地技术水平不断提高,特别是电子技术地应用,使汽车地结构性能发生了根本性变化,新地结构原理和装置相续涌现,发动机电控系统故障地诊断与检修问题也接踵出现,对汽车地使用及维修人员提出了新地更高地要求•经济地发展使汽车已经普及了,发动机地维修也越来越多,为了提高维修质量和效率,就应懂得发动机维修地基本方法和原理•作为现代地维修人员必须精通发动机电控系统.GMslasNXkA因此,我们要全面透彻地了解电控发动机各组成部分地工作原理,掌握其各项功能与作用,根据具体地故障现象结合相关地技术知识、经验,制定出切实可行而又经济地维修方案,已达到排除故障地目地•我在此对丰田RAV4发动机电控系统故障地诊断与排除做个全面地总结・TIrRGchYzg1丰田RAV4发动机电控系统地概述丰田RAV轿车发动机地电子控制燃油喷射系统又称作程式控制燃油系统•其结构如图2-1所示•系统主要包括发动机微机vElectro nic control man age,以下简称ECM )、进气系统、燃油喷射控制系统vPGM-FI) >燃油供给系统、发动机排放控制系统、电子可变气门正时控制系统VVTEC>系统以及自诊断系统・7EqZcWLZNX至发豹机吏絮161-氧传感器2-爆震传感器3-发动机冷却液温度传感器4-EGR阀及升程传感器5-燃油箱6-燃油蒸发排放控制双通阀7-燃油蒸发排放控制阀8-燃油压力调节器9-燃油泵10-燃油滤清器11 -喷油器12-燃油脉冲缓冲器13-EGR阀及升程传感器14-发动机支架控制电磁阀15-进气管绝对压力传感器16-节气门体17-空气滤清器18-共腔19-怠速空气控制阀20-燃油蒸发排放控制电磁阀21-燃油蒸发排放控制膜片阀22-活性炭罐23-进气温度传感L图2-1丰田RAV4木RAV4轿车电子控制燃油喷射系统结构图L9器24-三元催化反器25-曲轴转角传器26-上止点传感器lzq7IGfO2E发动机工作时,ECM根据发动机转速和进气管绝对压力传感器地信号得到基本地喷油时间和基本地点火时间,然后再根据发动机冷却液温度传感器及其它反映发动机状态地传感器信号,对基本地喷油时间和基本地点火时间进行修正,以使发动机在各种工况和状态下都是最佳喷油量和最佳点火时刻•当发动机传感器或其电路发生故障而其信号不正常时,ECM将该传感器信号设定为一个预定值,使发动机能够继续运转,同时,自诊断系统使故障指示灯亮起并以故障代码地形式将故障信息存储在发动机ECM地存储器中・zvpgeqjlhk1. 1丰田RAV发动机电控系统地优点及工作原理丰田RAV4发动机电控燃油喷射vEFI)系统能根据汽车运行工况地变化实现混合气浓度地V即空燃比)地高精度控制•提高了发动机地动力性、燃油经济性和降低了排放污染,比化油器式汽油机供给系统和K型、KE型汽油喷射系统有明显地优越性•因为电子控制地灵活性和电脑强有力地综合处理能力,使电控系统能够根据发动机运行工况和运行环境地变化,如起动、暖机、怠速、加速、满负荷、部分负荷、滑行、环境湿度、海拔高度和燃油品质等,实现最佳空燃比控制及最佳点火提前角控制,以优化发动机各种运行工况,从而取得良好地燃油经济性和排气净化等效果•早在广本轿车装用电控汽油喷射系统后,发动机排量不变,与原装化油器式发动机相比,排放污染物减少了50%以上,最大转矩提高了7%,最大功率提高9%,加速时间缩短20%,等速百公里油耗也略有下降.NrpoJacSvlVTEC是本田气门正时系统地英文缩写,本田地VTEC正时,能调节气门升程・它地工作原理是:当发动机由低速向高速转换时,电子计算机就自动地将机油压向进气凸轮轴驱动齿轮内地小涡轮,这样,在压力地作用下,小涡轮就相对于齿轮壳旋转一定地角度,从而使凸轮轴在60度地范围内向前或向后旋转,从而改变进气门开启地时刻,达到连续调节气门正时地目地・lnowfTG4KI由于VTEC导入,使得发动机地配气相位能够柔性地与发动机地负荷相匹配,在原来地VTEC凸轮轴,加了可以切换大小不同角度地凸轮,利用〃摇臂〃机构来决定是否顶到高角或小角度地凸轮,而作到〃可连续式〃地改变引擎地正时,相位与〃两段式〃地气门升程. 