光学式运动捕捉系统
光学运动捕捉的贴点方式

光学运动捕捉的贴点方式英文回答:Optical motion capture is a technology used to track and record the movement of objects or individuals in real-time. It is commonly used in the entertainment industry for creating realistic animations in movies and video games. There are several ways to attach markers or "dots" to the subject being tracked in optical motion capture.One common method is using passive markers, which are small reflective spheres that are attached to the subject's body or clothing. These markers reflect light emitted by infrared cameras, allowing the system to track their position and movement. The advantage of passive markers is that they are relatively easy to attach and do not require any power source. However, they can be easily occluded or obscured, especially in complex movements or when multiple subjects are involved.Another method is using active markers, which are small LED lights that emit their own light. These markers are typically attached to the subject using adhesive or Velcro straps. The advantage of active markers is that they are more visible and can be easily tracked even in challenging conditions. However, they require a power source, usuallyin the form of a battery, and can be more expensive to use.In addition to markers, some optical motion capture systems also use cameras with built-in sensors to capture the movement of the subject without the need for physical markers. These systems rely on advanced computer vision algorithms to track and analyze the movement of the subject based on the images captured by the cameras. While markerless systems offer more flexibility and freedom of movement, they can be less accurate and require more computational power.Overall, the choice of marker attachment method depends on the specific requirements of the motion capture project. Passive markers are often used for capturing general body movements, while active markers are preferred for capturingprecise movements or in situations where occlusion is a concern. Markerless systems are typically used insituations where marker attachment is not feasible or desired.中文回答:光学运动捕捉是一种用于实时追踪和记录物体或个体运动的技术。
运动捕捉简介

运动捕捉简介编者按:伴随着CG产业的飞速发展,运动捕捉技术(Motion Capture)⽇趋成熟。
运动捕捉系统正越来越多的应⽤于影视、动画、游戏的制作中,与此同时也带动系统制造商朝着提升稳定性、追求操作效率、拓展系统应⽤弹性以及降低系统成本等⽅向全⾯发展。
在国内,虽然⽬前只有少数⼏家企业拥有此类设备,但对运动捕捉系统的需求正在飞速膨胀,业界也正以前所未有的眼光关注这项技术。
据统计,⽬前国内三维制造业对运动捕捉系统的使⽤⽐例⾼达60%,更多企业通过合作或租⽤等⽅式将运动捕捉系统应⽤于⾃⼰的产品中,⽽诸如迪⽣、东锐等系统制造商也纷纷加⼊进来,研发具有⾃主知识产权的国产运动捕捉系统。
CGM在前⼏期曾对运动捕捉有过介绍性的⽂章,⼩编希望通过这期的内容使读者对运动捕捉系统有⼀个较为全⾯的认识,同时对这⼀系统在⾏业内的应⽤起到积极的推动作⽤。
运动捕捉技术是记录⼈体运动信息以供分析和回放的技术。
捕捉的数据既可简单到记录躯体部件的空间位置,也可复杂到记录脸部和肌⾁群的细致运动。
⽽应⽤在电脑⾓⾊动画的运动捕捉则涉及到如何把真⼈动作转换为数字演员的动作,这种转换映射可以是直接的,像⽤真⼈演员的⼿臂运动控制数字演员的⼿臂动作;也可以是间接的,像⽤真⼈演员的⼿臂和⼿指动作来控制数字演员的⽪肤颜⾊和情绪等。
在表演动画系统中,表演者负责根据剧情做出各种动作和表情,运动捕捉系统将这些动作和表情捕捉并记录下来,然后通过动画软件,⽤这些动作和表情驱动⾓⾊模型,⾓⾊模型就能做出与表演者⼀样的动作和表情,并⽣成最终所见的动画序列。
运动捕捉的任务是检测、记录表演者的肢体在三维空间的运动轨迹,捕捉表演者的动作,并将其转化为数字化的"抽象运动"。
实际上,运动捕捉的对象不仅仅是表演者的动作,还可以包括物体的运动、表演者的表情、相机及灯光的运动等。
这⼀技术是⽬前表演动画系统中最关键、最复杂也是最不成熟的⼀个环节,是表演动画系统不可缺少的部分。
光惯混合动捕

光惯混合动捕
光惯混合动作捕捉系统是一个结合了光学与惯性系统的先进空间定位工具。
光惯混合动作捕捉系统由运动捕捉摄像机、6个光惯混合定位追踪器和分析软件
组成。每个光惯混合定位追踪器都配备了4个光学mark点,其主动发光850nm;
同时整合了三轴加速度计、三轴陀螺仪、三轴磁力计和气压计。其中,加速度计
量程可达±16g,陀螺仪的量程高达±2000dps。
该系统既能利用光学定位的高精度性,又能借助惯性导航系统提供稳定的姿态数
据,即便是Mark点被遮挡的情况下,该系统也能不受干扰地进行精准数据采集,
进而实现持续、无缝、高精度的空间与追踪。
如需了解更多关于光惯混合动捕的信息,建议咨询光惯混合动捕的业内人士,或
者查阅光惯混合动捕的相关书籍、文献。
动作捕捉技术发展

无标记面部捕捉