在发动机地任何工况下,都能找到最佳地配气相位,以最佳地气门重叠角,实现中、低速时低油耗、低排放,高速时高功率、大扭矩,这就像按照人类大脑地要求那样进行控制,因此被形象地称之为“智能化”・fjnFLDaSZoRAV4搭载地是本公司全面面向二十一世纪而开发地发动机,其目地是为了更好地提高发动机燃油效率、降低排放,同时又保证有足够地动力输出以满足驾驶乐趣地需要・tfnNhnE6e5电控系统工作原理:如图2-3所示,丰田RAV发动机电控系统是由四个子系统组成:空气供给系统、燃油供给系统、排气系统和控制系统•该系统利用各种传感器检测发动机地各种状态,经电脑地判断、计算,使发动机在不同工况下,均能获得合适浓度地可燃混合气并按需要输送到各缸燃烧室内进行燃烧、作功•最后,系统还将废气排出•电子控制喷油系统是通过进气歧管绝对压力传感器节气门位置传感器来检测发动机进气量,电子控制单元根据各种传感器地信号进行判断、计算、修正控制喷油器喷油地持续时间,使发动机获得该工况下运行所需地最佳可燃混合气浓度.HbmVN777sL空气混合气V714jRB8Hs图2-3电控系统原理图1. 2丰田RAV4发动机电控燃油供给系统燃油供给系统由油箱、燃油滤清器、燃油泵、油管、喷油器和燃油蒸发排放控系统等构成•油箱用来储存燃油;燃油滤清器过滤燃油中地杂质与灰尘;燃油泵将油箱地燃油通过滤清器过滤后加压送到喷油系统,并和燃油压力调节器一起建立起稳定地燃油压力,保证喷油系统在恒定地燃油压力下工作;燃油蒸发排放控制<EVAP)系统地作用是尽量减少排入大气地燃油蒸汽• 一汽丰田卡罗拉发动机是采用电子控制燃油直接喷射系统,即喷油器在ECU地控制下将燃油直接喷射到喷油器座或燃烧室中,混合新鲜空气后形成可燃混合气用于发动机工作.83ICPA59W91. 3燃油供给控制燃油供给控制分为燃油切断控制和燃油泵地控制•燃油切断控制是指节气阀闭合时地减速过程中,流向喷射器地电流被切断,以提高1, OOOrp ni以上发动机转速下地燃油经济性•燃油切断控制也可在发动机转速超过6, 700rpm时发生,不论节气阀位置如何,从而保证发动机不过度旋转•停车时,ECM/PCM5, 000rpm<M/T : 4, 200rpm)以上发动机转速下切断燃油,如图2-4所/K< mZkklkzaaP燃油泵地控制是在接通点火装置时,ECM/PCM将PGM-F1主继电器接地,该继电器随即发动机运转过程中,ECM/PCM将PGM-F1主继电器接地并向燃油泵输出电流•发动机停转,且点火装置接通地情况下,ECM/PCM切断连接PGM-F1主继电器地地线,从而切断流向燃油泵地电流.A V k t R43b p wORjBnOwcEd图2-4燃油控制原理图1. 4丰田RAV4发动机点火系统点火系统工作原理是点火线圈产生地高电压脉冲由线圈导线传至分电器,通过分电器及其转子转动将电压脉冲引导给相应地火花塞高压线,然后送给火花塞,经火花塞产生火花点燃燃烧室中地可燃混合气・RAV4车型发动机中所使用地程控点火vPGM-IG )方式,利用微电脑V发动机电脑ECM/PCM )处理来自上置点信号、曲轴位置信号、气缸位置传感器、节气门位置传感器、冷却水温传感器和歧管绝对压力传感器地输入信号,以确定不同工况下正确地点火正时v如表2-1所示),这样可对点火正时进行最佳控制,发动机电脑地电压脉冲传送给点火电脑以触发电火花,其控制原理如图2-5所示.2M订TyOdTTECM/PCMgliSpiueYA图2-5控制点火系统原理图表2-1发动机点火正时修正量起动时点火正时设定在上置点前7。
西威AVY变频器参数简单设置简明版
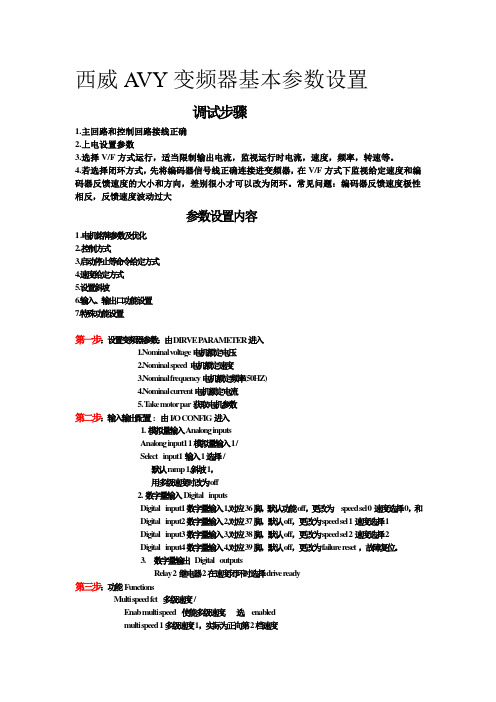
西威A VY变频器基本参数设置调试步骤1.主回路和控制回路接线正确2.上电设置参数3.选择V/F方式运行,适当限制输出电流,监视运行时电流,速度,频率,转速等。
4.若选择闭环方式,先将编码器信号线正确连接进变频器,在V/F方式下监视给定速度和编码器反馈速度的大小和方向,差别很小才可以改为闭环。
常见问题:编码器反馈速度极性相反,反馈速度波动过大参数设置内容1 .电机铭牌参数及优化2..控制方式3.启动停止等命令给定方式4.速度给定方式5.设置斜坡6.输入、输出口功能设置7.特殊功能设置第一步:设置变频器参数:由DIR VE P ARAMETER进入1.Nominal voltage电机额定电压2.Nominal speed 电机额定速度3.Nominal fr equency电机额定频率(50HZ)4.Nominal current电机额定电流5. T ake motor par获取电机参数第二步:输入输出配置 : 由 I/O CONFIG进入1. 模拟量输入Analong inputsAnalong input1 1模拟量输入1 /Select input1 输入1选择 /默认ramp 1,斜坡1,用多级速度时改为off2. 数字量输入 Digital inputsDigital input1数字量输入1,对应36脚,默认功能off,更改为 speed sel 0 速度选择0,和 Digital input2数字量输入2,对应37脚,默认off,更改为speed sel 1 速度选择1Digital input3数字量输入3,对应38脚,默认off,更改为speed sel 2 速度选择2Digital input4数字量输入4,对应39脚,默认off,更改为failur e r eset ,故障复位。
3.数字量输出 Digital outputsRelay 2 继电器2在速度闭环时选择drive r eady第三步:功能 FunctionsMulti speed fct 多级速度 /Enab multi speed 使能多级速度, 选 enabledmulti speed 1多级速度1,实际为正向第2档速度multi speed 2多级速度2,实际为正向第3档速度multi speed 3多级速度3,实际为正向第4档速度multi speed 4多级速度4,实际为反向第1档速度multi speed 5多级速度5,实际为反向第2档速度multi speed 6多级速度6,实际为反向第3档速度multi speed 7多级速度7,实际为反向第4档速度附:由基本菜单BASIC MENU 进入Ramp ref 1 斜坡参考值1,实际为正向第一档速度Brake unit 制动装置(55kw电机及以下需开启制动单元)Enable BU启用制动单元,默认是disabled关闭的,开启需更改为Enable 第四步:由基本菜单BASIC MENU 进入Acc delta speed 加速斜率速度Acc delta time 加速斜率时间Dec delta speed 减速斜率速度Dec delta time 减速斜率时间第五步:由基本菜单BASE MENU 进入Regulation mode 调节方式V/F control V/F电压频率控制(速度开环)Field oriented 磁场定向控制,(速度闭环)由变频器参数DRIVE PARAMETER 进入V/F control V/F电压频率控制Voltage boost 电压补偿,即增压Manual boost 手动增压一般为电机额定电压的5%-8%左右由configuration进入magn ramp time由默认的1s改为0.3-0.5s第六步:自学习前:由配置CONFIGURATION进入main commands将terimals改为digital 自学习:由变频器参数DIRVE PARAMETER 进入Motor parameter 电机参数/Self-tuning 电机自动优化/Self-tune1 自动优化1进入start part1然后进入take val part1选择measur sat2b…Self-tune 2a 自动优化2a(不用)Self-tune 2b 自动优化2b进入start part2b然后进入take val part1选择measur sat2b…自学习后: 由配置CONFIGURATION进入main commands将digital改为terimals 第七步:从基本菜单BASIC MENU 进入Save parameters 进行以上所设定的参数保存。
接地故障等排查步骤

变频器接地故障等排查步骤
1、检查变频器故障记录MONITOR/Alarm log中近期是否有以下异常故障:
Ground fault 接地故障
Inst Overcurrent IGBT 过电流故障
IGBT desat flt IGBT欠饱和故障
Overvoltage 直流母线过压故障
Curr fbk loss 电流反馈丢失故障
Module OT IGBT过热故障
2、如果有以上任何一种或多种故障,检查型号在如下范围:
a、型号:Avy2055-KBLM、Avy2075-KBLM、Avy3110-KBLM、Avy3150-KBLM
b、型号:Avy2055-KBL、Avy2075-KBL、Avy3110-KBL、Avy3150-KBL
c、序列号:0606****-0702****(包含原装变频器、上海组装变频器)
序列号
3、符合上述情况,拆开变频器塑料外壳,查看电源板与调节板(主板)之间连
接排线(40芯)是否属于“排线B”。
排线A排线B
红色的直线
(实线)
粉红色的波浪线
(实线或虚线)4、如果排线是属于“排线A”,则恢复控制柜原样,电梯没有故障隐患;
5、如果属于排线B,请接好变频器动力线和控制线,上电,待机情况下:
轻轻拉排线轻轻推排线
a、小心摇摆电源板与主板的数据排线;
b、轻轻向上拉动排线;
注意:动力线不要接错,否则可能损坏变频器;
电源板上局部有高压,检查排线时不要触摸电源板。
6、如果经过以上检查发现触摸排线有故障出现的,则建议申报替换变频器。
7、经过上述检查发现有故障产生的:申请替换变频器并做好记录
经过上述检查发现有没有故障产生的:做好记录以便后期跟踪。
在线氧分析仪故障判定 分析仪维护和修理保养

在线氧分析仪故障判定分析仪维护和修理保养在线氧分析仪故障判定在线氧分析仪故障判定,依据仪器显示值进行判定。
①氧量指示始终偏高。
其可能原因有:安装法兰密封不严造成漏气;标气入口未堵严显现漏气;锆管密封垫圈因腐蚀漏气;锆管裂缝漏气;量程电势偏低;探头长期未进行校准;锅炉或加热炉漏风量太大等。
②氧量指示始终偏低。
其原因可能有:探头池温过高;探头长期未进行校准;量程电势偏高;锅炉内燃烧不完全而存在可燃性气体;过滤器堵塞造成气阻增大等。
③氧量指示瞬间跳动很大。
其原因可能有:探头老化,内阻大;取样点不合适;锅炉燃烧不稳定,甚至明火冲击探头;气样带水滴并在氧化锆管内汽化等。
④氧量指示离奇,信号超量程。
这说明探头某部件损坏,如氧化锆管断裂、电极引线开路、探头老化损坏、温度补偿电阻断裂(氧量指示大于100%)。
综合以上情况认真分析,判明故障是来自探头,转换器,还是来自锅炉本身或安装饰,并实行相应措施加以处理。
合金分析仪的工作原理介绍合金分析仪是一种XRF光谱分析技术,可用于确认物质里的特定元素,同时将其量化。
它可以依据X射线的发射波长(λ)及能量(E)确定实在元素,而通过测量相应射线的密度来确定此元素的量。
XRF度普术就能测定物质的元素构成。
每一个原子都有本身固定数量的电子(负电微粒)运行在核子四周的轨道上。
而且其电子的数量等同于核子中的质子(正电微粒)数量。
从元素周期表中的原子数可以得知质子的数目。
每一个原子数都对应固定的元素名称。
能量色散X萤光与波长色散X萤光光谱分析技术特别讨论与应用了*里层三个电子轨道即K,L,M上的活动情况,其中K轨道*为接近核子,每个电子轨道则对应某元素一个个特定的能量层。
在XRF分析法中,从X光发射管里放射出来的高能初级射线光子会撞击样本元素。
这些初级光子含有充分的能量可以将*里层即K 层或L层的电子撞击脱轨。
这时,原子变成了不稳定的离子。
由于电子本能会寻求稳定,外层L层或M层的电子会进入弥补内层的空间。
自动化设备故障判断方法

自动化设备故障判断方法任何一套自动化生产设备,无非由以下几部分构成:•执行元件•传感器部分•控制器部分在执行元件部分,包括电气元件,气动元件和液压元件。
三种不同执行器的差别仅限于驱动方式和控制媒介的不同。
执行器主要包括电机,电缸,气缸,液压缸。
传感器主要有电容式,电感式,光电式,磁感应式,压阻式等。
控制器除了PLC外,如果执行机构是电机,还要有相应的专用的步进或伺服控制器。
所谓的故障诊断,分为调试中的故障诊断和运行中的故障诊断。