无标记系统基于面部识别技术,借助脸部的特征 如鼻孔、嘴角和眼角,以及皱纹来逐帧进行跟踪。 还可以分析瞳孔的运动、眼睑、被嘴唇遮挡的牙 齿等,避免了传统动画捕捉中所遇到的盲点。 无标记系统最主要的限制是画面的精度和帧率。 这些问题可以通过高速高精度摄像机进行弥补。
《本杰明·巴顿》无标记面部捕捉技术
动作捕捉现场
被动式标记点
主动式标记点
时间调制式主动标记点 表演捕捉(Performance MoCap)
被动式标记点: 最大的优点是精度高,精度可以达到像素级。 构造简单,捕捉范围大,无运动方式限制。 可以根据不同捕捉需求灵活变化。 建设成本高,最少需要6台摄影机和专业的摄影棚。
主动式标记点:
成本低廉,没有干扰。 自由度非常低,不能捕捉较复杂的动作。
电磁式(Magnetic) 将电磁传感器安装到捕捉物体上来接受由发射器 发出的磁场讯号,从而得到传感器的坐标位置与 关节旋转量的信息。 由于每个传感器都是用不同频率传输数据,不会 有辨识上的问题,但传感器的数量有限,且极易 受环境中的电磁波干扰。
惯性运动捕捉 基于微缩惯性传感器、生物力学模型和传感器融 合算法等技术。 大部分惯性系统使用陀螺仪来测量旋转比率,再 通过无线wifi将运动数据传递到一台计算机上, 并与软件中的骨骼匹配。 无须解算、便于携带、更大的捕捉区域。 定位精度低、定位漂移。
任天堂的游戏机Wii的控制手柄采用了惯性运动捕捉
解决被动式系统光球被遮住的问题,将标记点改为主动 发射光线的LED。 主动发光可以直接将光线发送到摄影机,减少光线路线 距离,带来更大的捕捉范围。 主动式系统采用的LED(发光二极管)标记点体积较 大,无法捕捉太细致的动作(如脸部表情),而且光球 数量越多,取样会越不精确。
光学动作捕捉课堂笔记
光学动作捕捉课堂笔记光学动作捕捉技术与应用第一讲动作捕捉概述1、动作捕捉是一门综合计算机图形学、电子、机械、光学、计算机视觉/软件等技术捕捉表演者的肢体、表情,产生三维数据,对这些数据进行分析、处理的过程。
(技术方法)(sample、record)→3D2、获取动作信息的方法:模型模拟、艺术造型、动作捕捉。
3、捕捉动作的特点:1)真实性;2)速度快;3)可控性;4)经济性;5)可编辑性。
4、动作捕捉的产生和发展5、动作捕捉系统的类型1)机械式(传感器)优点:实时、成本低、精度高、易标定、无电磁干扰、捕捉范围大、易携带缺点:捕捉动作有限、传感器配置不灵活、易损坏、采样速率低、无全局位移2)电磁式发射源、接受传感器、数据处理显示优点:六维信息(位置x、y、z + 旋转)、实时性好、速度快、标定简单、相对便宜、可多人同时捕捉缺点:电磁干扰、范围有限、比光学式采样速率低、容易出现噪音、配置不灵活3)声学式发送器、接受器、处理单元优点:技术相对简单4)光学式:通过对目标特定光点的监视和跟踪来完成运动捕捉的任务。
两台摄像机同时拍到,可确定物体的空间位置。
高速拍摄→运动轨迹主/被动式优点:数据准确、捕捉空间大、速度快、标定简单、表演者受限小、可多人同时捕捉、标识球数目可变缺点:昂贵、数据需要处理、数据可能丢失、现场光需要控制、实时性局限位置→传感→光学→电信号6.捕捉的动作类型肢体动作、局部肢体动作、面部表情、皮肤动作、动物与玩偶第二讲捕捉系统的构成及技术分析(以光学系统为例)1、动作捕捉系统的构成(1)传感器固定在运动物体上,把位置信息转化成捕捉装置可接收的信息。
(2)信号捕捉设施位置信号的捕捉:对光学动作捕捉系统,高分辨率红外摄像机(3)数据传输设备将大量的运动数据从信号捕捉设备快速准确地传输到计算机系统进行处理。
实时、准确、多通道传输、同步(4)数据处理部分(使用计算机软件)根据应用类型和应用目的,处理成所需要的形式。
光学动作捕捉中的反光标识点(Marker点)

光学动作捕捉系统中的反光标识点(Marker点)动作捕捉系统本质上是一种定位系统,通常需要在目标物布置定位设备进行追踪。