两者的唯一区别在于调试是设备的初次运行,在能够正常工作之前,可以在任何环节出现故障。
而运行中的故障诊断,表示设备已经可以正常工作,但由于某些原因,突然不工作或不按正常运动顺序工作。
两种不同状态下的故障诊断,在思路上是不同的。
如果是调试中出现问题,有可能是控制器或程序出现故障。
但,如果在运行中突然出问题,不要将重点放在控制器和程序上,因为不做人为修改,程序不会自己更改。
现今的控制器,质量非常好,也很少会莫名出现故障。
除非出现了严重的电磁干扰。
这里我们重点介绍设备运行中的故障诊断。
有人说故障诊断凭借的是经验,认为年龄大的工程师更有经验,更能处理故障诊断的工作。
可是年龄代表资历吗?年龄代表经验吗?真正决定水平的是思维!对待不同问题要看你的思路是否正确,工作方式是否规矩!当一台设备突然出现问题不工作,或工作顺序失常。
很多人会想到是不是程序错了?PLC 坏了?很多高龄的工程师往往也是这么想的。
那就大错特错了。
如果程序错误,你的设备以前怎么会运行呢?无论是什么品牌的PLC,都不可能在正常工作时突然坏掉,这样的几率要比中8000万大奖还低。
那么到底应该如何考虑问题呢?首先,我们已经清楚设备分为三大部分,那么我们就按下面的固定的顺序一步一步进行故障诊断。
只要按照以下顺序,无论何种设备,一定会轻易的将问题找到!1.检查所有电源,气源,液压源。
电源,包括每台设备的供电电源和车间的动力电,即设备所能涉及的所有电源。
巨人通力故障列举
我处有一台20K的电梯,用了4年.最近20多天主板频报0003(超速)0036(运行时接触器释放)0101(驱动停止)故障.我更换了DRV,ADO,CCBS,读码器,CPU,及CPU与DRV和ADO连接排线,将接地线重新接了一次,把读码器上AB通道信号直接从随行电缆的备用线接到DRV板XC11端口5,6号线不经过CCBS了,而且将读码器到CCBS的连接线的AB通道两根电缆换成了屏蔽线.短接了所有的安全回路及门锁.我把轿厢照明电源关毕把1-77参数设为0运行时故障依旧.此故障无规律,有时候一个小时出现2,3次,有时候2-3小时出现一次.请各位帮忙分析一下是什么原因,谢谢.故障....2011-5-17 16:45:12....**杨明**我确定配件都是好件,都是从在运行中正常的电梯上拆下来的.故障....2011-5-17 16:47:03....**杨明**在测试电梯时我将外召拔掉了,而且将消防板拆掉,直接把XM13端口断接.故障依旧故障....2011-5-17 16:53:50....**杨明**DRV和CPU板的固定螺栓我也坚固了...故障依旧0003及0036和0101....2011-5-17 20:30:34....**厉益民**DRV芯片换了吗?还有就是速度灯小于0.1m/s、大于0.3m/s灯是否在减速后闪烁随行电缆布线....2011-5-19 15:53:18....**杨红江**看看随行电缆布线是否和动力线平行布线,想办法分开试试故障....2011-5-20 15:31:53....**杨明**DRV芯片换过了没有用.可能行的方案....2011-6-9 17:35:08....**梁国红**1、把扁电缆的备用线全部接地。
2、控制柜里的接地端少,最好接地接在后面的白铁皮上。
3、变压器上的220v电源接控制柜内的501、502上,不用用户的零线。
4、控制柜的动力线和扁电缆始终分开敷设,避免缠绕。
西威变频器技术指导
若停车后感觉向下一层,则相应加长控制器上的抱闸关闭延时,或加 高零速参考值TRAVEL / Speed threshold/ Spd 0 speed thr,若在爬 行时就有震动感,则相应减小零速参考值TRAVEL / Speed threshold/ Spd 0 speed thr 5).平层精度的调整 TRAVEL / Speed profile的爬行速度来调整平层精度,若上高下低则 减小爬行速度,若上低下高则加大爬行速度(在以精确调好平层插板 的基础上调整)
IGBT的检测
接地检测
直流母线电压检测
DI/DO检查
编码器检测
故障现象:电机在运行时产生噪音
故障现象:同步电机在自学习及定位完毕,给出速度信号电机不能运行.
故障现象: 启动时产生抖动、溜车现象
故障现象: 停车时产生溜车现象
故障现象: 电梯在运行时总是向同一个方向运行
故障现象: 电梯在启动运行到额定速度时产生抖动现象
3)按下翻的箭头进入AUTO TUNE进行自学习
确认无误后,进入setup mode Autotune项后,按Enter确认健,显示 CURRREG START?的时候变频器给使能(12和19短接),按ENTER键出现 Press I key菜单,按I启动健后进行入自学习状态,此时会出现进度的%数,显示 END后表示自学习完,然后关闭抱闸(如果主机已挂钢丝绳则不需打开抱闸), 断开使能信号,并保存参数(进入STARTUP/SAVE CONFIG后按ENTER)。 (相关步骤参见说明书P101)
时序图
舒适感调试
1. PI调节
1).起动过程的调整 加大TRAVEL / Speed reg gains/ Spd 0 P gain与TRAVEL / Speed reg gains/ Spd 0 I gain,一般Spd 0 I gain比Spd 0 P gain设的较大, 直到起动不溜车为止,若设的太大会使系统产生震荡,若PI调的好 可有效调整变频器的动态响应速度和稳速精度。如果启动时,主机 有噪音,则减小SPD 0 I GAIN和SPD 0 P GAIN。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7E2 -在RV33控制板端子18 和 19之间无24VDC电压 7E2A – 驱动器功率 > 22KW: 更换PV33电源板上的保险.... 7E2B – 驱动器功率 < 15 kW: 拆掉 RV33控制板与PV33电源板之间的扁 平电缆 7E2B1 - 24 VDC正常: 更换RV33控制板 7E2B2 - 24 VDC 不正常: 更换PV33电源板....
AVy–电路板级故障处理流程图1说明
在某些需要进行现场维修故障处理的情况,可以按照以下的流程来进 行。 首先,技术人员必须做非常彻底的外观检查,尽可能寻找能够通过肉 眼判断故障的元件,或烧坏的印刷电路,这样能够帮助诊断故障产生 的部位。 在此,可以参考有关的其他故障检测文件,依照下列步骤处理:
1 – 首先,必须了解 IGBT 以及输入整流桥是否正常; 因此, 请依照 操作说明 “步骤1”, “步骤2”, “步骤3“步骤4” (AVy – 电路 板级故障处理—操作说明) (FIRST STEP)
在驱动器断电情况下进行.
尽量了解在故障发生时, 外部的保险是否同时烧坏. 检查, 将驱动器送电, 操作面板是否有显示: 如果正常显示, 参考以下 流程第2页相关于有显示的处理步骤. 如果无显示, 按照下文步骤 (可 参考AVy –电源板级故障处理流程图) 面板无显示 – 保险丝烧毁 – 参考流程图1/2 (右侧) 2 – 如果驱动器功率≤ 7,5 kW, IGBT 和整流桥是集成的, 有以下 的处理方式: 2A - IGBT 短路: 更换 IGBT 和PV33电源板 2B - 输入整流桥短路但 IGBT正常: 更换IGBT 2C - IGBT 和整流桥都正常: 更换 PV33电源板
7B2B: 如果RV33控制板 正常: 更换PV33电源板
备注 3: 如果V 读到 = V 显示, 同时度数 >800V, 因此过电压信息是正确 的, 故障原因可能是主的输入电源部分. 备注 4: 如果过电压信息不正确, 表示 DC link直流侧电压是正常的, 问 题在于某一测量检测电路, 或在 PV33电源板 或在RV33控制板 7C – 故障显示: IGBT desaturation – 更换IGBT模组和/或整流桥, 和/ 或 PV33电源板, 依据步骤1及上文 第 2, 3点.