以红外光学为原理的动作捕捉系统,主要由由光学镜头、动作捕捉软件、反光标识点、POE 交换机、和若干配件组成,其中反光标识点(Marker点)即为布置在目标物上的一种特殊球体。
红外光学原理的动作捕捉系统分为主动式和被动式,其区别之一就在于反光标识点。
主动式原理的反光标识点需连接电源主动发光,从而光学相机能够获取其空间位置。
而被动式光学原理中的反光标识小球,是一种表面涂有反光材料的小球,无连接线,不需要电源,内部没有任何电子元件,它固定在被捕捉物表面反射镜头发出的红外光,进而被多个镜头上的感应器矩阵接收,并获取其球心三维坐标。
本文将进行被动式光学原理的动作捕捉系统中反光标识点(Marker点)的相关介绍。
不同的应用场景下适配不同的反光标识点(Marker点)类型,例如当被捕捉物尺寸偏小时,需要较小的Marker与之适配,而当其表面非常光滑时,又需要带有双面粘性底座的反光标识点(Marker点)进行固定。
反光标识点(Marker点)尺寸与固定方式尺寸反光标识点的大小选择选择通常与被捕捉物类型与尺寸有关,当捕捉人体全身动作时,常用直径12~15mm反光标识点(Marker点),而捕捉人体手部、足部、面部的精细动作时,常使用直径小于8mm的小尺寸反光标识点(Marker点)。
而在自动化方向常见的无人机、机器人等多智能体室内定位与位姿捕捉,通常使用8~12mm反光标识点(Marker点),另外,如果是使用场景空间与被捕捉物尺寸都比较大的情况,则使用直径大于15mm的Marker。
固定方式为保证系统正常使用,需要反光标识点(Marker点)能够稳定地固定在被捕捉物表面,反光标识点(Marker点)主要通过勾面底座、平面底座以及无底座三种方式进行固定。
勾面底座:即尼龙搭扣方式,通过勾面规定到被测物表面的贴有的背胶魔术贴。
动作捕捉系统
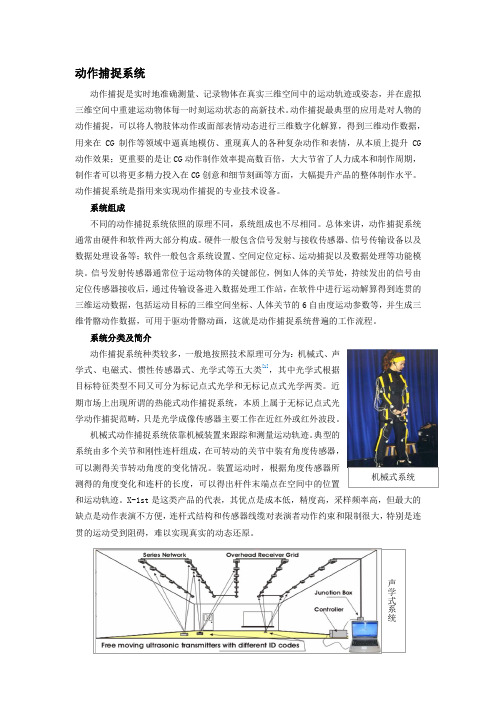
动作捕捉系统动作捕捉是实时地准确测量、记录物体在真实三维空间中的运动轨迹或姿态,并在虚拟三维空间中重建运动物体每一时刻运动状态的高新技术。
动作捕捉最典型的应用是对人物的动作捕捉,可以将人物肢体动作或面部表情动态进行三维数字化解算,得到三维动作数据,用来在CG 制作等领域中逼真地模仿、重现真人的各种复杂动作和表情,从本质上提升CG 动作效果;更重要的是让CG 动作制作效率提高数百倍,大大节省了人力成本和制作周期,制作者可以将更多精力投入在CG 创意和细节刻画等方面,大幅提升产品的整体制作水平。
动作捕捉系统是指用来实现动作捕捉的专业技术设备。
系统组成不同的动作捕捉系统依照的原理不同,系统组成也不尽相同。
总体来讲,动作捕捉系统通常由硬件和软件两大部分构成。
硬件一般包含信号发射与接收传感器、信号传输设备以及数据处理设备等;软件一般包含系统设置、空间定位定标、运动捕捉以及数据处理等功能模块。
信号发射传感器通常位于运动物体的关键部位,例如人体的关节处,持续发出的信号由定位传感器接收后,通过传输设备进入数据处理工作站,在软件中进行运动解算得到连贯的三维运动数据,包括运动目标的三维空间坐标、人体关节的6自由度运动参数等,并生成三维骨骼动作数据,可用于驱动骨骼动画,这就是动作捕捉系统普遍的工作流程。
系统分类及简介动作捕捉系统种类较多,一般地按照技术原理可分为:机械式、声学式、电磁式、惯性传感器式、光学式等五大类[1],其中光学式根据目标特征类型不同又可分为标记点式光学和无标记点式光学两类。
近期市场上出现所谓的热能式动作捕捉系统,本质上属于无标记点式光学动作捕捉范畴,只是光学成像传感器主要工作在近红外或红外波段。
机械式动作捕捉系统依靠机械装置来跟踪和测量运动轨迹。
典型的系统由多个关节和刚性连杆组成,在可转动的关节中装有角度传感器,可以测得关节转动角度的变化情况。
装置运动时,根据角度传感器所测得的角度变化和连杆的长度,可以得出杆件末端点在空间中的位置和运动轨迹。
体育动作捕捉系统考核试卷

2.光学式动作捕捉系统不会受到环境光线的影响。()