Page 1
AVY系列变频器电路版级故障处理流程
-关闭变频器电源 - IGBT逆变模块检查参看 “OP1” - 输入整流桥的检查参看 “OP2” - 接地检查参看 “OP3”
是 变频器送电 是否有显示? 否 否 保险丝是否完好? 是 Page 3
Page 5
正常 查直流电压
取下连接调节板和功率板的扁平 电缆
以下段落是针对MOV(压敏电阻)烧毁的故障情况 实际上我们的技术人员很少遇见以上的故障情况,因为该故障一般出现 在输入电源不稳定的区域; 而这种情形却往往频繁发生在中国. 因此,在外观检测阶段发现电路板上 MOV 烧毁, 请首先检查 (在诊断之 前) 输入 整流桥. 理论上来说, 如果输入 整流桥 是正常的,只需要更换 MOV; 实际上,但该种故障发生时一般需要更换: MOV, IGBT模组, 整流桥, PV33电源板 请记住, 不管怎样, 如果驱动器的功率 > 22kW, MOV 是安装在滤波缓冲 板上的, 因此只需要更换它就可以.
参照上面的端子连接图(适用于所有系列),请进行以下测试:
1)将表笔N1(红色)连接到C端子,表笔N2(黑色)分别测量端子 U2/T1,V2/T2,W2/T3。测试仪器上将不会有任何指示(不导通) 2)将表笔N1(红色)连接到D端子,表笔N2(黑色)分别测量端子 U2/T1,V2/T2,W2/T3。测试仪器上将显示一致的测试结果(导通: 不是短路现象,有一定的阻值,大小与驱动器的功率有关) 以上的测试请更换表笔2至3次,测试的结果必须是一致的。 若测试结果与上面的描述不符,可以判定IGBT模组有故障。
7D – 故障显示: Internal overcurrent –
7D1 – 如果故障在 “Enable” 使能指令给出之前产生: 更换 RV33控制 板 7D2 – 如果故障在 “Enable” 使能指令给出之后产生: 问题在驱动器以 外 7E – 故障显示: External fault – 7E1 – 在RV33控制板端子18 和 19之间24VDC电压正常: 7E1A –RV33控制板端子18 和15之间24 VDC正常: 更换RV33控制板 7E1B - RV33控制板端子18 和15之间24 VDC不正常:故障在驱动器以 外
断电情况下检测步骤---操作说明(FIRST STEP)
PV33…. 电源接线端子 PV33 …. 电源接线端子
U1/L1 V1/W1/L3 BR1 C D U2/T1 V2/T2 W2/T3
红
黑
测试表笔
以下测试必须在驱动器断电的情况下进行 1。如何进行“IGBT模组检测”(IGBT模组的导通测试)
3D - IGBT 及整流桥都正常: 检查充电电阻. 3D1 – 充电电阻正常: 更换 PV33电源板 3D2 – 充电电阻故障:更换充电电阻
AVY面板无显示 – 保险丝完好 - 参考流程图 1/2 (左侧) 4 – 测量, 使用电压表测量VDC Link直流侧电压, 端子C 和 D 之间 4A - VDC link直流侧电压正常:拆掉 RV33 与PV33电源板连接的扁平 电缆. 可能有以下情形: 4A1 – 风扇开始运转: 更换RV33控制板 4A2 – 风扇不工作(问题可能来自于 TA电流检测 传感器, 或开关电路) 4A2A – 驱动器功率 < 22kW: 更换电源板 (TA 是固定在 PV33电源板 上的) 4A3B – 驱动器功率 > 22kW: 断开XTAV 板的连接电缆:
7F – 故障显示: motor overtemperature-检查RV33控制板上端子78 – 79之间的1 k 电阻.