3.动作捕捉服上的标记点越多,捕捉到的数据越精确。()
4. 3D扫描仪是动作捕捉系统中的必备设备。()
5.动作捕捉系统可以实时提供运动员的动作反馈。(√)
6.在所有的动作捕捉技术中,声学式捕捉技术最为成熟。(×)
12.以下哪个软件主要用于体育动作捕捉系统的数据分析?()
A. Excel
B. MATLAB
C. Adobe Premiere
D. After Effects
13.在体育动作捕捉系统中,以下哪个设备用于捕捉运动员的动作轨迹?()
A. 3D扫描仪
B.数据手套
C.动作捕捉服
D.传感器
14.以下哪个因素会影响动作捕捉系统在体育领域的应用效果?()
B.摄像头的分辨率
C.环境光线
D.运动员的移动速度
5.动作捕捉系统在体育训练中的作用可能包括以下哪些?()
A.提高运动员的动作质量
B.降低运动伤害的风险
C.提供实时反馈
D.增加训练的趣味性
6.以下哪些软件可以用于动作捕捉数据的处理?()
A. MotionBuilder
B. Blender
C. Microsoft Excel
9. A
10. D
11. C
12. B
13. C
14. D
15. D
16. D
17. C
18. A
19. D
20. D
二、多选题
1. ABCD
2. ABC
3. ABC
4. ABCD
5. ABC
6. ABD
7. ABC
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光学运动捕捉技术简介 光学式运动捕捉通过对目标上特定光点的监视和跟踪来完成运动捕捉的任务。目前常见的光学式运动捕捉大多基于计算机视觉原理。从理论上说,对于空间中的一个点,只要它能同时为两部相机所见,则根据同一时刻两部相机所拍摄的图像和相机参数,可以确定这一时刻该点在空间中的位置。当相机以足够高的速率连续拍摄时,从图像序列中就可以得到该点的运动轨迹。典型的光学式运动捕捉系统通常使用6~8个相机环绕表演场地排列,这些相机的视野重叠区域就是表演者的动作范围。为了便于处理,通常要求表演者穿上单色的服装,在身体的关键部位,如关节、髋部、肘、腕等位置贴上一些特制的标志或发光点,称为"Marker",视觉系统将识别和处理这些标志,如图4所示。系统定标后,相机连续拍摄表演者的动作,并将图像序列保存下来,然后再进行分析和处理,识别其中的标志点,并计算其在每一瞬间的空间位置,进而得到其运动轨迹。为了得到准确的运动轨迹,相机应有较高的拍摄速率,一般要达到每秒60帧以上。 如果在表演者的脸部表情关键点贴上Marker,则可以实现表情捕捉,如图5所示。目前大部分表情捕捉都采用光学式。 有些光学运动捕捉系统不依靠Marker作为识别标志,例如根据目标的侧影来提取其运动信息,或者利用有网格的背景简化处理过程等。目前研究人员正在研究不依靠Marker,而应用图像识别、分析技术,由视觉系统直接识别表演者身体关键部位并测量其运动轨迹的技术,估计将很快投入实用。 光学式运动捕捉的优点是表演者活动范围大,无电缆、机械装置的限制,表演者可以自由地表演,使用很方便。其采样速率较高,可以满足多数高速运动测量的需要。Marker的价格便宜,便于扩充。
Motion Capture 的原理 运动捕捉系统是一种用于准确测量运动物体在三维空间运动状况的高技术设备。它基于计算机图形学原理,通过排布在空间中的数个视频捕捉设备将运动物体(跟踪器)的运动状况以图象的形式记录下来,然后使用计算机对该图象数据进行处理,得到不同时间计量单位上不同物体(跟踪器)的空间坐标(X,Y,Z)。该技术在众多的领域中都有十分广泛的应用。在体育训练中它可以帮助教练员从不同的视角观察运动员的动作,并且将位置、速度、加速度等数据进行量化处理,使教练员能够有的放矢地纠正运动员的技术动作,从而大大提高系列效果;在动画制作上,它可以轻而易举地制作出各种人物、动物的复杂动作,使动画制作流程变得简捷高效;在医学的康复治疗领域,它可以准确测量并记录下需要肢体康复治疗的病人的各种运动数据,同时可以为医生观察、分析病人的运动提供诸多帮助;另外该系统在步态分析、虚拟现实、运动分析、机器人控制等诸多领域都有着将巨大的应用前景。目前,世界上只有少数几个发达国家拥有这一生产技术,并垄断着巨大的国际市场。
运动捕捉分类 在表演动画系统中,表演者负责根据剧情做出各种动作和表情,运动捕捉系统将这些动作和表情捕捉并记录下来,然后通过动画软件,用这些动作和表情驱动角色模型,角色模型就能做出与表演者一样的动作和表情,并生成最终所见的动画序列。运动捕捉的任务是检测、记录表演者的肢体在三维空间的运动轨迹,捕捉表演者的动作,并将其转化为数字化的"抽象运动"。实际上,运动捕捉的对象不仅仅是表演者的动作,还可以包括物体的运动、表演者的表情、相机及灯光的运动等。这一技术是目前表演动画系统中最关键、最复杂也是最不成熟的一个环节,是表演动画系统不可缺少的部分。 在表演动画系统中,通常并不要求捕捉表演者身上每个点的动作,而只需要捕捉若干个关键点的运动轨迹,再根据造型中各部分的物理、生理约束就可以合成最终的运动画面。 从应用角度来看,表演动画系统主要有表情捕捉和身体运动捕捉两类;从实时性来看,可分为实时捕捉系统和非实时捕捉系统两种。 用于动画制作的运动捕捉技术的出现可以追溯到20世纪70年代,迪斯尼公司曾试图通过捕捉演员的动作以改进动画制作效果。当计算机技术刚开始应用于动画制作时,纽约计算机图形技术实验室的Rebecca Allen就设计了一种光学装置,将演员的表演姿势投射在计算机屏幕上,作为动画制作的参考。之后从20世纪80年代开始,美国Biomechanics实验室、Simon Fraser大学、麻省理工学院等开展了计算机人体运动捕捉的研究。此后,运动捕捉技术吸引了越来越多的研究人员和开发商的目光,并从试用性研究逐步走向了实用化。1988年,SGI公司开发了可捕捉人头部运动和表情的系统。随着计算机软硬件技术的飞速发展和动画制作要求的提高,目前在发达国家,运动捕捉已经进入了实用化阶段,有多家厂商相继推出了多种商品化的运动捕捉设备,如Vicon、Polhemus、Sega Interactive、MAC、X-Ist、FilmBox、MotionAnalysis等,其应用领域也远远超出了表演动画,并成功地用于虚拟现实、游戏、人体工程学研究、模拟训练、生物力学研究等许多方面。 到目前为止,常用的运动捕捉技术从原理上说可分为机械式、声学式、电磁式和光学式。同时,不依赖于专用传感器,而直接识别人体特征的运动捕捉技术也将很快走向实用。不同原理的设备各有其优缺点,一般可从以下几个方面进行评价:定位精度;实时性;使用方便程度;可捕捉运动范围大小;成本;抗干扰性;多目标捕捉能力。 从技术的角度来说,运动捕捉的实质就是要测量、跟踪、记录物体在三维空间中的运动轨迹。典型的运动捕捉设备一般由以下几个部分组成: 传感器 被固定在运动物体特定的部位,向系统提供运动的位置信息。 信号捕捉设备 负责捕捉、识别传感器的信号。 数据传输设备 负责将运动数据从信号捕捉设备快速准确地传送到计算机系统。 数据处理设备 负责处理系统捕捉到的原始信号,计算传感器的运动轨迹,对数据进行修正、处理,并与三维角色模型相结合。 技术之一:机械式运动捕捉 机械式运动捕捉依靠机械装置来跟踪和测量运动轨迹。典型的系统由多个关节和刚性连杆组成,在可转动的关节中装有角度传感器,可以测得关节转动角度的变化情况。装置运动时,根据角度传感器所测得的角度变化和连杆的长度,可以得出杆件末端点在空间中的位置和运动轨迹。实际上,装置上任何一点的运动轨迹都可以求出,刚性连杆也可以换成长度可变的伸缩杆,用位移传感器测量其长度的变化。 早期的一种机械式运动捕捉装置是用带角度传感器的关节和连杆构成一个"可调姿态的数字模型",其形状可以模拟人体,也可以模拟其他动物或物体。使用者可根据剧情的需要调整模型的姿态,然后锁定。角度传感器测量并记录关节的转动角度,依据这些角度和模型的机械尺寸,可计算出模型的姿态,并将这些姿态数据传给动画软件,使其中的角色模型也做出一样的姿态。这是一种较早出现的运动捕捉装置,但直到现在仍有一定的市场。国外给这种装置起了个很形象的名字:"猴子"。 机械式运动捕捉的一种应用形式是将欲捕捉的运动物体与机械结构相连,物体运动带动机械装置,从而被传感器实时记录下来。X-Ist的FullBodyTracker是一种颇具代表性的机械式运动捕捉产品。
这种方法的优点是成本低,精度也较高,可以做到实时测量,还可容许多个角色同时表演。但其缺点也非常明显,主要是使用起来非常不方便,机械结构对表演者的动作阻碍和限制很大。而"猴子"较难用于连续动作的实时捕捉,需要操作者不断根据剧情要求调整"猴子"的姿势,很麻烦,主要用于静态造型捕捉和关键帧的确定。 技术之二:声学式运动捕捉 常用的声学式运动捕捉装置由发送器、接收器和处理单元组成。发送器是一个固定的超声波发生器,接收器一般由呈三角形排列的三个超声探头组成。通过测量声波从发送器到接收器的时间或者相位差,系统可以计算并确定接收器的位置和方向。Logitech、SAC等公司都生产超声波运动捕捉设备。 这类装置成本较低,但对运动的捕捉有较大延迟和滞后,实时性较差,精度一般不很高,声源和接收器间不能有大的遮挡物体,受噪声和多次反射等干扰较大。由于空气中声波的速度与气压、湿度、温度有关,所以还必须在算法中做出相应的补偿。 技术之三:电磁式运动捕捉 电磁式运动捕捉系统是目前比较常用的运动捕捉设备。一般由发射源、接收传感器和数据处理单元组成。发射源在空间产生按一定时空规律分布的电磁场;接收传感器(通常有10~20个)安置在表演者身体的关键位置,随着表演者的动作在电磁场中运动,通过电缆或无线方式与数据处理单元相连,见图2和图3所示。 表演者在电磁场内表演时,接收传感器将接收到的信号通过电缆传送给处理单元,根据这些信号可以解算出每个传感器的空间位置和方向。Polhemus公司和Ascension公司均以生产电磁式运动捕捉设备而著称。目前这类系统的采样速率一般为每秒15~120次(依赖于模型和传感器的数量),为了消除抖动和干扰,采样速率一般在15Hz以下。对于一些高速运动,如拳击、篮球比赛等,该采样速度还不能满足要求。电磁式运动捕捉的优点首先在于它记录的是六维信息,即不仅能得到空间位置,还能得到方向信息,这一点对某些特殊的应用场合很有价值。其次是速度快,实时性好,表演者表演时,动画系统中的角色模型可以同时反应,便于排演、调整和修改。装置的定标比较简单,技术较成熟,鲁棒性好,成本相对低廉。 它的缺点在于对环境要求严格,在表演场地附近不能有金属物品,否则会造成电磁场畸变,影响精度。系统的允许表演范围比光学式要小,特别是电缆对表演者的活动限制比较大,对于比较剧烈的运动和表演则不适用。 技术之四:光学式运动捕捉 光学式运动捕捉通过对目标上特定光点的监视和跟踪来完成运动捕捉的任务。目前常见的光学式运动捕捉大多基于计算机视觉原理。从理论上说,对于空间中的一个点,只要它能同时为两部相机所见,则根据同一时刻两部相机所拍摄的图像和相机参数,可以确定这一时刻该点在空间中的位置。当相机以足够高的速率连续拍摄时,从图像序列中就可以得到该点的运动轨迹。 典型的光学式运动捕捉系统通常使用6~8个相机环绕表演场地排列,这些相机的视野重叠区域就是表演者的动作范围。为了便于处理,通常要求表演者穿上单色的服装,在身体的关键部位,如关节、髋部、肘、腕等位置贴上一些特制的标志或发光点,称为"Marker",视觉系统将识别和处理这些标志,如图4所示。系统定标后,相机连续拍摄表演者的动作,并将图像序列保存下来,然后再进行分析和处理,识别其中的标志点,并计算其在每一瞬间的空间位置,进而得到其运动轨迹。为了得到准确的运动轨迹,相机应有较高的拍摄速率,一般要达到每秒60帧以上。 如果在表演者的脸部表情关键点贴上Marker,则可以实现表情捕捉,如图5所示。目前大部分表情捕捉都采用光学式。