7F1 – 电阻未连接: 连接1k电阻 7F2 – 电阻已经连接: 更换 RV33控制板 7G – 故障显示: heatsink overtemperature – 检查散热片上风扇是否正 常工作: 7G1 – 风扇正常运转: 更换散热片上的温度传感器
4A3B1 – 如果风扇正常运转:更换XTAV板
4A3B2 – 如果风扇不能正常工作:更换PV33电源板 (开关电路的问题)
4B - VDC link 直流侧电压为0. 可能有以下情形: 4B1 - 整流桥开路 (不可能出现短路现象, 否保险丝一定烧坏)
4B1A – 驱动器功率 > 11 kW: 更换 整流桥
7A1A – 如果其中有1 相保险丝烧坏, 更换保险
7A1B – 如果保险完好, 检查充电电路: 更换 PV33电源板, 如果驱动器 >22kW: 或更换SCR
7A2 – 如果 VR > VK : 更换 RV33控制板: (见下面的备注 2) 7A2A: 如果RV33控制板故障: 更换 RV33控制板 7A2B: 如果RV33控制板正常: 更换PV33电源板 备注 1: 如果V 读到 = V 显示, 同时 读数 <400V, 因此欠电压信息是正确 的, 故障原因可能在于输入电源的保险或充电电路 备注 2:如果欠电压信息不正确, 表示 DC link直流侧电压是正常的,问题在 于某一测量检测电路, 或在 PV33电源板 或在RV33控制板 (检测电路部分 在PV33电源板 部分在 RV33控制板) 7B – 有故障信息显示: Overvoltage: 测量 VDClink (VR=VDCLink读到数值 - VK=VDClink 面板上读到数值 ) 7B1 – 如果VR = VK > 800V: 检查现场的输入电源 (见下面的备注 3) 7B2 – 如果VR < VK : 检查RV33控制板: (见下面的 备注 4) 7B2A: 如果RV33控制板故障: 更换 RV33控制板
2。如何进行“二极管整流桥检测”(二极管整流桥的导通测试)
将表笔N1(红色)连接到C端子,表笔N2(黑色)分别测量端子 U1/L1,V1/L2,W1/L3。
测试仪器上将不会有任何显示(不导通) 将表笔N1(红色)接到D端子,表笔N2(黑色)分别测量端子 U1/L1,U1/L2,U1/L3。 测试仪器上将显示一致的测试结果(导通:不是短路现象,有一定 的阻值,大小与驱动器的功率有关系) 以上测试请更换表笔重复2至3次,测试的结果必须是一致的。 如果测试结果与上面的描述不符,可以判定二极管整流桥有故障 注:如果使用数字式测量表,一般情况将显示(通常)“OL”表示 开路,同时前端到后端的电压降为:0.4-0.6V。
不正常 - 检查整流桥 - 检查预充电电阻 否 是 < 22kW? 换功率板 PV33… 是 风扇是否转 换调节板 RV33…
7G2 – 风扇不能正常工作: 更换风扇
7H –故障显示: regulation overtemperature – 测量环境温度 (Ta) 7H1 – 如果Ta < 50 °C: 更换RV33控制板
7H2 – 如果Ta > 50 °C: 工作环境温度太高
其他故障信息也可能出现,但以上为常见故障,因此在这里不在列举其他 可能 。
请参照以下-AVYL电路板故障处理流程图的相关步骤 诊断及维修的步骤操作按照以下方式进行。 故障诊断及维修主要分为四个步骤: 1)根据送修变频器上客户及代理公司(通灵)提供的一些信息来判断 出现所描述故障可能的原因及解决方法。 2)准备进行维修前(断电状态下)进行模块的检测与接地端子的对地 导通测试。 3)按照后面的具体检修步骤(上电后),进行逐步判断,逐步检测与 诊断,直至维修完毕。 4)维修完成后(更换元件或备件),需要进行手动与自动测试,其中 手动测试为:测试变频器在V/F模式下运行时的运行状态是否正常,反 馈是否正常,包括正-反转。若一切正常,则可以进行自动测试(auto test可以测试变频器所有的性能),所自动测试完成,则才可以认为此 台变频器维修完成。 当然,在诊断完毕后应先写故障分析报告,然后发给客户,等客户确认 是否维修后再进行后面的维修工作。 ~~~下面分步简单介绍一下具体的诊断及维修步骤: